
基于激光位移传感器的冲击波治疗仪输出能量检测系统的设计
2022-04-01 07:11顾加雨夏勋荣张超刘书言马靖武
中国医疗设备 2022年3期
顾加雨,夏勋荣,张超,刘书言,马靖武
1. 江苏省计量科学研究院 医学所, 江苏 南京 210023;2. 江苏省中医院 临床医学工程处, 江苏 南京 210029
引言
近些年来,体外冲击波作为一种兼具声、光、力学特性的机械波被越来越广泛地应用于骨科学、运动医学、康复医学等领域[1-4]。根据冲击波发生源的不同,体外冲击波按波源可分为液电式、压电式、电磁式和气压弹道式冲击波。气压弹道式体外冲击波仪(以下简称冲击波治疗仪)是利用压缩空气来驱动子弹体去撞击治疗头,使其产生脉冲式冲击波,分散能量,组织损伤小,对慢性软组织疼痛疗效明确,是目前相对而言最为可靠的一种利用冲击波进行治疗的手段[5-9]。随着科技的发展和社会的进步,冲击波治疗技术将在世界范围内获得更为广泛的应用。随着使用次数的增加,冲击波治疗仪的输出能量会受影响从而导致临床治疗效果不佳,所以准确评价冲击波治疗仪的输出能量显得至关重要[10]。
现有的冲击波治疗仪输出能量的测量是通过目测质量块在具有刻度的透明圆管内的上升高度来确定质量块运行的最大高度[11],然后通过公式计算输出能量。但是目测所得的高度存在较大的误差,从而影响输出能量的测量结果。本文设计一种冲击波治疗仪输出能量检测系统,提高质量块上升高度测量的准确性,实现对冲击波治疗仪输出能量的精准测量,保证设备的质量性能和治疗效果。
1 系统设计
1.1 系统设计技术原理
气压弹道式体外压力波治疗仪输出能量检测系统(以下简称系统)的设计根据能量守恒定律,将治疗仪输出能量转化为可测量出的重力势能:将气压弹道式体外冲击波治疗仪治疗头倒置安装于测量支架上,质量块静置于治疗头上;被测设备设置在最大能量输出的条件下,作用在质量块上的力推动质量块在测量管中进行垂直方向上的移动,通过激光位移传感器测量质量块移动位移,运用将输出压力波的能量转化为重力势能的方法测量设备的输出能量。其中测量管内壁应润滑减小与质量块的摩擦同时驱动被测设备应进行单次触发。
1.2 系统架构设计
检测系统主要由模拟电路和数字电路两部分组成,见图1。其中模拟部分由信号发生电路、增益调节电路、信号处理电路、电源电路等几个部分组成,数字部分由A/D转换电路、SDRAM数据缓存电路、数USB总线传输电路、基于FPGA的总线驱动电路、STM32作为主控微处理器电路等几个部分组成。控制器与计算机的数据通讯,将测量到的数据进行计算转换后发送给上位机。能量测量系统主要由位移传感器和FPGA测量芯片组成。 FPGA用于AD芯片的时序驱动和模数转换后采集数据的读取。
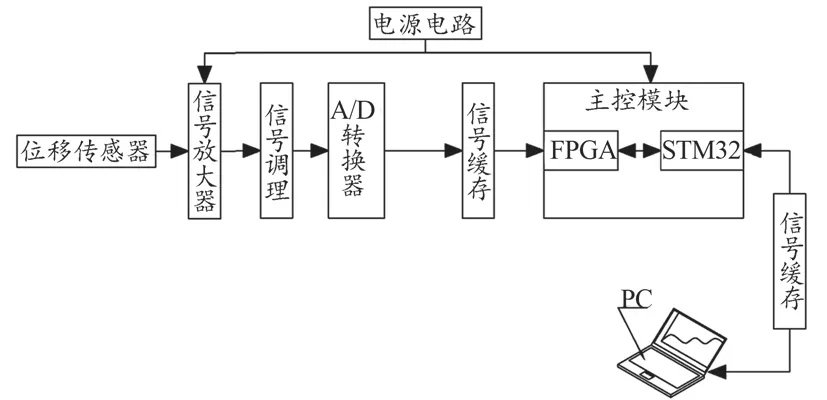
图1 系统总体架构框图
检测系统硬件结构主要由透明测试管,激光位移传感器,质量块,底座,导轨滑块组件,滑动支架,滚珠丝杠副,夹具,计算机,固定在底座上的两个安装支架以及X、Y轴滑台等组成。所述测试管可选用透明玻璃管,便于观察质量块的位置和运动过程,质量块的宽度略小于测试管的内径,以保证质量块能够自由移动而不受到测试管内壁的摩擦力。X、Y轴滑台上固定有夹具,用于夹持待测冲击波治疗仪治疗头;一个安装架上固定有导轨滑块组件,另一个安装架上固定有滚珠丝杠副,滚珠丝杠副上设有锁紧螺栓;滑动支架固定在滑块和丝母之间;测试管固定在滑动支架上端,测试管用于放置质量块,滑动支架上设有与测试管底部相通的测试孔,测试孔正对待检冲击波治疗仪治疗头;激光位移传感器固定在滑动支架上,用于检测质量块在冲击作用下的位移,并将数据传输至计算机。
