
基于PEV准则的不确定混合多传感器联盟求解
2022-03-11 02:30:16谢家豪黄树彩韦道知张曌宇王文豪
系统工程与电子技术 2022年3期
谢家豪, 黄树彩, 韦道知, 张曌宇, 王文豪
(空军工程大学防空反导学院, 陕西 西安 710051)
0 引 言
多传感器协同探测的一种重要的方式是组建多传感器联盟,目前大多数联盟的建立都是基于串行结构,该结构存在的主要问题是效率低,而且容易造成资源浪费或过度紧张。串行多传感器联盟求解问题主要分为组建和更新两部分。目前国内外对多传感器联盟组建的算法有很多,如多传感器交叉提示算法、多目标规划方法、粒子群算法等。但是以上算法并未考虑环境的动态变化以及在组建联盟过程中产生的消耗问题。对于多传感器联盟机制,文献[13]提出了“量测即更新”更新机制,文献[14]提出了“预测即更新”机制,但是这两种更新机制未考虑到战场环境的动态变化,交接过程中也存在丢失目标的风险。同时在实际的作战环境中,空间内部署的传感器本身性能指标和传感器所受外界的威胁存在较大的不确定性。但是串行多传感器联盟模型并不能很好地解决上述问题,本文在考虑联盟求解效率低以及联盟求解过程中存在的不确定性的基础上建立不确定混合多传感器联盟模型。
不确定混合多传感器联盟模型求解问题本质上是不确定性多目标规划问题,目前国内外对该问题的传统求解模式是先将原问题转化为确定的多目标规划问题,再通过经典的多目标规划方法将其转化为确定的单目标规划问题。但是,该方法大多数情况适用于目标函数之间是不相关的,也容易忽略不确定问题的不确定本质,因此本文提出了一种基于P准则的不确定混合多传感器联盟的求解方法。首先将不确定多目标规划问题通过不确定理想点法变成不确定单目标规划问题,其次进一步通过一定的序关系准则实现不确定单目标规划问题向确定单目标规划问题的转变,在基本烟花算法(fireworks algorithm, FWA)的基础上通过设计基于改进选择策略的FWA (improved selected strategy FWA, ISSFA)得到原问题的有效解,进行联盟组建,并与已有文献进行对比仿真分析,验证其有效性。同时提出“预测再预测”机制完成联盟的更新任务,实现对目标的稳定跟踪。
