无线光传输中继技术的应用研究
2022-04-02 14:40:50赵志鹏许新勇俸玉祥徐维开
计算机应用文摘·触控 2022年4期
赵志鹏 许新勇 俸玉祥 徐维开
关键词 无线光通信 聚焦对准 北斗定位 路由交换
1无线光通信的发展现状
无线光通信设备以激光作为信息载体、大气作为传输媒介,具有通信容量大、抗干扰能力强、保密性好、机动性灵活等优点,特别适用于机动作战通信、临时通信、复杂电磁环境通信、保密通信和不便铺设光缆等多种场景[1] 。因此,将该设备以车载形式进行应用,可以实现光缆网到阵地通信节点、阵地通信节点之间及通信车之间的信息传输。在无线电静默、复杂电磁环境等场景下应用无线光通信设备,可以提高通信节点间的抗毁性、机动性、隐身性、自保性等。
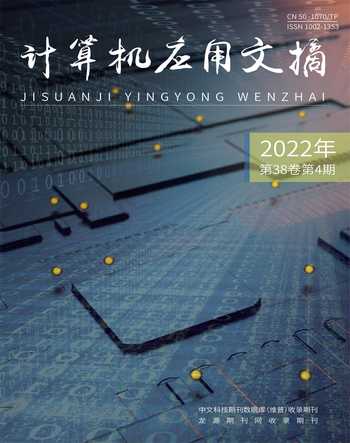
无线光通信设备负责车辆平台之间的无线光通信,包括无线光通信设备两端以及配套附件。无线光通信设备主要由五个部分组成,如图1 所示。
光学天线单元通过无线光发射、无线光接收、光路扫描定位跟踪实现无线光信号的收发。其分为接收部分与发送部分: 发送部分可以实现电信号转换为无线光信号及信号的增益放大功能;接收部分可以实现弱小无线激光信号的接收、增益大、信道编码纠错、激光的驱动功能。
伺服单元通过接收端伺服发送过来的经纬度位置信息,按照接收位置信息进行初始对准和实现端目标运行轨迹惯性的稳定[2] 。
扫描捕获跟踪单元可以实现两侧无线光传输设备的定位扫描、轨迹跟踪、聚焦对准、方向的稳定,并确保收发光路稳定可靠、精确对准,从而实现无线激光通信链路的互通。
在使用无线光通信设备的过程中存在两大问题:受地形影响,无线光通信设备极易被树木、山丘阻挡,使用范围受限;受天气、太阳光反射、温湿度等影响,导致聚焦对准困难、通信传输距离受限、通信传输信道不稳定。而无线光传输中继技术则可以有效解决上述问题[3] 。
2无线光传输中继系统
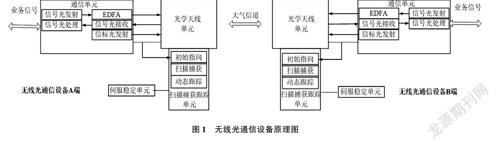
无线光传输中继设备由无人机进行搭载,系统配备2 台无线光传输设备、1 台路由器、1 台北斗设备。北斗设备具备定位、短消息发送功能,其将无线光传输中继设备的位置信息发送给接收方,接收方收到位置信息后进行扫描对准;路由器可以实现2 台无线光传输中继设备的交数据换功能;无线光传输中继设备用于收发两端的无线光数据传输。无线光传输中继系统如图2 所示。
3无线光传输中继系统的工作原理
3.1通信单元的基本原理
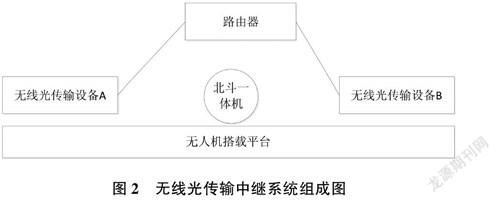
通信单元可以将业务电信号转换为适合大气信道传输的激光信号(工作原理如图3 所示):首先,光缆传输业务光信号给光学天线,再通过光模块、光纤滑环、双芯双向光模块、双芯单向光模块将信号传送至FPGA 模块。其次,FPGA 模块的作用是进行信号的编码处理,以提高通信能力。再次,激光器调制驱动的作用是将光数字信号加载到传输激光的载波上。而光功率放大器的作用则是将激光信号的功率进行放大,使接收一侧能收到足够强的激光信号。此外,探测信号放大处理器的作用是将激光信号转换为电信号,并对弱小电信号进行放大处理,以便后续处理电路解调信号[4] 。
