
基于深度学习的HRRP识别姿态敏感性分析
2022-03-11 02:30:06孙晶明虞盛康
系统工程与电子技术 2022年3期
孙晶明, 虞盛康, 孙 俊
(1. 南京电子技术研究所, 江苏 南京 210039; 2. 中国电子科技集团公司智能感知技术重点实验室, 江苏 南京 210039)
0 引 言
雷达自动目标识别(radar automatic target recognition,RATR)是雷达研究与应用的一个重要领域。高分辨距离像(high resolution range profile,HRRP)是实现实时目标识别的重要雷达特征,提供了用宽带雷达信号获取目标回波的距离维信息,反映了丰富的目标结构特征,如目标尺寸、散射点分布等,且易于获取和处理,因此成为国内外备受关注的研究热点。然而,使用HRRP进行目标识别仍然存在很多难点问题,其中姿态敏感性是影响HRRP-RATR性能的主要因素。
当高分辨雷达发射带宽足够大的信号时,目标回波在距离维上扩展至多个单元。采用散射点模型简化表示雷达目标,则HRRP中的尖峰是各距离单元内所有散射点的矢量合成,若散射点没有发生越距离单元变动,则各尖峰的相对位置关系不变;而散射点的后向散射性质随目标相对于雷达姿态角的改变而改变,因此尖峰幅度是随姿态快变的。这两个原因造成了HRRP的姿态敏感性,进而导致HRRP-RATR的关键步骤特征提取的性能很难得到保证。
针对HRRP识别的姿态敏感性问题,研究者们提出了三大类解决方法。第一类方法是提取姿态不敏感特征。这类方法是依据特定的准则函数提取目标的区分性特征。常用的有核主分量分析法等,能够降低数据维度,但所提特征的信息损失较大,识别性能受限。第二类方法是分角域处理。文献[12]从如何分角域的角度,研究了统计建模自适应分角域的方法,将姿态角连续分布的HRRP样本按不同角域切分为若干段分别处理,以缓解HRRP的姿态敏感性。文献[13]从如何有效地提取出可代表各角域样本中心的模板的角度,研究了HRRP平均模板或统计特征模板的生成方法,在一定程度上可提升目标识别性能。第三类方法是设计性能优良的分类器。文献[15]采用多个分类器融合,得到最终的识别结果,具有较强的鲁棒性。但这类方法设计难度较大,且并没有解决姿态敏感性问题。除了算法方面的研究,还有文献从理论上分析了姿态敏感性问题。文献[17]通过分析表明,闪烁现象导致HRRP波形发生剧变,使得各角域内的HRRP相似度下降,对传统分角域处理的识别方法的性能产生严重影响。
鉴于传统方法不能很好地解决HRRP的姿态敏感性问题,当前在图像识别领域大获成功的深度学习技术开始被广泛应用于HRRP-RATR任务中,特别是卷积神经网络(convolutional neural network,CNN)。深度网络模型区别于传统浅层机器学习模型的地方在于其深度网络结构、大规模的网络模型参数和训练模型所需的大数据条件。深度CNN的卷积层的作用类似于特征提取器,可以学习从低层到高层的丰富的内在结构特征。图像识别领域的大量成功案例显示出CNN在特征提取和表示学习中的强大能力。
本文借鉴CNN在图像识别中的应用,建立了适用于HRRP-RATR基于CNN的识别框架。在将深度网络模型应用于HRRP-RATR时,通过预处理或网络设计方式降低了幅度敏感性、平移敏感性、姿态敏感性。并针对实际应用时的数据录取需求,进行了详细的姿态角性能测试实验和结果分析。实验结果表明,CNN方法具有一定的抗姿态敏感性特性,可降低实际数据录取工作对样本姿态角覆盖的要求。
