
基于机器学习与自适应PID调节的工业机器人路径跟踪方法
2022-03-12 11:33欧群雍张吉同李喜华
制造业自动化 2022年2期
欧群雍,张吉同,李喜华
(郑州工业应用技术学院 信息工程学院,郑州 451150)
0 引言
在机械制造业领域技术装备改造和升级的当下,工业机器人因具有较高的智能性和可控性而得到了广泛的应用。在制造生产线上,全自动工业机器人能够替代人工完成重复性工作,不仅有效提高了制造效率,还能节省资源、降低成本[1]。
路径跟踪技术是工业机器人的核心技术之一。路径跟踪配合路径控制能够保证机器人按既定路线移动。为此,文献[2]中提出了一种基于模糊算法的机器人路径跟踪方法,该方法根据机器人所处的环境动态规划其移动路径,然后通过构建函数关系计算路径中各点的曲率,再利用信号产生器、反馈控制器实时跟踪机器人的移动路径。文献[3]中提出了一种基于激光雷达的移动机器人路径自动跟踪方法,该方法通过舵机模块和速度检测模块来监测机器人的移动速度,从而分析其在移动时受到的影响,然后通过采集相关的激光数据,可视化监测机器人的真实移动路径。
基于上述研究,本文将机器学习技术应用到机器人移动路径自动跟踪工作中,配合自适应PID调节技术控制移动路径跟踪时偏差,从而获得更准确的移动路径跟踪结果。
1 工业机器人路径跟踪方法设计
本研究首先利用机器学习技术中的卷积神经网络得到工业机器人路径的初步跟踪结果,然后利用自适应PID调节技术智能调整跟踪误差,从而获得精确的路径跟踪结果。
1.1 基于机器学习技术跟踪工业机器人路径
1.1.1 采集工业机器人移动场景图像
采用分辨率为2048×1536的自动曝光模式,利用 CCD相机对工业机器人移动场景图像进行采集,并将采集到的场景图像保存至统一的环境中。具体的采集步骤如图1所示。
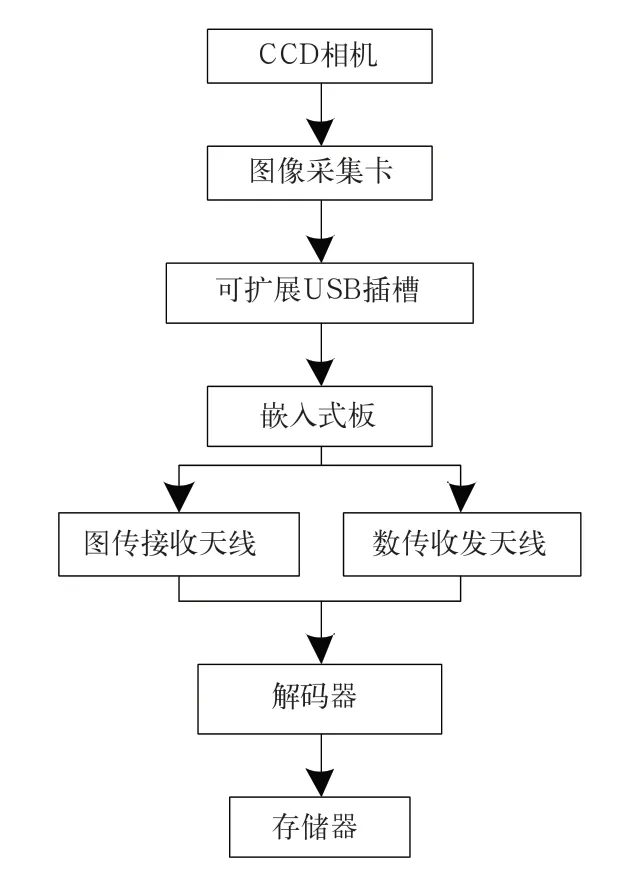
图1 工业机器人移动场景图像采集方案
如图1所示,将图像采集卡与CCD相机和嵌入式板相连接,利用图像传输天线和图像接收天线组成图像传输模块,通过图传与数传两个渠道同时完成对工业机器人移动场景图像的准确采集。
在使用CCD相机拍摄图像时,尽可能使相机镜头与机器人所移动平面平行,防止采集到的路径信息出现明显的变形[4]。采集到的场景图像如图2所示。

