
Development of amphibious biomimetic robots
2022-03-23 00:57XiangjuanBAIJianzhongSHANGZirongLUOTaoJIANGQianYIN
Xiang-juan BAI,Jian-zhong SHANG,Zi-rong LUO,Tao JIANG,Qian YIN
Department of Intelligent Machinery and Instrument,National University of Defense Technology,Changsha 410073,China
Abstract:Amphibious robots are becoming increasingly important for civilian,scientific,and environmental missions.They are widely used in disaster rescue,ecosystem monitoring,and entertainment.However,some have two different locomotion systems that need to be changed manually to fulfill both swimming in the water and moving on land,which may reduce their efficiency and reliability.Applying bioinspiration and biomimetics,many recently developed amphibious robots can undertake various tasks in complex amphibious environments with high mobility,flexibility,and energy efficiency.This review overviews the latest developments in amphibious robots,emphasizing biomimetic design concepts,backbone driving mechanisms,and typical applications.The performance indices of amphibious robots mimicking 13 different natural sources are compared,based on 10 different propulsion principles/modes,travel speed,working efficiency,maneuverability,and stability.Finally,the current challenges and perspectives of amphibious bio-inspired robots are discussed.This article summarizes the current types of amphibious robots and their movement and behavior solutions.The design concepts and operating mechanisms of amphibious robots reviewed here can be readily applied to other robotic studies.
Key words:Amphibious robots;Biomimetic robots;Bionic technology;Intelligent robots;Robotics
1 Introduction
Amphibious robots are a trans-media platform that integrates the characteristics of land and underwater robots,and can perform tasks in complex aquatic and terrestrial environments,including marshy and swampy areas as well as littoral regions (Wang GB et al.,2015).Their trans-media features have proved valuable for various types of missions (Stefanini et al.,2012),such as marine exploration,search and rescue,marine environment protection,and military reconnaissance(Furness and Camphuysen,1997;Derraik,2002).Therefore,research on amphibious robots has gained increasing interest all over the world (Martín,2010).Some research that focused on the structural design and testing of different amphibious robots laid the foundations for studying amphibious robots(Sun et al.,2011;Zha et al.,2015).However,most robots only satisfy requirements,without exceling in their mechanical properties and efficiency.Also,most existing amphibious robots have two different locomotion systems that need to be exchanged manually to fulfill both swimming in water and moving on land,which decreases their efficiency and reliability.A simple solution to improve such systems would be to incorporate the designs of nature perfected by evolution.During the continuous evolution and selection of nature,amphibians such as frogs,crabs,and turtles have gained superior trans-media movement capabilities that are valuable sources for biomimicry studies.
Therefore,to better adapt to complex amphibious environments,achieving a more covert appearance and efficient mechanisms and capabilities for performing multi-tasks in trans-media environments involving sea,air,and land,bionic robots are greatly valued.Therefore,more in-depth biomimetic robot designs at both cosmetic and mechanistic levels are needed.Based on the continuous maturing of biomimicry technology that imitates the appearance,motion patterns,and behaviors of natural creatures (Kim and Ura,2013;Wu et al.,2014),amphibious robots can be improved or recreated by learning,imitating,replicating,and reconstructing the structures,functions,and control mechanisms of natural biological systems (Ijspeert et al.,2007).
Due to the rich diversity of amphibious organisms,many different propulsion mechanisms can be modeled.The structural design of amphibious bionic robots includes mainly leg,snake,pectoral fin,and spherical types (Yang QH et al.,2007).Despite our understanding of the structural and motion characteristics of amphibious biomimetic robots,few have recapitulated the actual movement patterns of their natural counterparts,owing to their lack of the ability to adjust amphibious motion capability and cross-media motion patterns.Compared with mono marine or land environments,the increased complexity of amphibious environments requires a more comprehensive approach to the structural and performance design of robots.Because of these difficulties and bottlenecks,few amphibious robots have been deployed in real applications,despite the numerous studies in this field(Dudek et al.,2007;Yim et al.,2007).
Many researchers have focused on the bionic principles and structural design characteristics of amphibious robots (Triantafyllou and Triantafyllou,1995;Hirano et al.,2009;Calisti et al.,2015;Chen et al.,2017;Li YS et al.,2018),yet few have published a comprehensive review and analysis of amphibious biomimetic robots.Cao et al.(2012)summarized the research status of soft-bodied robots,including some aquatic-terrestrial robots.Hopkins et al.(2009) investigated and discussed the performance characteristics of numerous snake-inspired robot prototypes.Guo SX et al.(2018)investigated the research status of amphibious robots including land-water,land-air,and air-water amphibious robots.Wu et al.(2014)reviewed the research status of a small number of selected aquatic-terrestrial biomimetic robot prototypes.Overall,their studies lack a systematic and comprehensive assessment of amphibious bionic robots.
In this paper,we aim to provide a comprehensive investigation and analysis of the most up-to-date biomimetic robots.First,we introduce the potential applications of amphibious robots.Next,we review research on amphibious robots from the perspective of their natural amphibious source organisms.Third,we summarize the technical specifications of existing amphibious robots,including their weight,speed,load weight,and working depth underwater.Finally,we discuss biomimetic methods and future challenges,including bionic design and modeling,biomimicry of mechanisms,materials,structures,control technology,intelligence of bionic robots,and novel energy sources.
We aimed to present a systematic review of amphibious robots and provide guidance for future biomimetic robotic research.The movement and behavior solutions,design concepts,and operating mechanisms of amphibious robots may be transferable to other areas of robotic research.
2 Potential applications of amphibious biomimetic robots
With the development of robotic and bionic technology,amphibious robots can now fulfill more types of tasks,especially those difficult for humans to complete.They are being used widely in both civilian and military fields.Fig.1a shows the potential applications of aquatic-terrestrial amphibious bionic robots in the civilian field.
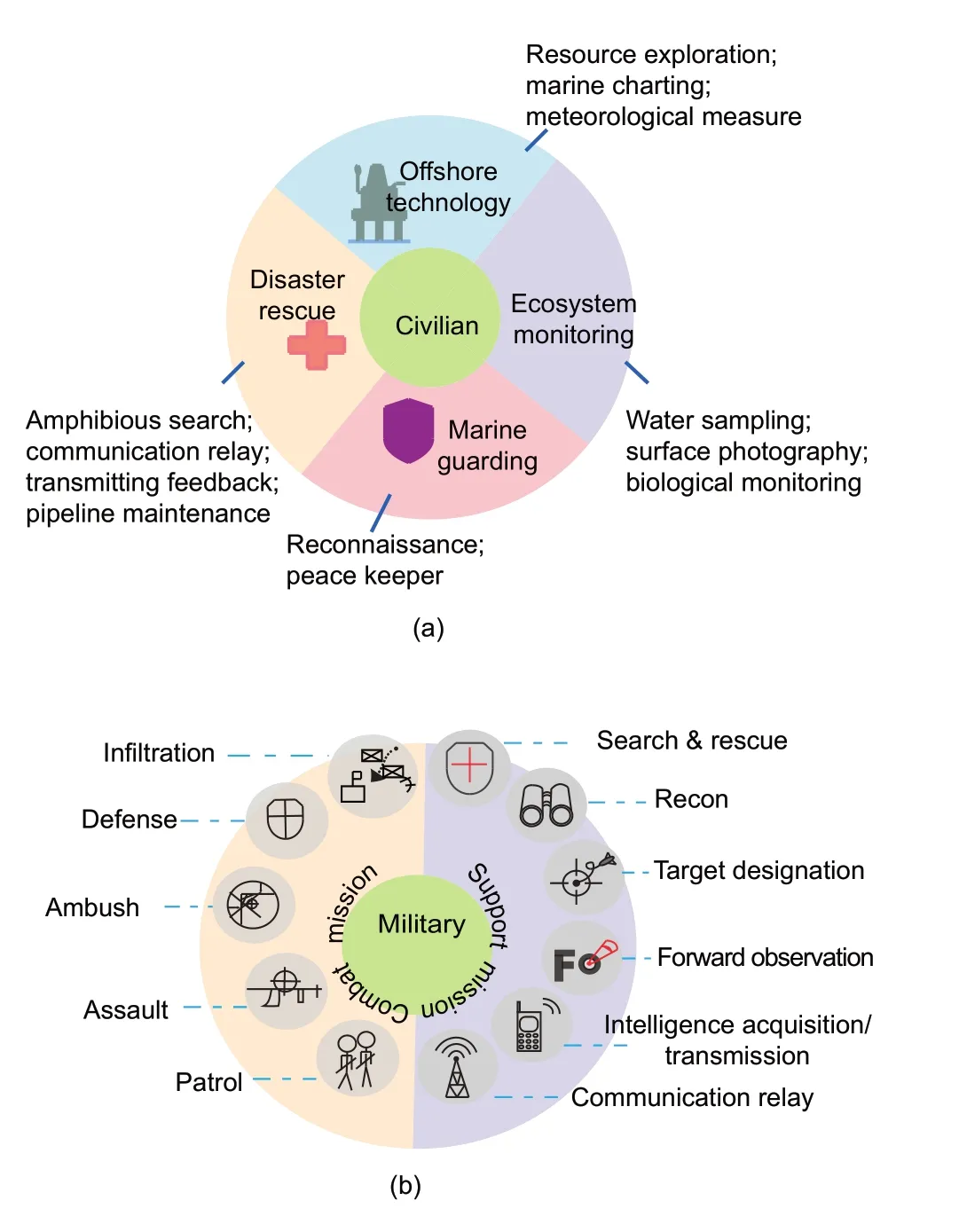
Fig.1 Application of amphibious biomimetic robots introduced from civilian(a)and military(b)perspectives
Amphibious robots have significant practical value.They play important roles in many fields,including disaster relief,energy exploration,marine security maintenance,and marine ecosystem monitoring (Yang QH et al.,2007;Favali et al.,2010;Barnes et al.,2013;Wang GB et al.,2015;Yang XB et al.,2015).Amphibious robots are advantageous for adapting to different terrains and operating in narrow spaces with high maneuverability,which allows them to carry out disaster relief tasks such as search and rescue,communication,and material transmission.They can also work in various environments that are either extremely harsh or difficult for a human to reach.The tasks amphibious robots can fulfill include high-risk activities(such as those involving toxic industrial materials,toxic industrial chemicals,or urban intelligence monitoring),seafloor gas exploration,marine charting,inspection and maintenance of underground pipelines,meteorological measurement,and service and entertainment.Moreover,with the development of advanced robotic technology,artificial intelligence,big data,cloud computation,and other modern technologies,the scope of applications of amphibious robots will be significantly extended.
Amphibious bionic robots can also help maintain or achieve military superiority.Fig.1b shows the potential applications of terrestrial-aquatic amphibious biomimetic robots in the military field.Given the multi-functional capabilities of amphibious robots,it is important to understand the critical technologies and functions of this particular type of robot (Hajduk and Koukolová,2015).
3 Amphibious biomimetic robots inspired by amphibious organisms
The amphibious biomimetic robot is a robot system that imitates the exteriors,geometries,motion modes,control modes,and skills of natural amphibians (Cao et al.,2012).Through bionic research on amphibians,amphibious robots that can realize the approximate functions have been designed (Franz and Mallot,2000).
