终端区多场景有人机/无人机空中碰撞风险研究
2022-03-17 07:11张恩宇
西华大学学报(自然科学版) 2022年2期
韩 鹏,周 斌,张恩宇
(1.中国民航大学空中交通管理学院,天津 300300;2.北京航空航天大学电子信息工程学院,北京 100191)
随着无人机行业的发展以及消费级无人机的普及,由此带来了许多无人机扰航事件。国内外均出现过由于无人机黑飞导致的几十架次航班延误或备降事件。预计到2025 年,全球无人机市场规模将达到428 亿美元[1]。无人机数量的急剧增加,如果不能通过恰当的途径降低无人机对有人机运行安全的影响,将增加航空运输风险。终端区内有人机运行高度较低,更容易与低空空域飞行的无人机发生碰撞,以此场景为基础,研究有人机与无人机碰撞风险对评估运行安全具有重要意义。
国内外学者对有人机之间的碰撞风险已有广泛研究。Reich[2]建立北大西洋上空航路飞行航空器纵向、侧向、垂直方向的碰撞风险评估模型,成为航空器碰撞风险评估的经典模型。Endoh[3]利用气体分子模型评估航空器间的碰撞概率,气体模型被扩展到一个广义的形式,可以提供有人机方向和有人机速度大小的任何概率分布的碰撞率的估计。应爱玲等[4]基于REICH 模型对北大西洋平行航路侧向碰撞风险进行研究,通过代数计算认为REICH 模型可以进行空域的安全评估,但数据选取困难,不同空域安全标准还需要根据不同的大量数据另外进行分析。Brooker[5]针对REICH 模型存在的需要对3 个方向进行建模、参数含义不清晰等问题,提出了“Post-REICH 模型”,即EVENT 模型。此外该模型更加具体直接,适用于更复杂的情况。徐肖豪等[6]将EVENT 模型中长方体碰撞模板改为圆柱体,并通过仿真证明改进的碰撞模型更加精确。张勇等[7]通过研究航空器速度分布,在Reich 模型的基础上得到同一航路上两有人机间的一般纵向碰撞概率模型。
近年来,研究人员逐渐关注有人机与无人机碰撞风险。高扬等[8]基于Reich 模型对通用航空器和有人机进行处理,并结合有人机飞行特点以及人、机、环、管构建的混联系统的可靠度,对终端区内通用航空器与有人机的碰撞风险进行了评估。邓力[9]把无人机与有人机的相对运动分为水平与垂直两个方面,基于布朗运动的特点计算无人机与有人机在两个面内的相对距离,从而判断碰撞风险。杨敏[10]通过对航空器3 个方向进行间隔判断,从定位导航误差的角度求有人机与无人机应保持的最小安全间隔,但仅限一架无人机与一架有人机的情况。Zhang 等[11]也长期跟踪无人机运行,并提出无人机地面撞击风险。
无人机通常运行在1000m 及以下的低空空域,终端区内更容易出现无人机与有人机的飞行冲突,终端区内有人机与无人机碰撞风险是无人机融入现有空域难度最大的区域[12−15]。此外适用于有人机之间的碰撞模型如Reich 模型等,由于运行数据的缺失,尚不适用于解决现有问题。本文研究了在终端区3 种场景下无人机与有人机的碰撞风险,并提出改进碰撞模型,评估碰撞风险。
文章结构概述如下:第1 部分分析终端区内无人机与有人机混合运行的具体场景;第2 部分分别介绍3 类冲突场景碰撞风险评估模型;第3 部分对模型进行了算例分析。
1 终端区内无人机/有人机冲突场景分析
终端区是以机场为中心、以约10km 的半径范围向上延伸成的圆形空域。海洋空域是国际空域,范围在海岸线83~185km 以内,最远不超过185km,从海平面以上600~1500m 起向上延伸。大陆上空还可根据需要划分为禁飞空域、限制空域和飞行训练空域等。
在终端区内有人机的飞行活动按航行目的大致可分为进离场、巡航和目视飞行3 种。其中有人机进离场的飞行特点为飞行活动中达到的最高高度较低,飞行方向、起始高度和速度变化较大,但会沿着规定的飞行程序飞行;有人机巡航的特点为飞行高度较高,一般会达到万米左右的高度,飞行方向、高度和速度较为固定,沿着特定的航路飞行;目视飞行最为特殊,在满足目视飞行规则的条件下,有人机可以在本场按目视飞行规则飞行,不再受到航路或飞行程序的特定路线限制,飞行活动十分灵活,可以认为是自由飞行。取天津机场某日12 时至13 时的ADS-B 数据,对其中有人机数据进行处理,得到下面的图像(见图1)。
