
基于无人机低空遥感的输变电线路定时巡检系统
2022-03-15 13:45徐梁,卜京
电子设计工程 2022年5期
徐 梁,卜 京
(1.南京理工大学,江苏南京 210094;2.国网电力科学研究院有限公司,江苏南京 211106)
目前,输变电线路定时巡检系统广泛应用于我国高危电路巡检领域,其可代替工作人员定期完成输变电线路安全巡检工作,为巡检人员减轻了工作量,并保证工作人员的安全。但是输变电线路定时巡检系统在工作时,也逐渐暴露出一些功能问题,比如巡检路线不完全、巡检工作疏忽等,导致其难以达到大众对系统工作的预期效果[1-2]。
设计输变电线路定时巡检系统的目的是在保证巡检结果的基础上减轻传统输变电巡检的劳动强度,但是传统的输变电线路定时巡检系统在工作过程中自动化程度低、事故风险高,并且部分巡检的结果不具有意义[3]。为了解决以上问题,该文提出基于无人机低空遥感的输变电线路定时巡检系统,完善系统的功能,促进输变电线路定时巡检系统的发展。该文从输变电线路定时巡检系统的硬件区域和软件区域两方面出发,突破传统系统的功能设计,使无人机低空遥感的输变电线路定时巡检系统具有成本低、工作效率高、灵敏度强的特点,满足巡检工作的要求。
1 系统硬件设计
基于无人机低空遥感的输变电线路定时巡检系统硬件结构如图1 所示。

图1 系统硬件结构
1.1 摄像器
为了实现基于无人机低空遥感的输变电线路定时巡检系统的数据采集有效性,在TYU-98 摄像器内置红外光摄像头,机器的长焦高分辨率可以达到1 024×720,另外具有30 倍的光学变焦,立体5.1 声道,配有2.7 英寸的摄像屏幕。其示意图如图2 所示。该摄像器采用五轴光学防抖技术,配置920 万像素,可以在外界干扰下保证巡检拍摄的高清图,TYU-98 摄像器的最大优势是可以实现定时拍照以及识别拍照,有利于系统巡检线路的工作需求[4-5]。

图2 TYU-98摄像器
1.2 定位器
基于无人机低空遥感的输变电线路定时巡检系统硬件区域的CMOS 定位器采用双卡板卫星GPS 定位模式。当巡检线路内信号差时,采用双卡板卫星GPS 模式,可以增强信号连通的可能性,降低定位器单GPS 产生的定位误差故障,满足吸引巡检过程中对定位器功能的要求[6]。另一方面CMOS 定位器根据我国地图更新速度进行规律更新,保证无人机巡检线路各个位置的定位误差不超过1 m,采用DSD音频处理,内置4+1 定位流程,保证输变电线路内点位的定位精度。CMOS 定位器定位过的位置不会经过其他途径面向他人,发送定位信息后,会立即对定位缓冲信息进行销毁,保证系统巡检的安全性[7-8]。定位器电路如图3 所示。
