
履带式工程机械转向系统分析
2022-03-26 02:44:04徐成东
一重技术 2022年1期
徐成东
履带式工程机械行驶系统包括车架( 机架) 、悬架和行走装置。 车架采用整体骨架, 用来安装所有的总成和部件。 行走装置负责支持车体, 把从动力装置传到驱动轮上的转矩转变为车辆工作所需的驱动力[1]。 悬架是车架和行走装置之间互相传力的连接装置。 履带式工程机械的行走装置包含两条与机器纵轴线平行的履带, 所以它既无法实现偏转车轮转向[2、3], 也无法实现折腰转向[4、5], 只能通过两侧履带驱动链轮的转速差实现转向, 这种方式称为差速转向[6]。
1 转向原理分析与计算
履带行走装置主要由驱动链轮、 导向轮、 支重轮、 托带轮、 履带等组成( 见图1) 。 车辆行驶时, 驱动链轮接受传动系统传递过来的动力, 依靠履带板与地面之间稳固的附着力产生驱动力,进而传递给行走架和车架, 从而带动整车行走。图中vL代表左侧链轮的行走速度; vR代表右侧链轮的行走速度。 显然, 当两侧驱动链轮的行走速度相等时, 车辆成直线行驶状态。
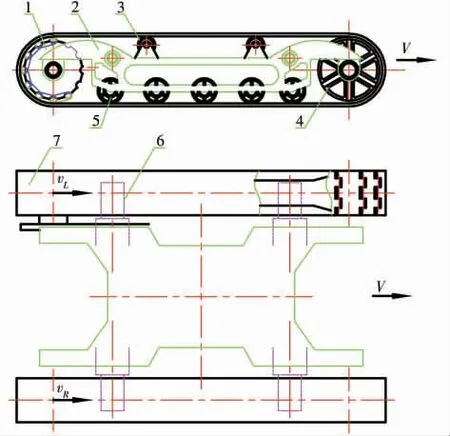
图1 履带式工程机械行走装置
当车辆需要转向时, 两侧的驱动链轮呈现出不等的速度( 见图2) 。 左、 右链轮沿着车辆的纵向中心线对称分布, 左链轮行走速度vL和右链轮行走速度vR两者互相平行, 且它们的方向垂直于左、右链轮的轴线。 由刚体的平面运动可知, 当vL和vR大小不等时, 车辆的速度瞬心必然位于两侧链轮的轴线与vL和vR矢量端点连线的交点上( 见图2(a))[7]。 如图所示, O 点即为车辆转向时的速度瞬心, 也就是转向中心, 设定两侧链轮的轮距为B, 则vL、 vR、 B 和转向半径R( 外侧驱动链轮与转向中心之间的距离) 存在如下数学关系:
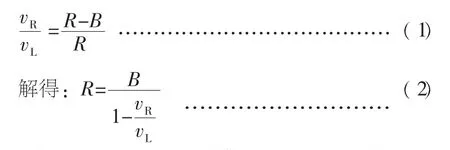
由式(2) 看出, 履带式工程机械转向半径的大小与左、 右驱动链轮速度vR、 vL的绝对大小无关, 而与两者的比值有关。 要改变转向半径, 只需要改变两侧速度的比值即可。 如果因为作业场地空间狭窄或其它原因需要在较小范围内转向时, 可以将右侧链轮制动, 仅仅依靠左侧链轮的速度实现转向, 转向中心(速度瞬心) O 即位于右侧链轮的几何中心。 由式(2) 可知, 转向半径R 的大小为两侧驱动链轮的轮距B( 见图2(b)) 。 履带式工程机械转向的另外一种情况就是原地转向( 见图2(c)), 此时转向中心( 速度瞬心) O 位于两侧驱动链轮的对称中心点上。 左、 右侧链轮的速度vR、vL大小相等, 方向相反, 两者的比值为负值。 由式(2) 可知, 原地转向时的转向半径R 为两侧驱动链轮的轮距B 的一半。 需要指出的是, 由于履带式行走装置的特殊结构, 原地转向时因履带侧滑等因素带来的转向阻力会大大增加, 能否实现原地转向受到行走装置多个运动参数的影响[8]。