1 不确定混合多传感器联盟模型建立
1.1 目标运动模型

在对目标的跟踪过程中采用扩展卡尔曼滤波(extended Kalman filter, EKF)算法对目标的状态进行估计。算法过程如下:

(1)

(2)
(+1)=(+1|)(+1)·
[(+1)(+1|)(+1)+]
(3)
(+1|)=(+1|)(|)(+1,)+-1
(4)

(5)
1.2 模型建立

组建不确定混合多传感器联盟问题中建立的目标函数。
(1) 组建联盟所需的时间最短
组建个传感器联盟在执行个任务所用的时间越少,表示每个任务由离其最近的传感器联盟执行,从而大大提高了传感器资源的分配效率。依托专家信度分析可得传感器的相对能耗值和传感器所受的威胁度对组建联盟所需的时间影响较大,据此可建立如下目标函数:

(6)
(2) 组建联盟产生的消耗最少
混合多传感器联盟完成任务产生的消耗主要有传感器自身的消耗和各传感器之间的消耗两部分。假设每个传感器产生的消耗为(=1,2,…,;=1,2,…,),每个传感器联盟记为=()×,其中=1表示传感器对目标进行跟踪,=0表示传感器不对目标进行跟踪。依托专家信度分析可得传感器的探测距离和传感器所受的威胁度对组建联盟影响较大,据此可建立如下目标函数:

(7)
(3) 组建的联盟对目标的跟踪精度误差最低
假设我方有个传感器{,,…,}对来袭目标进行跟踪,{,,…,}为各传感器对应的跟踪精度误差因子。跟踪精度误差因子定义为
(8)
式中:(=1,2,…,)为基于第个传感器得到的目标状态最小二乘估计的误差阵;tr(·)表示矩阵的迹。
依托专家信度分析可得传感器所受的威胁度和传感器的相对能耗值对组建联盟的影响较大,据此可建立如下目标函数:
(9)
约束条件如下:
(1) 传感器是否加入混合多传感器联盟实现对目标的跟踪过程,即=1代表加入联盟对目标跟踪,否则=0;
