
Bioinspired polarized light compass in moonlit sky for heading determination based on probability density estimation
2022-03-25 04:29:06YutingYANGYnWANGLiGUOBoTIANJinYANGWnshuoLITihngCHEN
Chinese Journal of Aeronautics 2022年3期
Yuting YANG , Yn WANG ,b,c,*, Li GUO ,b,c, Bo TIAN , Jin YANG ,b,c,Wnshuo LI , Tihng CHEN
a School of Automation Science and Electrical Engineering, Beihang University, Beijing 100083, China
b Beijing Advanced Innovation Center for Big Data-Based Precision Medicine, School of Medicine and Engineering, Beihang University, Beijing 100083, China
c Key Laboratory of Big Data-Based Precision Medicine, Ministry of Industry and Information Technology, Beihang University, Beijing 100083, China
d Hangzhou Innovation Institute, Beihang University, Beijing 100083, China
e School of Cyber Science and Technology, Beihang University, Beijing 100083, China
KEYWORDS Nocturnal polarization;Moonlit sky;Angle of Polarization (AoP);Probability density estimation;Navigation
Abstract Bioinspired polarized skylight navigation,which can be used in unfamiliar territories,is an important alternative autonomous navigation technique in the absence of Global Navigation Satellite System(GNSS).However,the polarization pattern in night environment with noise effects and model uncertainties is a less explored area.Although several decades have passed since the first publication about the polarization of the moonlit night sky,the usefulness of nocturnal polarization navigation is only sporadic in previous researches.This study demonstrates that the nocturnal polarized light is capable of providing accurate and stable navigation information in dim light outdoor environment.Based on the statistical characteristics of Angle of Polarization(AoP)error,a probability density estimation method is proposed for heading determination.To illustrate the application potentials,the simulation and outdoor experiments are performed.Resultingly,the proposed method robustly models the distribution of AoP error and gives accurate heading estimation evaluated by Standard Deviation(STD)which is 0.32°in a clear night sky and 0.47°in a cloudy night sky.
1. Introduction
Fully autonomous outdoor navigation, which can be used in unfamiliar territories, such as ocean, desert, and after natural disasters, is one of the fundamental challenges for exploring unknown places. The Global Navigation Satellite System(GNSS) is an important tool for navigation in the outdoor environment.However, GNSS signal is vulnerable to interference by nature or human.To improve the reliability and accuracy of autonomous outdoor navigation, a number of studies demonstrated the ability of polarization navigation generated by solar skylight.
Scattering of light in the sky forms a stable polarized pattern which can be used in navigation.Inspired by animals’behavior of taking advantage of polarization to navigate,polarized light compass that does not rely on external signals has become a very important alternative navigation technique in the sunlit sky.More recently,biological researches indicated that dung beetles are able to navigate polarimetrically in moonlit nights.They routinely look skyward to find their way using the million times dimmer polarization patterns of the moonlit sky. These beetles can travel in a straight line in the process of rolling a dung ball to a place without interference from other beetles using the celestial cue as a compass.These precedents inspire us the novel method by utilizing the celestial polarization of moonlit sky in the orientation task.However, the polarization pattern in the conditions of low light is a less explored area with noise effects and model uncertainties. Although several decades have passed since the dung beetles are found able to navigate polarimetrically in moonlit nights,the usefulness of nocturnal polarization orientation is only sporadically presented in previous studies.
Celestial polarization patterns have been studied in various environment including cloudy,smoky,and foggyconditions,and also in underwater environment.Besides, the studies on diurnal polarization navigation have also been performed widely.However, the studies mentioned above focus on the polarization patterns in the daytime. The researches on polarized light navigation at night received less attention. Polarization patterns of the moonlit clear night sky have been measured by Ga´l et al.It was confirmed that the patterns were practically identical if the elevation of the moon was the same as that of the sun. After that, lunar skylight polarization signals polluted by urban lighting were studied by Kyba et al.The results illustrated that urban skyglow diminished the natural lunar polarization signal and the Degree of Polarization (DoP) reduced as the moon rised, due to the misalignment of Angle of Polarization (AoP) between the skyglow and scattered moonlight. In addition, an effect of lunar phase on the DoP and AoP of celestial polarization patterns was investigated, showing that smaller lunar illuminated fractions corresponded to lower DoP.These studies provide us with an effective basis for using nocturnal polarized light in navigation.However,the results mentioned above suggest that compared to polarization patterns in the daytime,those patterns generated by lunar skylight are very complicated.The low-light environments at night present a challenge for the detection of polarization patterns which are often corrupted by noise during the process of acquisition or transmission. The application of nocturnal polarization signal as an effective navigation technology is still facing many challenges.Basically, how to extract navigation information accurately and robustly from celestial polarization patterns generated by lunar skylight for autonomous navigation system is an urgent problem to be solved.