1.3 位移测量模块设计
气压弹道式体外冲击波治疗仪治疗能量的测量是通过质量物块的重力势能来计算得出,故质量物块的上升高度(或位移量)的测量准确度至关重要。质量块的运动过程要确保为无约束状态,因此位移量测量应采用非接触的测量方式。目前非接触式测量方式主要为激光测量法,本例采用利用激光三角原理可以进行非接触测量位移的精密传感器,具有可以在狭小空间进行微小测量、反应速度快、精度和分辨率较高等特点,广泛应用于位置、位移、厚度、半径、形状、振动、距离等几何量的工业测量领域[12-13]。激光三角法是利用光线空间传播过程中的光学反射规律和相似三角形原理,由光源发出一束激光照射在待测物体平面上,通过反射最后在探测器上成像。当物体表面的位置发生改变时,其所成的像在探测器上也发生相应的位移,通过像移和实际位移之间的关系式,真实的物体位移从而可以由对像移的检测和计算得到[14-15]。本例中激光位移传感器从光路设计上采用斜射式,即投射光束和待测物体表面的法线成一个夹角。探测器主要接收镜面反射光,适用于表面粗糙度近于镜面的被测面,特点是分辨率高、体积大、测量范围广,故本例中选用线性电荷耦合器件(Charge Coupled Device,CCD)阵列探测器,当探测器采用CCD阵列时获取的信号是一幅图像,主要是运用图像处理软件和算法处理。与普通的图像处理不同的是,其处理需要对激光在CCD上投影点的位置做到亚像素级精度的估计。光源采用半导体激光器,也称为激光二极管,具有超小型、重量轻、效率高和发射激光高度连续性和可见性等优点。激光位移传感器的测量原理如图2所示,其中半导体激光器发射测量激光通过镜片聚焦到被测物体上,而被测质量块上表面反射光被镜片收集后投射到线性CCD阵列上,记录激光器发射和反射到CCD阵列上的时间,激光在空气中传输的速度为光速,可以测量到总的传输距离,发射和接收的角度是固定值,随后信号处理器通过三角函数计算CCD阵列上的光点位置得到距物体的距离。光电探测器件进行光电信号转化时,光斑越清晰则在对光电探测器件输出的电信号处理计算后所得到的光斑位置越精确。

图2 激光位移传感器测量原理示意图
1.4 控制电路设计
采用FPGA等可编程逻辑芯片代替常用的编解码及锁存器等数字逻辑芯片,可以有效减少电路板的面积,减少器件数量,提高系统运行效率。采用FPGA实现锁存模块和逻辑控制模块的功能。锁存模块的功能是在接到锁存使能信号后将数据锁存,等待后续电路处理。采集控制器在接收到数据采集中断后,发出数据采集地址编码到逻辑模块;逻辑控制模块通过编码地址选择相应的锁存模块,被选通的锁存模块将数据送到总线上,等待采集控制器读取数据。采集控模块负责整个系统的资源调度,负责控制逻辑模块读取锁存模块端口数据,并与上位机软件进行通信。采集控模块在接到数据采集中断后及时将数据读入,然后将结果输送到上位机进行坐标和速度解算。采集控制芯片须具备快速的响应中断能力,能够对触发信号进行快速的反应,并及时将数据锁存读取。此外,采集控制芯片还应该具有丰富的I/O接口,能够通过地址编码实现对大量锁存模块的控制,控制电路工作流程如图3所示。
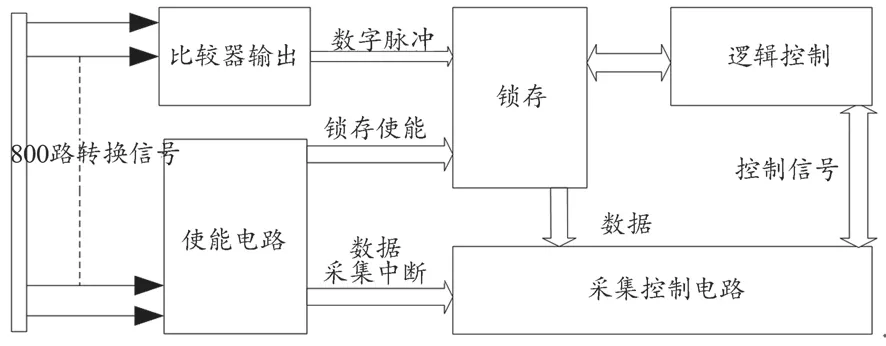
图3 锁存及控制电路工作流程图
1.5 系统软件设计
系统软件设计流程图如图4所示,系统软件是为实现硬件部分的能量测试而进行设计开发。输出能量测试程序设计主要分为四部分:质量输入、高度测试、算法运算以及结果生成。能量测试按钮表示测试开始,清零按钮表示清除开始的偏置量。质量需要手动填入,具体看所使用测试的质量块大小。高度峰值是仪器运行击打质量块所上升的最大高度,由软件自动读取;输出能量则是根据质量块的质量与高度峰值利用峰值算法计算并显示出来的。