图2 工业机器人移动场景图像示例
1.1.2 工业机器人移动场景图像预处理
图像归一化处理是卷积神经网络模型训练前的重要预处理步骤。采用归一化操作对采集到的图像数据实施统一的量化处理后,可以有效降低某些图像特征被忽略的情况。且输入归一化图像数据集后,卷积神经网络训练过程的收敛速度将大大提高。
对工业机器人移动场景图像实施归一化处理的作用是呈现样本的统计分布,将数据区间归一化为[0,1],则区间呈现坐标分布。为此,本研究采用Z-score方法将工业机器人移动场景图像数据归一化至[0,1]区间内,以满足卷积网络模型对输入数据的要求,过程如下:

式(1)中,X表示工业机器人移动场景图像数据,v表示图像中有效数据的均值,参数σ2表示图像数据的方差。
1.1.3 利用卷积神经网络初步跟踪工业机器人路径
本研究利用机器学习技术中的卷积神经网络提取业机器人路径特征,从而得到工业机器人路径的初步跟踪结果。
从结构上看,卷积神经网络由输入层、特征提取层和输出层组成。其中,特征提取层包括一个或多个卷积层、池化层和全连通层,输出层包括全连通层和分类器。
淫羊藿总黄酮提取物的HPLC指纹图谱建立及其中8种成分的含量测定 ………………………………… 牛晓静等(24):3376
在机器人路径特征提取过程中,卷积层会接收前一层的特征映射,并利用当前层的卷积对其进行仿射。计算运算结果,通过激活函数得到该层的特征映射:


式(3)中,down(·)表示下采样函数,ωn`i表示第n下采样层第i个卷积核的权重。基于此,重新代入提取到的工业机器人路径特征Z(X),通过网络训练和迭代,即可得到初步的工业机器人路径跟踪信息。
识别工业机器人路径信息需要设置一个对比标准,明确路径信息与背景信息之间的区别,并按照之前提取的路径特征设置具体的对比标准图谱。然后计算图谱中的标准路径特征与卷积神经网络中提取的路径特征之间的相似度,实现路径特征的匹配,过程如下:

式(4)中,cx和cy分别表示卷积神经网络中提取的路径特征和图谱中的标准路径特征。在此基础上,对与图谱中的标准路径特征高度相似的路径信息Cx做融合处理,得到初步的工业机器人路径跟踪信息Cx。
1.2 跟踪结果的自适应PID调节
在上述的研究过程中,在采集机器人移动场景图像信息后,将其输入到卷积神经网络中,借助于机器学习技术获得了初步的工业机器人移动路径跟踪结果。

图3 自适应PID调节过程示意图
由于被调节对象为工业机器人,误差收敛趋势会影响输出移动路径偏差值,因此,需指明参考路径,并依照评估结果调整新的收益参数,传输给PID执行端,从而获得较快的收敛效果。自适应PID的增益为:

式(5)中:K(t)表示自适应PID增益,K0表示常数,ΔK表示自适应PID增益变化值。
卷积神经网络的收敛速度相对较好,但依旧存在路线误差,为此,设计如下自适应PID路径调节规律:

式(6)中:PID增益常数部分为kP0、kI0、kD0。
由于工业机器人移动路径信息输出结果不是单一变量,所以跟踪过程会根据外界环境而自适应随机变化。因此,本文利用Actor-Critic网络选择高斯分布明确随机路径跟踪概率,则存在:

依据式(6)所示的路径调节规律,由Actor-Critic网络构建卷积神经网络调节器模块,可根据参考路径预测和实际误差的输入,判断输出的增益值函数值,自学习调整增益输出。增益部分的信息可变部分使用随机测试,从而得到最终工业机器人路径跟踪结果如下:

2 实验与分析
为了验证上述设计的基于机器学习与自适应PID调节的工业机器人路径跟踪方法的实际应用效果,设计如下仿真实验过程。
2.1 实验设计
实验设定采用MATLAB仿真平台跟踪工业机器人的移动路径。设置直线移动和曲线移动两种移动方式:
1)直线移动时工业机器人范围为10m×10m,其移动初始点(0,0)、结束点(10,10),输入角速度为0.5rad/s,线速度为0.15m/s。
2)曲线移动时:工业机器人在圆x2+y2=r2(r=3m)范围内移动,工业机器人初始和终止位置都为(-2,2),输入角速度为0.1rad/s,线速度为0.3m/s。
2.2 路径跟踪效果分析
利用本文方法跟踪工业机器人在直线移动和曲线移动情况下的路径,并与其真实路径进行对比,得到测试结果如图4、图5所示。其中,实线为跟踪得到的机器人移动路径,虚线为机器人的实际移动路径。
通过观察图4、图5可以看出,两条跟踪路径基本吻合,说明本文方法跟踪得到机器人移动路径与真实路径之间的差距较小,实现了有效降低跟踪偏差的目的。这是因为本文方法在利用机器学习技术中的卷积神经网络得到工业机器人路径的初步跟踪结果后,又通过自适应PID调节技术智能调整跟踪误差,在实际跟踪结果与真实值之间存在偏差时,按定额或标准来进行纠正,从而获得了更为精确的路径跟踪结果。
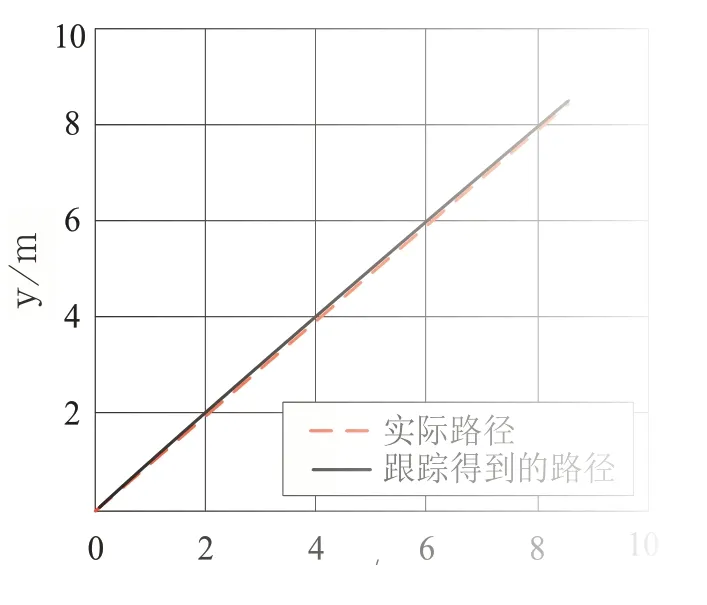
图4 直线移动路径跟踪效果图
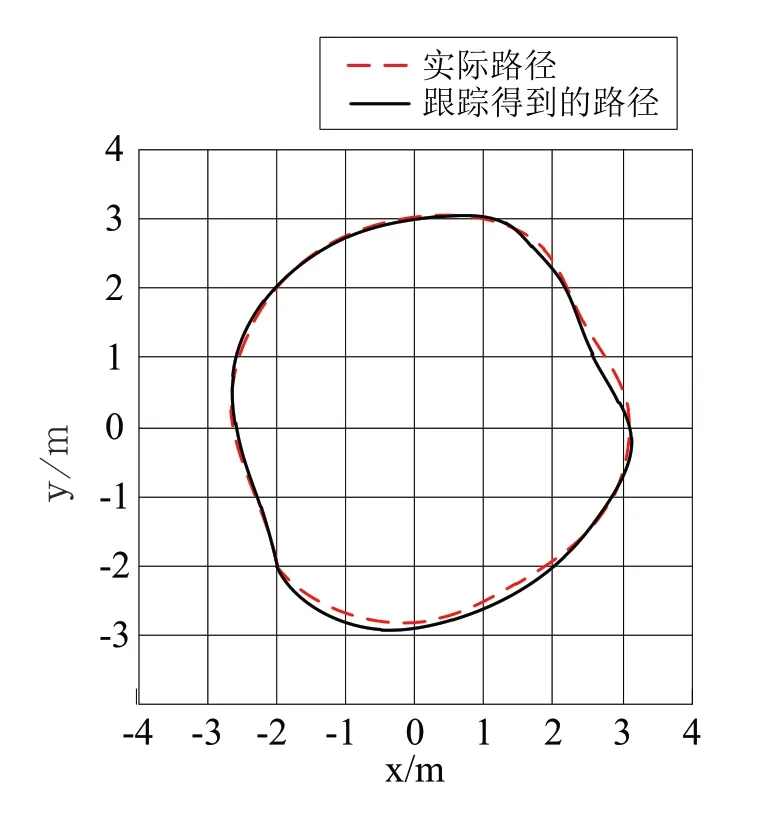
图5 曲线移动路径跟踪效果图
在此基础上,为了进一步验证本文方法的应用效果,以跟踪数据传输耗时为指标,对本文方法、文献[2]方法、文献[3]方法的时效性展开检验,得到结果如图6所示。
