抛光机器人在工程实训中的应用
2022-03-26 02:10朱义虎陈满意朱自文刘贤举
数字制造科学 2022年1期
朱义虎,陈满意,刘 波,朱自文,刘贤举
(1.武汉理工大学 机电工程学院,湖北 武汉 430070;2.武汉理工大学 工程实训中心,湖北 武汉 430070)
随着智能制造业的快速发展,机器人已经成为生产加工领域中不可或缺的设备。抛光机器人是现代工业机器人众多种类中的一种,用于代替传统人工进行产品的抛光,包括产品表面抛光、去毛刺、焊缝打磨等[1-3]。近年来随着我国抛光机器人技术水平的不断提高,在磨具加工、汽车零部件、航空航天、医疗器械等领域的应用越来越广泛。
根据国际机器人联合会(international federation of robotics, IFR)和中国机器人产业联盟(China robot industry alliance, CRIA)的统计,2020年,中国抛光机器人的销量约为2.65万台,同比增长25.35%。系统集成制造市场规模达27.2亿元,同比增长13.79%。预计未来两年内,抛光机器人市场规模将接近50亿元[4]。由此可见,抛光机器人在工程实际中的运用越来越重要和普遍。与此同时,对于相关人才的培养也越来越被重视。目前,国内各个高校都开设了与机器人应用相关的工程实训课程,旨在增加学生对机器人应用领域的深入了解以及培养解决工程实际问题的能力。
笔者结合抛光机器人在工程实训中的具体应用需求,重点研究抛光机器人离线编程软件的开发、轨迹规划等关键技术及应用。
1 抛光机器人控制系统开发
为了实现上位机控制机器人运动,以VC++6.0作为开发平台,基于MFC(microsoft foundation classes)框架开发了机器人抛光控制系统[5],建立了机器人与上位机之间的通信。通过将规划好的路径点编译成机器人运动控制指令并发送给控制器控制机器人关节电机进行运动。系统整体框架如图1所示。
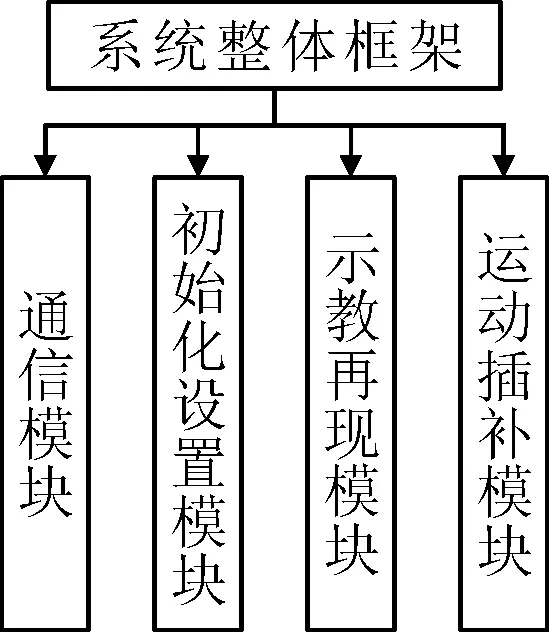
图1 系统整体框架结构图
1.1 系统通信方案
为了实现数据的准确传递,保证控制系统的正常运行,建立的系统通信方式如图2所示。从图2可知,计算机与机器人运动控制控制器之间采用可靠性高的TCP(transmission control protocol)[6]通信协议。
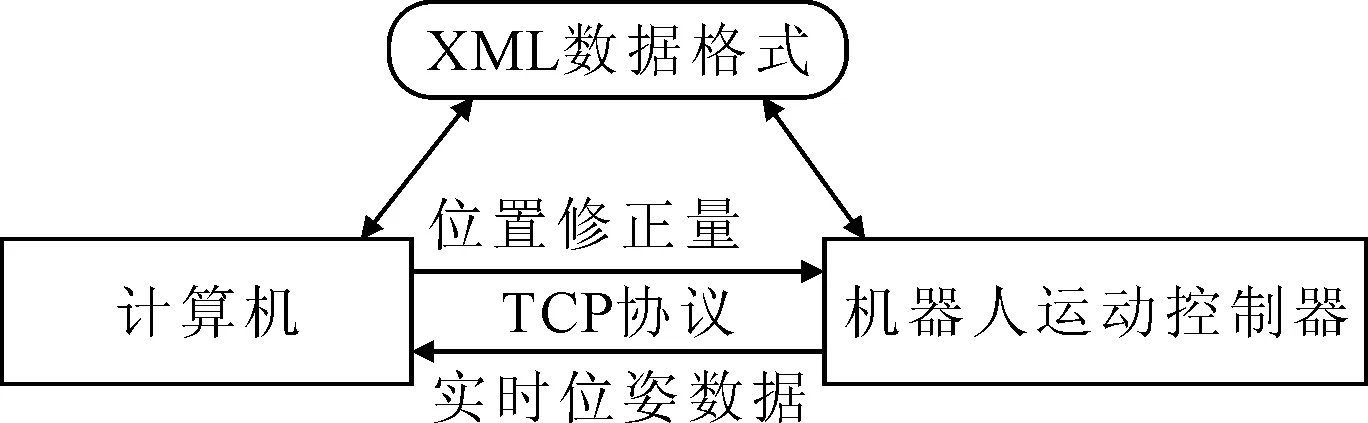
图2 系统通信方式
1.2 机器人初始化设置
在进行运动控制之前需要对机器人进行初始化设置。包括设定机器人原点、机器人基坐标设定、关节软限位设定。原点设定的目的是保证机器人结束工作后能够回到安全的停机点,以便更换刀具或调整工件位置。基坐标是机器人运动的基准。关节软限位是考虑到在实际生产加工过程中,由于工作环境复杂,机器人在运动过程中有些位置无法达到,因此需要对机器人角度进行限制,防止机器人与工作环境发生碰撞,造成人员受伤或设备损坏。
1.3 示教/再现运动控制
示教/再现功能的实现机理是通过控制程序点动按钮控制机器人执行一系列动作,其中记录这一流程中关键点,之后机器人重新按照关键点位置依序再现,重复完成。关键点位置记录越多,再现的运动轨迹与示教时机器人运行的轨迹越接近。所谓记录关键点就是记录当时位置的绝对编码器的值,以后再现时让机器人运动到该绝对位置即可。
1.4 运动过程插补
机器人在运动过程中需要对规划的路径进行插补,插补的方式包括直线插补、圆弧插补、样条插补。其中包含机器人运动学正逆解、运动轨迹控制算法等方面。
综上所述抛光机器人控制系统软件整体界面如图3所示。系统的工作流程如图4所示。