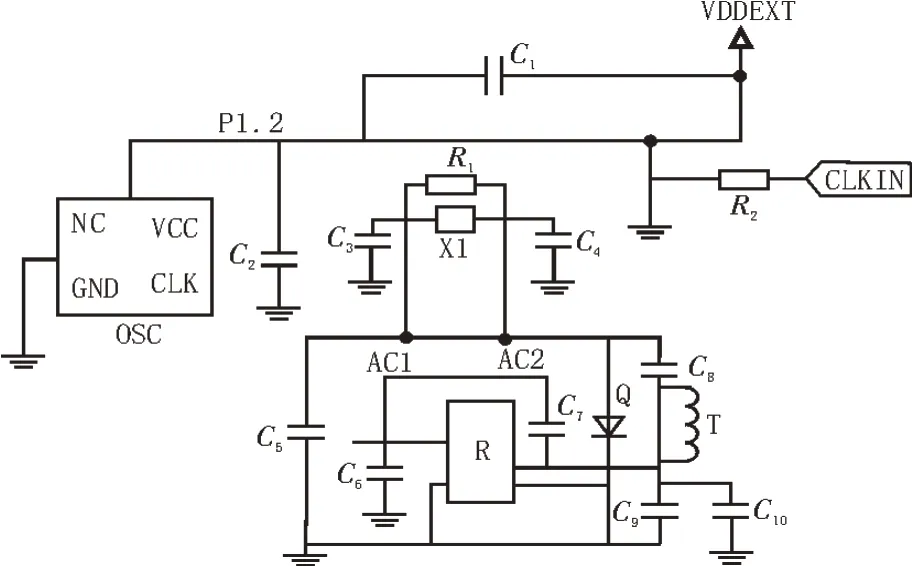
图3 定位器电路
1.3 传感器
硬件区域的传感器的工作任务主要是对硬件区域其他器件采集的信息进行互相传输,并且协作遥感器向软件区域发送系统巡检指令。精度测量单元也被称为IMU,对于输变电线路的测量精度可以精确到厘米,为无人机巡检路线的规划提供了基础[9-10]。传感器结构如图4 所示。计算机单元向遥感器提供输变电线路精确的位置基准,同时为惯性稳定平台提供精确的指向。

图4 传感器结构
1.4 遥感器
为了满足输变电线路定时巡检系统的功能要求,该文采用GYS-8390 遥感器,该遥感器的载荷能力为80 kg,在一个电池续航周期内,可以持续工作72 h,该遥感器的遥感测量速度最快可以达到180 km/h,悬停升限为2 500 m。因为输变电线路所属的环境条件不稳定,因此,GYS-8390 遥感器的抗风能力为5 级,并且可以抵抗基本的电磁压力,遥感器的适应度较好,可以很快进入工作状态[11-12]。
2 系统软件设计
无人机遥感技术是一项集成了无人驾驶飞行器技术、遥感传感器技术、通信技术以及GPS 定位技术的综合性航空遥感技术,主要应用于空间信息的采集以及数据处理等领域,无人机遥感技术是在无线基础上进行工作的,不但可以完成有人飞行机飞行任务,还可以完成无人驾驶的无人机飞行任务[13-14]。对于无人机低空遥感技术该文应用到了两个核心算法,分别是机器学习算法和回归算法。
机器学习算法主要用于遥感技术估算输变电线路各个点位是否需要巡检的可能性,计算结果如果出现巡检的可能性,则输变电线路的该点位就需要进行巡检。机器学习算法的理论定义是假设输变电线路上的点位为(x,y),x表示m维样本特征向量,y有两种表达形式,分别为0 和1,表示是否属于某塔型,那么这个样本塔x属于某塔型(即y=1)的概率可以通过下面的逻辑函数来表示:

其中,x表示包含塔的高度、尺寸等属性的特征向量;θ表示对应x的模型回归系数;σ表示sigmoid 函数。
回归算法是无人机在巡检过程中,一旦由于特殊原因导致飞行信号、频现等信息中断时,无人机低空遥感技术通过回归算法根据中断时的数据,计算出无人机中断后的动向,快速与巡检的无人机信号关联上,保证无人机的安全,使无人机继续完成任务。回归算法的核心是根据无人机中断前和当前的飞行轨迹以及飞行速度等其他参数作为自变量x,无人机中断后可能存在的位置作为因变量y,构建一个线性回归方程,表达之间的关系,计算出无人机信号中断后的位置。