Although various solar azimuth determination methods have been implemented in diurnal polarized skylight navigation,few methods have been developed so far,which take into consideration the characteristics in nocturnal polarization navigation. Hough Transform (HT) is commonly used in obtaining azimuth reference from polarized skylight in the daytime.An orientation algorithm using the solar meridian as an azimuth reference based on HT was proposed and successfully applied in daytime navigation task.In clear night sky,a compass information calculation method based on Pulse Coupled Neutral Network (PCNN) was proposed, combining PCNN filters to remove the effects of noise.Seven nocturnal images in clear sky with a full moon were taken to illustrate the effectiveness of the algorithm. However, the studies on nocturnal polarization orientation were still sporadic in previous polarized skylight navigation. Especially, it is still an opening yet challenging problem to investigate the application potentials of nocturnal polarized light to providing accurate and stable navigation information in dim light outdoor environment.
Generally,the celestial polarization patterns in the clear sky can be described by Rayleigh scattering theory as the scale of scattering particles is far less than the wavelength of light.However, considering the scattering particles with large scale in the atmosphere, such as aerosol particles, Mie scattering is introduced to describe the effects of these scattering particles with large scale.Besides the scale of scattering particles,atmospheric perturbations such as multiple scattering and ground reflection also have effects on the celestial polarization.Although some polarized radiative transfer studies have taken the influence of those factors into consideration,it is still hard to calculate the influence on celestial polarization patterns accurately. However, some studies have demonstrated that the actual polarization patterns can be approximated by single-scattering Rayleigh model to provide the effective navigation information by performing outdoor experiments in realistic scenario.The Rayleigh scattering model is utilized in polarized skylight navigation area widely.According to Rayleigh scattering theory, the symmetry of polarization patterns can be utilized as an identifiable characteristic for indicating navigation information. Based on the symmetry of AoP map of skylight, several methods have been developed for identifying the solar meridian to orient.However, the celestial polarization patterns in moonlit sky were not considered in these studies.
In this paper, based on the symmetry of polarization patterns, an algorithm to estimate the heading angle by utilizing the statistical characteristics of moonlit skylight polarization is developed.In the algorithm,the AoP error is modelled with Probability Density Function(PDF)and the installation error between the polarity direction of 0° polarizer and the 0°reference direction of polarization sensor is taken into consideration. We demonstrate that the nocturnal polarized light is capable of providing accurate and stable navigation information in dim light outdoor environment. Lunar skylight polarization varies as a function of lunar position which can be mathematically encoded in the resulting celestial polarization patterns and can be transformed into a stable and accurate compass signal to drive precise orientation behavior.To assess the application potentials, the simulation and outdoor experiments are performed, which demonstrate that our method has general implications for the nocturnal polarized skylight navigation. The method proposed in this paper relies on the nocturnal polarization compass which is immune to electromagnetic interference and can be used in GNSS denied outdoor environments.The research is particularly suitable for outdoor autonomous navigation system without the input of external signal.
The remainder of this paper is organized as follows. First,the algorithm principle and derivation process are introduced.Then, the experimental settings are briefly introduced and the experimental results are shown. Finally, some conclusions are drawn.
2. Method
2.1. Overview
The low-light environments at night bring a challenge for the detection of polarization patterns.On the other hand,the deviation of the polarity direction of 0°polarizer will cause a large constant error of heading angle estimation. Ideally, the polarity direction of 0° polarizer is consistent with the 0° reference direction of polarization sensor.However, due to the error in the manufacturing and installation process, there usually exists a misalignment between these two directions,which further causes a deviation in heading angle estimation.This deviation was previously calibrated by a Global Position System(GPS) system in Ref. 38, but the calibration method is based on a point source polarization sensor which is used in the daytime.Hence,the installation error is needed to be considered in the calculation of nocturnal polarization navigation information based on the imaging polarimeter. In this section, this error is taken into account in the AoP error calculation model and is estimated without the aid of GPS system.
