
机构养老设施空间定向性能参数研究
2022-03-22 15:13张泽锐卫大可
低温建筑技术 2022年2期
张泽锐,卫大可
(哈尔滨工业大学建筑学院,寒地城乡人居环境科学与技术工业和信息化部重点实验室,哈尔滨 150006)
0 引言
自主寻路对于维护老人的自我效能感、社交活动以及生活质量至关重要。然而,年龄上升带来的能力减退,尤其是罹患失智症,使寻路这一高度复杂的空间导航任务变得愈发困难,造成机构化照护依赖。因此,从建成环境设计的视角出发,探究老年人的空间定向支持问题具有重要的现实意义。
1 研究背景和目的
老人的定向障碍分为对时间、空间、人物和自身状况几大类[1],其空间定向障碍有着独特成因和表现。视觉功能和肢体、器官机能的减退,造成老人对长距离和大尺度空间寻路的不耐受性;认知损伤引发的记忆力、注意力和认知功能衰退,导致老年人执行寻路任务时多方面的缺陷:更加依赖视线可及的空间信息;多使用以自我为中心的寻路策略和点到点的寻路模式;难以进行基于记忆甚至推断的高阶决策,仅能完成基于明显的环境信息或日常行为的简单决策。
研究表明[2,3],对于环境适应能力较弱的失智老人而言,控制环境压力是促进其能力提升的重要举措,即使是处于病程中后期,他们也大都保留一定的空间定向能力,清晰合理的环境设计仍然可以支持他们自主完成某些寻路任务[4]。
然而,当前国内鲜有空间定向视角下的老年居住环境设计研究,国外针对环境空间定向性能的研究则缺乏定量化的研究结论,这使得我国老年建筑设计行业标准中尚未形成对失智单元在空间层面上的量化规定,致使大量工程实践忽略失智友好设计,建成环境往往与使用需求错位,甚至背道而驰。
文中基于对失智及有失智倾向老人的寻路行为的剖析,以机构养老设施照料单元平面为主要研究对象,希望达到如下目的:①确定机构养老设施空间定向性能目标,表征性能参数;②确定各参数下的具体考察维度,建构计算模型;③结合性能参数评价实际平面案例,阐明参数应用方法。同时,通过发展环境定量化考察工具,为机构养老设施单元平面的性能化设计及优化提供一种新的思路。
2 总体性能参数表征
2.1 空间定向性能目标确立
