
基于深度卷积神经网络的船舶轨迹分类研究
2022-03-12 09:51常吉亮魏志威赵建伟
武汉理工大学学报(交通科学与工程版) 2022年1期
常吉亮 谢 磊 魏志威 杨 洋 赵建伟
(武汉理工大学国家水运安全工程技术研究中心1) 武汉 430063)(武汉理工大学船海与能源动力工程学院2) 武汉 430063) (中国船舶工业综合技术经济研究院3) 北京 100081)
0 引 言
船舶自动识别系统(automatic identification system,AIS)是一种开放式数据传输系统,广泛应用在船舶交通信息采集与分析[1-2]、船舶航行监测[3]以及水上交通规划[4]等领域.通过AIS收集到的船舶轨迹数据具有海量性、地理范围大等优点,但数据时间间隔过大、质量不高,给船舶轨迹分类带来挑战.
目前船舶轨迹分类的具体应用场景包括船舶类型识别和船舶运动模式识别,其实现过程包括船舶轨迹特征提取和轨迹分类模型构建.Chen等[5]基于稀疏表示分类算法实现了对AIS船舶轨迹的分类,该方法以稀疏表示捕捉船舶轨迹的特征,但忽视了船舶轨迹的空间特征.Kraus等[6]通过对船舶轨迹的地理特征(航行路线、停留区等)和行为特征(航向、航速等)的提取,利用随机森林算法实现了对船舶类型的分类,但是特征提取过程过于繁琐.Sánchez等[7]基于AIS船舶轨迹,使用SVM和决策树实现是否为渔船的二分类问题,但SVM和决策树模型还有提升的空间.Sheng等[8]将船舶轨迹分为锚泊、直行、转向三种运动模式,根据航速、航向等因素,提取三种模式行为特征,以逻辑回归为模型建立船舶轨迹特征分类模型,同样欠缺对船舶轨迹空间特征的考虑.崔彤彤等[9]将LSTM与CNN结合,建立了一种混合分类模型,使用航速、加速度、航首向和曲率为特征,以特征向量为模型输入,输出为船舶种类.该方法利用了CNN提取轨迹数据的空间特征,利用LSTM提取轨迹数据的时序性特征.因为船舶轨迹数据属于空间性数据,文中在研究工作中又参考了部分针对轨迹图像分类的方法,Chen等[10]将船舶轨迹数据转化为船舶轨迹图像数据,根据航向变化对每条船舶轨迹的运动模式进行划分,以红绿蓝三种颜色表示船舶轨迹的三种运动模式,建立CNN-SMMC卷积神经网络,实现对船舶轨迹不同运动模式的分类.
上述研究在采用有监督算法进行船舶轨迹分类时,对船舶轨迹空间特征信息利用较少,并且在船舶轨迹航向、航速等特征提取过程过于繁琐.为克服上述不足,文中以船舶轨迹图像为数据基础,提出一种基于深度卷积神经网络的船舶轨迹分类方法.在方法实现过程中,考虑到单纯的经纬度数据难以准确的描述轨迹的空间特征,故结合船舶轨迹的位置信息,将船舶轨迹数据转换为船舶轨迹图像数据.发挥深度卷积神经网络在空间数据特征提取的优势[11-12],建立了船舶轨迹分类模型,开展网络训练.选取全连接神经网络模型和多类别SVM模型作为对照,与文中方法进行对比分析.
1 船舶轨迹数据预处理
1.1 水域航道分析
文中选取了2019年1月—3月的美国沿海AIS船舶交通数据开展算法研究和验证(https://marinecadastre.gov/ais/),该数据集包括2 229条不同的船舶,263 149个轨迹点.选取的分析水域位于北纬48°54′7.28″~49°3′44.28″,西经123°1′43.33″~123°25′2.71″,在美国察华逊卑诗渡轮码头附近,图1为分析水域的电子地图和电子海图.