We have taken an information processing approach: given polarization patterns gathered from the realistic sky,we examine whether these AoP error data provide enough information for a heading angle estimation based on the statistics of these data. We start with a scattering model of skylight, which is used to calculate AoP error data with additional information including predicted lunar azimuth and installation error.Then,we estimate the statistical characteristics of AoP error to generate estimated parameters by defining a variety of PDFs that will reconstruct the error data.As the relationship between the PDFs and lunar azimuth is yet uncertain, we then establish a set of objective functions which are used as input to heading angle calculation based on the estimated parameters of PDFs to generate installation error estimation and compass output.Finally,the heading angle is calculated by combining an internal clock and ephemeris function. Each of these steps is described in detail below.
2.2. Calculation of AoP error
Atmospheric scattering polarizes incident moonlight so that a stable navigation compass is encoded in polarized skylight.To accomplish navigation tasks, we need to take an effectively computational approach to generate polarization information output from the low-level light environment,by combining the statistical characteristics of polarization patterns. In this section, we start with a basic computation of AoP, which is used as input of AoP error calculation. We then compensate the installation error to recover an estimate of AoP error. A detailed description is illustrated below.
It has been shown that the incident light can be deduced by intensity value measured by polarized sensor with Mueller matrix.The polarized skylight can be described by Stokes parameter S=[I;Q;U;V] as
From Eq. (2), the polarization state I;Q;Ucan be obtained by a measured polarization image sequence with different angles of polarizer, which are shown as

where α denotes the angle between 0° reference direction of polarization sensor and the local meridian of celestial observation point.
The above calculation of AoP assumes that the polarity direction of 0° polarizer is aligned with the 0° reference direction of polarization sensor.As the realistic polarity direction of 0° polarizer deviates from the sensor, the predictions of the above equation become less and less accurate. To compensate for this error, we add φwhich represents the difference between the polarity direction of 0°polarizer and the 0° reference direction of polarization sensor into Eq. (4). The AoP from the previous equation then changes to


where g is the gradient of intensity image gray scale and gis a gray threshold. The threshold is set to distinguish the effect of moonlight reducing the impact of data with large errors on the results.
2.3. Estimator evaluation
From the statistical view point, the knowledge of the distribution properties of AoP error data is the key to understanding atmospheric scattering which gives rise to the measured celestial polarization patterns.If the PDF of AoP error is perfectly known, any possible issue concerning probabilities associated with the polarization patterns could be dealt with. AoP errors are regarded as samples drawn from certain PDF. It is therefore of great importance to provide an accurate estimate of such a PDF.
The samples of AoP error data are assumed to be independent and identically distributed. Under this assumption, AoP error distribution model can be obtained by using these samples integrated with parametric PDF estimation method. The function F(σ;Θ)which contains the structure of probability distribution along AoP error is employed to represent the statistical characteristics. In this paper, three types of PDF including Student-T (ST), Gaussian Model (GM), and Gaussian Mixture Model (GMM) are adopted, where GM is the most widely used due to its low computational complexity and elegant mathematical formation, ST distribution has the heavy-tail property and GMM is represented as a weighted sum of some Gaussian distribution components. The histograms of AoP error data and performance of estimator are shown in Fig. 1. To show the PDFs clearly, the peak value of ST is ignored, which is 0.275. Table 1 lists the PDFs.

Fig. 1 Histograms of AoP error and probability density using PDFs including ST, GM and GMM at φ0 =14˚and βpredSPE =21˚.