寻路行为是环境空间定向性能最基本的考察载体。寻路是指通过一个连续且循环的过程到达目的地的行为,分为决策制定、决策执行、空间信息处理和识别目的地几部分。其中,决策的制定与执行是在空间信息处理的基础上反复进行并不断修正的,识别目的地同样依赖空间信息处理[5]。可见,寻路时个体与环境不断互动,摄取清晰有效的空间信息并完成结构性加工对于成功寻路至关重要。
文中基于老人空间定向需求,结合文献循证整理空间定向相关环境影响要素及支持设计策略,综合确立了空间定向性能目标,其映射关系如图1。
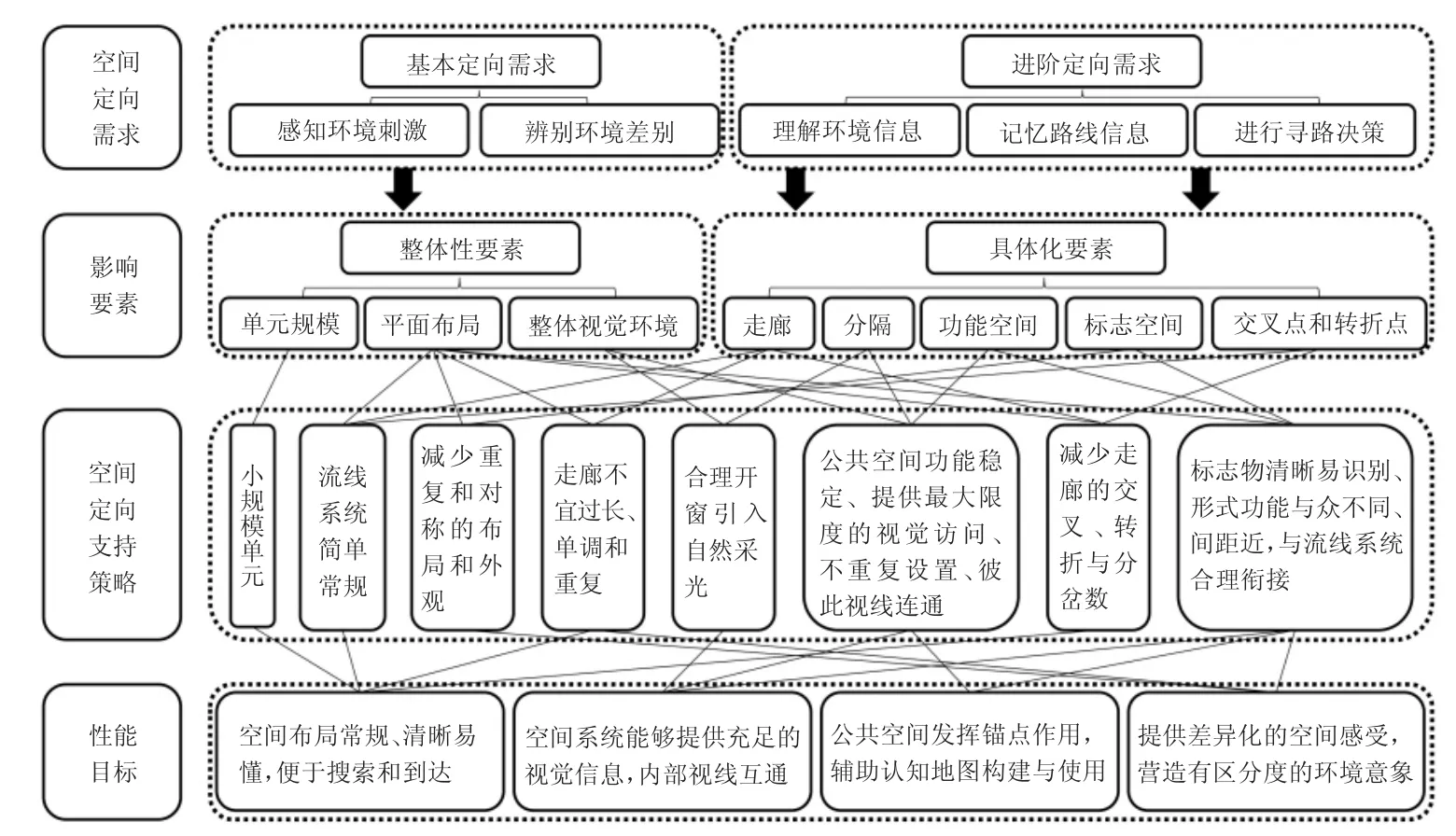
图1 性能目标确立映射关系
2.2 总体性能参数表征
基于既有研究成果[6,7],从性能目标出发,研究将空间定向性能参数表征:①空间可达性,衡量搜索与到达空间各个部分的难易程度;②空间可视性,衡量空间系统及重要区域及节点处的视觉开敞程度;③空间参照性,衡量参照空间能够多大程度地发挥参照作用;④空间异质性,衡量空间系统的不同部分的视觉异化程度。
3 指标定义与计算模型建构
3.1 空间句法理论的引入与研究指标分类
空间句法是用数理量化的方式呈现空间几何特征与人对空间的认知二者关系,进而辅助分析和评价空间环境的理论。研究引入了空间句法理论辅助计算模型建构,建立了句法参数与空间定向及寻路行为的关联性,探究了空间句法的空间定向属性。文中所涉及的指标分为系统值和目标值,前者考察整个空间系统,用于平面的整体评价和选型;后者考察部分,用于局部评价和针对性优化。
3.2 空间可达性
3.2.1 平面布局复杂性
该系统值用以考察寻路视角下单元平面流线和功能组织的复杂程度,是最为关键的空间定向性能指标。复杂性上升有两个内在原因:①空间组织关系复杂;②空间单元数量多。以往学者对于这一指标量化方式及其局限如表1 所示[8-11]。

表1 已有平面布局复杂性指标的量化方式及其局限
在此基础上,文中使用空间句法线段分析中各线段平均深度与长度系数(线段长/系统最长线段长)乘积的总和量化布局复杂性。平均深度能直接反应到达目标空间的难易程度,且适用跨系统比较。如图2 所示,相比轴线图,线段图分割空间的方式和对寻路决策的模拟更为精细。长度系数的引入充分考虑了尺度带来的复杂性贡献差异,这使得指标值更符合实际空间使用规律并贴近寻路视角。