Various amphibians in nature that have excellent amphibious athletic ability,including crabs,frogs,lobsters,turtles,and salamanders,can be used for mimicking and researching to improve amphibious robots.As shown in Fig.2,these creatures are denizens of different habits,which in turn provide biodiversity and an enormous range of habitation-specialized features(Mayr,1963;Thomas et al.,2005).The biotic habitats include terrestrial,underwater,and complex amphibious environments,in which creatures have different biological characteristics such as weight,size,and approach speed.A step chart (Fig.2) illustrates the characteristics of species occupying these environments.Based on their habitat,these creatures can be divided into three categories:underwater organisms,amphibious animals,and terrestrial organisms.The vertical gradients represent different habitation environments,including the underwater,amphibious,and terrestrial environments,from the bottom up.The terrestrial creatures include cockroaches,snakes,and crocodiles,amphibious species include frogs,lobsters,lizards,and crabs,and underwater creatures include tuna,turtles,stingrays,and octopuses.The horizontal gradients describe different sizes of the amphibious creatures,including small,medium,and large sizes.The weight icons indicate the average size of a certain creature,and different quantities represent different weights.Cockroaches,frogs,tuna,and lobsters represent the small sizes,while the octopus and crocodile are large size creatures.The yellow area in each dial in Fig.2 indicates the relative velocity of motion.
After continuous natural evolution and development,amphibians have not only the shape to adapt to underwater life inherited from their ancestors,but also the ability to adapt to terrestrial environments (Inger,1964;Dunnill,1973).Therefore,they may offer references for research on aquatic-terrestrial amphibious robots.By learning from different prominent biological creatures with amphibious abilities and imitating their structures and motion characteristics,innovative biomimetic robots could be developed to achieve desirable motion abilities and adaptation to complex amphibious environments(Liu et al.,2019).
3.1 Amphibious robots inspired by underwater origins
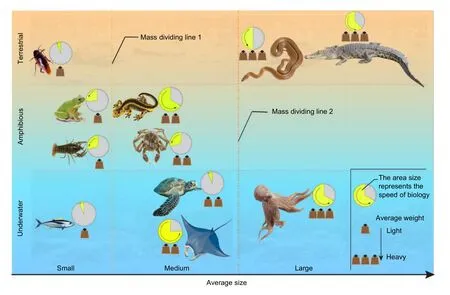
Fig.2 Characteristics of source organisms.The vertical gradients represent different habitats of creatures.The horizontal gradients describe different sizes of creatures.The weights indicate the average relative size of a certain creature,and the numbers represent different weights.The yellow area on each dial indicates the relative velocity of motion(references to color refer to the online version of this figure)
The organisms occupying the underwater gradients in Fig.2,such as the stingray,turtle,octopus,and tuna,are distributed in all oceans and have excellent swimming abilities.By imitating the fluctuating propulsion of the banded pectoral fin of rays(Duellman and Trueb,1994),several biomimetic robots have been developed,including the Aqua-ray,a sting ray-inspired robot developed in the USA in 2010,a robot developed by Harvard University in the USA in 2016,and the Velox robot(PES,2017)recently developed in the USA (Fig.3b).The Aqua-ray (Fig.3b-1),developed by the FESTO Company,uses bionic fluidic muscles to serve as actuators (FESTO,2006,2013).The biomimetic ray-inspired robot (y Alvarado et al.,2010)(Fig.3b-2) developed by MIT in the USA,integrates a buoyancy chamber and other system components in a waterproof enveloping material.The ray-inspired robot (Park et al.,2016) (Fig.3b-3) designed by Prof.Kevin Kit Parker can expand and contract in response to light stimulation to achieve fluctuation of the pectoral fin.The Velox(Fig.3b-4)has a superior propulsion effect,comprehensive abilities,and adaptability to complex environments.It can move freely on multi-terrains such as sand,snow,cobbles,asphalt roads,and ice (Fig.4).However,its flexibility and speed are inferior when traveling on land.
The turtle is another typical underwater organism,and has four paddle-shaped limbs.Its forelimbs are shorter for padding and its hind-limbs are used as rudders (Duellman and Trueb,1994).It has an excellent amphibious ability.Typical sea turtle-inspired robots include the RT-I robot(Kato,2011),the MiniTurtle,the Naro-Tartaruga (ETH Zurich,2010),and the spherical mobile robots developed in 2015 (Fig.3e).The RT-I (Fig.3e-1) has good amphibious maneuverability (Table 3).The MiniTurtle-I (Han et al.,2011)(Fig.3e-2) has good obstacle-crossing ability and is waterproof.The underwater movement of the Naro-Tartaruga (Fig.3e-3) is flexible and its propulsion speed is relatively fast(Table 3).The Beijing Institute of Technology,China has been producing compact turtle-inspired spherical amphibious robots(Fig.3e-4)since 2012 (Fu et al.,2005;Guo SX et al.,2012,2018;He et al.,2019c).The robots have been continually optimized and upgraded (Pan et al.,2015;He et al.,2016,2019a,2019b;Li et al.,2017).The structure of turtle-inspired robots is relatively compact and robust.These kinds of robots have good dexterity and excellent amphibious ability.Some also have a certain load ability and cooperative combat ability,and are well suited to perform some complex practical tasks in amphibious environments.Nevertheless,their flexibility and obstacle-crossing ability are limited.
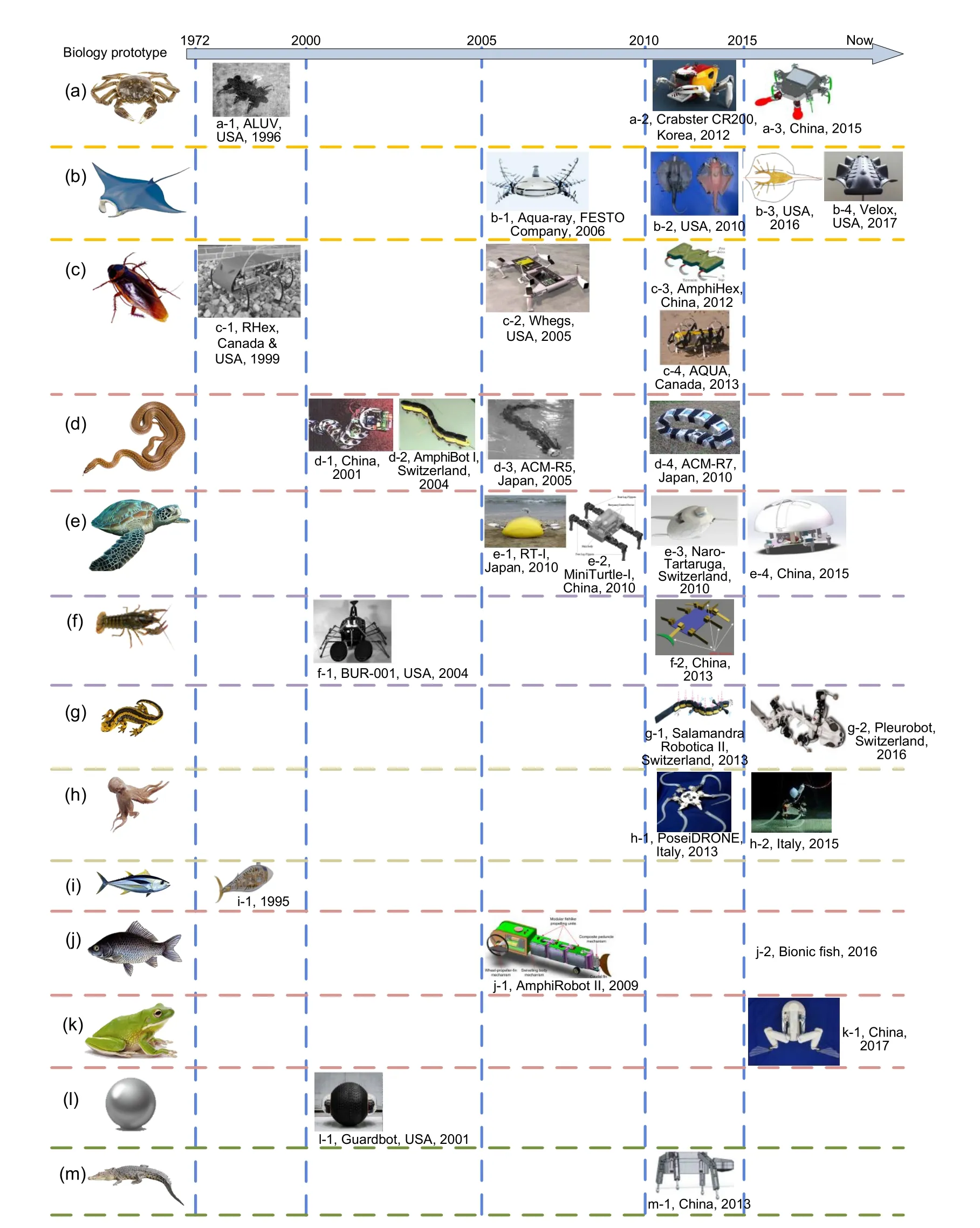
Fig.3 Aquatic-terrestrial amphibious robots and corresponding bionic creatures:(a) crab-inspired robots (Greiner et al.,1996;Yoo et al.,2012;Wang HL et al.,2015;Wang G et al.,2017);(b) stingray-inspired robots (FESTO,2006;y Alvarado et al.,2010;Park et al.,2016;PES,2017);(c) cockroach-inspired robots (Altendorfer et al.,2001;Boxerbaum et al.,2005;Liang et al.,2012;Dey et al.,2013);(d) snake-spired robots (Chigisaki et al.,2005;Crespi et al.,2005;Ohashi et al.,2010;Wu et al.,2014);(e) turtle-inspired robots (ETH Zurich,2010;Han et al.,2011;Kato,2011;Pan et al.,2015;He et al.,2016);(f) lobster-inspired robots (Ayers,2004;Shi et al.,2013b);(g) salamander-inspired robots (Crespi et al.,2013;Karakasiliotis et al.,2016);(h)octopus-inspired robots(Arienti et al.,2013;Calisti et al.,2015);(i)tuna-inspired robot(Triantafyllou and Triantafyllou,1995);(j)fish-inspired robots(Wang et al.,2009;Nguyen et al.,2016);(k)frog-inspired robot(Fan et al.,2017a);(l)ball-inspired robot(Kaznov and Seeman,2010);(m)crocodile-inspired robot(Zheng,2012).The figures are reprinted from the corresponding references,with permission from the publishers

Fig.4 Velox robot in different environments.The robot can not only march on the ground,underwater,and on sand,but also move on snow,asphalt roads,and ice(PES,2017)
In nature,an octopus can crawl and swim freely in any direction (Duellman and Trueb,1994),making it another good model organism for developing biomimetic robots.Typical octopus-inspired robots include the robot developed by Santa Ana College of Higher Education in Pisa,Italy and the PoseiDRONE(Fig.3h).Laschi et al.(2009)developed an underwater robot arm that mimicks the octopus’s arms.In 2015,an octopusinspired robot(Fig.3h-2)was developed based on the robot arm (Calisti et al.,2015).The PoseiDRONE is another octopus-inspired robot developed by this team(Arienti et al.,2013).This robot is a soft-bodied remote operated vehicle (ROV),which can realize swimming,crawling,and operating.It can swim in any direction and grasp an object simultaneously.However,whether it can move on land has not yet been confirmed.Other scholars have studied the underwater gait of octopus-inspired robots (Sfakiotakis et al.,2015).The main scope of operation of octopus-inspired robots is underwater,but due to the structure of the octopus’s eight feet,it is feasible for an octopus-inspired robot to walk on land.These kinds of robots use artificial muscles.Their bodies can bend and deform in any direction,enabling them to adapt to narrow,cave,and other extreme environments.These octopus-inspired robots realize bionic structures and materials simultaneously,but there is still plenty of room for development.
Typical underwater model creatures also include the tuna.Its body is streamlined and slender.Its tail fin is in the shape of a crescent,which enables it to swim fast in the ocean.Consequently,the tuna is also a useful model for developing a bionic prototype(Duellman and Trueb,1994).
A typical tuna-inspired robot is the RoboTuna(Triantafyllou and Triantafyllou,1995) (Fig.3i-1)developed in the USA.The robot adopts a tail fin propulsion mode,driven efficiently by a motor.It has a simple structure,but cannot be used on land or in an amphibious environment.These kinds of robots have good maneuverability underwater,but cannot achieve some grasping actions and backward movement underwater that might be necessary in narrow spaces.