经过以上对基于无人机低空遥感的输变电线路定时巡检系统硬件器件功能的设计和无人机低空遥感技术的分析,该文总结了线路定时巡检系统的工作流程,具体内容如图5 所示。
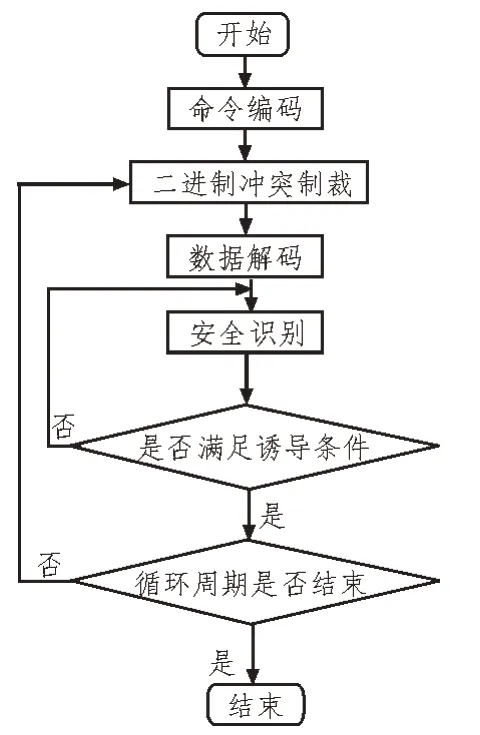
图5 系统工作流程
1)系统在执行巡检任务前需要进行检查工作,首先通过无人机的遥控器将系统打开,然后将无人机与工作的计算机进行无线连接,在该计算机内部同时安装该文设计的输变电线路定时巡检系统,当计算机内“设备未连接”变为飞机的名称时,表明3台设备内接成功,完成检查工作;
2)然后系统将根据任务指令对需要巡检的输变电线路内的数据进行采集,该文设计的系统采用云采集模式,采集过程中计算机可以随意查看数据。线路的初始数据采集完成后,系统根据线路的实际长度和环境情况选择系统巡检的塔台,并导入线路的杆塔坐标文件;
3)导入无人机低空遥感的巡检塔台后,通过遥感技术对将要巡检的输变电线路进行策划,合理地找出各个需要巡检的点位,根据点位的位置系统自动规划设置无人机的巡检最佳飞行路线,其中设置的主要参数为无人机的巡检高度、巡检速度、侧面距离以及起降高度;
4)以上基于无人机低空遥感的输变电线路定时巡检系统在巡检前的准备工作一切就绪后,根据系统策划的线路定期巡检,工作人员点击巡检按钮,无人机就开始自动对需要巡检的线路按照规划的路线进行巡检排查,在此过程中系统巡检的数据结果都会存储并且传回计算机,方便工作人员后期工作[15-16];
5)无人机对输变电线路巡检完成后,会自动根据线路周围的环境以最快的速度返回出发地,在巡检过程中,系统会实时监测无人机周围的环境,一旦出现不在计划范围内的障碍时,系统通过遥感技术、定位器和传感器互相配合,重新发出飞行指令,避开障碍物,保证无人机巡检任务的安全。
3 实验分析
为了检验基于无人机低空遥感的输变电线路定时巡检系统是否具有研究意义以及是否达到预期的效果,该文设计了对比实验完成验证,并将基于无人机低空射频技术的输变电线路定时巡检系统作为对比实验的对照系统,辅助完成实验。
为了保证实验的科学性和真实性,该文选择辽宁省电网某供电局所管辖的110 kV 线路作为实验的巡检任务,此线路长达8 km,并且线路险峻,可以达到巡检任务的要求难度,使巡检实验具有意义。为了保证实验的安全性,两种系统在工作时同时连接计算机,一方面可以实时记录实验数据,另一方面在实验过程中一旦出现意外情况,工作人员可以随时终止实验,保证安全。在实验进行前,对两个系统进行初始化,防止系统错误,影响实验结果,实验主要过程是在同一时间向两个系统发布巡检任务,然后工作人员记录两个系统的实验数据,每个系统都巡检完成后,关闭系统、整理数据、得出结论。巡检时间实验结果如图6 所示。