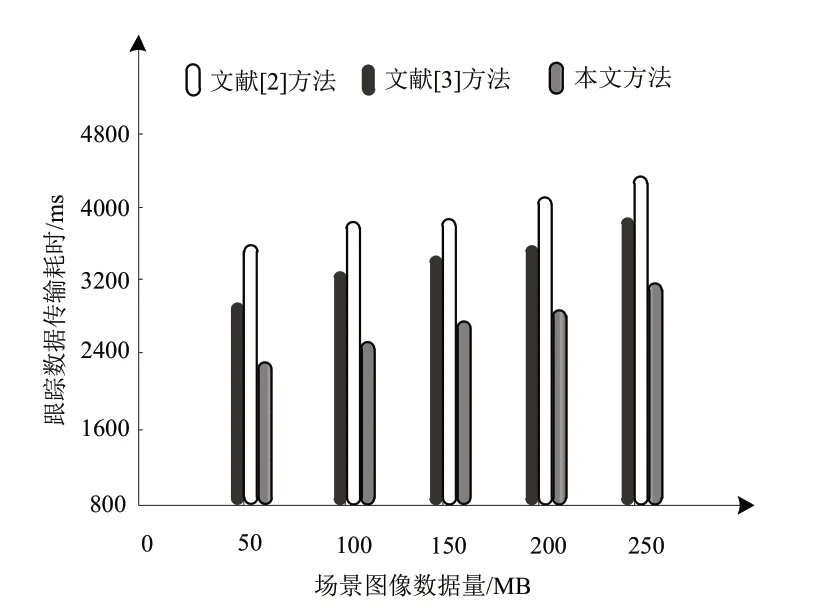
图6 不同方法跟踪数据传输耗时测试结果
通过观察图6所示结果可以看出,随着工业机器人移动场景图像数据量的增加,不同方法跟踪数据传输耗时也随之增加。但相比之下,本文方法的跟踪数据传输耗时始终少于两种传统方法。这是因为本文方法在采集工业机器人移动场景图像后对其实施了归一化处理,以满足卷积网络模型对输入数据的要求,然后针对输入到模型中的路径信息,将其与图谱中的标准路径特征高度相似的路径信息做融合处理,快速得到工业机器人路径跟踪信息。
3 结语
现代社会制造业离不开工业机器人的技术发展,针对工业生产中应用广泛,重复性的任务操作,机器人的路径跟踪问题成为重要关注点。为此,本文分析了工业机器人移动路径自动跟踪及轨迹误差问题,利用机器学习中的卷积网络模型和自适应PID调节技术,得到了精准的工业机器人路径跟踪信息,有效降低了学习时间和跟踪偏差,使机器人的工作效率明显提高。
仿真实验中,无论是直线还是曲线移动路径任务,本文方法控制下机器人均能实现精准的跟踪,且数据传输过程的时效性较高,证明本文方法具有较高的应用优势。
猜你喜欢
现代电力(2022年2期)2022-05-23
北京航空航天大学学报(2021年9期)2021-11-02
电子制作(2019年13期)2020-01-14
电子制作(2019年19期)2019-11-23
电子制作(2019年11期)2019-07-04
电子制作(2019年24期)2019-02-23
北京航空航天大学学报(2018年1期)2018-04-20
北京航空航天大学学报(2017年12期)2017-04-23
Coco薇(2015年10期)2015-10-19
全国新书目(2009年24期)2009-07-17