Non-uniform flexible robots have also been widely studied.Typical non-uniform flexible robots include the AmphiRobot robot(Fig.3j).The AmphiRobot is modular,waterproof,transparent,and stable in motion.The robot has not been tested in various amphibious environments,consequently,its speed,climbing ability,and diving depth are unknown.An upgraded version of this robot,the AmphiRobot II(Fig.3j-1)(Wang et al.,2009),has better performance(Table 3).In 2012,the team further optimized the AmphiRobot II robot and proposed a body deformation steering approach to realize steering on land with a small rotation radius(Yu et al.,2012).A comparison between the first generation and the optimized Amphi-Robot II(Table 1)shows that the optimized robot has greatly improved performance,including speed,duration,and chest fin switching.Nguyen et al.(2016)developed a bionic fish(Fig.3j-2)with an inhomogeneous flexible tail fin driven by a motor to realize movement.It has good underwater propulsion efficiency and waterproofing capability,but cannot operatein other environments and has no certain load capacity.Similarly,another bionic robot fish (Yang QH et al.,2007)adopts a modular design and has a pair of pulley structures installed in the head to realize floating and diving underwater,and crawling on land.This robot has good module interchangeability,waterproofing capability,and flexibility.
Table 1 Comparison between two generations of AmphiRobot(Yu et al.,2012)
3.2 Robots inspired by amphibious animals
The amphibious animals in Fig.2 including crabs,salamanders,lobsters,and frogs have high maneuverability in complex environments,such as shallows,swamps,sands,and muddy embankments.By imitating these features,robots may not only crawl on the ground,but also swim underwater.
Crabs are found in oceans,rivers,and on land,usually moving on foot or crawling,and their horizontal gait is similar to that of people (Duellman and Trueb,1994;Kiontke and Sudhaus,2006).They swim underwater with flat oar-shaped appendages and move flexibly.Typical examples of crab-inspired robots are shown in Fig.3a.IS Robotics and Rockwell International in the USA developed the sixlegged crab-inspired robot,ALUV (Greiner et al.,1996)(Fig.3a-1).Its development was carried out in two stages,including the first stage robot “Ursula”and the second “Ariel”.Ariel can move forward and backward,even if completely flipped.Compared with Ursula,Ariel has improved speed and terrain adaptability (Table 3).Each robot can search for mines or threats independently using onboard sensors (compass,distance sensor).The Ministry of Marine Systems Engineering and the Institute of Oceanography in the Korea developed the Crabster CR200(Yoo et al.,2012) (Fig.3a-2).It has good waterproofing,ballast capacity,and obstacle-crossing ability,but its power supply uses cable-DC (direct current),which can limit its operation range.The crabinspired robot (Fig.3a-3) developed by Harbin University of Engineering,China,has land-walking feet and underwater swimming foot modules that are driven by waterproof steering gear.Experimental results showed that the joint rotation of the walking foot is smooth and there is no collision or interference during movement.This crab-inspired robot can walk in multi-gaits,switch freely between land and water modes,and realize a grasping action,which shows good walking and terrain adaptability.
Salamanders and lizards can live freely in amphibious environments such as fresh water and swamps(Duellman and Trueb,1994;Ijspeert et al.,2007;Park and Sitti,2009).They both have the advantages of rapid movement and change of direction (Floyd and Sitti,2008).Typical salamander/lizard-inspired robots include the Salamandra Robotica series robots and the Pleurobot (Fig.3g).The Robo-Salamander (Breithaupt et al.,2002) is a four-legged crawler that is driven by two motors.In 2009,researchers in Switzerland studied the salamander-inspired robot (Adamatzky and Komosinski,2009).Based on the snake-inspired robot AmphiBot I designed in 2007 (Ijspeert,2001;Ijspeert and Cabelguen,2006;Ijspeert et al.,2007),in 2013,the Swiss Federal Institute of Technology in Zurich,Switzerland developed the Salamandra Robotica I and Salamandra Robotica II(Crespi et al.,2013).The Salamandra Robotica II (Crespi et al.,2013)(Fig.3g-1)consists of nine joint modules.Compared with the Salamandra Robotica I,it has higher degree of freedom (DOF),torque,and speed,but still needs further improvement.For example,the limbs have only one DOF,the flexibility of the body is poor,and relatively few kinds of sensors are installed,which leads to a lack of information feedback.The team later developed another salamander-inspired robot,the Pleurobot (Fig.3g-2) (Karakasiliotis et al.,2016).It has 27 DOFs in total,and can realize walking on land,swimming,and jumping underwater.In general,salamander-inspired robots have four feet and flexible joints as the prototype.Therefore,they have good flexibility,enabling them not only to wind and fluctuate,but also to walk quickly on land.Most of these kinds of robots have good controllers(Ijspeert,2001).
The lobster is one of the most common amphibians that can move either in shoals or underwater(Duellman and Trueb,1994;Paulson,2004).It has also been a source of imitation.Typical lobster-inspired robots include the BUR-001 (Ayers,2004;Paulson,2004) and a lobster-inspired amphibious robot(Shi et al.,2013b)(Fig.3f).The parameters of the BUR-001(Ayers,2004;Paulson,2004)(Fig.3f-1)are shown in Table 3.It has both structural and material bionic components.Consequently,its movement is smooth and natural.The Beijing Institute of Technology,China,also designed a micro lobster-inspired robot (Shi et al.,2013b) (Fig.3f-2) with a compact structure.It has an accurate and effective movement mode,but its position accuracy is not satisfactory in some movements.Generally,lobster-inspired robots have multi-limbs.Consequently,they can realize some simple grasping tasks and carry a certain load.They also have good adaptability in amphibious environments.Besides,partial robots are implemented by imitating the material and structure together.These robots can realize a more compact and lighter design,and have other excellent performance features,giving them good prospects for certain applications.
The frog is also an excellent amphibious animal.It has muscular limbs and can adapt to amphibious environments very well.Consequently,it is also a good model prototype for amphibious robots (Duellman and Trueb,1994;Hirano et al.,2009).The frog-inspired robot(Fan et al.,2017a,2017b)(Fig.3k-1)developed by the Harbin University of Technology,China,is a typical amphibious robot.It is driven by a pneumatic muscle which is controlled by a high-speed switch valve.It is also completely waterproof.Generally,it has good amphibious adaptability and multisensory data feedback fusion.
Sea urchins have a wide range of movement,achieved by coordinating numerous separately rigid spines and inherent tubular feet.Inspired by the juvenile sea urchin,Harvard University,USA,designed the Urchin-Bot(Paschal et al.,2019)(Fig.5a)in 2019.The spines have seven states.The sea urchin-inspired robot has good maneuverability and is waterproof,but its speed of up to 6.03 mm/s (Paschal et al.,2019) is barely satisfactory.Future development aims to increase the freedom of each tubular foot to improve the flexibility of the whole robot,and to change the valves to realize continuous operation.
3.3 Amphibious robots inspired by terrestrial origins
Terrestrial model organisms such as cockroaches,snakes,and crocodiles (Fig.2) have outstanding moving speed on land.Cockroaches are small and can move in narrow spaces in triphibious environments(land,air,and sea).Snakes are relatively large on average,but can move fast in different environments.
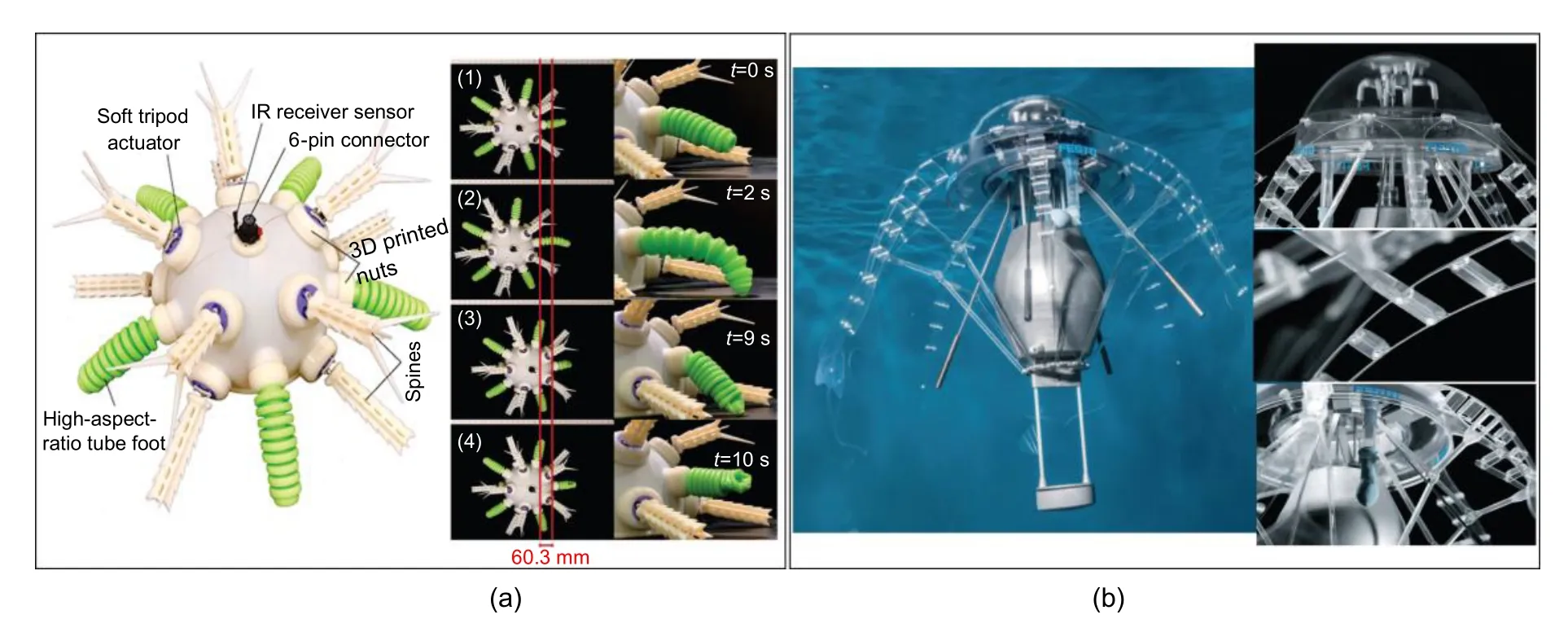
Fig.5 New biomimetic robots:(a) an urchin-inspired robot moving forward during one cycle from the top and side view in the air;(b)a jellyfish-inspired robot with its integrated structure and light-emitting diodes.IR represents the infrared ray.Fig.5a is reprinted from (Paschal et al.,2019),Copyright 2019,with permission from IEEE.Fig.5b is reprinted from(FESTO,2013),Copyright 2013,with permission from FESTO
Cockroaches can hide in extraordinarily narrow seams and move freely in triphibious spaces(Duellman and Trueb,1994).By mimicking them,biomimetic cockroach-inspired robots may have excellent abilities.Typical robots include the RHex and the AQUA (co-developed by McGill University and Laval University in Canada),the Whegs,and the AmphiHex(Fig.3c).The RHex robot(Altendorfer et al.,2001) (Fig.3c-1) has a triangular gait on land,which allows it to traverse grassland,slopes,and other complex terrains,reaching a maximum speed of 2 km/h.In 2013,the Kod team used the elasticity and reverse hook-taking action of its arc-shaped feet to enable the RHex robot not only to jump over a trench in the horizontal direction,but also to climb a vertical obstacle with a height of 730 mm.It showed excellent obstacle-crossing capability (Saranli et al.,2001).Based on the RHex,researchers at McGill University developed the AQUA (Dudek et al.,2007;German and Jenkin,2009;Speers et al.,2011) to allow adaptation to a shoal environment and realize a free switching mode between land and water (Fig.3c-4).Its parameters are shown in Table 3.On the whole,the robot has exceptional maneuverability,but during switching between land and water,the driving mechanism(arc legs and oars)needs to be changed manually.Another cockroach-inspired robot is the Whegs,developed by the Case Western Reserve University,USA(Boxerbaum et al.,2005;Harkins et al.,2005).This was followed by the Whegs IV (Fig.3c-2).The Whegs IV can cross obstacles and effectively avoid collisions.The cockroach-inspired robot AmphiHex(Zhang et al.,2013)(Fig.3c-3)can not only climb continuous steps below 160 mm,but also effectively realize underwater movement such as rising,diving,turning,and emergency braking(Zhong et al.,2016).The maximum vertical height of a crossed obstacle reaches 180 mm.The switching mode is smoother than that of the previous six-arc foot robot and performance is better.However,with an increased slope angle,the climbing speed is relatively slow,and slipping may occur.Generally,cockroach-inspired robots have good maneuverability,obstacle crossing ability,and multi-terrain adaptability(Yu et al.,2012).Notwithstanding,a part of these robots require manual replacement of driving components during transition in multi-terrains,which greatly limits their practicability.