2.4. Azimuth determination
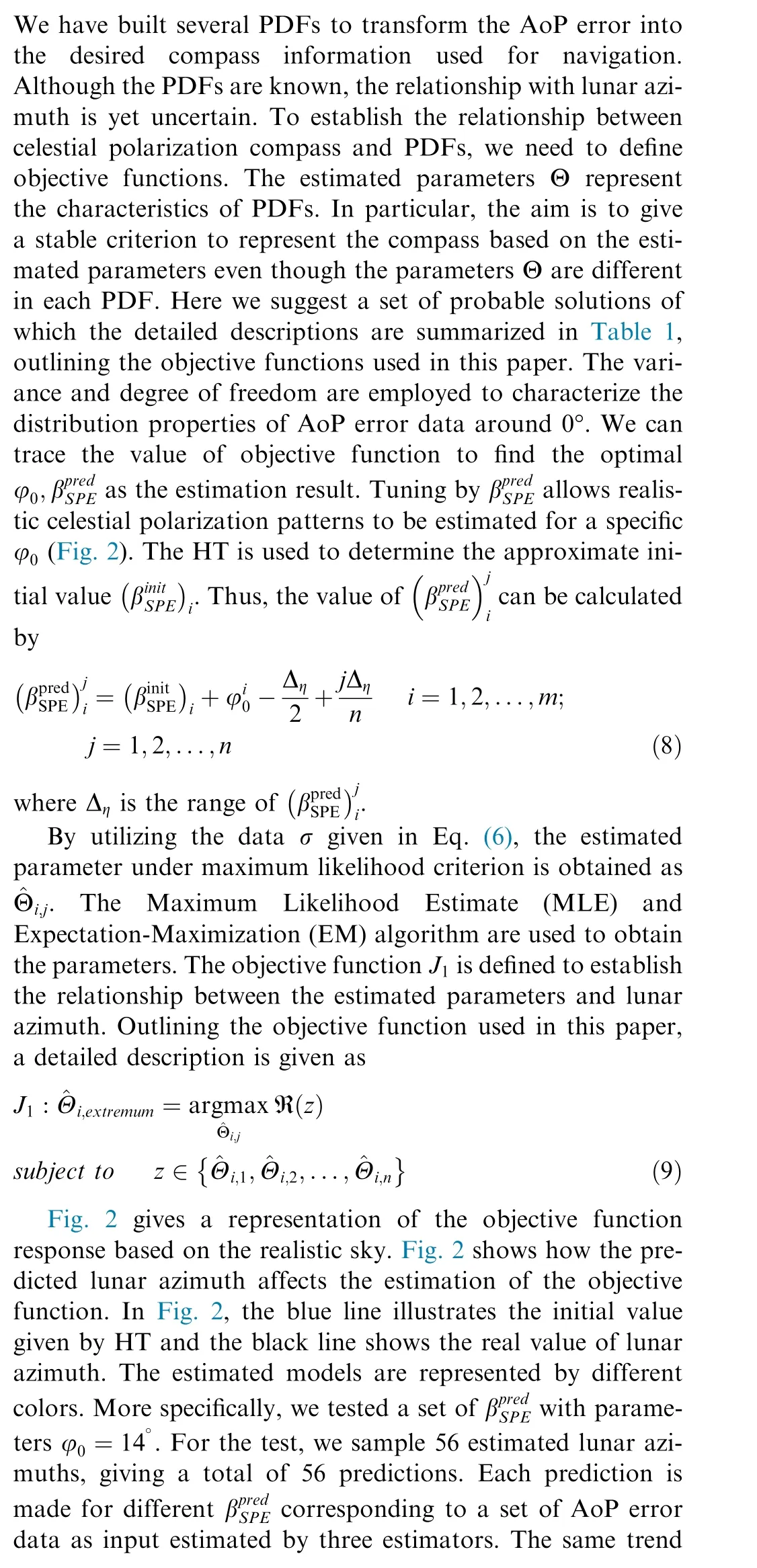

Table 1 Probability density functions and objective functions of three distributions.

Fig. 2 Objective function response of a series of predicted lunar azimuths.

2.5. Error compensation
For a polarization sensor, the accuracy of the calibration of polarity direction of 0° polarizer affects the preciseness of celestial compass.This is defined by the error in manufacturing and installation process which is inevitable. As a result, the accuracy of the celestial polarization compass is dependent on the knowledge of this error. This has been previously calibrated by combining a GPS system using the values measured in outdoor environments prior to experiment.However, a high-precision basis reference is needed to calibrate the compass and a series of outdoor experiments are needed to be performed before the sensor can be used. This section estimates the values of φto compensate for constant error in the results of heading angle calculations during the experiment without the assistance of additional system.

