
巡检机器人及智能终端在长嘉汇配电项目中的应用
2022-03-31 08:04凌励
科技创新导报 2022年21期
凌励
(重庆电专能创勘察设计有限公司 重庆 400034)
配电室由于高压放电等因素影响,易受到电磁的干扰,影响配电室的正常工作[1]。一般来说,传统配电室会采用测温技术对现场发热情况进行数据采集,但是受环境等因素的影响,使其应用范围受限。为最大化地提升配电网的安全性,降低现场危险事故的发生,可以运用智能巡检机器人开展巡检工作[2]。该技术可以实现对现场设备的红外测温,若温度出现异常,则有预警提示,能够在最大程度上规避异常事故的发生[3]。
1 长嘉汇F1组团开闭所及4幢配电房现状
10kV 长嘉汇F1 组团开闭所投运于2020年,规模为二进十二出,其中,进线柜2面,馈线柜12面,母线设备柜2面,站用变柜2面,分段隔离柜1面,分段断路器柜1面。电源一回10kV进线佛嘉线来至110kV大佛寺变电站,二回10kV进线光长一回来自110kV阳光一百变电站;出线为长嘉汇F1组团1幢公配、F1组团2-3幢公配和F1 组团4 幢公配供电。其中,10kV 长嘉汇F1组团4 幢配电房投运于2020年(见图1),10kV 户内高压开关柜9面,包括进线柜2面、母线设备柜2面、出线柜4 面、分段柜1 面;0.4kV 部分800kVA 变压器2 台,0.4kV 进线柜2 面,补偿柜2 面,馈线柜4 面,分段柜1面,0.4kV出线主要为F1组团4幢53层居民供电。
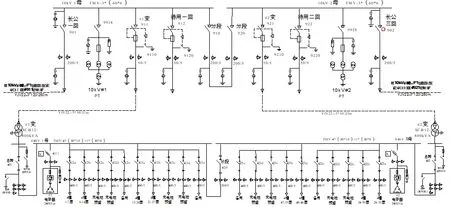
图1 10kV长嘉汇F1组团4栋公用配电房
2 巡检机器人工作原理
巡检机器人主要是由4个部分组成:提升总成、小摆总成、大摆总成和磁导引AGV(见图2)。前三者都各自拥有一个搭载平台,主要是采用(非)搭载接触式进行设备检测[4-6]。一般来说,提升总成会搭载专业的工业相机,利用伺服电机线性模组实现相机的上下移动,借助步进电机实现相机的摆动,可以让相机在不同位置和方向工作,从而实现对现场的监督。大摆总成利用放电检测装置实现对放电情况的检测。小摆总成主要利用工业相机完成数字与文字的识别,主要是利用伺服电机控制工业相机的位置。AGV 是机器人的外在移动载体,利用室内所铺设的磁条及RFID标签实现对AGV 的控制,从而达到对设备检测的目的,其中图3黑点标志为RFID标签。
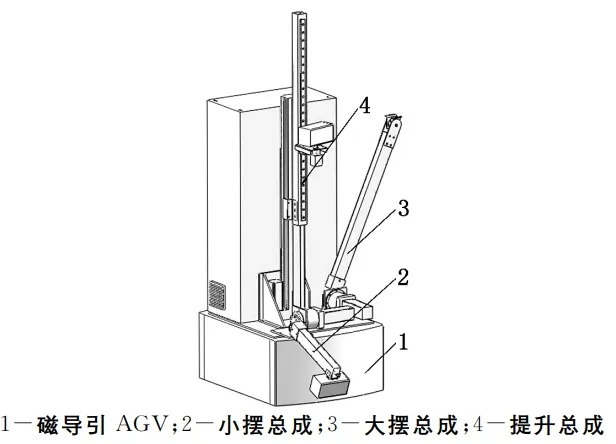
图2 巡检机器人结构示意图
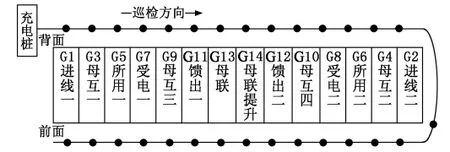
图3 R F ID 标签布局
3 融合终端工作原理
通常来说,融合终端包含机顶盒、路由模块和EOC3 个模块。配电房智能运维主要利用物联网技术实现对配电房的安全性进行有效的监督,从而提升供电网络的安全性,提高故障相应的响应速率,提高管理的安全性和规范性。综上所述,利用融合终端,可以实现对配电机房的管理和配置,该技术亦是目前在该领域亟待解决的问题和突破口。
4 实际应用分析
4.1 巡检机器人在长嘉汇F1组团开闭所的应用
室内巡检机器人主要是对长嘉汇F1组团开闭所电力设备的周边环境进行巡检,国内对巡检机器人的主要供应商有深圳朗驰和亿嘉和公司等,特别对亿嘉和来说,利用可见光相机、红外相机传感器等设备,实现对环境和设备状态的检测,从而实现对信息的全面监控。
4.1.1 室内智能巡检管理系统架构
感知层:通过机器人配合分布式环境检测设备,完成对开闭所现场设备运行及环境状态的采集。网络层:对来自现场检测设备状态参数及工作参数进行网络传输,将相关数据传输至上层信息管理层。应用层:对感知层上传的数据进行数据分析、存储和展示(图形化显示)。
该系统主要为了展示系统总体的信息,主要包括站所分布信息、站所信息和机器人信息。其以列表形式展现接入系统内所有站所的基本信息,根据获取的各站所运行状况,从设备、环境等维度对巡检数据进行综合统计与分析,指出需重点关注的站所,实现对运维管理的辅助指导。与此同时,主要对站所设备运行及环境状况信息进行查看和控制,实现智能巡检,对各站所历史巡检记录进行查询,以实现对系统的智能控制。
4.1.2 室内智能巡检机器人