图1 分析水域的电子地图和电子海图
针对该水域的电子海图进行分析,发现其包含四条传统航道,以2019年1月的真实船舶轨迹为基础绘制交通流密度图,可以发现:真实船舶轨迹的可视化结果与电子海图中的传统航道结果基本一致,只是多出了一条由码头对岸向北延伸的航线.因此,本文将该水域的船舶轨迹分为五类,分别对应四条传统航道和一条非传统航道,并在数据集的人工标注中以此为依据.图2为分析水域所包含的航道及其交通流密度图.
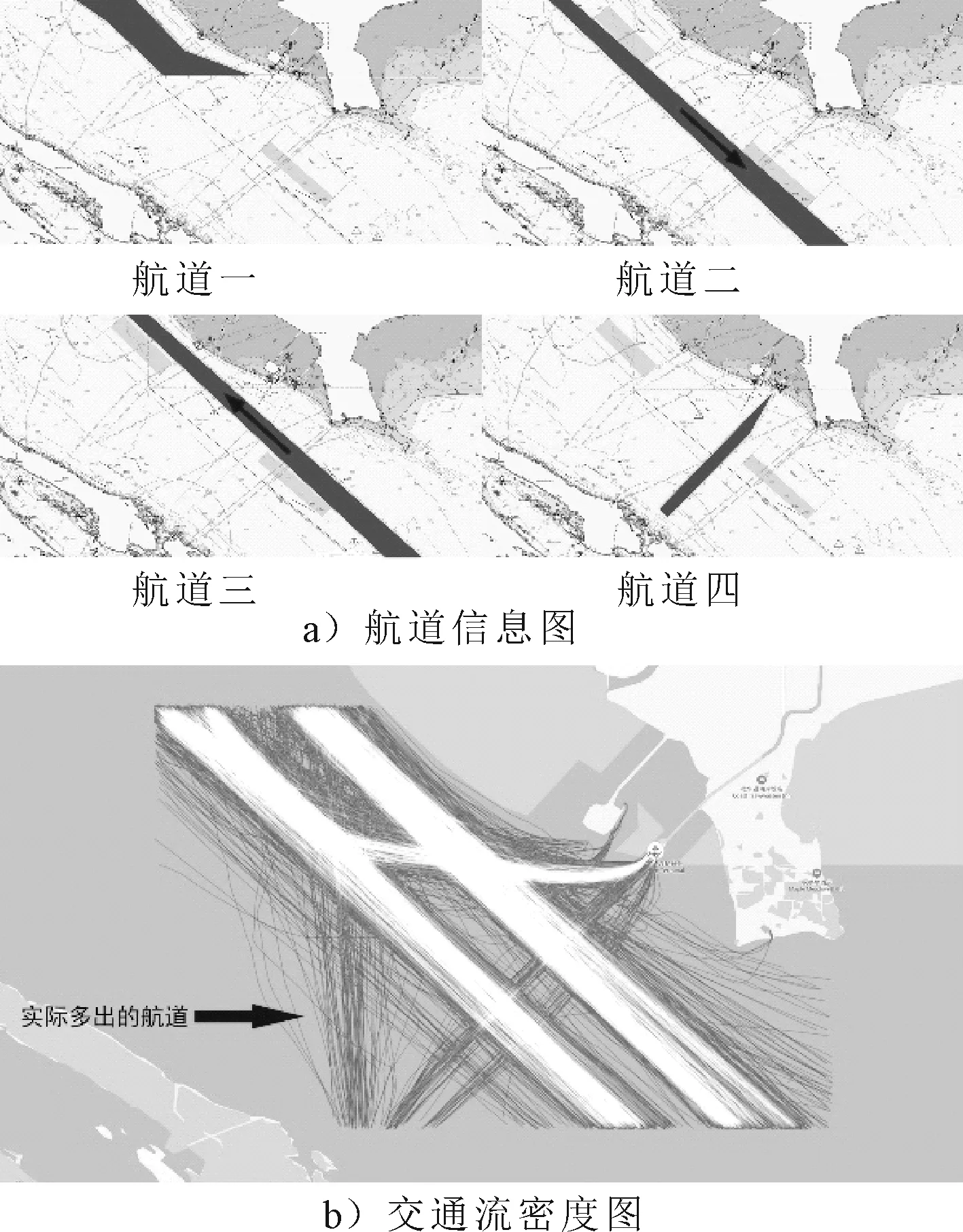
图2 分析水域包含的航道及其交通流密度图
1.2 船舶轨迹预处理
船舶轨迹预处理的主要工作是无效轨迹剔除.无效轨迹剔除通常是基于时间间隔和船舶速度变化的,表1为其处理步骤的伪代码,表2为船舶轨迹预处理的阈值参数设置,表3为船舶轨迹预处理之后的统计结果.