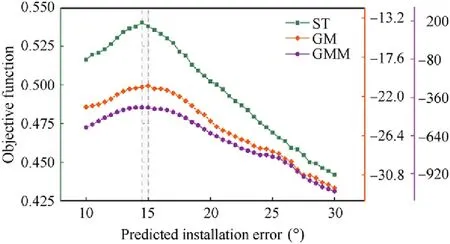
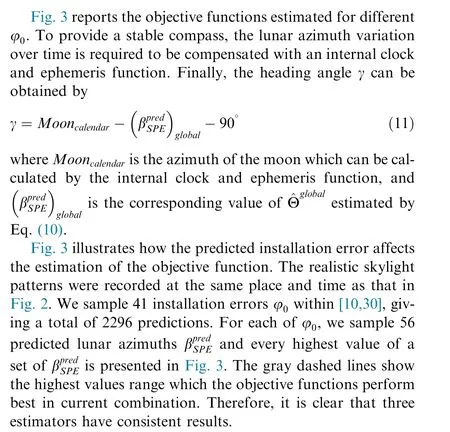
Fig. 3 Objective function response for a series of predicted installation errors based on realistic sky.
We then test the proposed method in a simulated sky.Based on the single-scattering Rayleigh model, a virtual environment is constructed. Given the lunar position and a set of celestial points, the simulation can generate the AoP for these points observed.The position of moon at specific locations can be obtained by tuning georeferenced input parameters. The simulation results are showed in Fig. 4.
Remark 1. To demonstrate the effect of φand βon our model, the estimated objective functions corresponding to a global optimization process are illustrated in Fig. 4. Note that
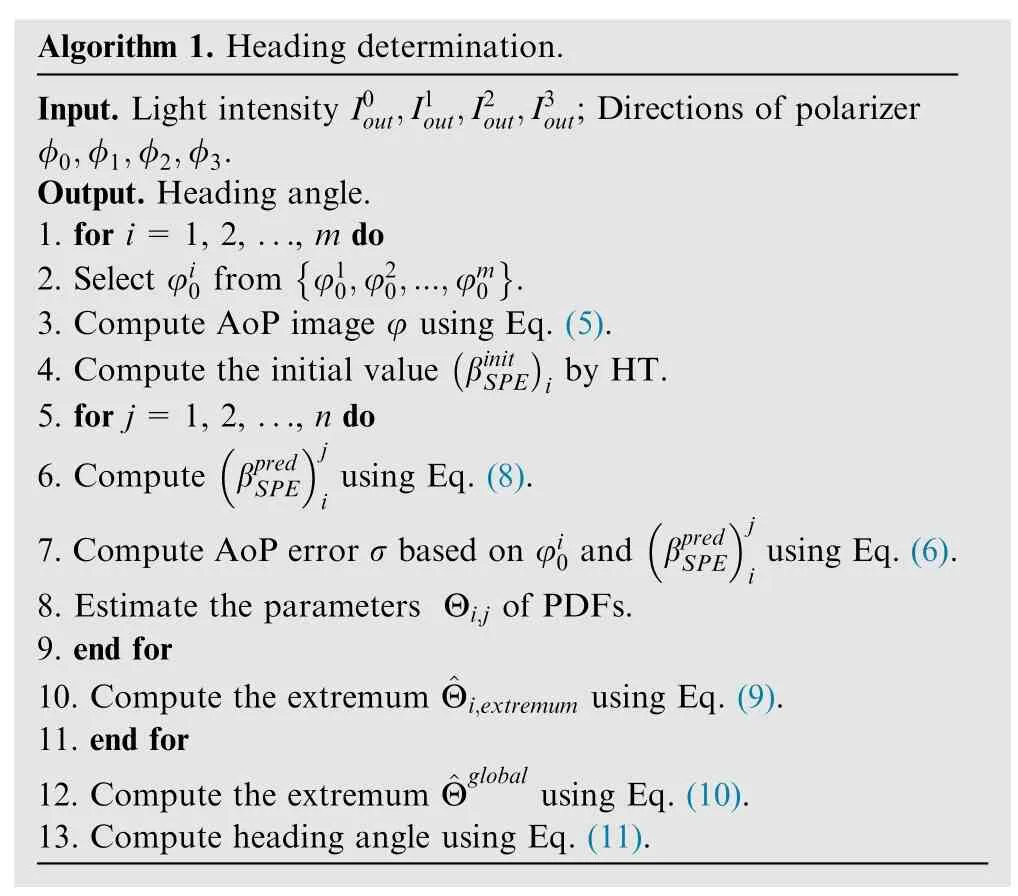
According to the algorithm mentioned above, the relationship between heading angle and celestial polarization patterns is established. For clarity, the pseudo code is presented in Algorithm 1.