图2 转向原理示意图
2 转向的操纵控制
目前, 履带式工程机械的传动系统主要采用机械传动、 液力机械传动、 液压传动三种形式。 机械传动系统主要由离合器、 变速器、 驱动桥等构成;液力机械传动系统主要由液力变矩器、 变速器、 驱动桥等构成。 而采用液压传动的工程机械称为全液压式工程机械。 对于采用机械传动和液力机械传动系统的履带式底盘, 为了转向方便, 设计驱动桥时均包含转向离合器, 通过操纵控制转向离合器可以实现转向。 对于全液压履带式工程机械, 通过操纵控制换向阀对行走马达进行调速, 进而调节左、 右驱动链轮的速度, 形成转速差, 转向得以实现。
2.1 机械传动(液力机械传动)
采用机械传动(液力机械传动) 时, 驱动桥采用机械传动( 见图3) 。 履带式推土机驱动桥及转向液压系统在执行直线行走时, 左、 右转向离合器( 常闭式) 处于接合状态, 来自变速箱的动力经过主减速器分别传给左、 右转向离合器, 再经过最终传动装置分别传给左、 右驱动链轮。 在此状态下,转向液压泵输出的油液经过左、 右转向控制阀的常态位, 再经由调压阀的旁油路进入变速箱进行强制润滑, 润滑压力由背压阀调节。

图3 履带式推土机转向操纵控制示意图
当推土机需要转向时, 驾驶员可通过操纵转向控制阀完成转向。 以右转向为例, 驾驶员操纵右转向控制阀的手柄, 控制阀切换到左工作位。 转向液压泵输出的压力油进入右转向离合器的接盘液压缸, 克服弹簧阻力, 推动活塞伸出, 主动鼓和从动鼓完全或者部分脱开, 右转向离合器处于完全脱离或者半联动状态。 此时, 右驱动链轮因为动力消失或者减小, 速度开始下降, 左驱动链轮则继续接受主减速器传递的动力。 左、 右驱动链轮因行走速度的差异迫使车架连同履带开始向右转向, 转向半径可由式(2) 求得。 当需要以较小的半径转向时,可在右转向离合器动力脱开后通过制动器将右驱动链轮制动, 此时左驱动链轮将以右驱动链轮为中心转动, 转向半径为两侧链轮的轮距B。 需要指出的是, 虽然转向离合器具有脱开动力的功能, 但却不能反向传递动力, 即两侧链轮不能反向转动, 因而无法实现原地转向。
2.2 液压传动
全液压履带式工程机械的转向通过液压传动实现。 典型的全液压履带式挖掘机传动系统由两台液压泵、 左、 右行走马达, 以及左、 右两侧的换向阀构成双泵双回路液压系统( 见图4)[9]。 液压泵的压力油经过换向阀进入行走马达, 行走马达输出转矩和转速, 通过减速器驱动链轮转动, 产生驱动力。 驾驶员操纵两侧的手动换向阀, 使左、 右行走马达等速同向转动, 左、 右驱动链轮等速前进或者后退, 挖掘机执行直线行走。 当需要右转向时, 驾驶员操纵右侧手动换向阀, 调节换向阀的开口度,调节进入右行走马达的流量[10], 降低其转速[11]。此时, 左侧手动换向阀仍处于较大开口度, 则左行走马达行走速度较快, 右行走马达行走速度较慢,使左、 右驱动链轮速度不等, 实现差速转向。 由于履带式挖掘机行走速度较慢且行走阻力较大, 当驾驶员将右侧手动换向阀置于中位时, 右行走马达停止转动[12], 左驱动链轮将围绕右驱动链轮驱动整车转向, 转向半径为两侧链轮的轮距B。 当挖掘机需要原地转向时, 驾驶员只需将两侧的手动换向阀置于相反的工作位且将开口度调节至最大值, 则左、 右行走马达等速反向转动, 左、 右驱动链轮速度大小相等, 方向相反, 使挖掘机实现原地转向,转向半径为两侧链轮轮距B 的一半。

图4 全液压履带式挖掘机传动系统
3 结 语
无论采用机械传动( 液力机械传动) , 还是采用全液压传动, 履带式工程机械均是通过两侧驱动链轮的转速差实现转向, 但两者的操纵控制方法存在差异, 转向工作过程也不相同, 由于转向半径取决于两侧驱动链轮速度之比, 要求驾驶员具有一定的工作经验。
猜你喜欢
水泵技术(2021年5期)2021-12-31 05:26:44
石油钻探技术(2020年3期)2020-08-24 07:28:02
湖北农机化(2020年9期)2020-01-08 07:40:51
汽车零部件(2018年11期)2018-12-08 06:24:22
制造技术与机床(2017年11期)2017-12-18 06:47:08
时代农机(2016年3期)2016-09-06 06:28:21
现代工业经济和信息化(2016年7期)2016-05-17 05:36:45
设备管理与维修(2016年7期)2016-04-23 06:51:42
汽车实用技术(2015年8期)2015-12-26 09:01:06
现代制造技术与装备(2015年4期)2015-12-23 10:20:18