表1 无效轨迹剔除处理步骤的伪代码
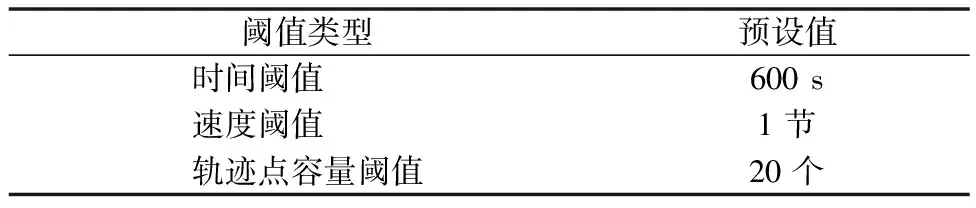
表2 船舶轨迹预处理的阈值参数设置

表3 船舶轨迹预处理之后的统计结果
2 船舶轨迹数据集构建
2.1 水域映射和坐标转换
将分析水域视为一个矩形区域,计算其长宽比并确定图像分辨率.文中使用Haversine公式计算两经纬度坐标点之间的距离,见式(1).R为地球半径,可取平均值为6 371 km;φ1、φ2为两点的纬度;Δλ为两点经度的差值.经过计算,选取的分析水域长度为28.41 km,宽度为17.82 km,长宽比近似比例为14∶9.
cos(φ1)cos(φ2)haversin(Δλ)haversin(θ)=
(1)
将分析水域映射成一个具有同样长宽比的矩形图像,其分辨率设置为112×72.映射后,纬度取值范围[49.06,48.90]被转换至像素取值范围[0,71],经度取值范围[-123.42,-123.03]被转换至像素取值范围[0,111],即:映射后的矩形图像,其左上点像素坐标(0,0)对应了经纬度坐标(-123.42,49.06),右下点像素坐标(111,71)对应了经纬度坐标(-123.03,48.90).
2.2 船舶轨迹数据集
按照2.1所给出的映射关系,对预处理后的船舶轨迹经纬度数据进行转换,以得到船舶轨迹的图像数据.在1.1的航道分析结果中,已确定船舶轨迹的种类一共有五种,因此船舶轨迹的标签取值范围为:0、1、2、3、4,分别对应上述五种船舶轨迹种类.图3为一些代表性的船舶轨迹数据集,其中,左边为船舶轨迹所属航道类簇,右边为对应的船舶轨迹数据.具体的数据集详细信息以及训练集和测试集的划分见表4.

表4 船舶轨迹数据集详细信息
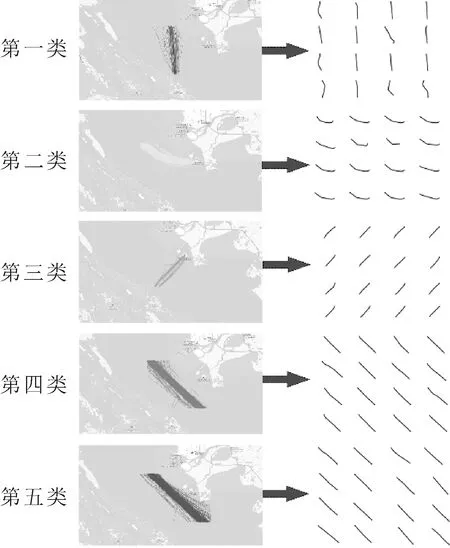
图3 代表性的船舶轨迹数据集
3 深度卷积神经网络构建
基于残差网络构建了船舶轨迹分类网络模型[13].船舶轨迹分类网络模型所采用的残差网络子结构件见图4.其具有三个特点:①它直接将输入加到经过卷积操作得到的输出上,这样可以避免梯度消失的问题,并且可以捕捉到很小的扰动;②它的首末两端使用1×1的卷积,分别减少和恢复数据维度,这两种结构的时间复杂度相似,但却加深了网络层数和结构数量,解决了网络退化和训练过程性能提升慢的问题;③它全部采用3×3和1×1的小尺寸卷积核,并且使用到了Batch Normalization技术.

图4 残差网络子结构图
船舶轨迹分类网络结构见表5.该结构由五个卷积块依次堆叠而成,每一个卷积块中都包含图4的残差结构网络子结构,不同卷积块中的残差结构网络子结构具有不同的卷积核数目.