(2) 每个传感器联盟所能承担的任务数有上限,即≤;
(3) 每个传感器所能参加跟踪任务的数量有限,不能超过所能允许范围的最大值。
2 不确定混合多传感器联盟模型求解
不确定多目标规划模型一般可以表示为

s.t.(,)≤0,=1,2,…,
(10)
式中:∈为决策变量。
在实际工程应用中,不同目标函数的具体特征值具有不同的意义,所以需要通过一定的序关系准则P来确定不同目标函数的具体特征值的具体意义。由于不确定目标函数其本身也是不确定变量,所以本文首先使用符号p和p=来定义不确定变量之间的关系。序关系准则通常包括期望准则和期望-方差准则,具体定义如下:
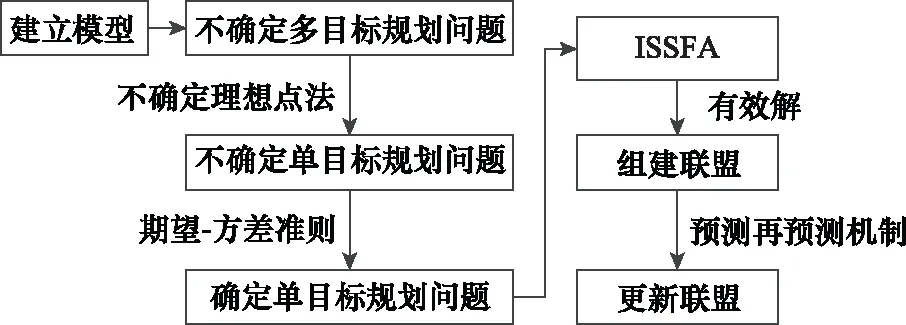
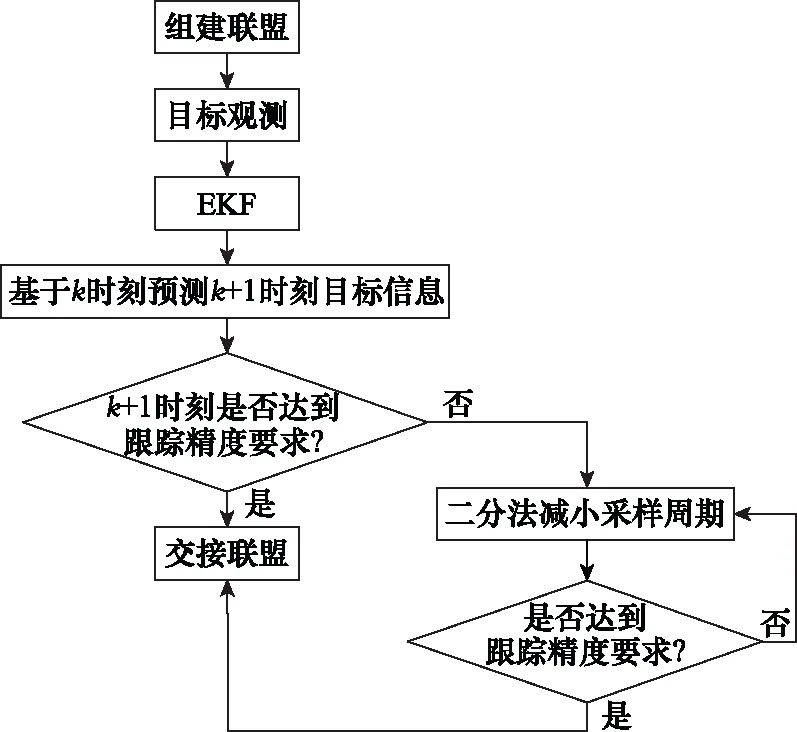
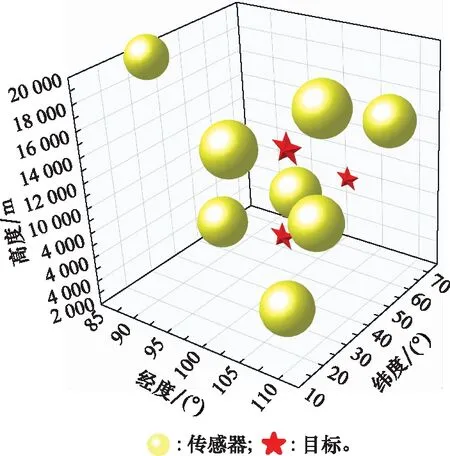
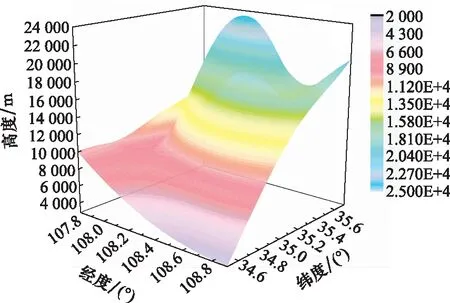
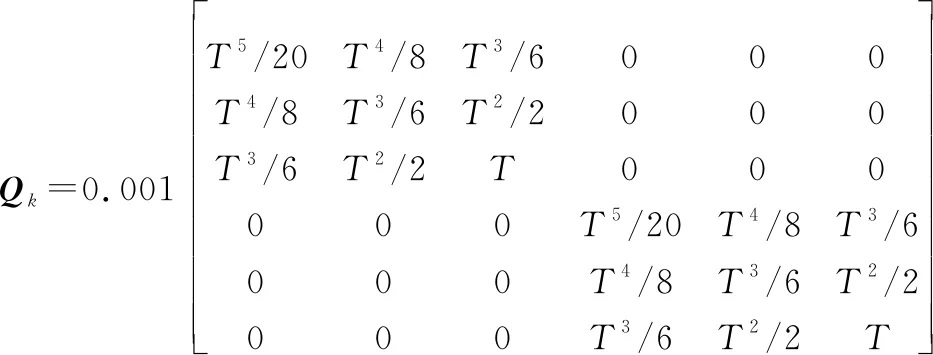
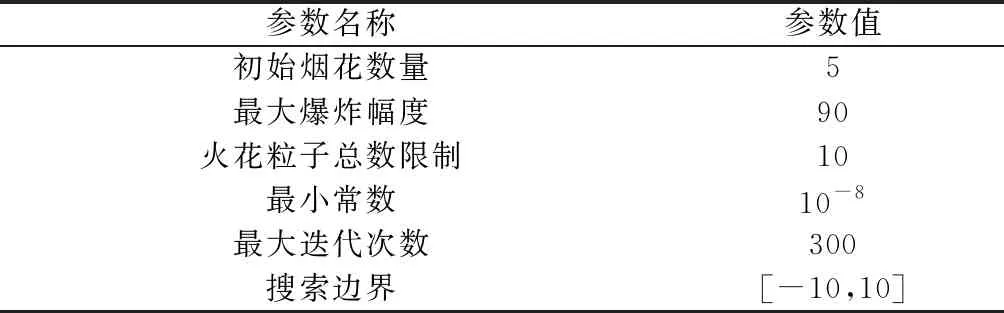
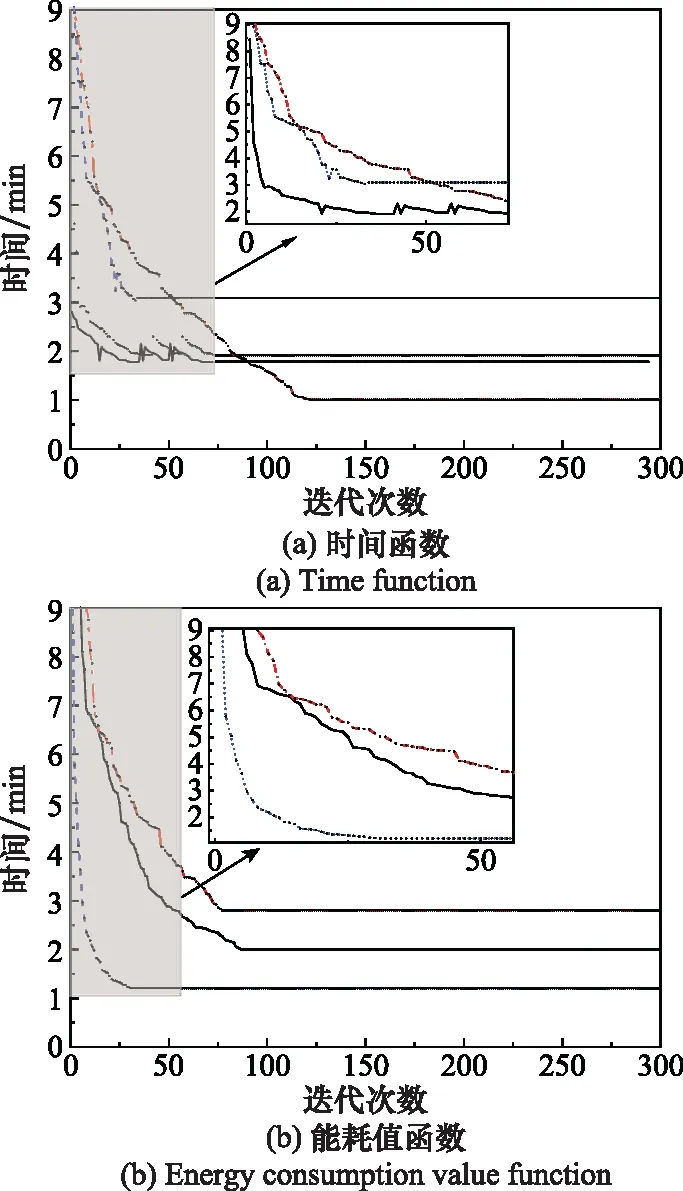
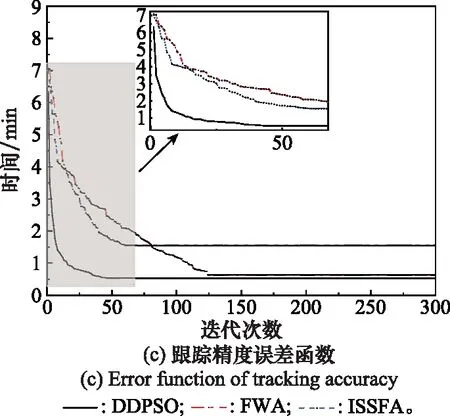
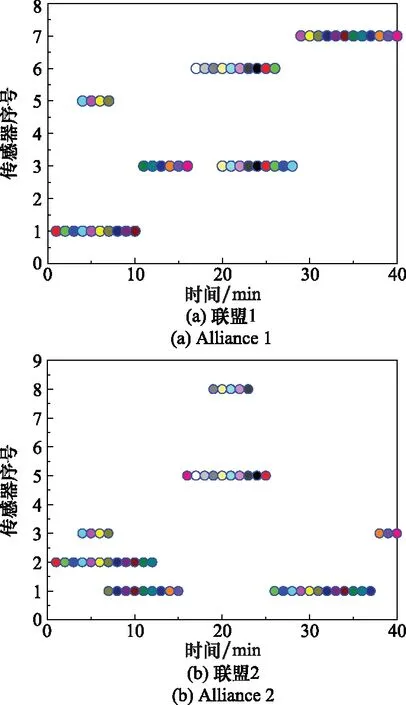
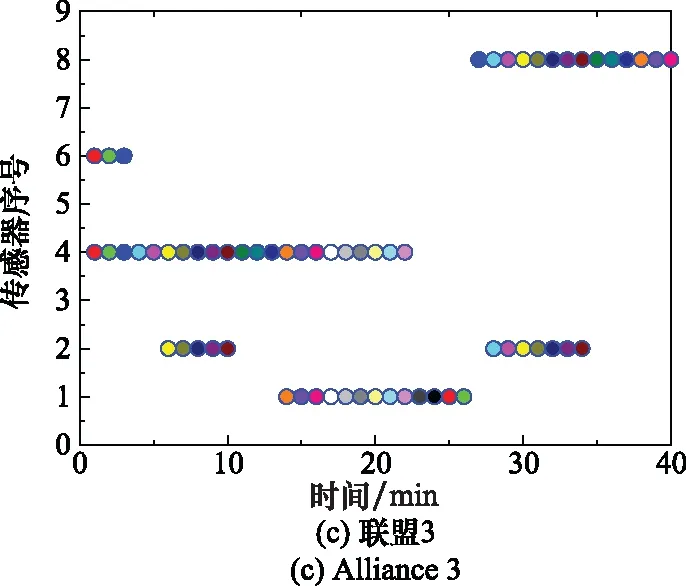
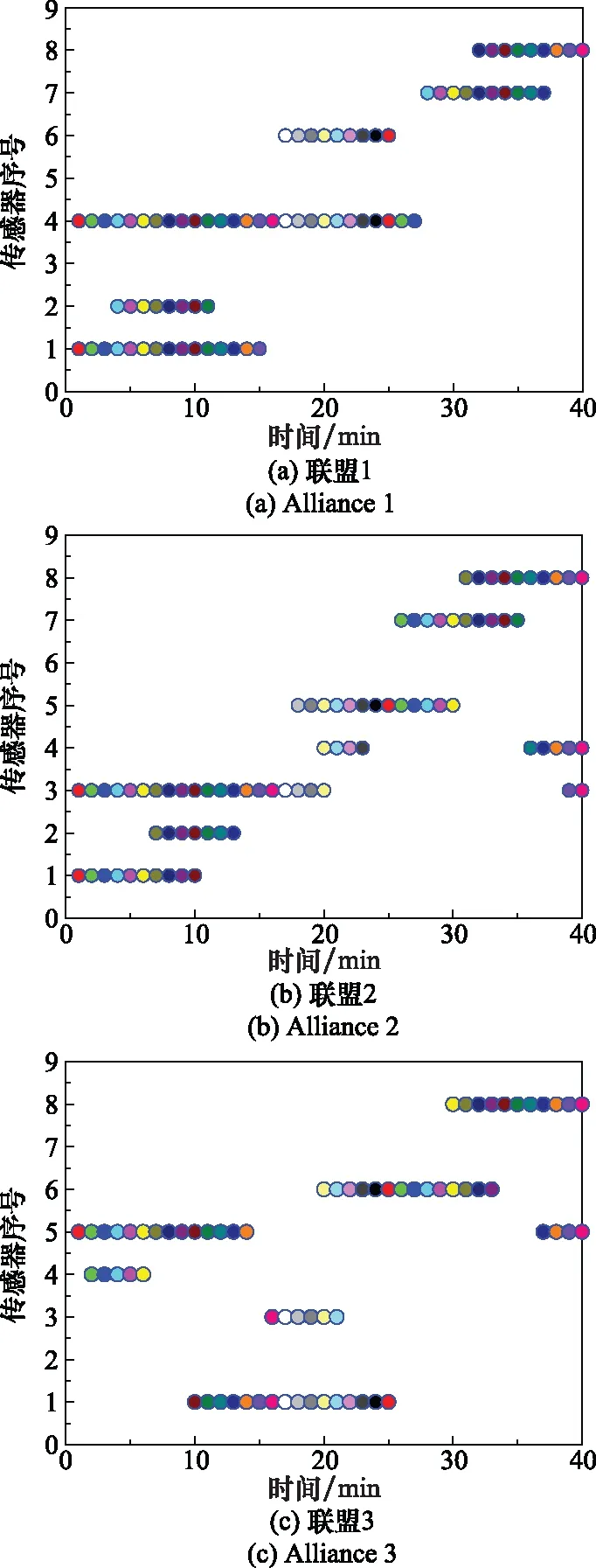
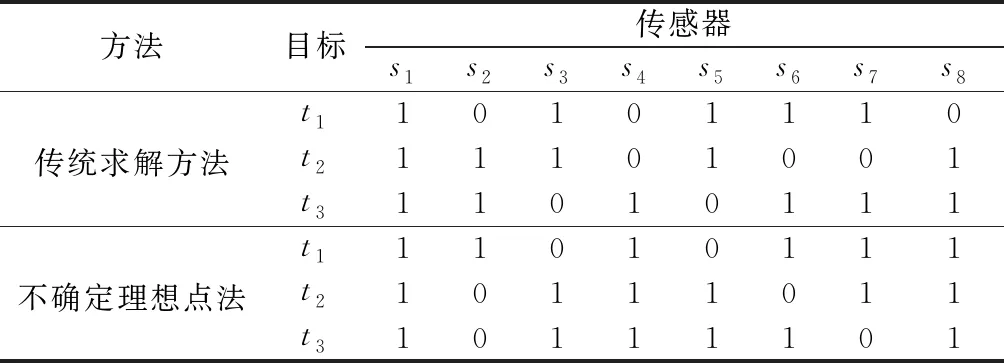
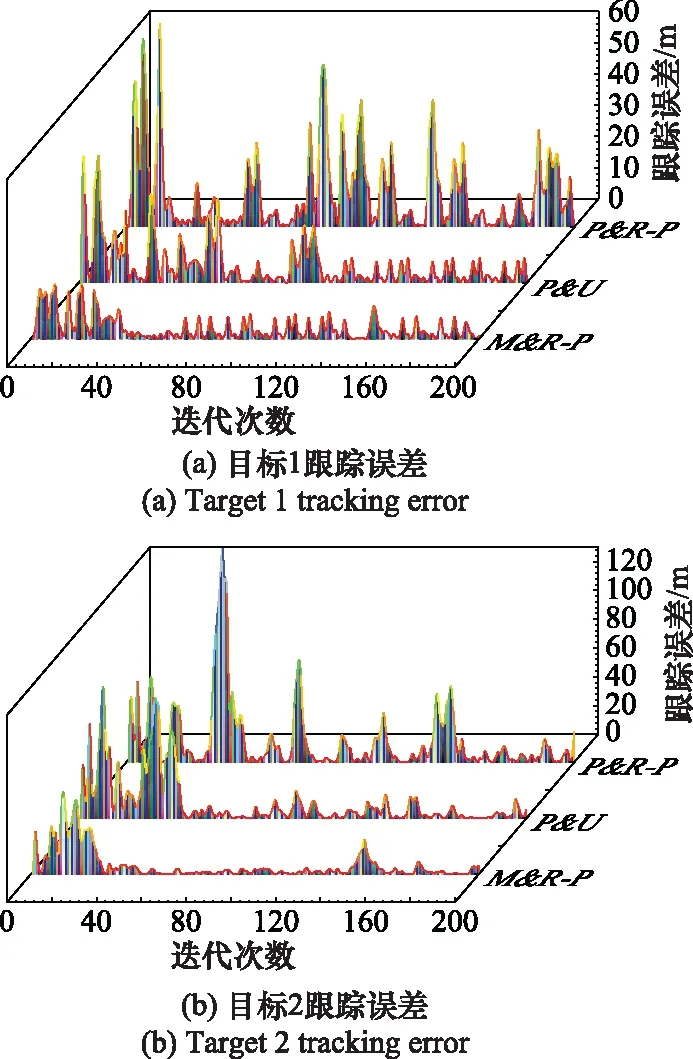
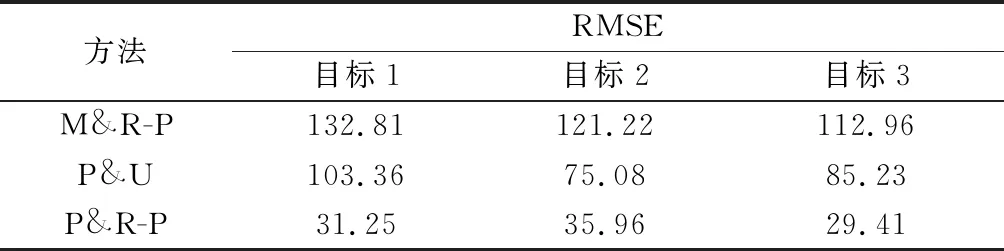