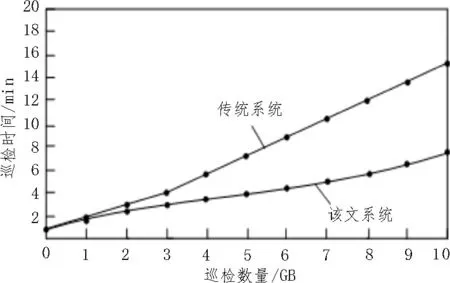
图6 巡检时间实验结果
通过工作人员对实验数据的整理,得出该文设计的基于无人机低空遥感的输变电线路定时巡检系统比传统的输变电线路定时巡检的数据精度高,并且完成时间快。
定时精准度实验结果如图7 所示。
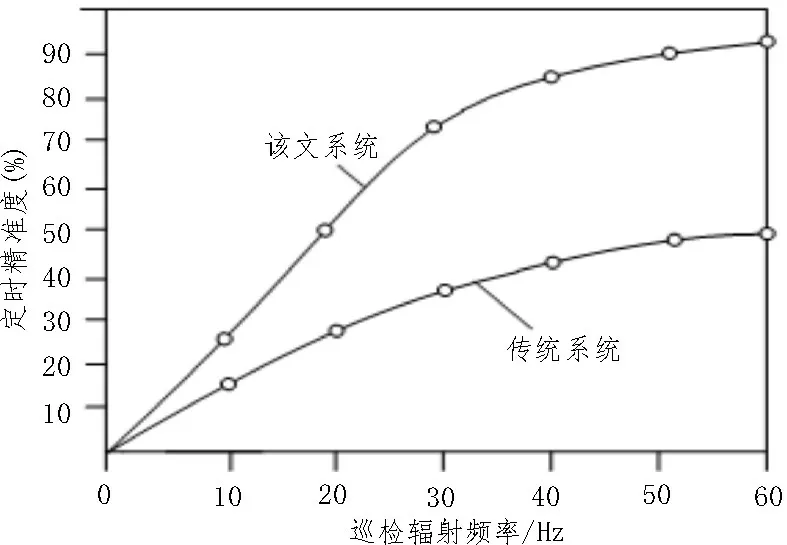
图7 定时精准度实验结果
相比传统的输变电线路定时巡检系统,该文设计的巡检系统采用遥感器和TYU-98 摄像器,可以在线路的任意相对空间位置进行悬停拍摄,既缩短拍摄的时间,又提高了拍摄的精准度。但是传统的巡检系统采用最普通的摄像器,只能在无人机停止的时候进行拍摄,这就降低了系统巡检的效率。该文设计的系统采用低空遥感技术,不受线路地形、气候的影响,提高了系统巡检数据结果的采集效率。该文设计的系统功能性强于基于无人机低空射频的输变电线路定时巡检系统,采用定位器和传感器,两个器件互相作用,可以准确地侦查出需要巡检的输变电线路内不同位置的巡查等级,然后器件向软件区域发出指令,各个区域紧密联系,完成输变电线路定位巡检工作。
经上述实验验证可知,该文研究的基于无人机低空遥感的输变电线路定时巡检系统可以完成精细化的巡检工作,并且系统工作效率高,具有较强的电网巡检规范性。
4 结束语
该研究设计了基于无人机低空遥感的输变电线路定时巡检系统,将输变电线路巡检需要完成的任务与无人机低空遥感技术的功能进行对接,最终设计一个具有高精度、低成本、功能强大的输变电线路定时巡检系统,最大程度地满足输变电巡检领域的需求。
猜你喜欢
民族文汇(2022年9期)2022-04-13
科技创新导报(2021年33期)2021-04-17
军民两用技术与产品(2021年10期)2021-03-16
青年文学家(2020年10期)2020-04-27
环境与发展(2019年4期)2019-08-06
科学与财富(2019年4期)2019-04-04
小学生作文选刊·低年级版(2017年4期)2017-06-07
南方文学(2016年3期)2016-06-12
兵器知识(2016年2期)2016-01-29
建筑工程技术与设计(2015年12期)2015-10-21
