
基于分布式光纤的隧道振动监测系统试验研究
2022-03-16 12:33张浩
高速铁路技术 2022年1期
张 浩
(中国铁路设计集团有限公司, 天津 300308)
近些年,我国隧道与地下工程发展迅速,已跻身国际先进行列[1-2]。但随着隧道运营数量及运营年限的增加,隧道突发事故不断对隧道的运营安全提出挑战[3-6]。为此,国内很多隧道工程设置了运营期自动化监测系统。广州地铁黄沙站隧道设置了全站仪+自动监测软件的运营期隧道监测系统,解决了多目标干扰、地基振动等技术难题[7];厦门翔安海底隧道通过预埋光纤光栅传感器,对运营期二衬变形进行自动化监测,结果表明隧道结构有较大的安全储备[8];赣皖公路隧道采用基于分布式光纤技术的火灾预警系统,用于运营期火灾信号的感知与预警[9];川黔线受滑坡影响较为严重的明洞结构,采用基于传统点式电信号传感器的远程实时监测系统,对围岩压力、结构内力等进行实时监测评估,系统实测分布规律与实际情况基本相符[10]。
综上可知,目前,对于隧道结构的自动化监测多集中在公路隧道,而铁路隧道实施运营期自动化监测的工程相对较少,且多为试验、科研性质的,仍处于发展初期。随着高速铁路的飞速发展,研究一套可用于高速铁路隧道结构内力、沉降变形、异常侵入等综合形位感测的系统意义重大[11-12]。
本文基于京雄高速铁路隧道光纤振动监测系统,通过对钻机打孔、挖掘机铲土、工程车辆行驶、隧道内落石等振动事件进行模拟,全方面评估该监测系统的采集灵敏度和精度,以期为该振动监测系统在运营期的应用提供试验数据支撑。
1 隧道振动监测系统简介
1.1 隧道工程概况
京雄高速铁路机场隧道为与机场地下站首尾相连的两段地下区间隧道。其中1号隧道全长 2 200 m,速度目标值为250 km/h,整座隧道位于北京市大兴区范围内;2号隧道全长 8 388.651 m,位于北京市大兴区范围 6 238.651 m,位于河北省廊坊市固安县范围 2 150 m,速度目标值为350 km/h。隧道设计为单洞双线隧道,线间距5 m,全线采用明挖法施工,拱形明洞结构,如图1所示。
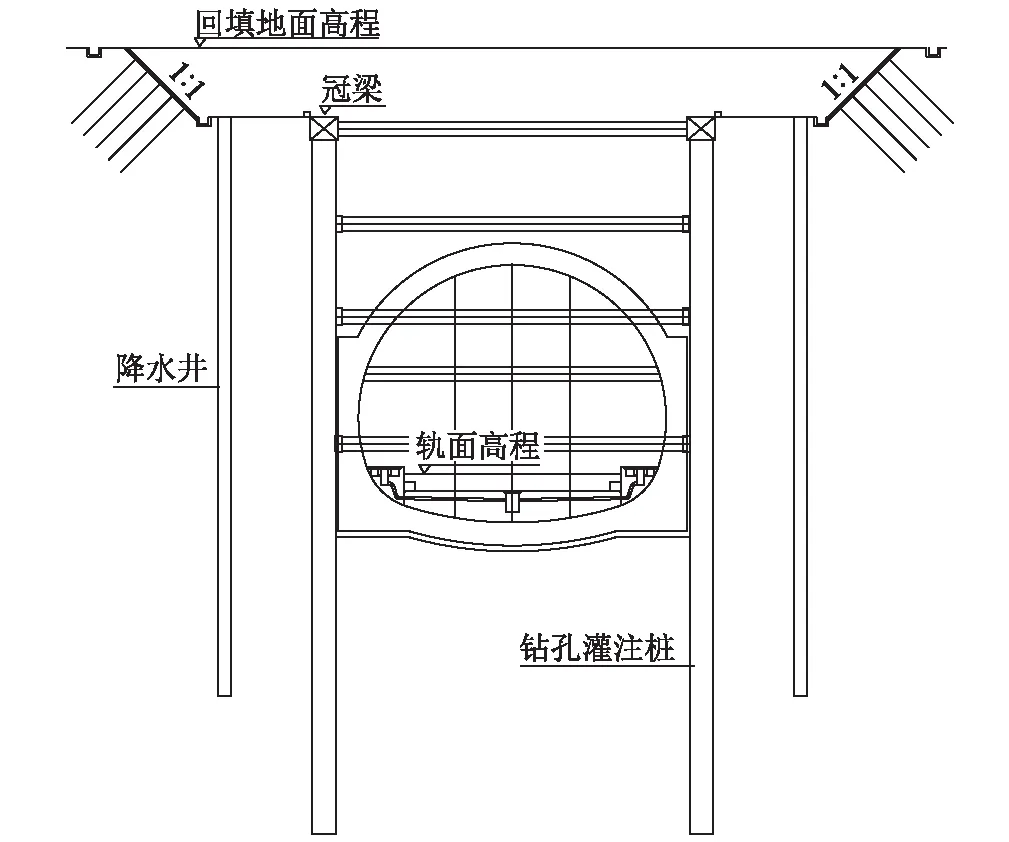
图1 隧道主体结构、围护结构示意图
1.2 振动监测系统概况
隧道振动监测系统由振动感测光缆、分布式振动解调仪和相关软件构成,在中央排水沟侧槽内和拱顶外侧混凝土保护层外分别沿隧道纵向通长布置1条振动感测光缆,布设长度为7 208 m。拱顶外侧光缆在隧道拱顶防水板及保护层施作完成后,通过水泥砂浆固定并保护于隧顶细石混凝土保护层外侧。沟槽内光缆在中央水沟浇筑完成后一次性布设,如图2、图3所示。