(期望准则,P准则)假设,为两个不确定变量,当且仅当E[]≤E[]或E[] (期望-方差准则,P准则)假设,为两个不确定变量,当且仅当E[]≤E[]或E[] 在实际工程应用中,期望-方差准则即P准则应用最为广泛,所以接下来的研究主要是在P准则下对不确定混合多传感器联盟进行求解。 不确定理想点法是指通过优化各个目标函数点到最优理想点的距离来实现不确定多目标规划问题向不确定单目标规划问题的转化。应用不确定理想点法,可以得到: (11) 在P准则下,不确定多目标规划问题的有效解的定义如定理1所述。 在P准则下,不确定单目标规划的最优解是不确定多目标规划问题的有效解。 且至少存在一个(1≤≤),使得 进一步可得 证毕 由上述证明可以得到不确定混合多传感器联盟的求解流程如图1所示。 图1 模型的求解流程Fig.1 Solution process of the model 通过不确定理想点法实现不确定条件下多目标规划问题向不确定单目标规划问题转化,具体形式为 (12) 式中:,和分别是(,),(,)和(,)在可行解集序列上的下界。 在P准则下,不确定单目标规划问题可以进一步转化为相应的等价确定模型: (13) 假设3个不确定变量,,服从线性不确定分布,之字形不确定分布和正态形概率分布:~L(15,18),~Z(08,12,16),~N(15,3),分别记作(),()和()。 以为例,通过邀请专家评估传感器的相对能耗值对组建多传感器联盟的影响,他们认为根据100%的可靠性,传感器的相对能耗值对组建联盟的影响将小于18。同时,专家认为根据0%的可靠性,传感器的相对能耗值对组建联盟的影响将小于15。假设传感器的相对能耗值影响程度在区间内与专家可靠性呈线性关系,其具体不确定度分布为 同理可得~Z(08,12,16)和~N(15,3)。 为了描述清楚,记 在P准则下,式(13)可以转化成如下确定单目标规划问题: (14) 根据3个目标函数的函数单调性可以得到(,),(,)关于和严格单调递增,(,)关于严格单调递减。因此可以将和的下界和的上界分别代入3个目标函数中。 