1 基于CNN的目标识别方法
CNN将多个卷积层进行堆叠,不仅具有传统神经网络的优势,如良好的错误容忍度、自适应性、自学习能力,而且具有自动特征提取的能力和权重共享的特性。
1.1 预处理
本文利用原始HRRP的幅度信息作为预处理的输入。如无特别说明,后文中的HRRP均指原始HRRP的幅度信息的简称。
针对HRRP的平移敏感性问题,人为生成训练数据的平移让CNN“看见”这种类型的变化。给定一个HRRP∈,生成的HRRP可写为

(1)
式中:是循环平移量,可正可负,意味着左循环平移或右循环平移;且′与有相同的尺寸。为了保证目标信号不越界,可以设定平移窗范围,这里选择[-200,200]个距离单元。值得一提的是,这种解决平移敏感性问题的方式同时也起到了数据增广的效果,增大了训练样本量。
针对HRRP的幅度敏感性问题,将每个HRRP按极差变换方式进行归一化处理:

(2)
因为CNN擅长处理图像,灰度图像的动态范围在[0,255]内,所以为了获得用于HRRP-RATR的CNN的最优性能,需要将所有HRRP的动态范围统一到[0,255]内。
针对HRRP的姿态敏感性问题,构造一个用于HRRP-RATR的内嵌了目标姿态角处理的网络,可提取不敏感于目标姿态的特征。
根据前面对预处理的描述可知,相比于传统预处理方法,本文采用的预处理技术更简单易用,但预处理对保证CNN的性能至关重要。
1.2 提出的CNN结构
本文提出的CNN结构如图1所示。

图1 提出的CNN结构Fig.1 The proposed CNN structure
CNN包含10个卷积层,每层都后接一个非线性激活层,以及4个最大池化层,2个1 024单元的全连接层,1个全连接的softmax输出层。输入是预处理后的HRRP,且每个HRRP的维度是1×1 024。输出是目标类型的近似后验概率分布,其显著特点是采用不同于一般图像识别的一维卷积核。
实际上,实验中已经尝试过将HRRP整形为4×256和32×32两种格式作为CNN的输入,但识别性能较差,主要原因可能是这样强行改变样本维度会破坏HRRP的内在结构特性。因此,在接下来的实验中,都采用1×1 024形式的HRRP作为CNN的输入。
2 姿态敏感性测试实验与分析
2.1 实验设置
实验数据采用某波段雷达录取的6种飞机目标P1~P6的宽带数据。目标姿态角范围为0°~180°,信噪比分布范围为10~50 dB。为了避免引入类间不平衡问题,将整个姿态角范围以2°为间隔划分为90个角域,每个角域随机抽取200个HRRP样本。这样,数据集总共有108 000个样本。
数据的预处理操作如第1.1节所述。主要训练参数如下:
(1) 迭代次数:200 000;
(2) 批处理大小:256;
(3) 初始学习率:0.01;
(4) 优化器:SGD;
(5) 正则化方式:L2。
实验运行环境为Caffe,GPU(GTX 1080),CPU(E5-2620 V4)。
2.2 实验结果
当训练集样本的姿态角缺失时,导致训练过拟合,严重影响网络的泛化性。实验目的是探究训练集样本姿态角覆盖与识别性能的关系,以指导实际应用中的数据录取工作。