The snake is another model organism that is often imitated.In nature,snakes crawl in a straight line or meander by twisting and turning.When snakes move on the ground,their bodies bend horizontally,which allows the back of the bent body to apply force to the rough ground,so the body is pushed forward by the reaction force of the ground (Duellman and Trueb,1994).When snakes are crawling straight,they move forward and backward by the contraction of their intercostal muscles (Chen et al.,2002).During the telescopic movement,the front part of the body raises forwards to obtain support and the rear part retracts forwards,eventually enabling continuous crawling by alternate scaling.The two ways of moving and the shape of a snake were imitated by snake-inspired robots,such as the ACM series robots ACM-R5 and ACM-R7 developed in Japan since 1972,and the robot developed by the National University of Defense Technology in China in 2001 (Fig.3d).The snake-inspired robot (Zhang et al.,2003) (Fig.3d-1)can wriggle in multi-terrain environments and realize forward and backward motion,turns,and acceleration.By using a visual sensor,the robot can collect information from the surrounding environment.In general,the robot has good flexibility,reliability,and expansibility.By imitating the shape and neural control mechanism of the snake,the AmphiBot I (Crespi et al.,2005) (Fig.3d-2) developed in Switzerland uses undulatory locomotion.The whole length of the robot can be changed by increasing or decreasing the number of modules,based on requirements.The series of ACM snake-inspired robots has been studied by the Tokyo University of Technology in Japan since 1972.Since the first ACM-III,subsequent robots,such as ACM-R3,ACM-R3n,ACM-R4,ACM-R5,and ACM-S1,have all been snake-shaped (Hirose and Yamada,2009).Depending on different driving modes(Hirose and Yamada,2009),these robots can be classified as follows(Table 2).The ACM-R5,designed in 2005,is based on an imitation of the snake-inspired robot HELIX.The HELIX is a 3-DOF robot using theprinciple of helical distortion propulsion (Takayama and Hirose,2002).Some of its parameters are shown in Table 1.In an amphibious environment,the robot’s movement is greatly affected.Recently,the ACM-R7(Fig.3d-4)with a circular gait was developed(Ohashi et al.,2010).During marching,the robot is connected end to end to form a circular structure,and the rolling motion of the robot is realized by the synchronous swing of each joint.The motion mode of the robot is suitable for flat ground,but its stability is not good when the speed is fast.It also features waterproofing.In general,snake-inspired robots have good flexibility and adaptability in amphibious environments.Usually,this kind of robot is a modular system,so most have good reconstruction and stability.Most of these robot structures are sealed and can be deployed in harsh environments.Notwithstanding,wired control greatly reduces the range of movement,and because of structural limitations,the load capacity is small.
Table 2 Snake-inspired ACM series robots
AB:active bending joint type;ABE:active bending and elongating joint type;ABAW:active bending joint and active wheel type;PBAW:passive bending joint and active wheel type;ABAC:active bending joint and active crawler type.This classification method is from Hirose and Yamada(2009)
In addition to the above model organisms,the crocodile is worthy of imitation.A crocodile-inspired robot (Fig.3m-1) designed by Wuhan University of Technology,China,can swim by the tail and walk using its legs.Its legs adopt a quadruped joint moving mechanism,driven by a motor.This robot is in the initial stages of research and there is no corresponding control structure or sealing structure.Consequently,further research is needed.
3.4 Robots inspired by other origins
In the process of robot research,in addition to mimicking the origins,it also can imitate inanimate objects.The Guardbot (Kaznov and Seeman,2010)(Fig.3l-1)developed by the military of USA is a typical sphere-inspired robot.Its principle is the inverted pendulum model,which integrated the nine-axis stabilizer and the pendulum system and constantly adjusted the center of gravity in the process of movement,to realize the continuous amphibious motion.Similarly,Sweden also developed a sphere-inspired robot Groundbot.It has no waterproof and limited activity space(Kaznov and Seeman,2010;Li YS et al.,2018).
Generally,the sphere-inspired robot has a compact structure,excellent sealing performance,good trans-media adaptability,a certain load capacity,and variable size based on the demand.Notwithstanding,its stability and obstacle-crossing ability are not ideal.
In addition to the above biomimetic robots,numerous other kinds of robots inspired by creatures stand out.For example,the improved version of the jellyfish-inspired Aquajellies robot developed in 2008(Fig.5b),has an excellent lightweight construction,efficient energy use,integrated communication,and intelligently confused sensor technology.It also can grip things and swim in various directions (FESTO,2013).Although it did not achieve amphibious capabilities,its design is very enlightening and inspiring for the design of amphibious robots.No doubt,in future there will be more model organisms imitated by robots.
4 Technical specifications of current robots
The main specifications that can reflect the comprehensive performance of amphibious robots are underwater speed,land speed,underwater mass,total mass on land,diving depth,and working load.Fig.6a reveals that the underwater speed of most robots is about 0.5 m/s.Only a few robots reach 2 m/s,such as the tuna-inspired RoboTuna and the turtle-inspired Naro-Tartaruga.The possible reason is the high comprehensive efficiency in the process of underwater propulsion,which involves combined contributions from both the BCF(body and/or caudal fin propulsion)propulsion mode and twin flexible forelimb/hindlimb auxiliary drive mode.Fig.6b shows the weight of amphibious robots on land.The weight differs for robots with different functions,material structures,bionic types,and load capacities.The smallest and lightest robot is the sting ray-inspired robot,which weighs only 0.01 kg and is the size of a coin.The heaviest robot is the Crabster CR200 (300 kg),which features a load capacity of four operators.Fig.6c shows the velocities of some typical amphibious robots on land or in amphibious environments.The average speed on land is about 0.5 m/s,and the maximum is 2.25 m/s(cockroach-inspired robot AQUA).Wheel-type robots have a higher speed on land (Table 3).Amphibious robots can reach a maximum working depth of 200 m underwater,but deep-sea compatible robots are still the minority(Fig.6d).The maximum load capacity is 5.44 kg (the ALUV),while most other amphibious robots have poor or no-load capacity at present,due to their structural design or targeted applications.
Locomotion capability is also one of the comprehensive performance indicators of amphibious robots.Due to the big differences in the size and quality of robots,in this paper we propose an amphibious robot locomotion capability evaluation coefficient,i.e.locomotion capability of amphibious robot (LCAR),to evaluate their locomotion capabilities.This index is defined as the ratio of the running speed of the amphibious robot to its weightm
.This index can characterize the locomotion capabilities of amphibious robots with large size differences in the amphibious environment more accurately than a simple speed value.The running speed of robots can be accounted by the speedv
(m/s) or the body length per second(BL/s).Here,we use the speedv
(m/s)to illustrate the definition of LCAR:
Fig.7 shows the locomotion ability of partial bionic robots based on this evaluation index.The locomotion ability coefficients of robots with different volume and mass are distributed between 0 and 0.3,concentrated mainly between 0 and 0.1 (Fig.7).The proportion of amphibious bionic robots whose mass is below 100 kg is relatively high.The locomotion ability of amphibious robots can be improved by methods such as increasing their speed,reducing their mass,or increasing their power-to-weight ratio.
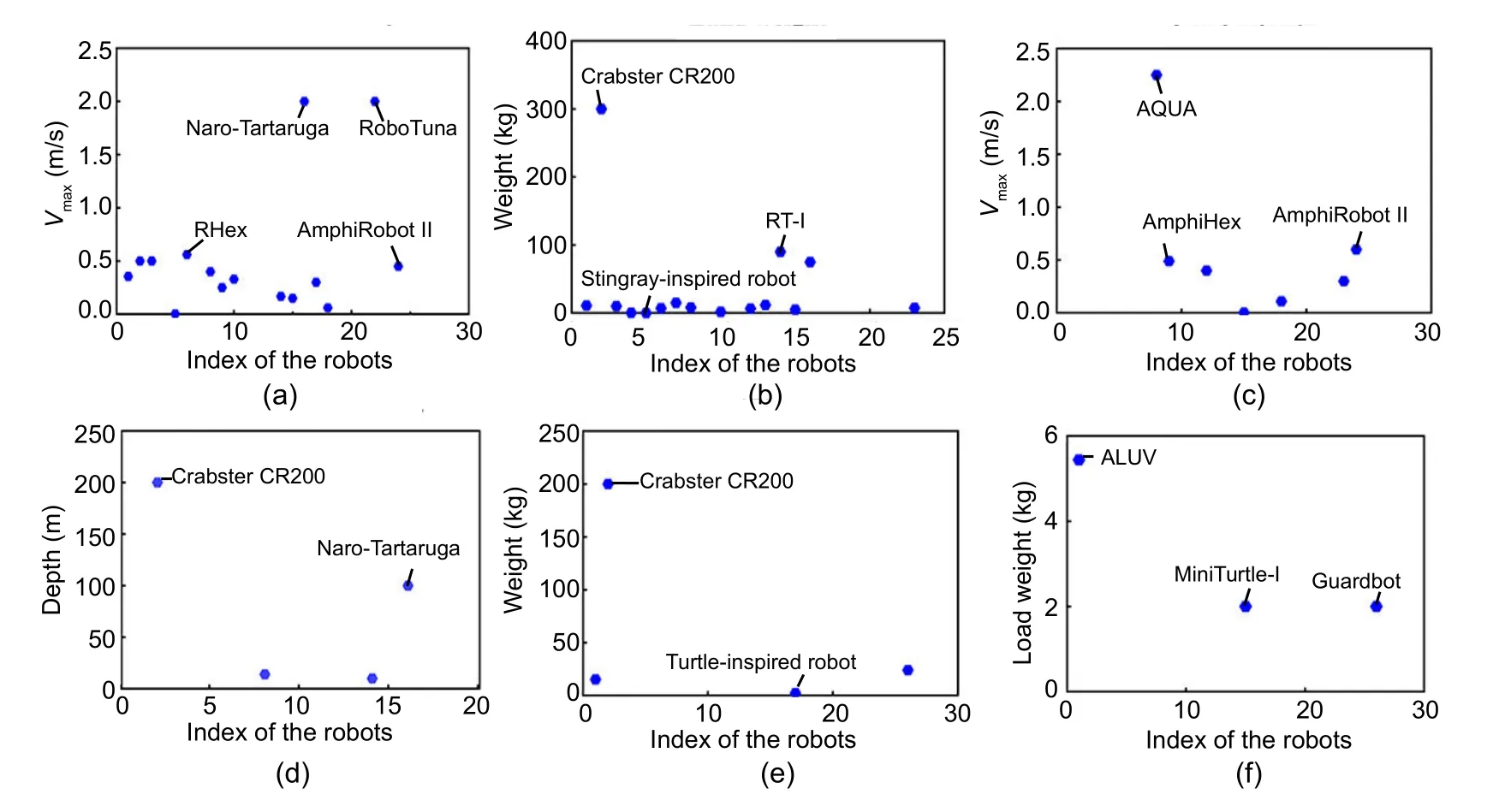
Fig.6 Parameters of some typical amphibious robots:(a)underwater velocity of robot;(b)land weight of robot;(c)land velocity of robot;(d)robot working depth in water;(e)underwater weight of robot;(f)robot load capacity.The index of the robots corresponds to the ordinal index in Table 4.Vmax represents the maximum velocity of robot
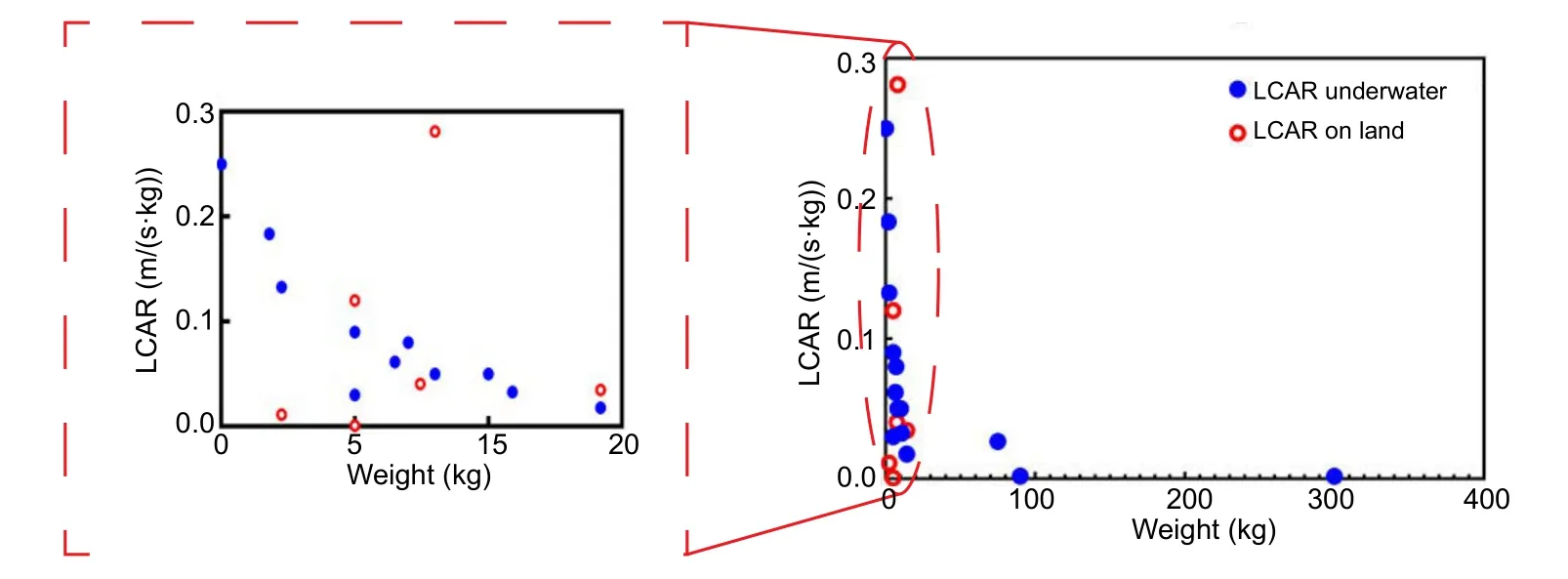
Fig.7 Locomotion capabilities of amphibious robots
The Velox robot stands out among amphibious robots by virtue of the following characteristics:a high-efficiency undulating propulsion system,excellent static thrust,stealth features,multi-terrain accessibility (sand,snow,ice,and other solid matrices),entanglement-resistance (prevents entanglements by plants or other underwater objects),and low environmental impact.However,the robot has poor steering and bending capabilities while moving,and thus loses performance in complex amphibious environments.Indepth studies of their structural characteristics,DOFs,flexibility,stability,bending flexibility,and desirable terrain adaptability are still required.
5 Biomimetic principles,challenges,and vision of biomimetic amphibious robots