将原问题转化成确定性问题时,本质上已经转化为一个确定的混合多传感器联盟组建问题,故设计基于ISSFA进行求解,改进算法通过建立峰值烟花和探索烟花的概念,并将前一个峰值火花作为下一代烟花。峰值火花可以确保所有具有最佳适应度的火花都成为峰值火花,峰值火花是其附近的最佳火花(最低适应度),而其附近的其他火花不能成为火花,从而确保下一代火花是其附近的最佳火花,而其附近的其他火花则是其附近的最佳火花。这种选择策略确保为下一代烟花和多样性烟花选择高质量的火花。为了增强烟花的整体探索能力,将所有相距最远的火花称为探索火花,同时也称为下一代烟花,以保持烟花的整体探索能力。在这个策略下选择的烟花是最边缘的火花,可以不断探索到边缘,改变基本烟花算法对初始值敏感、搜索精度低等不足。算法流程图如图2所示。 图2 ISSFA流程图Fig.2 Flow chart of ISSFA 在得到不确定混合多传感器联盟组建方案后,由于多传感器组成的预警探测网络覆盖范围较大,导致各个传感器不能及时响应作战需求,同时对目标状态的估计时刻在变化,处在一种动态变化环境之中,当时刻目标的实际跟踪精度达不到预测精度时,在联盟交接过程中极易导致跟丢目标,通过滤波算法预测+1时刻的目标运动状态,会出现在预测范围内无法实现对目标跟踪的情况,因此本文提出“预测再预测”机制,来降低联盟丢失目标的概率,更好地实现联盟的交接,即在时刻,由于传感器和目标状态估计处在动态变化中,当在预测范围内无法实现对目标的跟踪,则预测失败,需采用二分法减小时刻的采样周期,再次预测直到跟踪精度满足条件。混合多传感器联盟交接过程如图3所示。 图3 多传感器联盟更新过程Fig.3 Process of multi-sensor alliance updating 图4给出传感器及目标的部署信息,图5给出了部署在目标周围的传感器网络中的各传感器性能指标。 图4 传感器和目标的部署信息Fig.4 Sensors and targets deployment information 图5 传感器性能指标Fig.5 Performance indicators of sensor EKF算法初始参数设置如下。 