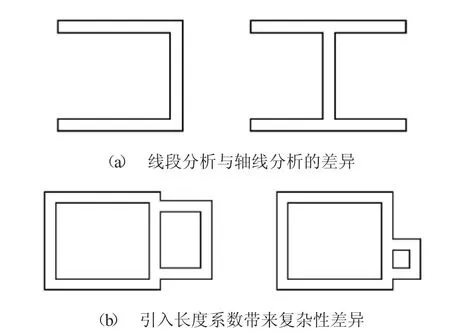
图2 线段分析与长度系数的作用
3.2.2 核心空间可达性
该目标值着重关注度量值(距离、角度)对行动力和认知能力受损老人的特殊影响。研究表明老人在寻路时更倾向于进入整合度较高(视线通达度高)的空间,进入核心空间的距离和转角成本越小,表明环境越支持寻路。
研究选取视线整合度加总值前10%~50%的节点集合定义为五级核心空间,选定核心空间的节点集合分别进行最短路径度量深度和最短路径角度深度计算,以核心空间以外的网格点集合的全局度量深度和角度深度的均值表征核心空间可达性。
3.3 空间可视性
3.3.1 系统互视率
该系统值用以考察任意节点对空间系统视觉掌握的平均水平,指标值为系统中各节点连接度占所有可能连接数比例的均值。将计算范围限定为交通空间,即得到交通空间互视率。
3.3.2 核心空间可视性
该目标值用以考察核心空间的视线通达程度。核心空间可视性同样分为五级,以可直接看到核心空间节点集合的节点数与系统节点总数的比值量化该指标。
3.3.3 决策可视效用
该系统值用以考察空间系统中的可视空间信息分布在多大程度上支持寻路决策。视觉聚合系数度量了在节点附近移动时视域变化的速率或视觉信息的稳定程度,数值越小意味着该位置越容易发生决策。文中以节点视线整合度值和视觉集聚系数的二次回归拟合优度作为决策可视效用指标值。
3.4 空间参照性
3.4.1 参照空间可视效用
该目标值用以考察在空间系统中起参照作用的空间多大程度地被视线直达,包含3个层次的内容:①覆盖度r1,系统中能视线直达参照空间的节点数占比;②可见度r2,视线直达参照空间的节点平均能够多大程度地看到参照空间(局域值),反映了参照空间的开敞程度;③参照空间在系统中的面积占比rs。r1和r2的乘积表示参照空间在全系统的可视性平均水平V0(参照空间可视性),V0与rs的乘积即为参照空间可视效用(VEoL)。当以上目标值的计算范围为所有参照空间的节点集合时,结果为系统值。该指标表达式如下:
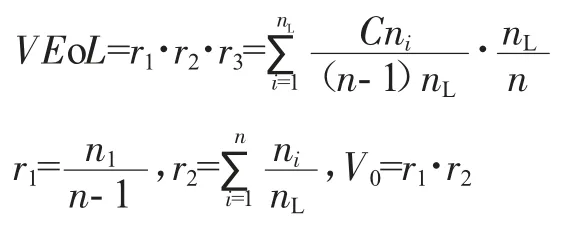