表5 船舶轨迹分类网络结构表
4 网络训练与结果分析
4.1 训练设置
船舶轨迹分类网络模型的输入层维度参数设置为112×72×3,Mini Batch Size设置为64,输出层类别设置为5,具体的参数设置见表6.
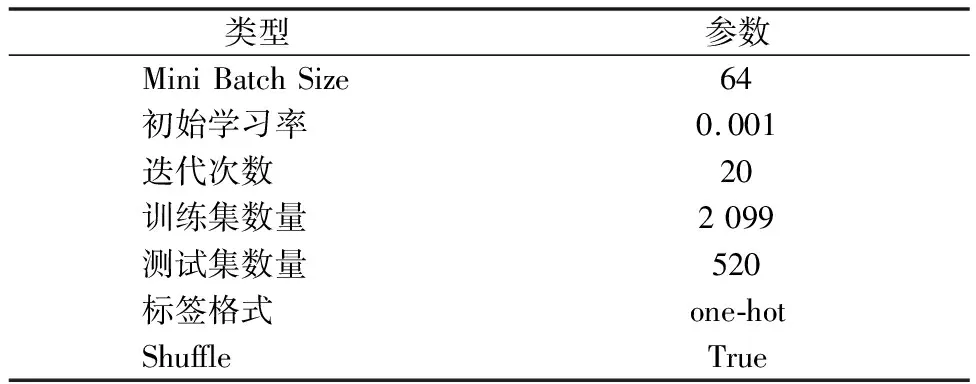
表6 船舶轨迹分类网络参数
对于多分类问题,使用交叉熵为损失函数(Categorical_crossentropy),并配合Softmax激活函数进行使用.交叉熵的损失函数E的定义为
(2)

4.2 训练效果分析
图5为训练过程中的loss值的变化情况.随着训练次数的增加,模型对训练集中的验证数据的分类准确率迅速上升,在迭代次数达到7次以后,准确率维持在98.90%附近,同样说明模型已经具备有效的分类能力,图6为训练过程中验证数据的分类准确率.
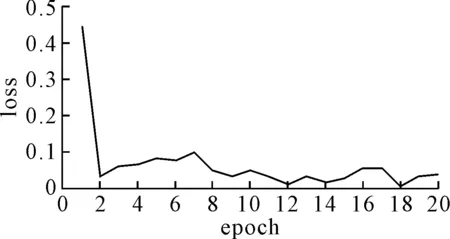
图5 训练期间loss值变化曲线图

图6 针对验证数据的分类准确率变化曲线图
4.3 测试集分析
表7为测试集分类结果的混淆矩阵,其中,第一类、第二类和第三类的分类准确率为100%,第四类和第五类的334个样本中,出现了两个误识别样本.图7为分析水域内第四类和第五类船舶轨迹的对照图,从中可以看出,在第四类和第五类船舶轨迹中,有极少部分船舶没有行驶在所对应的航道内,而是在两个航道之间的分隔带内航行,这事实上违反了《船舶定线制的一般规定》,同时也导致出现了误分类船舶轨迹.尽管如此,文中船舶轨迹分类模型仍然在测试集上取的了99.61%的准确率,实现了对分析水域内船舶轨迹类别的准确分类.
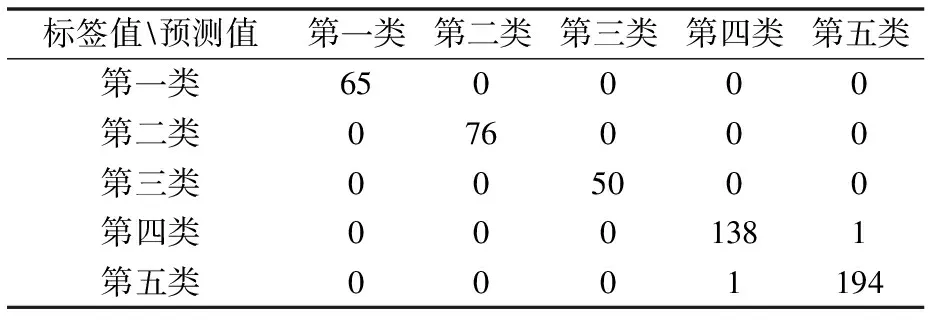
表7 测试集分类结果的混淆矩阵