图2 振动监测系统平面布置图

图3 振动感测光缆安装示意图
振动监测光缆采用振动增敏光纤光缆,由着色光纤、防水油膏、PBT束管、钢带铠装层、加强件及护套组成,如图4所示。光缆具有优良的机械性能和热稳定性能,防鼠咬,防刀割,防水防潮,防紫外线,适合各种恶劣的使用环境。光缆性能参数如表1所示。

图4 振动感测光缆示意图

表1 振动感测光缆性能参数表
光纤分布式振动解调仪具有高灵敏度,耐水、耐高温、耐腐蚀、抗电磁干扰能力强、高疲劳性能、性能稳定、耐久性强等优点,能够实时收集光缆线路上每一点的振动信息,并提供精准定位,配合专业的模式识别软件,能对振动事件进行分类预警预报。分布式振动解调仪性能参数如表2所示。

表2 分布式振动解调仪性能指标参数表
2 现场试验
2.1 钻机打孔试验
根据沿光缆径向到采集设备的距离将钻孔分为远、中、近3组,每组距离光纤垂向距离0 m、3 m、6 m、9 m、15 m依次重复打孔操作,每个位置重复5次,孔深约50 cm。
以距离光缆垂向距离3 m的钻机打孔数据为例,钻机打孔和背景噪声的时域波形和短时傅里叶对比如图5所示。

图5 钻机位置和背景噪声时域波形和短时傅里叶对比图
在时域波形图上能明显分辨出钻机打孔事件。从短时谱上可以看出,背景噪声主要集中在10 Hz以下,钻机打孔事件的频率范围约在60 Hz以下。
2.2 挖掘机铲土试验
根据沿光缆径向到采集设备的距离将挖掘机铲土测点分为远、中、近3组,每组距离光纤垂向距离0 m、3 m、6 m、9 m、15 m依次重复挖掘操作,每个位置重复5次,挖掘深度约50 cm。
以距离光缆垂向距离3 m的挖掘机铲土数据为例,挖掘机铲土和背景噪声的时域波形和短时傅里叶对比如图6所示。在时域波形图上能明显分辨出挖掘机铲土事件的5次动作。从短时谱图上可以看出,背景噪声主要集中在10 Hz以下,挖掘机铲土事件的频率范围约在40 Hz以下。