式中,Cni为第i个网格点的连接度值;n 为空间系统网格点总数;n1为目标参照空间一步视觉深度范围内的网格点总数;nL为目标参照空间的网格点总数;ni为目标参照空间一步视觉深度范围内第i个网格点可见的参照空间网格点数目。
3.4.2 参照空间系统性
该目标值用以考察参照空间之间的相互关系,进而衡量它们协同发挥作用的能力。参照空间系统性的考察分为互视度和间距两个方面。研究以目标参照空间与其它参照空间的平均互视性表示系统性的可视因素(SoL1),以目标参照空间与其它参照空间的平均距离表示系统性的距离因素(SoL2)。该目标值的加权平均值(均值)即为参照空间系统性的整体水平(系统值,OSoL),SoL2值可进一步标准化(除以一步视线深度覆盖面积)以排除实际服务范围和空间尺度两方面的影响。具体表达式:

式中,ni为第i个网格点(目标参照空间以外的参照空间网格点)可见目标参照空间网格点的数量;nr为目标参照空间以外的参照空间网格点总数;nL为目标参照空间的网格点总数;SoL1j为第j个参照空间的SoL1值;N 为第j个参照空间的栅格点总数;nAL为所有参照空间的网格点总数。
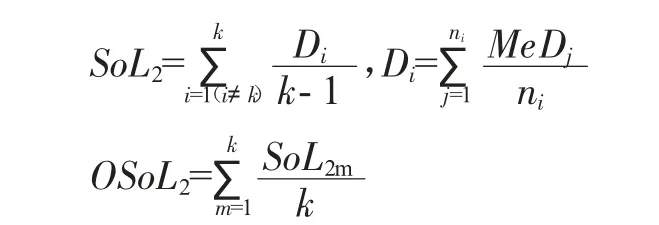
式中,Di为第i个参照空间网格点集合到所选参照空间的平均度量距离;MeDj为第i个参照空间中第j个网格点到所选参照空间的度量距离;SoL2m为第m个参照空间的SoL2值;k 为参照空间的数量;ni为第i个参照空间的网格点数量。
3.5 空间异质性
该目标值用于考察空间系统中不同观测点在视觉感受上的异化程度。文中以对视域的考察为落脚点,引入空间句法中视域面积和紧凑度这两个属性分别衡量视域在尺度和形状上的差异性。有两种基本的考察方法:第一种方法主要针对由岔路口不同方向相似视域带来的影响决策的同质性,分别考察面向各分岔方向的子视域单元(120°视线扫掠角)的差异性;第二种方法适用于相似布局带来的空间同质,例如无差别的走廊、重复纵列式单元布局或对称布局。研究以视域面积的和紧凑度的离散系数分别表示空间尺度和形状的异质性。