5.1 Bionic structural design and modeling
Amphibious organisms have excellent adaptability to complex environments and excellent amphibious athletic ability.In the research and design of amphibious robots,amphibians are used as model organisms to imitate different characteristics of their appearance,movement,and control methods.Bionics research of the model organisms reveals the functional characteristics of the organisms,enabling the design of amphibious robots with similar functions.
The basic design principles of amphibious robots differ due to the differences among the model organisms.Structural design is never a trivial task,due to the demanding requirements for flexibility,stability,tightness,and adaptability in trans-media environments(Mufti and Hsiung,1989;Diard et al.,2004).By studying the internal and external structures and motion characteristics of the biological models,biomimetic robots can be modeled and kinetic and dynamic analyses can be implemented (e.g.Crabster CR200,Velox,and Pleurobot).
Waterproofing capability is an important index for robots that are designed to operate in deep-sea and amphibious environments,where corrosion,low or varying temperatures,and high pressure may have considerable impacts on their structural integrity and performance (Sawano et al.,1984).Typical waterproof robots include the MiniTurtle-I turtle-inspired spherical robot and the RT-I.Biomimicry of structure design can be implemented by imitating the mechanisms and materials,such as in the robots (Figs.3b-2 and 3b-3) and PoseiDRONE (Fig.3h-1),and the structures of biological creatures,such as in the robots ALUV,Aqua-ray,BUR-001,and Pleurobot.
The key to the design and modeling of biomimetic robot structure lies in the establishment of an accurate model of the biological mechanism.However,biology itself is a complex system including nerves,muscles,bones,and other factors,the single experimental conditions or research methods,and the mechanism is a multidisciplinary research process.Although many researchers in this area conduct research from the perspectives of theory and experiment,there are still problems such as the development of simple and fuzzy models for the establishment of models of biological mechanisms.As a result,there is still a gap between the designed bionic robot and its natural organism.Therefore,biomimetic structural design and modeling are the keys to research on biomimetic robots.
5.2 Biomimicry of mechanisms
During centuries of continuous evolution and natural selection,amphibians have gained superior trans-media movement ability.Due to their rich amphibious biological origins,many propulsion mechanisms have evolved.However,most robots only satisfy requirements,and few have excellent mechanical properties and efficiency.
Aside from research on biomimetics,studies of mechanisms of motion can improve the design of amphibious robots.Most biomimetic robots imitate the motion mechanisms of their corresponding biological source organism(Table 4).Some of the source organisms have relatively simple moving patterns,which are replicated in the robots.This can result in difficulties in completing tasks in complex environments,such as transitional terrestrial and amphibious environments.Examples include (3),(4),(5),(16),(21),(22),(23),and (25) in Table 3.The Aqua-ray (3) and stingray-inspired robot (4) use the fluctuation of the pectoral fin to swim underwater.The pectoral fins of the Aqua-ray(3)are driven by a pair of bionic fluidic muscles and powered by its water-driven central vane cell pump.The stingray-inspired robot (5) uses MPF (media and/or paired fin propulsion) propulsion through the stimulation of cardiomyocytes by external stimuli.The Naro-Tartaruga(16)robot is driven by four limbs to realize underwater movement.The PoseiDRONE (21) is a soft-bodied ROV,allowing it to realize the different motion patterns of an octopus.The Salamandra Robotica II,RoboTuna,Amphi-Robot,and fish-inspired robots ((19),(22),(23),and (25)) use the wobble of the tail fin to achieve motion underwater.However,they are merely aquaticoriented robots rather than amphibious robots.Their motion mechanisms prevent them from fully completing tasks in aquatic-terrestrial environments.When the environment switches between aquatic and terrestrial,these robots require manual replacement of their driving components,such as the arc legs and the oars of the bionic robots AQUA (8) and AmphiHex(9)(Table 4),but there is also excellent biomimicry of mechanisms to realize the movement of amphibious robots in amphibious environments.The driving structure of the Velox is a pair of fish fins designed with a hyperbolic geometry for the advance and steering of the robot(Pfeifer et al.,2007;Ijspeert,2008).When the Velox is near land,its fins can be rotated 90° to march on the ground.The crab-inspired robot’s walking and swimming feet respectively comprise a parallel five-bar mechanism and 3-DOF joints in series,which can switch freely between land and water.The ACM-R5 (Hirose and Yamada,2009) (Fig.3d-3) is composed of eight joint modules.The number of joints can be changed on demand.Each joint has 2 DOFs of pitch and yaw and is equipped with a telescopic film.The robot marches forward in fluctuating mode on land by its special “fin” and swims by the“fin”.Due to the slender structure,the resistance of the whole robot is low.Consequently,the practicability of this type of robot is relatively limited in some environments.
Foot-propelled robots,such as the biomimetic robots (1),(2),(6)-(9),(15),and(18)in Table 4,can adapt to terrestrial and aquatic environments simultaneously.The four legs of the Salamandra Robotica II(Crespi et al.,2013)are edsymmetrically mount at the second and sixth joints.Because a motor and a controller module are installed at each joint,it has high speed and torque.The robot realizes forward and backward motion on land by a combination of walking on four feet and winding of the body.It realizes anguilliform swimming by the fluctuation of each joint underwater.The UrchinBot (Paschal et al.,2019) includes five pliable tubular feet with a high aspect ratio and ten stiff spines,which are connected individually to the shells by 3D printed nuts and a ball joint structure.The feet and spines are actuated simultaneously by five and three valves,respectively.The motion of the robot is achieved by the incorporation of a neodymium magnet in the tip of each foot to make movement on the surfaces by a reach,attach,retract,and release sequence,which can realize the action of stretching and contracting underwater or on land.It is equipped with a battery,valves,and pumps in its hollow body to enable each tubular foot and tripod actuator to have a pressure differential.Nonetheless,their structures are complex and their efficiency is low whether underwater or on land,and the stability and walking speed of the robots are relatively deficient.
Therefore,apart from research on biomimetics,the study of the excellent mechanisms of motion of natural amphibians is the basis for realizing the efficient movement of robots in amphibious environments.
5.3 Biomimicry of materials
Based on research of the structures and processes of formation of natural biological materials,biomimetic materials can be tailored to achieve specific mechanical and biological characteristics.
Biological materials have natural healing properties,environmental adaptability,continuous deformation capabilities,and a high DOF.They are the most appropriate in terms of overall performance.Compared with traditional materials,biomimetic materials are closer to the material properties of organisms,which can make bionic robots closer to organisms.
The typical robots mimicking natural materials are the Aqua-ray,Stingray-inspired robot,and PoseiDRONE ((3),(5),and (21)).The pectoral fins of Aqua-ray (3) (FESTO,2006) (Table 4) use flexible material and are individually controlled by the motor to realize the fluctuating propulsion mode.The body of the Stingray-inspired robot(5)(Park et al.,2016)is composed of two layers of soft silica gel with an artificial gold soft skeleton in the middle,which reduces the weight as much as possible.The core component of its driving system is the mouse myocardial cells that contain genes which confer strong photosensitivity.The PoseiDRONE (21) has almost no rigid structure (Arienti et al.,2013).Another octopus-inspired robot is driven by the deformation of a shape memory alloy at different temperatures to realize different movements.The temperature can be adjusted by changing the heat of the resistance wire (Cao et al.,2012).The robot arm (Laschi et al.,2009) uses a soft actuator based on silica gel material and electroactive polymer (EAP) technology.Researchers analyzed the swimming process and determined the propulsive force that can be produced by swinging the robot arm.The micro lobster-inspired robot(Shi et al.,2013b)is equipped with nine ionic polymer metal composite(IPMC)actuators,two of which are used as fingers to realize grasping.The others are used as legs to walk,rotate,and float.Due to the use of the new material IPMC,it has good flexibility and is lightweight (Shi et al.,2013b).The BUR-001 (Ayers,2004;Paulson,2004)has both structural and material bionic features.The driving module of the PoseiDRONE consists of a gear motor and a crank mechanism embedded in silica gel.