观测噪声协方差矩阵: 系统噪声的协方差阵 基于ISSFA参数设置如表1所示。 表1 ISSFA参数设置 3.2.1 确定混合多传感器联盟组建仿真 为了验证该算法的有效性,选择了FWA和离散动态粒子群优化(discrete dynamic partical swarm optimization, DDPSO)算法进行比较分析和讨论。根据ISSFA参数设置,,和的解如图6所示。 图6 目标函数适应度值变化曲线Fig.6 Curve of target function fitness value 由图6可以看出3种算法都有相同的下降趋势,最终分别收敛到3.095 96,1.206 61和0.513 08。但这3种算法的收敛速度不同。ISSFA更快地收敛到最优值,FWA收敛速度慢,优化效果差,容易陷入局部最优解。与ISSFA相比,DDPSO能找到全局最优解,但收敛速度不如ISSFA快。结果表明,ISSFA防止陷入局部最优的能力强于DDPSO和FWA,更有利于解决复杂的优化问题,同时也证明了ISSFA的有效性。 在得到3个参数,和的解后,可以使用3个参数值计算在P准则下的多传感器联盟组建方案,图7给出了使用传统求解不确定多目标规划方法的多传感器联盟内传感器响应序号。图8给出了使用不确定理想点法的多传感器联盟内传感器响应序号。同时表2详细地列出了使用传统理想点法和不确定理想点法的多传感器联盟组建方案,其中0表示传感器不加入组建联盟,1表示传感器加入组建联盟。 图7 传统求解方法下的多传感器联盟内的传感器响应序号Fig.7 Sensor response number within multi-sensor alliance under traditional ideal point method 图8 不确定理想点法下的多传感器联盟内的传感器响应序号Fig.8 Sensor response number within multi-sensor alliance under