在视域形状尺度接近时,空间感受还受到观察点在视域中所处的位置和观察点到最邻近空间边界的距离的影响。据此,研究发展出另外两个辅助指标—观测位置异质性和视域最小半径异质性,分别采用视域游离度和最小半径的离散系数表示。
4 参数体系的验证应用
基于以上参数体系,文中以不同类型的单元平面为载体,通过分析指标计算结果,讨论它们在空间定向性能不同方面的优劣,为该参数体系在复杂建筑环境中的应用提供了示范。
4.1 分析样本的选取
平面样本选取遵循以下原则:①相对简单清晰,功能配置类似;②具有典型性和代表性;③考虑在布局上的差异化。如图3 所示,文中选取了包括《<老年人照料设施建筑设计标准>图示》(在编)中的平面示例和周燕珉工作室实际设计项目等在内共6个单元平面作为主要分析对象[12-14]。
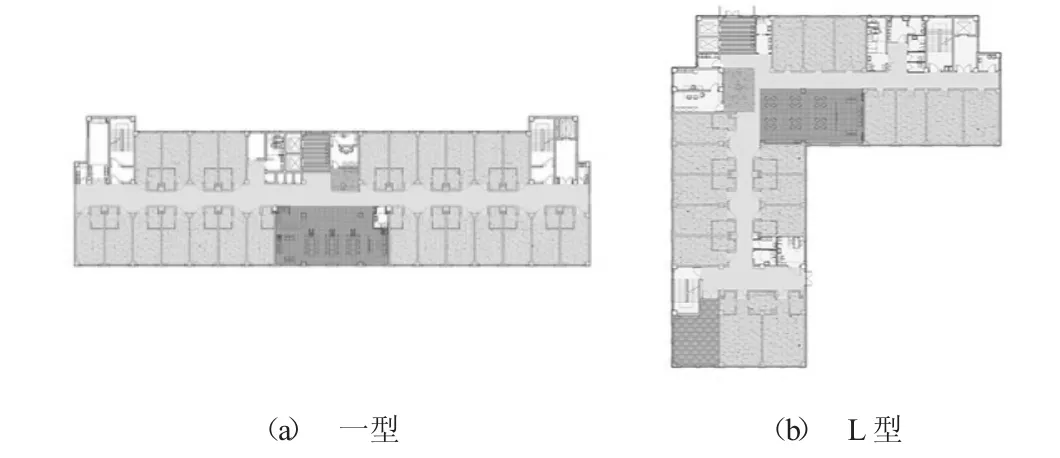

图3 考察样本平面及功能分区
4.2 空间可达性的分析评价
4.2.1 平面布局复杂性指标分析
如图4 所示,复杂性排序为一型<L 型<E 变型<回型<L 字型<环型,一型在空间数量和组织复杂性方面指数最低,环形平面极高的复杂性来源于曲线形走廊引发的空间单元数量剧增,带来大量转移于空间单元间的拓扑深度值。模型计算结果与既有实证研究结论基本吻合。

图4 平面布局复杂性计算结果
4.2.2 核心空间可达性指标分析
由图5 分析可知,回型布局的核心空间可达性最优,但其核心空间分散分布,任一处与全局空间视觉联系水平较低,因此对老人决策能力要求较高,不适合以失智老人为主体的照料环境。相比之下,一型的核心空间由块状到条状的集中分布方式更适合失智护理单元。
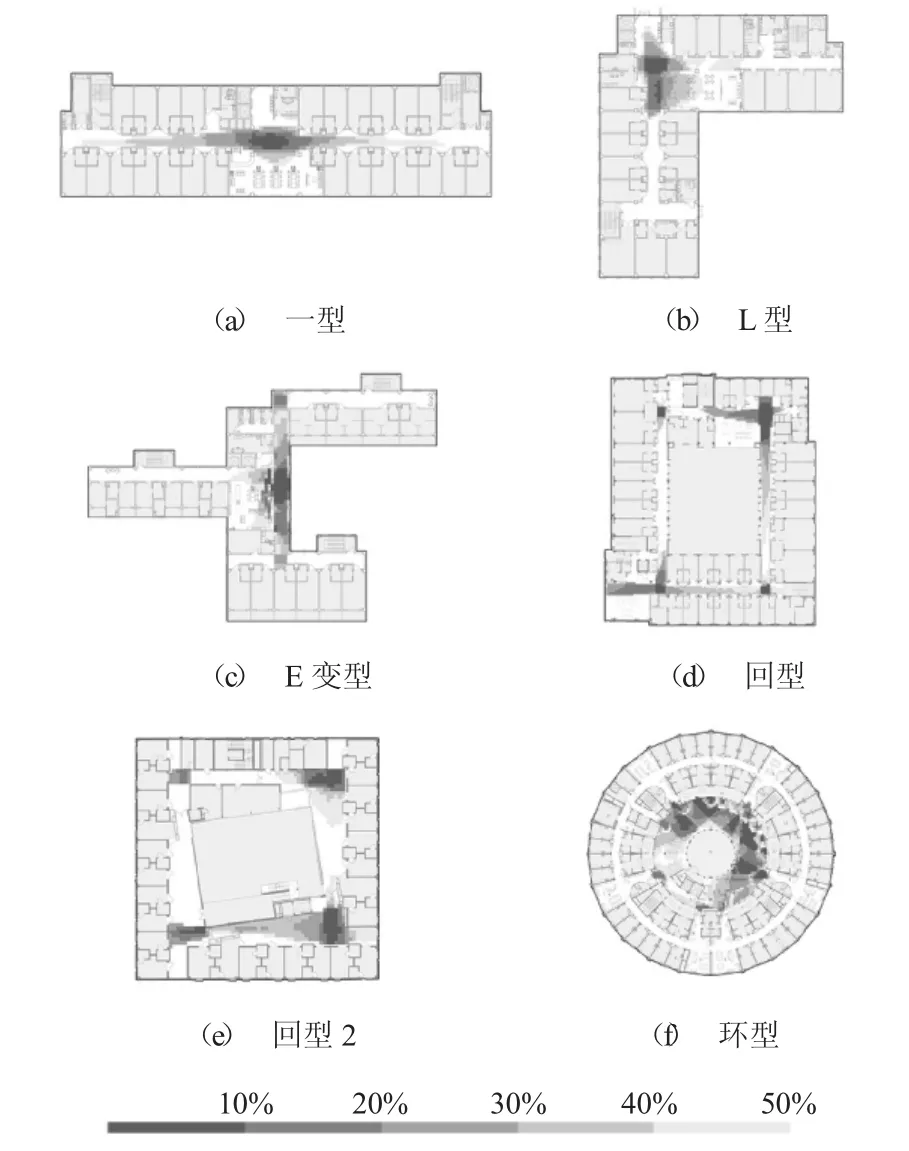
图5 各样本的五个等级核心空间分布图
结合图6 数据分析表明,环绕式中厅布局对于降低到达核心空间的距离成本有利,凹龛、分支短廊和曲线走廊是角度深度的主要来源;L 型和环型平面的折线图呈现降幅较小甚至不降反增的变化趋势,意味着核心空间呈块状过度集中分布,高整合度空间在一定程度上将低整合度空间孤立,寻路的距离和转向成本多集中于低整合度段,这将带来潜在的环境压力,因此在设计时应特别强化转折处,尤其是次转折点处的标识设置。