These robots all imitate the material of the source creature and obtain good performance.Biomimetic materials have excellent performance,making biomimetic robots closer to living organisms.They have a high-efficiency actuator and good flexibility,and good prospects for application to bionic robots in the future.However,currently limited by bionic materials,manufacturing processes,and core components,the performance of most bionic materials is not high,and there is still a lot of room for improvement.
5.4 Biomimicry of structure
Structural biomimicry includes a recapitulation of different biological structures,movement modes,and principles of propulsion.
5.4.1 Biomimicry of structure
Based on the research of natural amphibious sources,biomimicry of structure aims to make the shape and structure of a robot close to that of the source organism and to duplicate the structural characteristics to better imitate biological athletic ability and environmental adaptability.From a micro perspective,organisms have an excellent aerobic and anaerobic coordinated energy supply mode and excellent microstructure characteristics.From a macro perspective,the body’s contour,shape and structural parameters,and external physiological characteristics all have relatively good characteristic parameters.For example,the rigid-flexible coupling structure mode combining a rigid skeleton of an organism and a flexible muscle actuator is an excellent bionic perspective.
Typical structural bionics includes marine animal bionics,snake bionics,and leg pod bionics.The biomimicry of the structure of marine animals aims mainly to imitate their unique shapes and movement methods.Under water,fish have a streamlined shape to reduce the resistance of the fluid to their bodies.The swinging of the tail fin,pectoral fin,and body of fish is the main way to realize wave propulsion and paddling of fish.By imitating these characteristics of fish,controlling the movement of the fins can realize a variety of actions,including marching and steering in biomimetic robots such as (3)-(5),(14)-(17),and(21)-(25)(Table 4).The robot arm has a good control effect by controlling the deformation of the torso.Based on biological anatomical results,the interaction effect between bone and flexible skin of the Aqua-ray was designed by simulating the swinging mode of the pectoral fin.
The biomimicry of the structure of a snake aims to mimic the multi-vertebral high-redundancy joint structure model.Its flexible body deformation produces different ways of moving,and it can move in a narrow and complex environment with uneven sand and amphibians.By imitating these characteristics of snakes,snake-inspired robots can achieve features such as multiple DOFs,flexible obstacle avoidance,and modularity.The modularity of the structure of biomimetic robots,such as (10)-(13),(19),and (20) (Table 4),allows them to increase or decrease their lengths based on demand,and provides good replaceability and convenient maintenance.The whole length of the AmphiBot I(Crespi et al.,2005)can be changed by increasing or decreasing the number of modules based on requirements.The ACM series robots (Hirose and Yamada,2009)comprise several connected joint modules.The Guardbot (Kaznov and Seeman,2010) can change its size as needed.The MiniTurtle-I(Han et al.,2011) is convenient to maintain because of its modularized body,and is practical because of its certain load capacity.Therefore,the modularization of robots is a great advantage.
By imitating the multi-leg characteristics of legged animals,robots such as the biomimetic robots(1),(2),(6)-(9),(15),and (18) in Table 4 can achieve features such as good maneuverability and stability.Robot (2) in Table 4 (Yoo et al.,2012) is designed to map and investigate subsea structures and shipwrecks.It features six walking feet distributed on both sides of the body.It uses a multi-DOF walking foot.AmphiHex(9)(a deformable foot-web combined amphibious robot) (Zhang et al.,2013) walks using an arc-shaped foot,and swims underwater using a web that is deformed by the arc-shaped foot.In a shoal and sediment environment,arc foot and web structures are gradually deformed to realize movement.The movement of the BUR-001(18)(Table 3)is realized by a multi-leg walking mode on land and hydrofoil underwater.This robot has both structural and material bionic features.Its movement of a driving muscle is closer to the biological movement mode(Chen et al.,2017)and is consequently smoother and more natural.The RT-I (Kato,2011) has four leg units with 3 DOFs,which can realize three swimming modes and walking modes.The Ursula(Greiner et al.,1996) is equipped with six 2-DOF legs,three on each side,which can move up and down independently such that it can walk in a variety of gaits.The Ariel is equipped with two-section legs,which can rotate independently around coplanar axes.The walking gait of Ariel closely mimics the actual crab.The hip joints are capable of rotating±90°and the knee±135°.All these examples demonstrated here reveal that a good and reasonable bionic perspective and motion mechanism are the keys to designing amphibious robots.
The bionic structure determines the movement directly,and thus affects the flexibility,stability,and mobility of a robot.Nevertheless,at present both motion mechanism design and adumbration design are different from those of the source organism.
5.4.2 Propulsion methods of biomimetic robots
One of the most important aspects of structural biomimicry of amphibious robots is mimicry of natural propulsion methods.Categorizing from working environments,the propulsion methods include underwater propulsion and amphibious propulsion methods.Underwater propulsion methods include body fluctuation,tail fin fluctuation,and wheel-leg and propeller combined propulsion(Fig.8).Amphibious propulsion methods include mainly leg-type propulsion (e.g.,ALUV,Crabster CR200,and RHex),fin/flipper propulsion (e.g.,Aqua-ray,Velox,and Naro-Tartaruga),and fin/flipper+leg combined propulsion (e.g.,AQUA and AmphiHex).The RHex robot’s (Altendorfer et al.,2001)arc-shaped propulsion method between a wheel and leg is of great interest to many researchers.The MiniTurtle-I (Han et al.,2011) uses the effective leg-flipper propulsion mode,enabling easy and efficient marching in amphibious environments.It has good obstacle-crossing ability and is waterproof.
Propulsion methods include mono propulsion modes and combined propulsions.Mono propulsion modes include leg,serpent-like,wheel,fin,flipper,and paddle propulsion.Combined propulsions include fin/flipper+leg,wheel+serpent-like,leg+wheel,pectoral fin+serpentine,and wheel+finned combined propulsion.For example,to cross large obstacles,the Whegs IV was designed with two parts connected by internal and external shafts.The robot employs the combined wheel-leg propulsion mode and uses one motor to drive six propeller-legs.It can independently change the direction of each thruster to achieve multidirectional movement.
Based on the previous typical robots in the third section,comparisons of different propulsion methods are summarized in Table 3.The summary reveals that combined propulsion is advantageous in movement speed,efficiency,maneuverability,and stability,resulting in a more suitable robot configuration for complex and trans-media amphibious environments.For example,by combining the motion modes of rays and snakes,the robot can fluctuate bionic fins underwater like a ray fish,and wind its body on the ground like a snake.Robots with this combined configuration harness significant advantages in trans-media terrain adaptability and obstacle-crossing capability.
The AQUA (Dudek et al.,2007;German and Jenkin,2009;Speers et al.,2011;Dey et al.,2013)freely walks on land using its curved walking foot driven by a servo motor sealed inside.Its maximum speed reaches 2.25 m/s.The movements of floating,submerging,and steering are realized underwater by converting the six walking feet to the straight pulp as the swimming fin and controlling the beat phase changes.The AmphiRobot (Yang QH et al.,2007;Nguyen et al.,2016) is composed of a head with wheel paddles,several modular propulsion units driven individually by motors,a flexible flapping foil,and a passive wheel on the last unit.Underwater it is propelled by a flexible posterior body combined with foil,and on land it is pushed by the wheel structures.The robot is modularized(the number of modules can be increased or decreased as needed),waterproof,transparent (the transparency of the head facilitates control and inspection),and stable in motion.However,when switching in a trans-media environment,the actuator needs to be changed manually,which is a great inconvenience compared with robots without this requirement.In the AmphiRobot II (Wang et al.,2009),the problem of manual actuator replacement is solved by installation of a wheel-propeller-fin mechanism formed by integrating the wheel and fin.
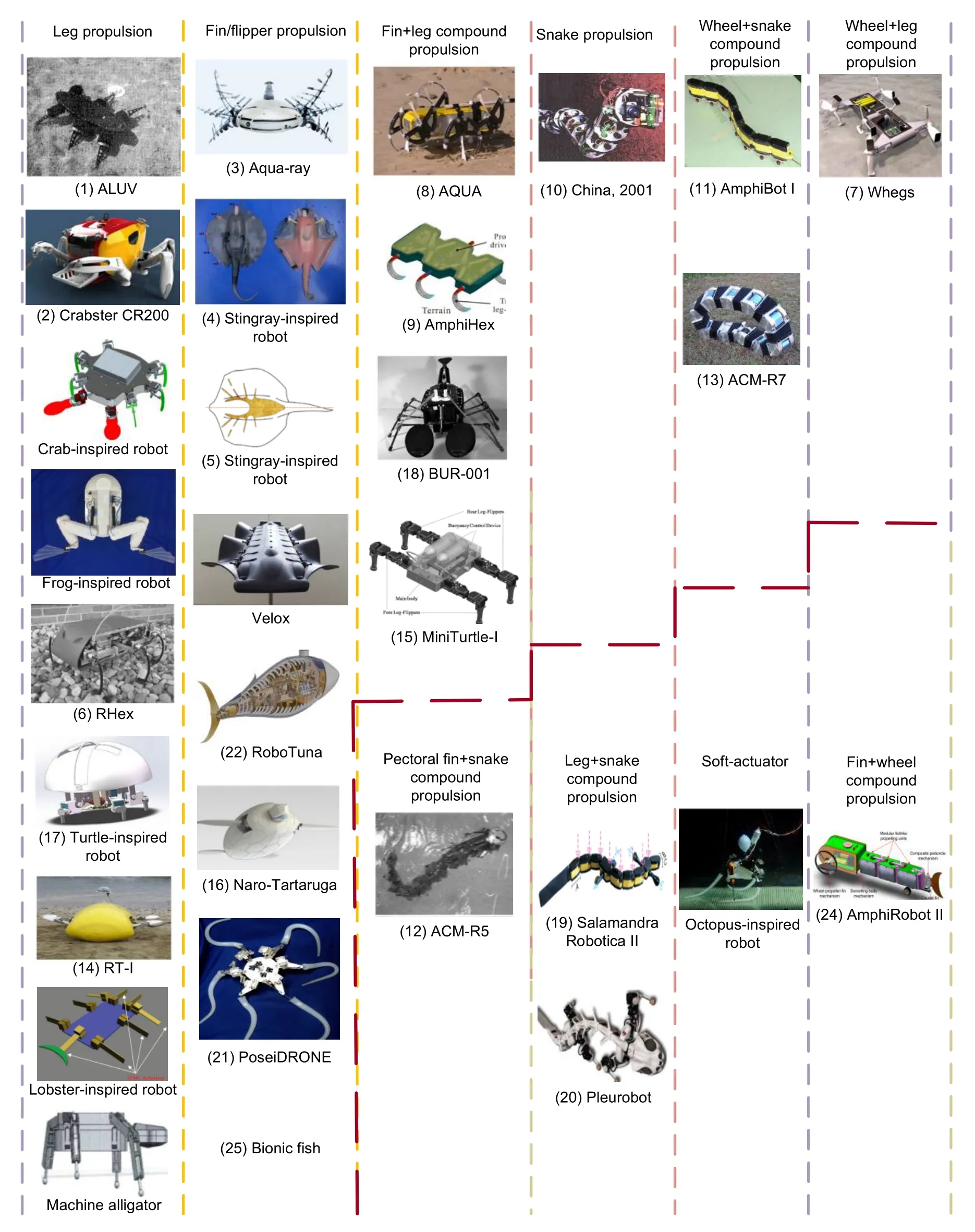
Fig.8 Different propulsion methods of amphibious robots
Therefore,it is important to choose a propulsion method suitable for a chosen application environment.In the current situation where the degree of bionics is not high,a combined propulsion method in the amphibious environment has better performance.