图6 挖土位置和背景噪声时域波形和短时傅里叶对比图
挖掘机铲土动作和无铲土动作的相位数据波形幅度和频率对比结果如图7所示。从图7可以看出:铲土动作的波形幅度主要在40弧度以内,无铲土动作的波形幅度主要在5弧度以内;短时谱图上可见,铲土动作的频率主要集中在40 Hz以下,无铲土动作的频率主要集中在25 Hz左右。结果对比明显,因此,可考虑将发动机的主频率值作为特征进行后续车辆类型的识别。

图7 有无铲土动作波形幅度和频率对比(局部放大)图
2.3 工程车辆行驶
本项试验中,所用工程车辆均在光缆覆土厚度<2 m的区域内,分别在距离光纤垂向距离0 m、3 m、6 m、9 m、15 m处来回行驶,每个位置来回匀速行驶5次。
以距离光缆垂向距离0 m的工程车辆行驶数据为例,工程车辆行驶和背景噪声的时域波形和短时傅里叶对比如图8所示。在时域波形图上能明显分辨出工程车辆行驶事件;从短时傅里叶图上可以看出,背景噪声主要集中在10 Hz以下,工程车辆行驶事件的频率范围约在50 Hz以下。

图8 车辆行驶和背景噪声时域波形和短时傅里叶对比图
2.4 隧道内落石
本次试验所用光缆平行于排水沟铺设在地表,光缆未使用其他方法增加与地面的耦合。试验中所用落石重量小于0.5 kg,分别从有光缆侧和无光缆侧施工平台(高度7 m)自由落体,每个位置重复试验5次。
(1)距光缆2.5 m处(隔排水沟)
对第一次落石事件进行局部放大,落石冲击信号的时域波形和短时谱如图9所示。
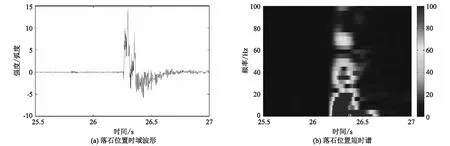
图9 落石冲击信号的时域波形和短时谱图
(2)距光缆1.5 m处(未隔排水沟)
对第二次落石事件进行局部放大,落石冲击信号的时域波形和短时谱如图10所示。

图10 落石冲击信号的时域波形和短时谱图
落石和背景噪声的时域波形和短时傅里叶对比如图11所示。在时域波形图上能够明显分辨出落石事件(后两次较为清晰);从短时谱图上可以看出,背景噪声主要集中在10 Hz以下,落石事件的频率范围约在40 Hz以下。

图11 落石事件和背景噪声时域波形和短时傅里叶对比图
3 试验结果分析
3.1 事件判别
以对上述试验数据在时域和频域上的分析作为依据,得出各工程事件的时域和频域强度范围如表3所示,分别将时域上的强度信息和频域上的主频率信息按照从弱到强划分为0~5共6个等级,如表4所示。