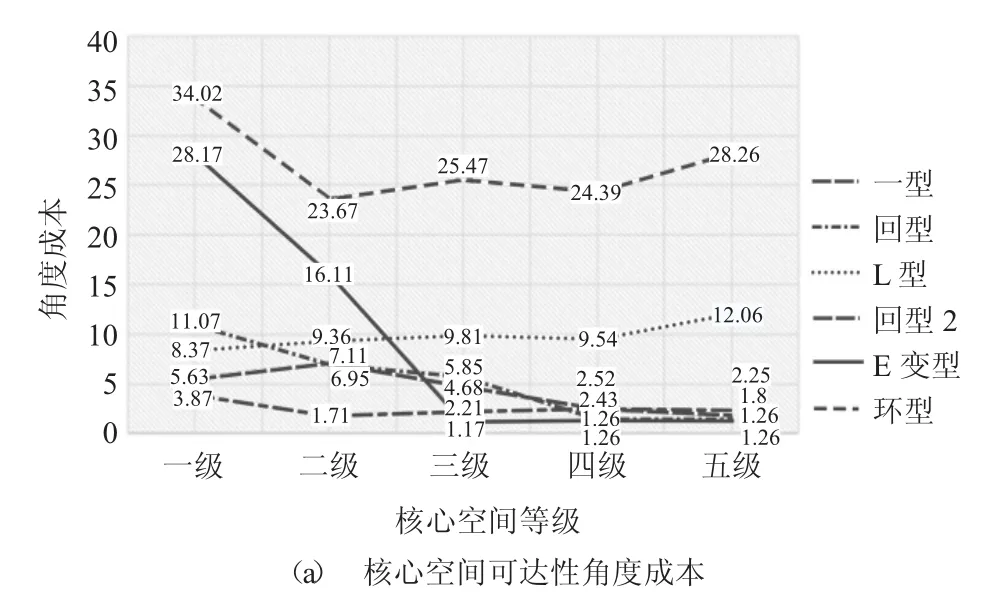
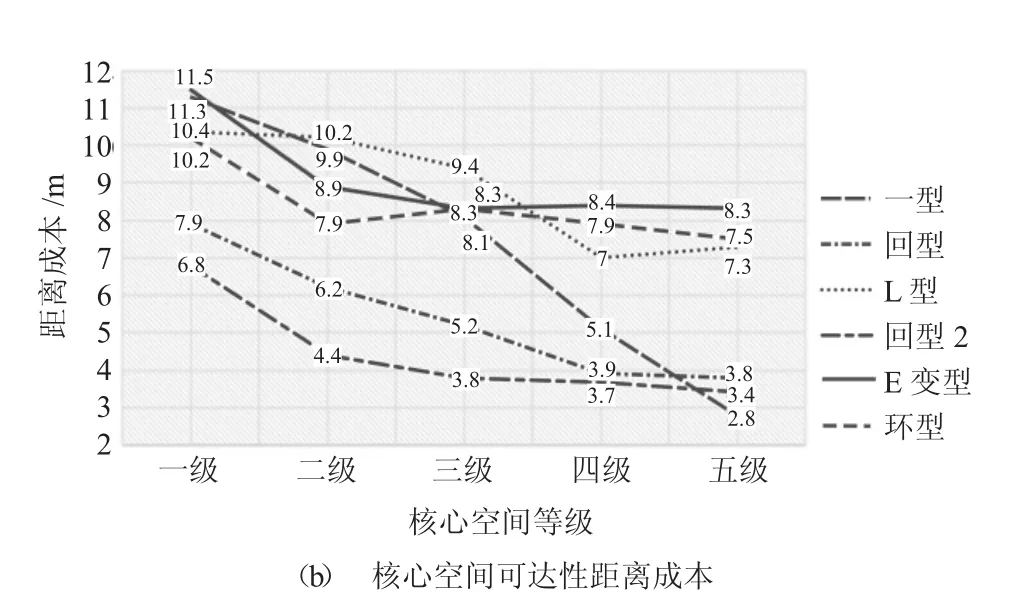
图6 核心空间可达性计算结果
4.3 空间可视性的分析评价
4.3.1 系统互视率指标分析
如图7 所示,计算结果较为反常的是无弯折的一型系统互视率略低于L 型。数据拆解后发现,一型走廊面积占比为49.29%(可视率34.52%),相比L 型41.86%(25.42%)更为优越,这表明无弯折的走廊布局在可视性上占据优势;但一型的中央公共空间面积占比为50.71%(50.40%),较L 型58.14%(56.65%)的指标值体现出劣势,这导致其系统互视率反而较低。仅计算交通空间的互视率后,一型在可视性方面的优越性得以体现,然而仅55%的指标值说明走廊凹龛对视线存在较强的遮挡。环型样本的规模较大,且曲线走廊严重遮挡视线,造成互视率仅有11%。
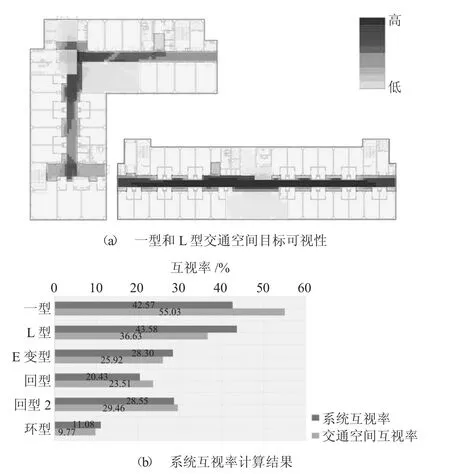
图7 系统互视率指标计算结果
4.3.2 核心空间可视性指标分析
如图8 所示,L 型的核心空间可视性水平随等级变化不敏感,这源于其核心空间随等级上升的扩张都紧贴在上一等级核心空间的外围,在覆盖的区域范围上并未有本质提升,这也造成了南侧走廊被视觉孤立。从可视性角度来看,整合核心分散布置优于集中条状,优于集中块状布置。回型2 相较于回型的优势表明,浅凹龛和宽净宽的搭配是一种既保证走廊顺畅通行,又在一定程度减少凹龛对可视性影响的设计方法。
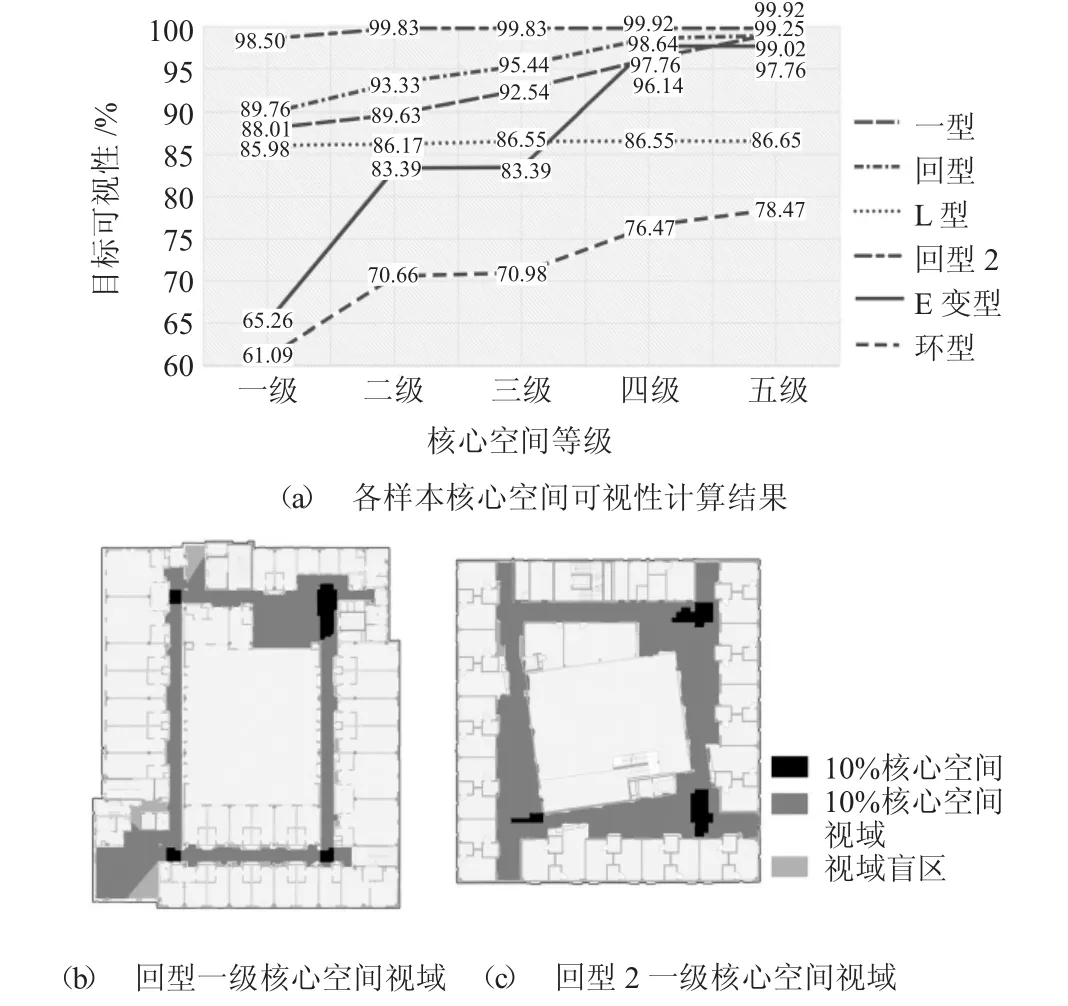
图8 核心空间可视性计算结果及图示
4.3.3 决策可视效用指标分析
如图9 所示,以L 型为例,其散点图底侧大量水平分布的数据点(南侧分走廊和走廊凹龛)和左下方大量低视觉聚合系数低整合度的数据点(北侧分走廊)不符合拟合曲线的整体走势,去掉这些网格点后,L 型布局的视觉可视效用得到了大幅度提升。
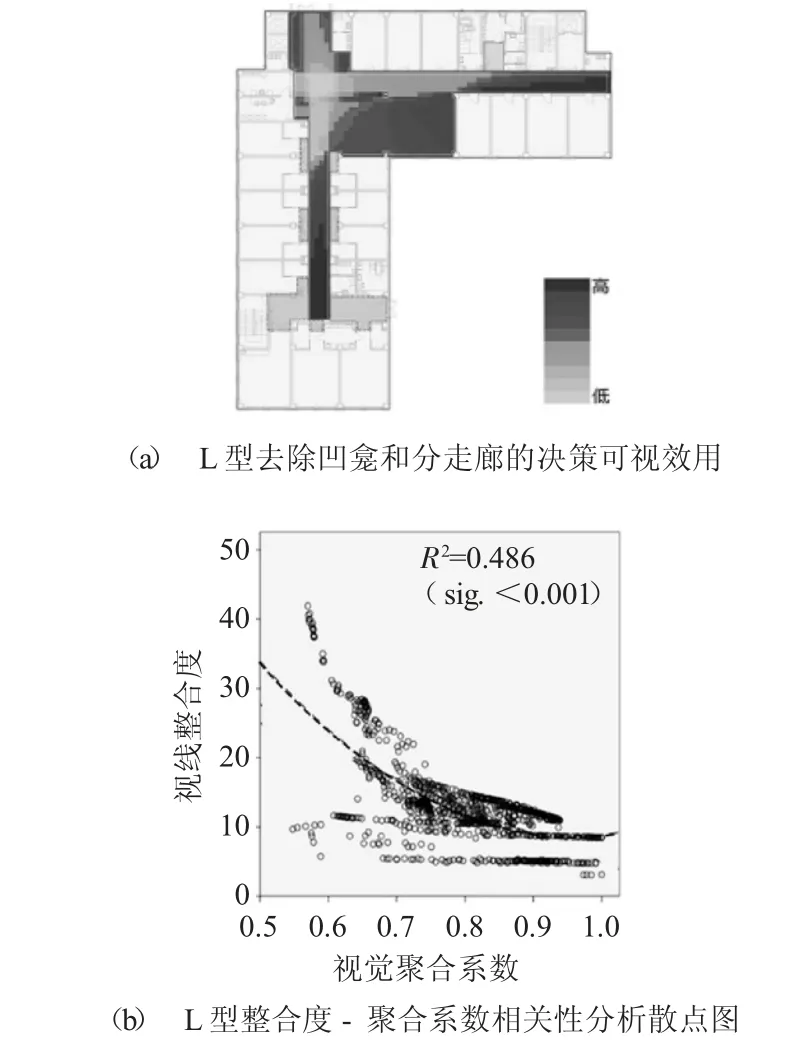