图7 分析水域内第四类和第五类船舶轨迹对照图
4.4 交叉验证对比测试
选取以经纬度数据格式为输入的全连接神经网络模型和多类别SVM模型作为对照,开展对比分析.全连接神经网络对比模型的参数信息见表8,其中,全连接神经网络要求数据输入格式统一,所以文中借鉴文献[5]的方法,利用三次样条插值,将每条船舶轨迹数据采样为50个点.
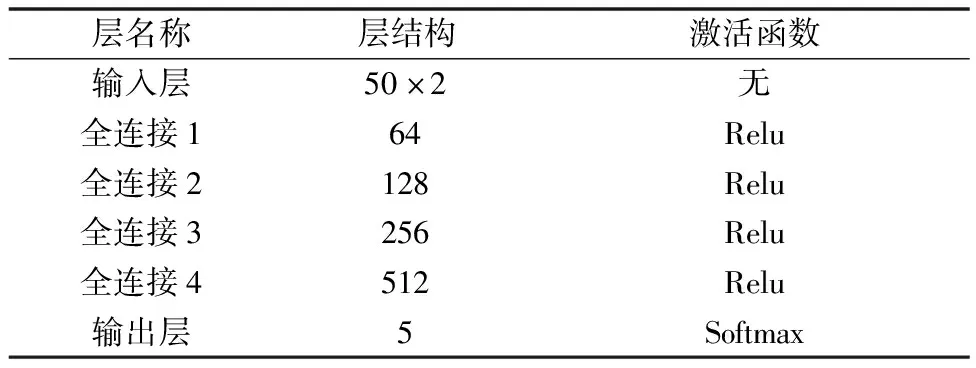
表8 全连接神经网络对比模型的参数信息
参与对比的全连接神经网络的输入数据格式为50×2的数组,其中2为船舶轨迹数据的经度和纬度,50为每条轨迹经过采样后的轨迹数据长度.参与对比的SVM模型的输入数据格式为100×1的数组,100为将上述50×2的数据扁平化的结果,核函数为RBF.所有模型均进行了十折交叉验证.图8为三种模型的十折交叉验证结果,表9为三种模型十折交叉验证得到的平均准确率.由实验对比结果可知,文中提出的船舶轨迹分类网络模型达到了98.72%的准确率,高于全连接神经网络模型93.53%的准确率和SVM模型91.73%的准确率,从而验证了船舶轨迹航道分类模型在船舶轨迹分类性能方面的优越性.

图8 三种模型的十折交叉验证结果

表9 三种模型十折交叉验证的平均准确率 单位:%
5 结 束 语
文中针对船舶轨迹分类研究中存在的问题,提出了一种基于深度卷积神经网络的船舶轨迹分类方法.基于AIS数据的时间间隔和船速变化,对船舶轨迹数据进行划分与剔除处理,以得到连续的、有效的船舶子轨迹;将轨迹经纬度数据转换为高维轨迹图像数据,提取了船舶轨迹的空间特征;基于残差网络原理构建了船舶轨迹分类模型,实现了船舶轨迹分类;将船舶轨迹的经纬度数据作为输入,构建了全连接神经网络模型和SVM模型作为对照模型,与本文提出的模型进行对比实验.实验结果显示:本模型在测试集上的准确率为99.61%,十折交叉验证的准确率为98.72%,高于全连接神经网络的93.53%和SVM的91.73%.
通过上述对比结果可以发现:将船舶轨迹转换成图像数据,在保留了其空间特征表达能力的同时简化了数据的特征提取工作,提高了数据处理的效率;使用深度卷积神经网络完成轨迹分类任务,可以充分的利用了轨迹数据的空间特征;与全连接神经网络模型和SVM模型相比,文中提出的方法拥有更高的船舶轨迹分类准确性.
猜你喜欢
中学生数理化(高中版.高考数学)(2022年4期)2022-05-25
水上消防(2021年3期)2021-08-21
健康之家(2021年19期)2021-05-23
医学食疗与健康(2021年27期)2021-05-13
农业科技与信息(2021年2期)2021-03-27
水上消防(2020年4期)2021-01-04
健康体检与管理(2021年10期)2021-01-03
水上消防(2020年5期)2020-12-14
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