?
3. Experiment
3.1. Experimental settings
The lunar skylight polarization at night is far dimmer than that around the sun in the daytime,which makes photopolarimetry challenging. To demonstrate the performance of the proposed estimation method in a more realistic scenario, we integrated the automatic polarization acquisition system to test the compass accuracy.
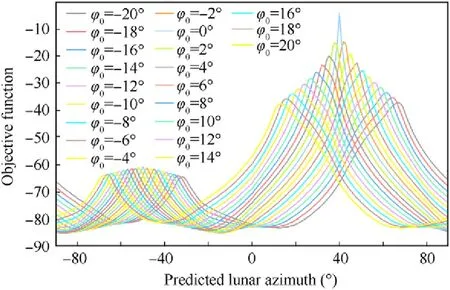
Fig. 4 Estimated objective functions based on simulated sky by using Gaussian Model (GM).
As the abundant information from the polarization-lightvector field can be obtained by imaging polarimeter to improve anti-interference performance, a time-sharing imaging polarimeter is set up, which is depicted in Fig. 5. The imaging polarimeter is composed of a deep cooling camera(MicroLine ML1001) which is sensitive to low light level imaging with a fish-eye lens(Sigma 8 mm/F3.5 EX DG FISHEYE)and a filter wheel (CFW4-5). The fish eye lens can provide a 180° view of nocturnal polarization images. The computer can be used to control the imaging polarimetry system and receive GPS data.The dual-antenna GPS(HT-GGB017IA/UB280 OEM)system is used as a heading reference. Indoor calibration of the imaging polarimetry system has been performed previously.During the outdoor experiments,all instruments are arranged horizontally so that the optical axis of camera is parallel to the connection between the zenith and the observer.The local time is used to indicate the experimental time.
3.2. Experimental results
3.2.1. Heading angle estimation in a clear night
An experimental exercise was undertaken to verify the results of the proposed algorithm in real-world imagery. The experiment was performed at the Xinglong Observatory of the National Astronomical Observatories (Latitude: 402349N;Longitude: 1173448E), Chinese Academy of Sciences, on 15 October 2019. In the following content of this paper, three distributions mentioned above are evaluated respectively by comparing the stability of estimated heading angle and installation error.

Fig. 5 Photograph of instrument.
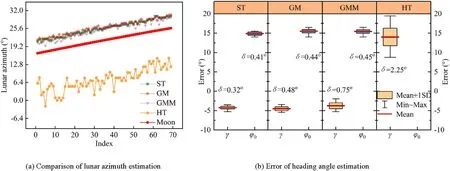
Fig. 6 Accuracy of nocturnal celestial compass in a clear night.
Fig.6 reports the results of heading estimation.Performance evaluations are compared for the purpose of heading angle determination.The results of predicted lunar azimuth in sensor coordinate system are shown in Fig.6(a).The red mark shows the real lunar azimuth in sensor coordinate system which is determined by a GPS reference system combined with ephemeris function.The abscissa in Fig.6(a)indicates the serial number of the image sequence. We tested the performance of nocturnal skylight compass for a long time about 35 min, and hence the stability of lunar skylight polarization compass can be assessed.The deviation of heading angle estimation including maximum,minimum, mean and Standard Deviation (STD) are shown in Fig. 6(b). We show the deviation as the mean angular error plus/minus the STD (Fig. 6(b)). The results of heading angle estimation are summarized in Table 2.