表3 各工程事件的强度、主频率范围表

表4 强度、主频率等级划分表
根据表3工程事件的强度、主频率范围和表4的等级划分情况,可得到5个工程事件在时、频域上的特征信息,如表5所示。

表5 各事件在时频域上的特征信息表
从表5可以看出,各事件组在特征上存在差别。因此,可采用将各工程事件的时域、频域信号强度排序定级的方法,对工程事件的特征进行定量化,从而快速识别出隧道周围发生的工程事件,并据此做出响应。
3.2 事件定位精度
本次试验振动感测光缆沿隧道纵向布设,当事件发生时,信号局部强度变大,通过寻找局部强度最大位置即可确定事件发生位置,如图12所示。
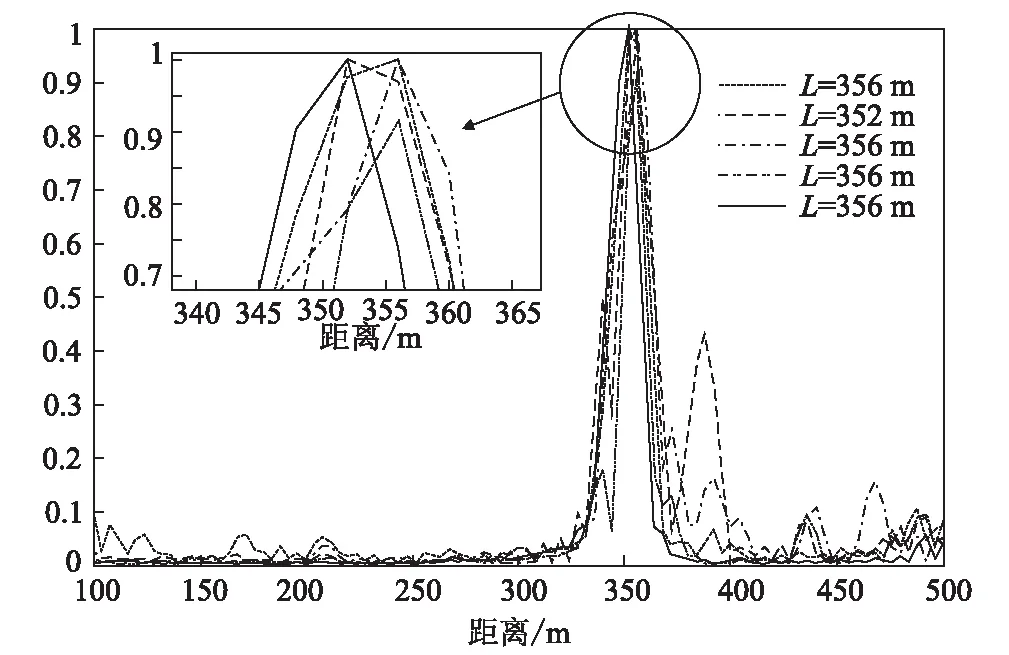
图12 事件沿光纤皮长定位图
从图12可以看出,振动感测光缆感测到5次重复试验事件信号的最大强度位置均位于350~360 m范围内,将信号局部放大后,发现第2次试验光缆识别事件的位置稍有偏差,位于352 m处,其余4次识别事件均发生于356 m处。由此可见,该振动监测系统沿隧道纵向的定位精度可靠,精度可达到±4 m。
当事件沿垂直隧道方向远离光缆时,局部振动强度下降,通过分析局部振动强度的变化情况,可判定事件发生位置与光缆之间的距离,如图13所示。

图13 事件距离光缆垂直距离估计图
从图13可以看出,随着事件发生位置与感测光缆间垂直距离的增大,感测光缆所采集到的信号强度变弱,且二者几乎成线性关系,可据此估算事件发生位置与光缆的实际距离。
将事件实际发生距离与估计距离进行对比,结果如图14所示。从图14可以看出,估计距离与实际发生距离十分接近,但偏大或偏小无法判断,最大偏差-2.8 m的事件位置距离感测光缆最远,符合工程经验。由此可见,该振动监测系统垂直隧道纵向的定位精度可靠,精度可达到±3 m。

图14 垂直定位估计偏差图
综上可知,该振动监测系统可通过事件发生的时、频域信号情况快速判别事件特征,且可较为准确地识别出事件发生的位置范围。当事件发生时,基本可将发生位置锁定在1个4 m×3 m(沿隧道方向×垂直隧道方向)的范围内,这对隧道施工、运营期的监测及突发事件的排查具有重要价值。
4 结论
本文通过采集并分析钻机打孔、挖掘机铲土、工程车辆行驶和隧道内落石的现场试验数据,验证了基于分布式光纤隧道振动监测系统的灵敏度与可靠性。
(1)京雄高速铁路隧道振动监测系统可准确感知隧道周围不同工程事件的强度和频率,并识别出振动事件的特征。
(2)通过时、频域分析方法,可短时间确定振动事件发生的位置,具有较高的定位精度,能满足工程对突发事件准确定位的需求。
猜你喜欢
视野(2022年19期)2022-10-21
哈尔滨工程大学学报(2021年10期)2021-11-05
黑龙江水利科技(2021年9期)2021-09-27
爆炸与冲击(2021年7期)2021-07-30
地震研究(2021年1期)2021-04-13
新生代(2019年16期)2019-10-18
军事运筹与系统工程(2019年4期)2019-09-11
宇航计测技术(2019年1期)2019-03-25
地震研究(2017年3期)2017-11-06
雷达学报(2017年6期)2017-03-26