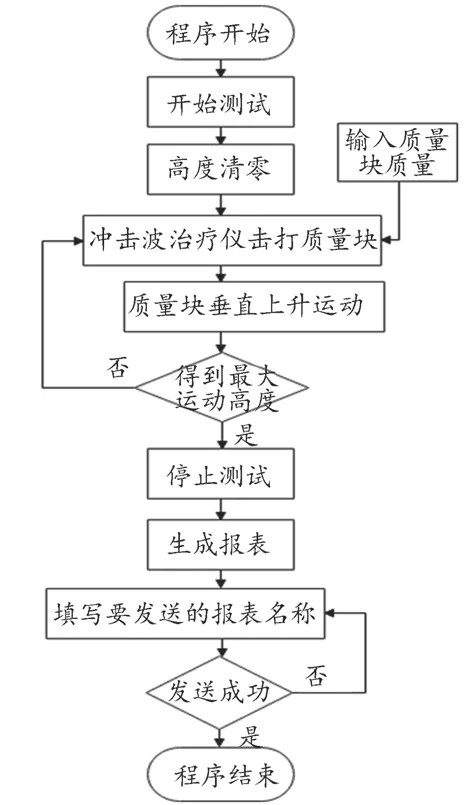
图4 系统软件设计流程图
2 结果
根据上文设计开发出气压弹道式体外压力波治疗仪输出能量检测系统,实物如图5所示,该系统已授权国家专利[16]。采用性能稳定的瑞士EMS公司的DolorClast型冲击波治疗仪作为测试样品,并在不同输出能量点下用本文设计的检测系统测量实际的能量示值。测试过程和方法参照YY 0950-2015《气压弹道式体外压力波治疗设备》,将冲击波治疗仪设置在不同能量输出的条件下,每个能量点使其单次释放冲击波10次,记录质量块的平均飞行高度,其中质量块质量为95 g,治疗仪冲击头直径为10 mm[17-20]。实验结果如表1所示,可以得到研发的检测系统测量的输出能量示值与被测冲击波治疗仪能量设置值的相对误差最大为-5.9%,而冲击波治疗仪的技术指标为±20%。另外根据YY 0950-2015《气压弹道式体外压力波治疗设备》中方法通过透明圆管上的位移刻度来观察砝码上升的高度,目测得出各个能量设置点所测量的上升高度值与开发的检测系统测量结果相一致,说明研发的检测系统检测输出能量准确,满足实际应用要求。

图5 系统实物图

表1 输出能量实验结果
3 讨论
现有的气压弹道式冲击波治疗仪的检测方法是基于行业标准YY 0950-2015《气压弹道式体外压力波治疗设备》进行的,其中关于输出能量的测试是通过带有刻度的透明圆管进行质量块最大冲击高度的测量,然后根据质量块质量和重力加速度计算出能量值。但是目测所测出的高度具有一定的误差,包括人员自身的误差、观测角度误差等,最终导致输出能量具有一定的误差,从而对气压弹道式体外压力波治疗设备的治疗效果造成一定的影响。本文设计的气压弹道式冲击波治疗仪的输出能量检测系统也是采用能量守恒定律将冲击能量转化为重力势能,但通过结合激光三角测量方法,自动检测质量体的位移,计算出能量,解决了在观测质量体上升高度时存在的误差问题,极大地提高了测量结果的准确性。同时针对不同治疗仪的冲击头大小、直径等都不相同,在加紧过程中就会出现不对中的现象,在底座上安装了X、Y轴滑台,保证测试时冲击头与测试管轴线在同一中心线上,能够测试更多类型的冲击波治疗仪。并通过导轨滑块组件和滚珠丝杠副实现了滑动支架位置的调节,使质量块能完全与探头接触,保证了测试的准确性。这些措施都进一步保证了检测系统实施的可靠性。
4 结论
本文设计了一种气压弹道式冲击波治疗仪的能量检测系统,采用高精度的激光位移传感器结合能量守恒定律,实现输出能量的准确测量,为冲击波治疗仪的临床应用提供了保障。并使用临床可靠的冲击波治疗仪作为测试样品,结果证明了本文设计的检测系统测量冲击波治疗仪输出能量的可靠性和准确性。该系统目前只能对冲击波治疗仪的输出能量和能量密度等参数进行测量,下一步研究方向是针对冲击波治疗仪的穿透深度、脉宽等参数完善检测系统。
猜你喜欢
中国药学药品知识仓库(2022年7期)2022-05-10
现代仪器与医疗(2022年1期)2022-04-19
兵器装备工程学报(2021年10期)2021-11-08
现代仪器与医疗(2021年4期)2021-11-05
昆明医科大学学报(2021年6期)2021-07-31
舰船科学技术(2021年5期)2021-07-03
舰船科学技术(2021年12期)2021-03-29
中国康复(2020年2期)2020-12-20
电子制作(2018年12期)2018-08-01
儿童故事画报·发现号趣味百科(2017年3期)2017-06-30