5.4.3 Actuators of biomimetic robots
The actuator of a robot is as important as the propulsion mode.The actuator is the core component of a robot and the basis of its movement.The performance of the actuator directly affects the endurance and load capacity of a robot,its smoothness,and the flexibility of its movements during operation.Many driving methods have been studied,such as motors,shape memory alloys,high-pressure gas,and pneumatic muscles.
The actuators of a biomimetic robots include hydraulic,motor,pneumatic,and new flexible actuators,based on their power source.New flexible actuators include mainly fluid actuators (soft pneumatic muscles,soft hydraulic actuators),smart material actuators(conductive polymer actuators,shapes,and alloy actuators),chemical actuators,and biological actuators.The Naro-Tartaruga uses fin propulsion driven by a motor.Its frame provides a large space to place control systems,batteries,and sensors.The robot arm(Laschi et al.,2009)uses a soft actuator based on silica gel material and EAP technology.The Whegs(Boxerbaum et al.,2005;Harkins et al.,2005) employs the combined wheel-leg propulsion mode and uses one motor to drive six propeller legs.The four limbs and spine of the Pleurobot (Karakasiliotis et al.,2016) are driven individually by one motor.Consequently,it can realize walking on land and swimming underwater.
At present,biomimetic robots are driven mostly by motors,which require a large installation space.This increases their overall volume and weight,and provides a relatively low driving power.Bionic smart material actuators are more efficient.However,the controllability of some actuators is poor,and the manufacturing process is not mature enough.Moreover,it is necessary to increase control sensitivity,precision and actuator intelligence,and versatility for better performance.Regardless of the great progress made in this field,there is still much room for improvement in miniaturization,stability,speed,and low energy consumption.
5.4.4 Biomimicry and biolization of biomimetic robots
Based on bionic structural design,higher-level biomimicry and biologization (in which the structure of the robot contains living cells or some artificial living bodies) may be an important trend in the future.At present,most amphibious biomimetic robots have matched the geometry of their corresponding model source organisms,but there are still gaps in terms of their materials,structure principles,and functionalities (Pfeifer et al.,2007;Ijspeert,2008).Particularly when on special missions,amphibious robots need to be as covert and efficient as the real creature to avoid outside surveillance and fulfill required tasks.Increasing the level of biomimicry hence becomes a major focus in developing future amphibious robots.However,the source organisms have outstanding flexibility which is difficult for machines to achieve.With the development of 3D printing technologies,the biologization of biomimetic robots becomes possible (Lin et al.,2021,2022).Partial human organs have been printed in recent years,which brings new inspiration to the biologization of robots (Mirvakili and Hunter,2018;Jiang et al.,2019).By using living biological structures,future robots may be closer to their source organisms.
5.5 Bionic control technology
Biomimicry also can be implemented by imitating the control mechanisms of biological creatures (Fig.3e-4).The excellent and accurate control ability of a living organism cannot be mimicked by a robot.Complicated amphibious environments require amphibious robots to have environmental adaptability,running stability,and controllability (Wegst et al.,2015).Bionic control technology aims to simulate the mechanism of an animal’s nervous system to control a robot.Based on bionics research,a welldesigned control system is a key to completing functions such as self-adaptation and clustering for a biomimetic robot.The bionics of control mechanisms include genetic algorithms based on group strategies,nervous systems,feedback mechanisms,and behaviors (Ijspeert,2008).Central pattern generator(CPG) control mode is predominantly used by amphibious robots,such as the AmphiHex,ACM,and AmphiBot (Matsuo et al.,2008).For example,AmphiRobot (23) is controlled by CPG mode to coordinate its action in the propulsion process(Wang et al.,2009).Pleurobot (20) is controlled by CPG mode wirelessly,and its joint motor can adjust its speed(Karakasiliotis et al.,2016).The BUR-001 (Ayers,2004;Paulson,2004) is driven by artificial muscle and controlled by CPG(Chen et al.,2017).Feedback information from sensors is used to avoid obstacles and for robot movement.The crab-inspired robot includes six-coupled Hopf oscillators on each walking foot that simplify the control method,based on CPG.The gait of the Salamandra Robotica II(Crespi et al.,2013) switching in a trans-media environment is realized using the CPG mode.Suitable bionic control can greatly optimize the performance of bionic robots.At present,multi-robot systems(those in which multiple robots of the same or different types perform tasks together)are the main development trend,therefore it is necessary to increase the diversity and efficiency of tasks performed by different robots.A typical cluster robot is the turtle-inspired spherical amphibious robot (Li et al.,2005;Guo SX et al.,2012,2018;He et al.,2019c) equipped with an improved RGB-D (red,green,blue-depth map) visual tracking system.The robot can work in narrow spaces and complex amphibious environments.Its structures are manufactured by 3D printing technology.Based on the mono robot,the team later also developed the GSL system,which is a parent-child robot system (Pan et al.,2015) (Fig.9).The parent robot acts as a base station to provide energy for small robots.Several child robots that communicate with each other in real time are controlled to cooperate in performing the tasks (Shi et al.,2013a).Due to the cable connection between the GSL parent robot and the child robot,the child robot can acquire a relatively stable power supply,but this also severely restricts the range of activities of the child robot.
With the development of modern artificial intelligence technology,artificial neural networks,fuzzy control,and genetic algorithm technology can potentially be used widely in future bionic control strategies to improve accuracy and robustness during the control of robots (Speers et al.,2011).Also,through superior control,amphibious robots could switch autonomously into the amphibious mode,making the robot’s gait more smooth and natural (Yang QH et al.,2007).
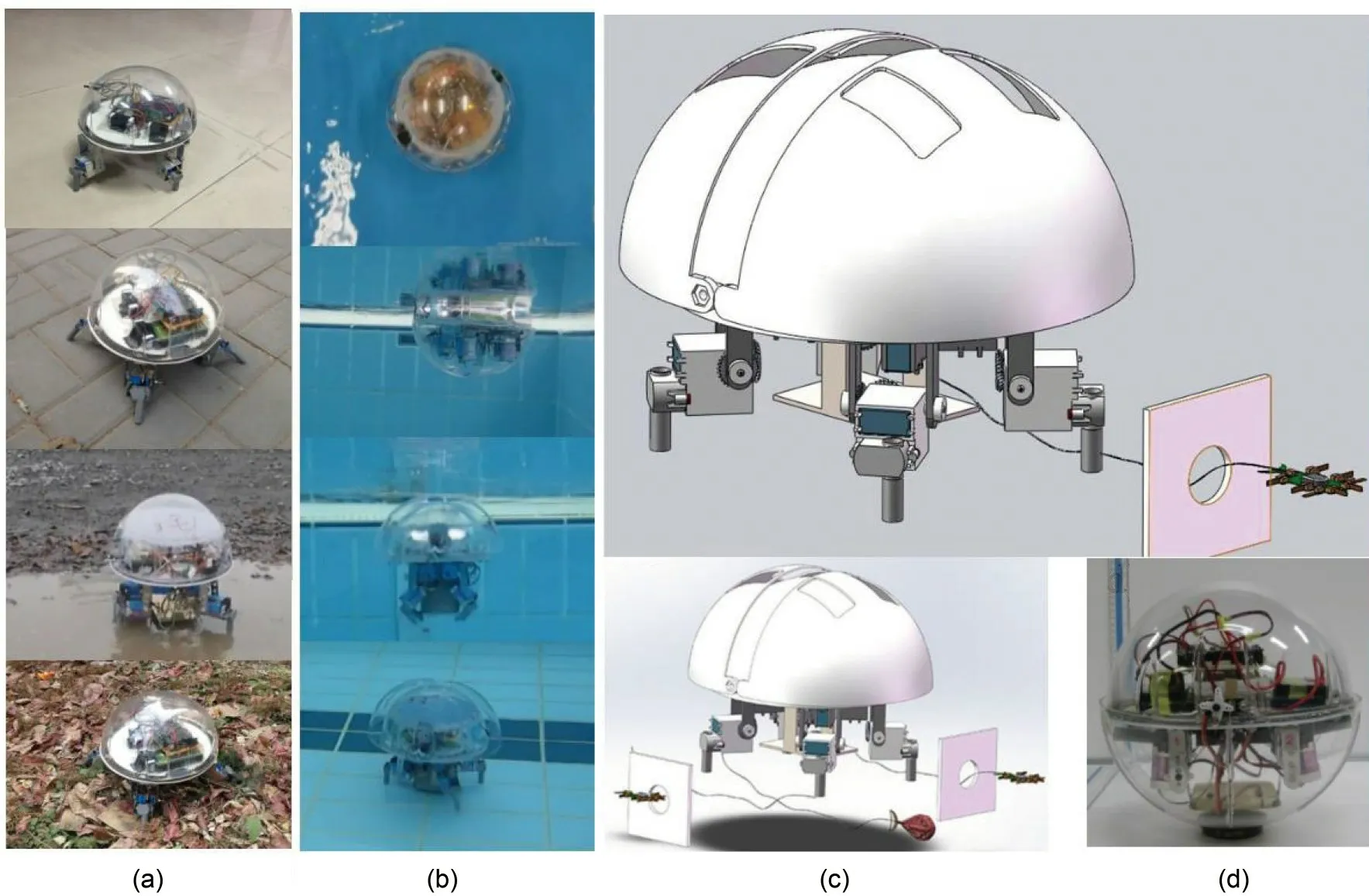
Fig.9 A parent-child robot system:(a) parent robot on land and in an amphibious environment;(b) parent robot in an underwater environment;(c)parent-child robot mode;(d)prototype of the parent robot.Reprinted from(He et al.,2016),Copyright 2015,with permission from Springer
5.6 Intelligence of bionic robots
5.6.1 Multi-machine cooperation
At present,most amphibious robots are used individually,and only a small proportion can be deployed as a cluster.Turtle-inspired spherical robots (Fig.9)use a parent-child robotic communication protocol that allows multiple child robots to work cooperatively.This kind of multi-robot system represents a promising direction for future development (Shi et al.,2013a;He et al.,2016),in which amphibious robots may form a squad and cooperate to complete complicated tasks.A cluster multi-robot system could feature a high level of cooperation,intelligence awareness,and multi-terrain/multi-task adaptability.
5.6.2 Multi-sensor and omnidirectional consciousness
Biology has excellent perception and decisionmaking systems.Through omnidirectional perception of the surrounding environment,including visual,auditory,taste,smell,and other sensory systems (Li et al.,2020),the input,control,and output of external information can be realized(Calisti et al.,2015;Sfakiotakis et al.,2015;Muriel and Cowen,2018;Paschal et al.,2019).Robots may make accurate screening and decision-making judgments based on this information from a central nervous system to adapt to multiple complex environments.For biomimetic robots,various sensors can transmit external multi-dimensional information to the inside of the robot according to a certain rule to satisfy the robot’s comprehensive decision-making.Excellent sensing technology can even detect information that humans cannot perceive.By combining the multi-sensing technologies,they can obtain multi-dimensional information of a complex external environment.Different types of sensors are usually required for robots to realize the surrounding environments and monitor their actions.The massive data collected by multi-sensor necessitates rapid filtering of the information,elimination of erroneous and redundant information,and analysis of the valid information to properly make the next decisions (Sun and Deng,2004).