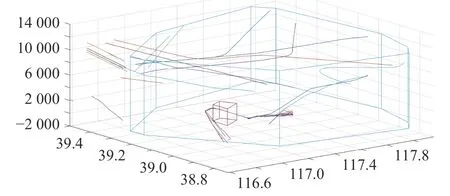
图1 天津机场终端区
与有人机不同,无人机在终端区的飞行活动可分为在航路上飞行和自由飞行。其中在航路飞行的无人机指中大型无人机,在航路中和有人机需遵守相同的规则,两者飞行特点一致。自由飞行的无人机指小型无人机,飞行高度上限较低,可能对处于起落或自由飞行状态的有人机产生影响。
由此可归纳出终端区内无人机和有人机可能碰撞的3 种场景:1)有人机和无人机均在航路上飞行;2)有人机目视飞行,无人机自由飞行,可视为有人机与无人机均自由飞行;3)有人机执行标准仪表进离场程序,无人机自由飞行。
2 终端区内无人机与有人机混合运行场景分析
2.1 无人机与有人机在航路飞行碰撞风险分析
有人机与中大型无人机均在航路运行的情况下,分析两者的碰撞风险时可等效为两架有人机的碰撞风险分析,分析有人机在航路的碰撞风险可采用Reich 模型[1]。
Reich 模型在研究航路上航空器间碰撞概率时需要使用大量的统计数据,比如两航空器临近的飞行时间,但是无人机刚兴起,这方面的统计数据很少;因此,利用经典Reich 模型进行处理很困难。所以就从概率的角度计算航路上无人机与飞机间的碰撞概率。
在终端区内有人机依靠PBN 导航定位,无人机依靠GPS 导航定位,考虑到两种定位方式的精度标准,假设两者的定位误差符合正态分布,则两者的碰撞概率为

式中:λx为碰撞盒尺寸,数值上等于无人机尺寸加航空器尺寸;δ,δu分别为航空器和无人机定位误差的标准差;dx为无人机与航空器间的测量距离。
2.2 无人机与有人机自由飞行的碰撞风险
另一种用来分析航空器碰撞风险的著名模型是气体模型。相较于在航路上航空器运动状态较为固定,自由飞行状态的航空器更类似于气体分子不规则的运动,可以利用气体模型分析无人机与有人机自由飞行的碰撞风险[2]。
将航空器视为气体分子,假设N架航空器在底面积为A,高度为H的空域内飞行。航空器不仅可以水平运动,也可以垂直运动。每架航空器用直径为g,高度为h的圆柱体表示,碰撞的发生相当于一架航空器的中心进入另一架航空器的圆柱体,该圆柱体的长度是原来的两倍,体积是原来的8 倍。
假设航空器速度大小不变,方向改变,无人机与有人机的碰撞概率为:

其中:R为 终端区半径;ρ1为终端区内有人机密度;ρ2为终端区内无人机密度;g1为有人机半径;g2为无人机半径;h1为有人机半径;h2为无人机半径;V¯rh为两者相对速度;H为终端区高度。
2.3 起落有人机与自由飞行无人机碰撞风险分析
在实际情况下,有人机在进离场过程中执行标准仪表进离场程序,按照特定的航路飞行。在已知有人机进离场时刻的情况下,可以推断出其4D 航迹(见图2)。假设终端区内存在一定数量的无人机,无人机随机分布,按照固定的方向和速度飞行,其4D 航迹已经确定。通过判断每个时刻有人机与无人机的航迹是否发生重叠,可以判断是否发生碰撞,通过蒙特卡洛法进行多次实验,得到有人机与无人机的碰撞概率。

图2 改进碰撞模型
使用如下方法进行有人机与无人机间碰撞概率的计算。首先对无人机和有人机进行处理,处理的方法参照Reich 模型中处理的方法,将无人机视作质点,在航空器周围建立以无人机和有人机尺寸之和的二分之一为半径r的球体空间。这个球体空间可以看作是模型的碰撞盒。那么,无人机与有人机间的碰撞可以看质点接触或进入球体空间。
在计算无人机和有人机碰撞风险前,根据四维航迹判断无人机与有人机间是否会发生碰撞。计算中,假设进离场航空器按照一定时间间隔飞行,无人机在终端区内按照预设的密度随机分布,其后续航迹也随机生成。
利用蒙特卡洛法,按照固定密度在终端区内生成特定数量的无人机,其初始位置、速度方向随机,根据4D 航迹冲突统计碰撞次数,计算流程如图3 所示。