uncertain ideal point method 表2 联盟组建方案 从图7、图8和表2中可以看出,采用传统理想点法和不确定理想点法两种方法均可以生成多传感器混合动态联盟,且传感器在全过程探测中都发挥了一定的作用,相比而言,采用不确定理想点法得到的混合多传感器联盟方案要整体优于采用传统理想点法得到的联盟方案,对于每一个目标组建的联盟中,8个传感器几乎没有出现闲置的情况,方案中的传感器利用率更高,有效地避免了传感器资源浪费,这样组建的联盟会大大提高对目标的跟踪精度,意味着在后续的探测过程中探测效果更好。 同时还可以看出对于同一个不确定问题,利用不同的理想点法得到的结果是不同的,主要原因为每种方法对于不确定性的处理顺序存在差异,但在P准则下,它们都是有效的多传感器联盟方案。但是不确定规划问题往往具有固有的不确定性以及各个目标函数之间不是完全独立,具有一定的相关性,因此采用了不确定理想点法来解决此类问题,仿真结果表明使用不确定理想点法确实在最终得到的结果上优于传统求解方法。 3.2.2 不确定混合多传感器联盟更新仿真 为了验证传感器联盟在更新过程中采用“预测再预测”机制的有效性,用本文提出的“预测再预测”(predict and re-predict, P&R-P)机制与“量测再更新”(measure and re-predict, M&R-P)和“预测即更新”(predict and update, P&U)两种更新机制进行对比,采样次数设为200,仿真结果如图9所示。 图9 采用不同更新机制时目标跟踪误差Fig.9 Target tracking error under different updating mechanisms 目标跟踪的位置均方根误差(root mean square error, RMSE)如表3所示,算法运行时间如图10所示。 表3 目标跟踪的位置RMSE 图10 采用不同更新机制时运行时间Fig.10 Algorithm running time under different updating mechanisms 图10和表3显示了采用不同更新机制时对3个目标的跟踪误差及算法的运行时间比较结果。