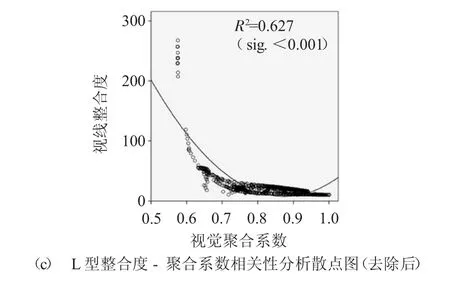
图9 L 型去除分走廊后的决策可视效用变化
进一步计算发现两个回型布局的差异也是由平面类似部位导致见图10,这表明小尺度走廊和凹龛是造成视觉可视效用降低的重要原因。
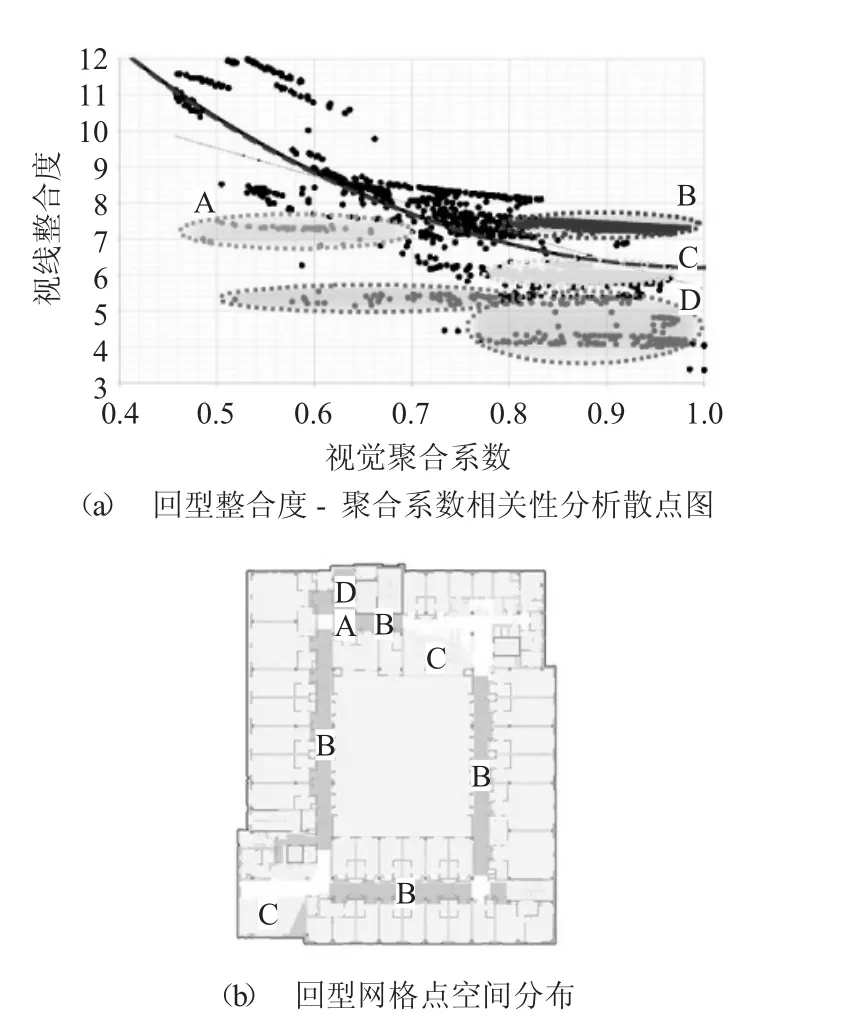
图10 影响回型决策可视效用的网格点空间分布示意
4.4 空间参照性的分析评价
4.4.1 参照空间可视效用指标分析
如图11 所示,以E 字变型为例,集中分布的参照空间在核心位置形成了大面积占比的开放空间,可视性水平V0较高,然而容易造成孤立区域(r1较低),在南北两侧添加两处参照空间后,视觉盲区减少,系统r1值大幅度提升,参照可视效用也获得提升。
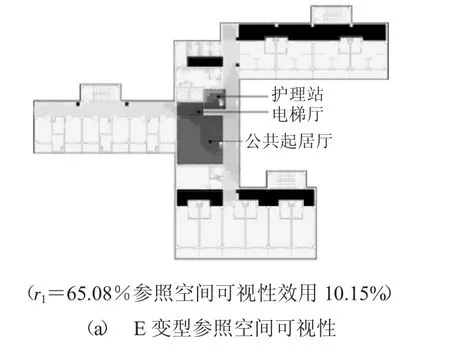

图11 E 变型优化前后参照空间可视性指标值变化
因此,参照空间的位置分布应协调好集中与分散的关系,大面积集中加小面积分散的布局形式较为理想。
4.4.2 参照空间系统性指标分析
如图12、图13 所示,参照空间系统性整体呈现中央集中分布优于分散分布,E 变型最优,回字型最差。然而,过于集中分布的参照空间也使E 变型的覆盖度(r1)和可达性均为最低。此外,由于各参照空间的一步视线深度范围的完全重合区域无需利用参照空间作为锚点,因此非完全重合区域才是参照空间的真实服务范围,E 变型的参照空间真实服务范围面积占比仅为10.2%。文中所提出的E 变型优化方案虽降低了其系统性,却大幅提升了真实服务范围。这表明参照空间的位置分布应统筹考虑系统性、可达性、覆盖度以及真实服务范围的平衡,以往文献中提出的一味集中布置参照空间的设计策略具有局限性。
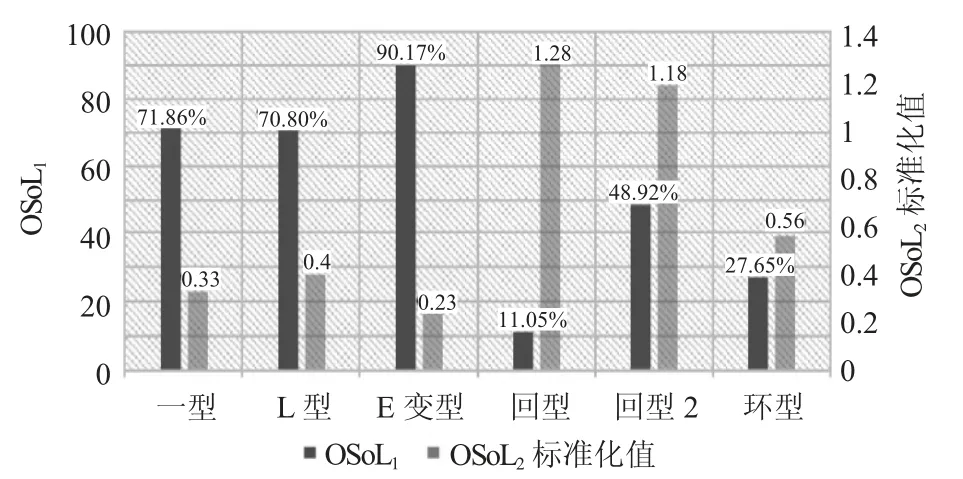
图12 参照空间系统性计算结果
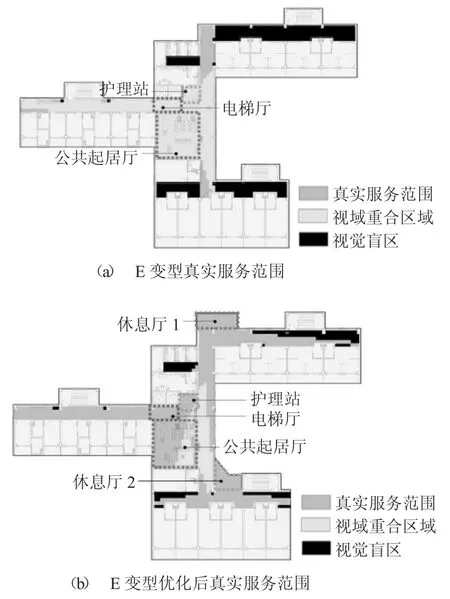
图13 E 变型优化前后真实服务范围变化
4.5 空间异质性的分析评价