智能巡检机器人主要包含6个功能:图像识别、局放检测、红外测温、环境监控、设备联动及安防报警。该巡检机器人主要是利用两驱轮式驱动、万向轮导向,实现4h 自主运行。利用激光扫描定位技术,结合SLAM方法,同时采用自主研发的激光扫描定位算法,能够提高构建离线地图的速度。机器人的水平面各方向上配置超声波避障传感器,可靠感知运行路径上的障碍物,并能够及时停止。在各部件运行定位方面,采用绝对值编码器配合电机双闭环控制算法,确保运行可靠性和定位准确性。基于定位手段,机器人会根据预先标定的检测位置,结合视觉伺服技术,按预设巡检方案进行自主、精确的巡检。运动控制利用轮式行走完成机器人的水平移动,实现室内的巡检工作;利用多节升降机构,完成对垂直检测面的覆盖,并结合云台转动,实现对设备检测的最优化点位标定;利用伸缩式检测臂,实现与设备的接触式检测。综上所述,这种智能巡检机器人在长嘉汇F1 组团开闭所的应用主要具备以下功能。
第一,具有带电在线的检测功能。其主要是利用对视频图像的识别、检测及联动控制系统等,对开闭所运行设备进行在线检测。借助可见光相机,可对现场设备进行精确的拍摄,对现场仪表、开关的状态位置和指示灯的情况进行有效记录,自动识别结果是否出现异常等情况,提高巡检的效率。对于局放监测机器人来说,主要是搭载局放传感器,利用超声波等对局放的带电情况进行检测,同时实现对当前数据的实时回传等,一旦检测出现场情况异常,立即对相关管理者进行有效提示,便于现场的维护,结合局放图谱库对现场进行实时检测。借助于该机器人,亦可实现对高压开关柜局放有效的监督和检测。
借助红外摄像仪,可实现对现场热现象进行检测和诊断(见图4),一旦设备检测温度异常时,可以及时报警,利用周期性的检测,实现信息的快速响应,将数据进行保存,为后期进行故障检测做好预测分析,利用单点检测数据以实现对现场信息的分析,并做好归档处理。

图4 对热现象进行检测以及诊断
第二,利用联动设备,实现对环境的检测,将该检测设备与机器人进行衔接,对现场数据进行统一化采集和梳理,尽可能满足智能化管理的要求。
第三,一旦现场异物侵入,可将门禁系统与巡检机器人对接,实现安防联动。
第四,采用多样化运行模式,实现对现场的有效巡检,一般来说分为全站、手动、定点及定制巡检。利用全站巡检模式,实现对现场的常规巡检,避免人工后台反复操作;利用手动巡检,当系统出现故障时,可以远程控制机器人;利用定点巡检,实现对单个或者多个电力柜定期定点的巡检;利用定制巡检模式,实现对某类电源的检测。
第五,利用温湿度检测、SF6监测告警器及门禁系统,对现场信息进行监控,即时将数据上传至远程监控中心,一旦现场出现异常情况,可以及时做好报警处理,保证现场温湿度在正常范围内,确保环境的适宜、安全。
4.2 智能融合终端在长嘉汇4幢配电房的应用
针对配套融合终端监测(见图5),配电房低压出线监测单元配置额定一次值800A 的母排式CT;低压分支箱出线监测单元3路,配置额定一次值400A的卡扣式CT,为RS485 接口,具有RS485&HPLC 通信转换功能;低压表箱出线监测单元配置额定一次值400A的卡扣式CT,为RS485 接口,具有RS485&HPLC 通信转换功能,无塑壳断路器楼层分线箱处配置1个。
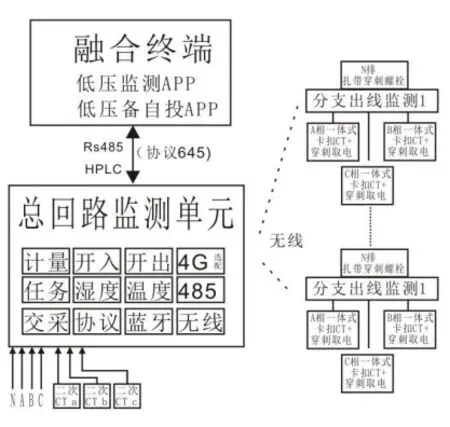
图5 智能融合终端在长嘉汇4 幢配电房设备架构
5 结语
在实际应用过程中,智能巡检机器人能够有效代替运维巡检人员实时监测开闭所内的高压开关柜,分析各开关柜的运行状态,检测开关柜的工作温度、异常振动等情况,及时发现故障风险,保证工作人员能够第一时间处理问题,将故障风险扼杀在摇篮中,充分满足群众的电力使用需求。为了更好地实现无人值守开闭所智能巡检机器人的使用有效性,工作人员优化设计运维管理机制,明确智能巡检机器人的运维流程、巡检模式与异常处理机制,以此维护机器人的运行过程,提升运维管理水平,推动配电站的智能化发展进程。
猜你喜欢
大科技(2023年38期)2023-09-10
今日农业(2021年20期)2022-01-12
中国交通信息化(2020年8期)2021-01-26
中国交通信息化(2019年5期)2019-08-30
机电信息(2018年9期)2018-03-29
科学与财富(2017年24期)2017-09-06
儿童故事画报·发现号趣味百科(2017年1期)2017-06-01
宝藏(2017年4期)2017-05-17
现代工业经济和信息化(2016年8期)2016-05-17