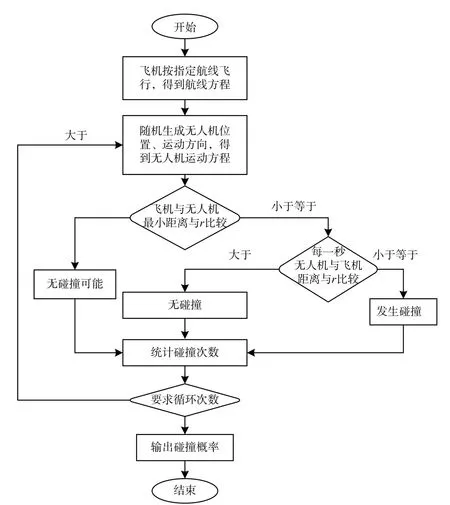
图3 改进碰撞模型
2.4 算例分析
采用天津机场的真实环境和航班数据对模型进行实例验证。天津机场用于日常使用的共有2 条跑道,标号分别为16R、34L、16L、34R,为简单处理,只考虑16R 号跑道的进近、离场程序。但1 条跑道有多个进近、离场程序,这里使用ZBTJ-9C 离场程序中KALBA-01D Departure 程序和ZBTJ-10A 进近程序。以16R 跑道入口点作为坐标系原点,以航空器起飞方向为x轴方向,垂直于地面作为z轴,以垂直跑道向左的方向作为y轴。这样跑道入口点的三维坐标可以表示为(0,0,0),ZBTJ-10A 进近程序中FAF点的坐标为(−11100,0,600),IF(−15200,0,600),IAF(4500,15296,600),ZBTJ-9C 中D6.0TJK(15551,16458,1200),D38TAJ(49763,49763,2700)。假设航空器飞行沿着这几个点飞行,飞行过程不考虑转弯半径。
为取整计算,第1 段D38TAJ-D6.0TJK 飞行时间为480s,第2 段D6.0TJK-IAF 飞行时间为120s,第3 段IAF-IF 飞行时间为250s,第4 段IF-FAF飞行时间为41s,第5 段FAF-机场入口点飞行时间为120s,这样的假设满足有人机飞行速度在100 m/s 左右。为满足2min 有人机进场的间隔,增加68 个在原点的点,使得总时间长度为18min。
假设无人机的速度为20m/s,碰撞盒的尺寸为85m。每次循环随机生成106 架无人机,进行次仿真,取这10 次仿真结果的平均值为这106 架无人机的碰撞概率,再除以106,得到每架无人机的碰撞概率,最后结果为1×10−7。
3 结果与结论
对于大型无人机与有人机在同一航路上飞行时,当RNP 精度为2 海里,GPS 精度为1.5m 时,无人机与有人机间需保持大约8330m 的间隔才能满足ICAO 规定的终端区内10−7的安全等级。
当目视飞行的有人机巡航速度在850km/h 左右,无人机巡航速度在60km/h 左右,并且无人机与有人机数量乘积为60,碰撞概率的数量级在10−8,根据碰撞概率的推导公式,当无人机速度与有人机速度一定时,相对速度为定值,那么碰撞概率与无人机有人机数量乘积成正比,因此当无人机与有人机数量乘积为700 左右,两者的碰撞概率满足ICAO 规定的终端区内的安全等级。
改进碰撞模型反映出有人机进场或离场,无人机自由飞行这一实际情况。并且在仿真算例模拟的条件下:有人机沿ZBTJ-10A 进近程序中FAF,IF(−15200,0,600),IAF,ZBTJ-9C 中D6.0TJK,D38TAJ 这几个点飞行时,有人机与有人机间进场间隔为两分钟,无人机的飞行速度为20m/s,无人机与有人机间能够保持ICAO 规定的安全等级。在终端区内无人机与有人机存在碰撞风险的场景有3 种,文中对3 种场景分别进行分析。对于无人机与有人机在航路飞行的碰撞风险分析运用了Reich 模型,对于无人机与有人机自由飞行的碰撞风险分析运用了气体模型,对于起落飞行的有人机与自由飞行无人机的碰撞风险提出了改进碰撞模型,并进行了数据检验,得出实验结果。
猜你喜欢
中国海事(2022年9期)2022-10-21
北京航空航天大学学报(2022年5期)2022-06-06
科技信息·学术版(2021年1期)2021-12-17
科学与财富(2021年33期)2021-05-10
航空维修与工程(2021年1期)2021-04-12
无人机(2020年1期)2020-07-20
智族GQ(2019年9期)2019-10-28
新闻前哨(2019年6期)2019-09-10
航海(2018年6期)2018-12-06
无人机(2018年2期)2018-09-10