3.2伺服稳定单元的基本原理
从设计上来看,伺服稳定单元是采用惯性导航(高精度)器件作为闭环控制电路的误差传感器,其控制系统的工作原理如图4 所示。
系统采用稳定回路陀螺仪作为高精度惯性跟踪元器件,它利用俯仰角误差通过内部电路产生相应正负极和线性成比例的电压差,该误差电压通过对应的控制器在直流电机轴上产生作用,即稳定力矩,确保系统在惯性空间上的稳定性。
伺服反馈控制电路由惯导组件及配件形成控制环,并通过输入电信号与角度位置信号比较产生偏差值,该偏压电压量作为位置环路输入控制电机的运动信号,从而实现平台稳定、精确运动的目标。
3.3北斗定位扫描捕获跟踪单元的基本原理
PAT 系统由初始定位系统、扫描系统、粗跟踪系统、精跟踪系统三部分组成。
3.3.1初始定位及扫描、捕获
由于车载激光通信系统的通信距离远,因此不宜采用望远镜对光学天线进行对准,而应获取自动定位、互通定位信息,并采用自动扫描、捕获的方式使两端天线相互聚焦对准。如果扫描的不确定区域太大会影响系统的捕获时间,造成通信保障不及时。因此,系统在进行扫描之前应提供相对准确的对准位置信息,以减小不确定扫描区域,从而缩短两端天线的聚焦对准时间。
根据战时电磁环境的复杂程度,初步考虑采用“北斗定位+小区域扫描、捕获”方案。该方案利用北斗设备的锁星定位技术,为对端提供极其准确的位置信息,从而计算出无线激光天线的夹角,进而通过伺服进行扫描对准。该方案大大降低了系统的扫描、聚焦对准时间。
3.3.2自动跟踪技术
自动跟踪系统可以对粗略对准后的无线激光天线接收到的激光信号进行探測,实现在大视角区域内捕获对方方位的目标,并对对方位置进行粗跟踪,然后通过自身调整使得目标控制在高精度跟踪范围内。该方式可以实现通信过程中始终保持精确对准。精跟踪工作原理如图5所示。
目前,国内的光电探测器主要有四象限探测器件(QD)及电荷耦合器件(CCD)。而QD 的位置探测精度较高,且可以使系统获得极高的跟踪精度,从而提高系统的稳定性和通信的可靠性。CCD 的探测灵敏度很高,系统可以获得相对较高的捕获概率和轨迹跟踪概率[5] 。本方案采用的是CCD 探测粗跟踪与四象限探测精跟踪相结合的方式。
3.4路由器的工作原理
路由器工作在网络层,其主要任务是接收来源于同一个网络接口的数据包,然后根据该数据包给出的地址建立网络;路由器存储单元生成一张路由表,系统根据数据包给出的地址和路由表决定转发的下一个目的地、路由路径和最终的目的地。
路由器物理层的一个端口接收数据后转发给链路层,链路层去掉封装后转发给网络层,网络层根据IP 地址判断是否需要送给本机———若需要送给本机则完成数据接收;若不需要送给本机则根据目的地与路由表将数据送给相应的端口;若都不是则丢弃报文。路由器的工作原理如图6 所示。
4仿真无线光传输中继系统的应用方式
仿真单组无线光传输中继系统的应用模式如图7所示。
仿真单组无线光传输中继系统的应用模式如图8所示。
通过华为中继仿真软件ensp 对以上两种应用场景进行仿真测试表明:中继方案切实可行。
5结论