如图14 和表2 所示,以一型样本为例,走廊(包括凹龛部分)观测点集合的视域形状和尺度非常接近,但观察位置指标差异较大,这意味着辨别居室时,自我定位的主要空间信息来源是与尽端或中心空间的相对位置,这对于远端几何信息敏感度较低的老人而言十分不利。两侧走廊对称位置的视域相似程度较高,误入走廊后难以获得差异化的空间信息主动纠错。而中心决策点两侧子视域的同质化程度也很高,表明这种高度同质化的一型平面存在较大的连续定向错乱隐患。
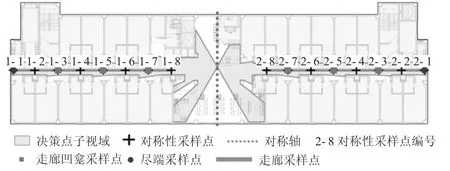
图14 空间异质性网格点采样方式

表2 一型空间异质性计算数据
5 结语
研究在文献梳理的基础上提出了与环境的空间定向性能相关的可达性、可视性、参照性以及异质性4个主要性能参数,建立了层次分明的性能参数指标体系,生成了对应计算模型。计算模型的分析效果明显,对于不同环境的数据变化敏感,计算结果与既有实证研究的结论也基本吻合。同时,结合多个平面样本,并在参数验证应用的基础上提出了针对照料单元的若干设计策略,失智单元应首选一型走廊布局,同时注意避免单调重复的空间外观,可在局部设置差异化的空间节点或在室内设计层面加以区分;走廊凹龛虽然利于减少开关居室门对通行的干扰,但不利于空间定向,浅凹龛搭配宽走廊是一种相对理想的解决方式;参照空间的位置分布应结合计算模型统筹考虑系统性、可达性、覆盖度以及真实服务范围等因素的平衡,建议采用大面积集中结合小面积分散的布局方式。
在新冠疫情防控大局下,进入国内养老设施开展失智老人寻路行为实验较为困难,使得进一步的实证研究受阻,参数的验证和评价值区间划定或将成为该研究下一步的深化方向。
猜你喜欢
体育科技(2022年2期)2022-11-07
社会科学战线(2022年8期)2022-10-25
幼儿教育·教育教学版(2020年8期)2020-12-23
幼儿教育·教育教学版(2020年8期)2020-12-23
幼儿教育·教育教学版(2020年8期)2020-12-23
冰雪运动(2020年1期)2020-08-24
武术研究(2020年2期)2020-04-21
中学生英语·外语教学与研究(2015年4期)2015-06-12
中学科技(2014年2期)2015-01-12
声屏世界(2014年8期)2014-02-28