For instance,the turtle-like spherical robot and the Naro-Tartaruga are equipped with contact sensors and vision tracking systems,and subsequently achieve remarkable capabilities for avoidance of obstacles and target tracking via the integration of the mass of data from the multi-sensor (Yang et al.,2001;Jiang and Li,2008).The bionic robot fish (Yang QH et al.,2007) is equipped with a visual sensor on the head to collect images controlled by its internal control system.The Crabster CR200 (Yoo et al.,2012) is equipped with an acoustic Doppler current profiler (ADCP,to detect the speed and direction of a water column current),sonar scanner,acoustic camera,attitude sensor,and light-emitting diode (LED) lamp.With the help of the sensor array,the robot can achieve an underwater forward-looking range of 100 m and a real-time sonar range of 10 m.Each foot is equipped with a contact force sensor to read terrain information.This amphibian robot can carry four operators internally.The robot monitors inner functions and outer surroundings using multi-sensor.Through the fusion of multi-sensor technology,the micro lobster-inspired robot (Shi et al.,2013b) can avoid obstacles,monitor targets,and realize simple handling functions.The Guardbot(Kaznov and Seeman,2010)has two cameras on each side of its body to provide image information.The RHex robot (Altendorfer et al.,2001) features a three-axis accelerometer and a three-axis fiber optic gyroscope to acquire position,attitude,and other data.It has good obstacle crossing ability,maneuverability,and adaptability.The AQUA (Dudek et al.,2007;German and Jenkin,2009;Speers et al.,2011;Dey et al.,2013) also has a vision system installed to monitor the surroundings by image recognition.The UrchinBot (Paschal et al.,2019) can communicate with the base by sending wireless information,and realize linear motion and rotational motion using its spines.The Whegs IV realizes self-localization,navigation,and information feedback by applying a navigation sensor and sonar simultaneously,which improves the robot’s ability to cross obstacles and effectively avoid collisions.Most ACM robots(Hirose and Yamada,2009)are equipped with contact sensors and partially equipped with visual sensors.Consequently,these robots have good obstacle crossing and collision avoidance abilities.In the BUR-001 (Ayers,2004;Paulson,2004) feedback information from sensors is used to better control obstacle avoidance and robot movement.
The continuous optimization and development of bionic sensors have gradually led to microminiaturization,self-healing,integration,multifunctionalization,multiple material applications,and multi-type sensor information fusion.These developments will enable a multi-dimensional perception system including hearing,smell,vision,and taste to be designed for bionic robots.This will further improve the accuracy and real-time decision-making performance of bionic robots.However,the current bionic sensing technology still has problems achieving accuracy,low time-consumption,stability,and multi-dimensional perception.Based on in-depth research of bionics and accurate analysis of bionic sensing mechanisms,combined with multi-disciplinary theories,studies of bionic sensing technology will achieve breakthroughs.In the future,bionic sensing will be closer to the biological senses or more biological(Li et al.,2020).
Table 4 Comparison of the performance of amphibious robots
(Table 4)
(Table 4)
(Table 4)
5.6.3 Multi-technology fusion of modern technologies
The flexible integration of new and conventional technologies may allow amphibious robots to achieve unprecedented adaptability,intelligence awareness,and multi-task compatibility.For example,the development of artificial intelligence technology,quantum computing,big data analysis technology,5G technology,and other advanced emerging technologies have inspired new research into amphibious robots (Lund,2004;Ladd et al.,2010;Andrews et al.,2014;Sandryhaila and Moura,2014;Li SC et al.,2018).
5.7 Novel energy sources
Driving energy is a key problem for robotic research(Lachs and Sutanto,1995;Shih et al.,2002).In terms of amphibious robots,it is necessary to consider not only the volume and mass of energy carried on land,but also the underwater pressure and water resistance during underwater movement.
From a macro perspective,based on the carrying capacity of an amphibious bionic robot and the space for the power supply,the energy source (power supply system) of amphibious robots needs to have the characteristics of high energy density,high charge and discharge power,and small mass-specific capacity.On the one hand,the energy supply of some robots,such as the UrchinBot (Paschal et al.,2019),comes from mobile power sources such as batteries,which results in a limited lifecycle(Phibbs and Lentz,2007).On the other hand,some non-mobile power sources,such as cabled DC power,compromise the operating range for an extended working duration(e.g.Crabster CR200).The PoseiDRONE (Arienti et al.,2013) has eight claws that are powered individually by cables for stretching or shortening.
From a micro perspective,improving the energy utilization rate is also an effective means to solve the energy supply problem of amphibious robots.The high energy consumption of a robot is related not only to its shape and structure,motion planning,or increased external load and speed,but also to its energy distribution method.This will cause the system to experience increased losses from heating,friction,and collisions,which will reduce the system’s energy utilization rate.The high energy consumption will become more prominent,and seriously restrict endurance.
Using new driving methods is an effective way to achieve energy-savings and extend endurance.On the one hand,based on the current combination of smart materials and bionic structures,there are good prospects for research on biomimicry of structures that integrate the materials,structure,and actuator of a biomimetic robot.At present,some bionic robots are still made from traditional materials such as steel and aluminum.By using bionic materials that are closer to biological performance,the driving efficiency and endurance capability of a bionic robot can be improved,and energy consumption reduced (Wang GB et al.,2015).On the other hand,the development of a life-like system that integrates the structure of bionic robots with biological materials may make the bionic robot more biological,achieving the goals of low energy consumption and long battery life.Satisfying both mobility and endurance requirements is still a bottleneck in the robotic field.With the development of new energy technologies,such as solar energy and wave energy (Wu et al.,2019),we believe this issue can certainly be addressed in the not-so-distant future.
5.8 Biomimicry evaluation
Facing the current diversity of biomimicry types,the evaluation of the level of biomimicry of amphibious robots is a basic need of research on bionic robots.A reliable method for evaluating the level of biomimicry could be used as a reference to improve bionic robots.At present,no systematic and accurate evaluation method has been proposed,and most current methods are subjective,so the evaluation results are not quantifiable.
To evaluate the level of biomimicry of amphibious robots,we propose a new evaluation method,the bionic similarity index measure (BSIM).This method compares the biological source organisms and amphibious robots based on their biomimicry of mechanisms,structure,and control,and then combines the results to give a comprehensive level of mimicry(Fig.10).
This evaluation system proposes a multi-level and multi-dimensional block evaluation strategy (Fig.10).It adopts a two-tier evaluation system:first-level evaluation,and second-level evaluation.First,the biomimicry types comparing the amphibious source organisms with the robots are classified under first-level evaluation,and then parts of the first-level evaluation are subdivided to form a second-level evaluation.Types of mimicry with only first-level evaluation are evaluated directly.For those types with a second-level evaluation,a second-level partial evaluation is performed first,and then a partial summary of the level is carried out.For example,when evaluating the biomimicry of a structural type,the second-level evaluation involving a partial evaluation of the biomimicry of the outline structure,propulsion methods,and the actuator is performed first.Then the number of fivepointed stars obtained from the second-level evaluation are combined to obtain the level of structural biomimicry.Finally,the comprehensive level of biomimicry of the amphibious robot is evaluated by calculating the number of first-level evaluation fivepointed stars.Each category of first-level evaluation has a total of three five-pointed stars to contribute to the ranking of the biomimicry level.The number of five-pointed stars represents the level of biomimicry of each category.The application of BSIM is shown in Table 5.
Results of analysis of the partial amphibious Turtle-inspired robot (17) show a higher comprehensive level of biomimicry than the Stingray-inspired robot (5),but the Stingray-inspired robot is superior in biomimicry of its materials.Therefore,the level of biomimicry of the biomimetic robot can be quantitatively evaluated using the BSIM.The measure serves as a reference for improving the comprehensive performance of bionic robots by ranking them according to their similarity to their natural source organisms.
6 Conclusions
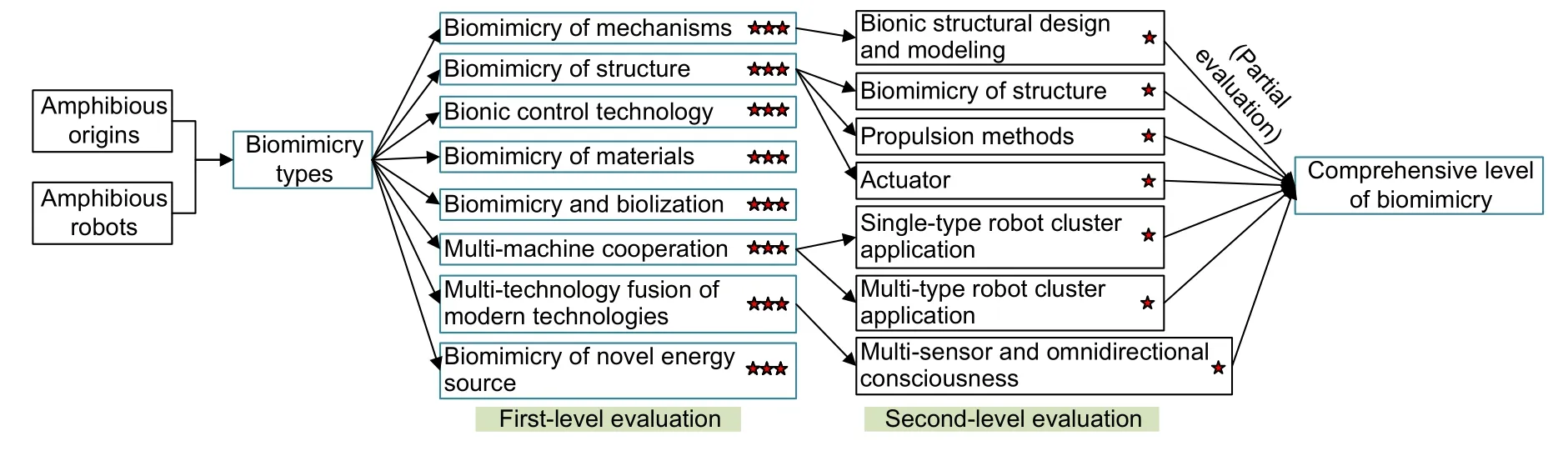
Fig.10 New method BSIM for evaluating mimicry.Rankings of biomimicry level from high to low are indicated by ★★★,★★,and ★
Amphibious robots will be widely used in daily life.They have outstanding performances and advantages in different application fields,especially in completing tasks difficult for the human.The summary and comparison of the reviewed robots from 13 different origins can guide the design and research of more complex future amphibious robots via biomimicry studies in terms of material,structure,and control mechanism.Different driving strategies can be adopted for the robots based on the moving principles of different organisms.Particularly,the summary of 10 different propulsion principles/modes reveals that the combined propulsion mode can significantly improve amphibious motion capabilities.
However,most existing biomimetic robots merely partially imitate the origins.In all cases,biomimicry is limited.Future work might focus on deeper biomimicry of the origins,deeper multi-technology fusion,and multi-machine cooperation we have reviewed here.
Future work may also need to tackle some concurrently bottlenecked technologies,such as cluster deployment capabilities,balance between mobility and endurance,multi-sensor with omnidirectional consciousness,and the integration with modern technologies like 5G,artificial intelligence,and big data.
With the above-mentioned issues addressed,future amphibious robots can have a higher level of biomimicry,improved cooperative efficiency,and increased terrain/task adaptability to better satisfy the ever-increasing demands in multiple fields.
Acknowledgments
This work is supported by the National Key R&D Program of China (No.2018YFC2001303),the Hunan Provincial Innovation Foundation for Postgraduate (No.CX20190030),the Innovation Research Foundation of the National University of Defense Technology (No.ZK19-33),and the International Postdoctoral Introduction Project Foundation,China.
Author contributions
Xiang-juan BAI wrote the draft of the manuscript.Jianzhong SHANG and Zi-rong LUO processed the corresponding data.Tao JIANG and Qian YIN helped to revise the paper.
Conflict of interest
Xiang-juan BAI,Jian-zhong SHANG,Zi-rong LUO,Tao JIANG,and Qian YIN declare that they have no conflict of interest.
 Journal of Zhejiang University-Science A(Applied Physics & Engineering)2022年3期
Journal of Zhejiang University-Science A(Applied Physics & Engineering)2022年3期
- Journal of Zhejiang University-Science A(Applied Physics & Engineering)的其它文章
- A comparison study between 2D and 3D slope stability analyses considering spatial soil variability
- Multi-objective aerodynamic shape optimization of a streamlined high-speed train using Kriging model