结果表明,本文提出的更新机制产生的误差最小,而且收敛性明显优于其他两种机制,这是由于目标处在动态环境中,传感器对目标的状态估计形成的联盟能够提供精确的量测值,从而大大减小了跟踪误差,同时运行时间较短。 本文针对不确定多传感器混合联盟求解问题,主要工作及创新点如下: (1) 在给出了不确定性变量之间关系的定义后,将不确定性理想点方法应用于模型中,将不确定多目标规划问题转化为确定的单目标规划问题; (2) 提出基于ISSFA求得模型的有效解,通过与FWA和DDPSO的比较,得到了该算法的解,证明了该算法可以避免选择性能相似、质量低劣的粒子进行迭代,进而通过计算得到多传感器混合联盟组建方案; (3) 通过与传统方法和不确定理想点法的比较,不确定理想点法可以解决目标函数相关的问题,使最终联盟方案总体上优于传统方法; (4) 通过对比分析不同更新机制对3个目标的跟踪误差及算法的运行时间来验证传感器联盟在更新过程中采用“预测再预测”机制的有效性。











3 仿真实验
3.1 仿真参数设置
3.2 仿真参数设置


4 结 论
猜你喜欢
金桥(2022年7期)2022-07-22 08:32:10海外文摘·文学版(2022年4期)2022-04-14 21:55:16汽车观察(2021年11期)2021-04-24 20:47:38中学生百科·大语文(2021年2期)2021-03-08 02:28:59花火彩版A(2021年11期)2021-02-08 12:42:52数学物理学报(2020年1期)2020-04-21 06:00:54Coco薇(2017年2期)2017-04-25 20:47:09系统工程与电子技术(2016年7期)2016-08-21 13:59:02浙江共产党员(2015年11期)2015-05-23 12:05:41声屏世界(2014年6期)2014-02-28 15:18:09