Remark 2. GPS system, which does not work in realistic heading determination, is employed as a heading reference to compare the estimated results.
Besides, the proposed algorithm based on the probability density estimation reduces the constant error compared to HT. This is because the proposed method takes the influence of installation error into account when calculating the AoP error as shown in Eq. (5). However, the HT is based on Eq.(4), which does not consider the influence of this error on the polarization mode.
Among the three probability distributions,the ST estimator consistently produces the smallest extreme fluctuation on the estimations of both heading angle and installation error. It can be seen from Fig. 6 and Table 2 that the ST estimator has the lowest STD value and the smallest difference between maximum and minimum. This illustrates that the stability of using ST distribution to estimate the AoP error is better than other distributions. The reason for that probably lies in that ST distribution has the heavy-tail property compared with the Gaussian PDF and thus contributes to providing a robust estimator with outlier resilience. Besides, due to the more parameters involved in GMM, it is indeed difficult to accurately express the relationship between the parameters and the objective function to establish a reliable heading angle estimation.Hence,the results in Fig.6 and Table 2 clearly demonstrate that the ST estimator, compared to GM and GMM,serves as a more suitable candidate for modeling the celestial polarization patterns of the moonlit clear night sky.

Table 2 Statistics for estimation error in a clear night.

Fig. 7 Accuracy of nocturnal celestial compass in a cloudy night.

Table 3 Statistics for estimation error in a cloudy night.
3.2.2. Heading angle estimation in a cloudy night
To further demonstrate the effectiveness in other weather conditions, we validate the proposed method in a cloudy night to evaluate the robustness of the compass in the disturbance environment. The experiments were performed in Changping district, Beijing (Latitude: 40739’N; Longitude: 1161753’E),on 11 November 2019. The results are shown in Fig. 7. The estimated accuracy is summarized in Table 3.
The influence of the cloudy sky on the polarization compass is shown in Fig. 7(b) and (c). The calculated results of lunar azimuth are shown in Fig. 7(b). The statistical property of the estimated results is shown in Fig. 7(c), which shows the overall performance in heading angle determination task.The estimated results of different PDFs are compensated for installation error corresponding to the results in clear night sky, respectively.
The results shown in Fig. 7 illustrate that the proposed method is much more robust than HT in the cloudy sky conditions. However, compared to the estimated results in the clear night sky, the accuracy of heading angle estimation decreases. Table 3 illustrates that the estimation accuracy is still much better than HT whether in max-min or STD results.More specifically,the largest percentage error improvement of STD is up to 88.07% (ST) in comparison to the algorithm based on HT. The smallest percentage error improvement is 78.43% compared to HT. The accuracy improvement is greater than the estimation results in the clear night sky,which illustrates that the estimation accuracy of HT decreases faster as the weather conditions get worse.
Among several PDFs in the proposed method,ST achieves the best performance owing to its smallest STD and difference of max and min.The results demonstrate the robustness of ST.This conclusion is consistent with that in the clear night sky.
As we described above, we test the performance of the proposed method in both clear night sky and cloudy night sky. By estimating the polarization signal in the cloudy night sky, we can evaluate the robustness of the compass in disturbance environment. All these results demonstrate the validity and superiority of the proposed heading angle determination method. Besides, the experimental results also show that the nocturnal polarization information can be applied as a reliable navigation method for determining heading angle.
4. Conclusions
In this paper,by measuring the moonlit polarized sky,we have demonstrated that the nocturnal polarized light is capable of providing accurate and stable navigation information in dim light outdoor environment. A heading angle estimation algorithm based on statistical characteristics of AoP has been proposed, which could be applied to lunar skylight polarization.The algorithm has been validated in simulation. Furthermore,the outdoor experiments performed in both clear night and cloudy night have demonstrated the effectiveness of the proposed algorithm. As a result, the PDFs utilized in this paper all have estimated heading angle accurately. Especially, the ST distribution has provided a better result for modeling AoP error compared with other distributions.The results have confirmed that the accuracy of the algorithm for estimating heading angle is 0.32° (STD) in the clear night sky and 0.47°(STD) in the cloudy night sky.
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
This project was supported by National Natural Science Foundation of China (Nos. 61627810, 61751302, 61833013 and 61973012).