图3 抛光机器人控制系统软件界面
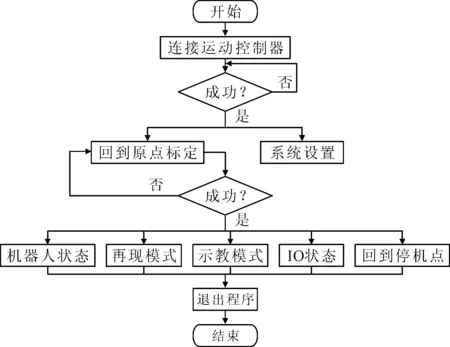
图4 抛光机器人的系统工作流程图
2 运动轨迹规划
抛光机器人作业流程如图5所示,其中测试程序是保证机器人工作路径是否正确的主要判断依据。将事先规划好的路径点编译成机器人可识别的程序,通过测试程序试运行,观察机器人前端装置是否与工件发生碰撞,从而保证抛光过程的安全性。

图5 抛光机器人作业流程图
本次实验的抛光工件属于典型的平面工件,抛光运行轨迹如图6所示。
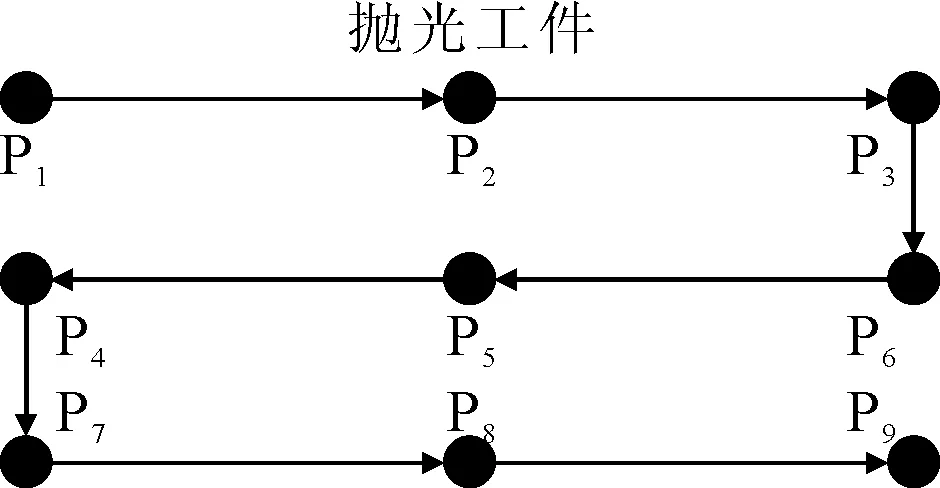
图6 抛光运行轨迹
以P1点为抛光起始点,其余各抛光点根据P1点计算。运行轨迹为P1→P2→P3→P4→P5→P6→P7→P8→P9。考虑录到抛光效果问题,轨迹规划好并编译成运行程序后应做3次运行,每次运行应对机器人的原点做校正处理,以防止在每一遍程序运行过程中因为机器人本身精度问题所造成的轨迹偏差[7-9]。
综上所述,机器人采用点对点的方式进行运动,在规划好的轨迹点之间需要进行直线插补运算以保证机器人可以按照给定的轨迹进行运动。
3 案例应用
实际工作场景如图7所示。

1-机器人本体;2-抛光工具(包括连接法兰和高速电主轴);3-抛光工件(典型平面工件装夹在台式虎钳上);4-电源控制柜;5-高速电主轴变频控制器;6-运动控制柜;7-上位机图7 实际工作场景布局图
工作过程如下:
(1)通过示教的方式找到规划好的路径点,并将每一个轨迹点编写成上位机软件可识别的编程语言,如表1所示。

表1 轨迹运行程序汇总表
(2)将编写好的程序进行编译,并试运行程序,检查机器人是否按照规划的轨迹运行,确保程序的安全性。
(3)观察结果。机器人工作状态如图8所示,最终抛光效果如图9所示。

图8 机器人工作状态

图9 抛光效果对比图
4 结论
结合抛光机器人在工程实训中的具体应用,介绍了抛光机器人离线编程软件的开发、轨迹规划等关键技术,并通过实训案例增加学生对抛光机器人系统开发以及相关知识的了解,同时培养学生解决工程实际问题的能力。
猜你喜欢
杭州电子科技大学学报(自然科学版)(2022年4期)2022-08-23
杭州电子科技大学学报(自然科学版)(2022年3期)2022-06-08
中学生数理化(高中版.高考数学)(2022年4期)2022-05-25
智能制造(2021年4期)2021-11-04
智慧健康(2021年33期)2021-03-16
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
计算机教育(2020年5期)2020-07-24
杭州电子科技大学学报(自然科学版)(2020年3期)2020-06-08
电子制作(2017年8期)2017-06-05