2.2.1 散度角测试
将所有数据以10°为步长,每10°、20°、30°、40°、50°、60°只取2°数据训练,剩余数据测试,共分为6组。但这样划分数据集会造成第2~6组的测试集样本量明显多于第1组(实际上,第2~6组的测试集都包含第1组),为了方便进行各组实验结果的对比分析,需统一测试集样本量标准,因此6组实验中都以第1组的测试集作为标准测试集。具体数据量设置如表1所示。
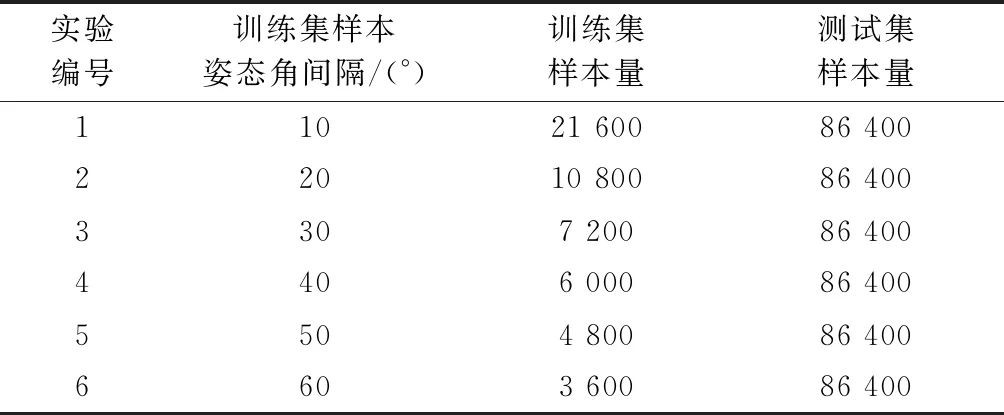
表1 实验数据设置
由于姿态角测试不可避免地与样本量因素耦合在一起,因此需结合全姿态角的样本量性能曲线进行分析,得到平均识别率曲线随训练集样本量的变化趋势如图2所示。平均识别率计算公式为
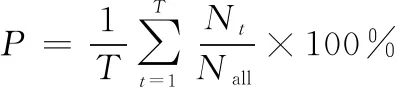
(3)
式中:表示第类正确识别的测试集样本量;表示第类总的测试集样本量;表示目标类型数。
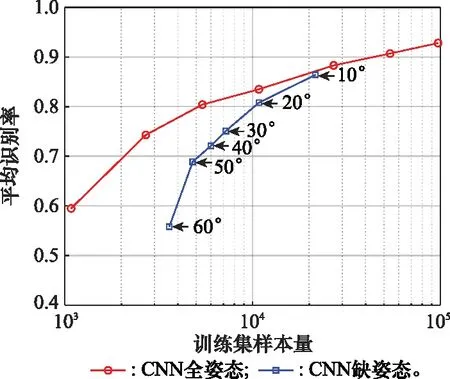
图2 识别性能与训练集样本量的变化关系Fig.2 Relationship between recognition performance and sample size of training set
通过对比可以看出,在保持训练集样本量相同的前提下,随着训练集样本姿态角间隔逐渐增大,缺姿态条件下的CNN性能相比于全姿态条件下的CNN性能恶化越来越严重。当训练集样本量为10 800且训练集样本姿态角间隔为20°时,CNN平均识别率达到80%;当训练集样本量为6 000且训练集样本姿态角间隔为40°时,CNN平均识别率达到72%。
为了进一步分析散度角情况下各目标姿态角域的识别性能,按姿态角域统计平均识别率的分布情况,如图3所示。可以看出,当训练集样本姿态角间隔为40°时,迎头方向仍能保持较好的识别性能,尾后次之,侧向较差。
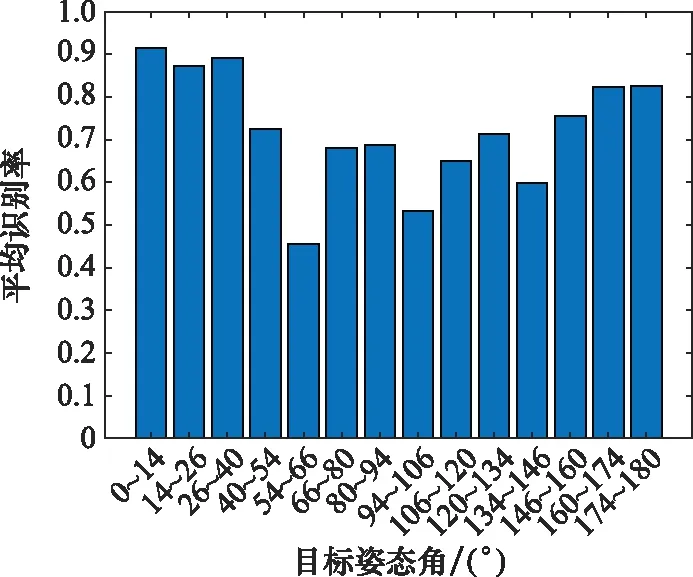
图3 训练集样本姿态角间隔为40°时的识别性能统计Fig.3 Recognition performance statistics of training set samples with 40° pose angle interval
采用t分布随机邻域嵌入(t-distributed stochastic neighbor embedding, t-SNE)方法将CNN提取的识别特征投影到二维平面上的分布,如图4所示。通过对比可以看出,随着训练集样本姿态角间隔变大,不同类型目标之间的分类界限逐渐模糊,识别性能逐渐下降。
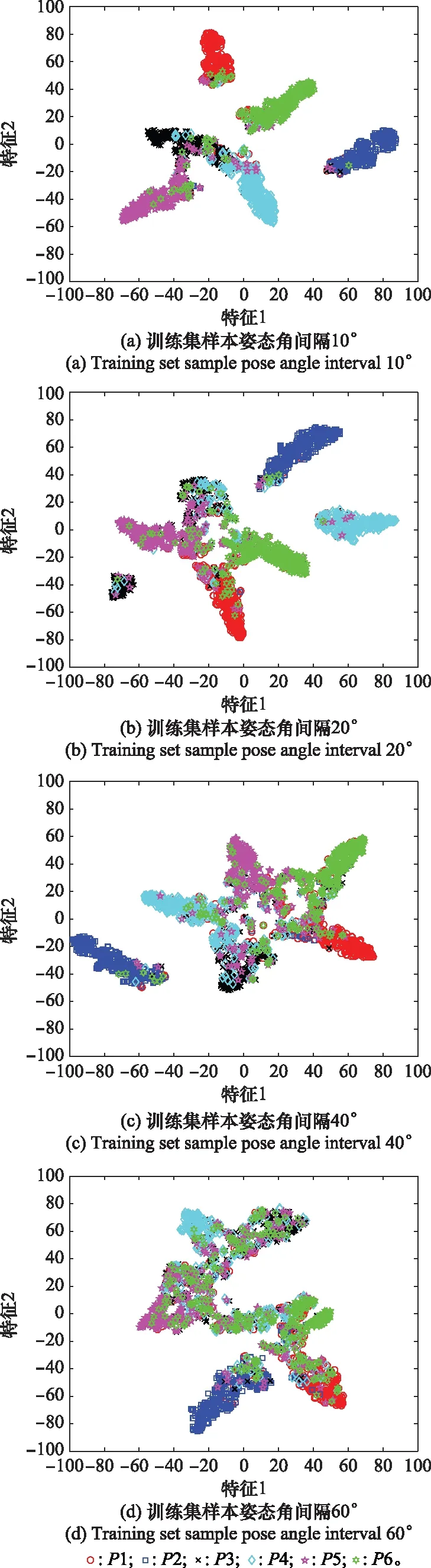
图4 特征二维投影分布对比Fig.4 Comparison of two dimensional projection distribution of features
2.2.2 跨角域测试
将所有数据按20°一个角域进行划分,只取0°~20°或80°~100°或160°~180°数据训练,剩余数据分角域测试,共分为3组。具体数据量设置如表2所示。

表2 实验数据设置
为了分析跨角域情况下各姿态角域的识别性能,按姿态角域统计平均识别率的分布情况,如图5所示。
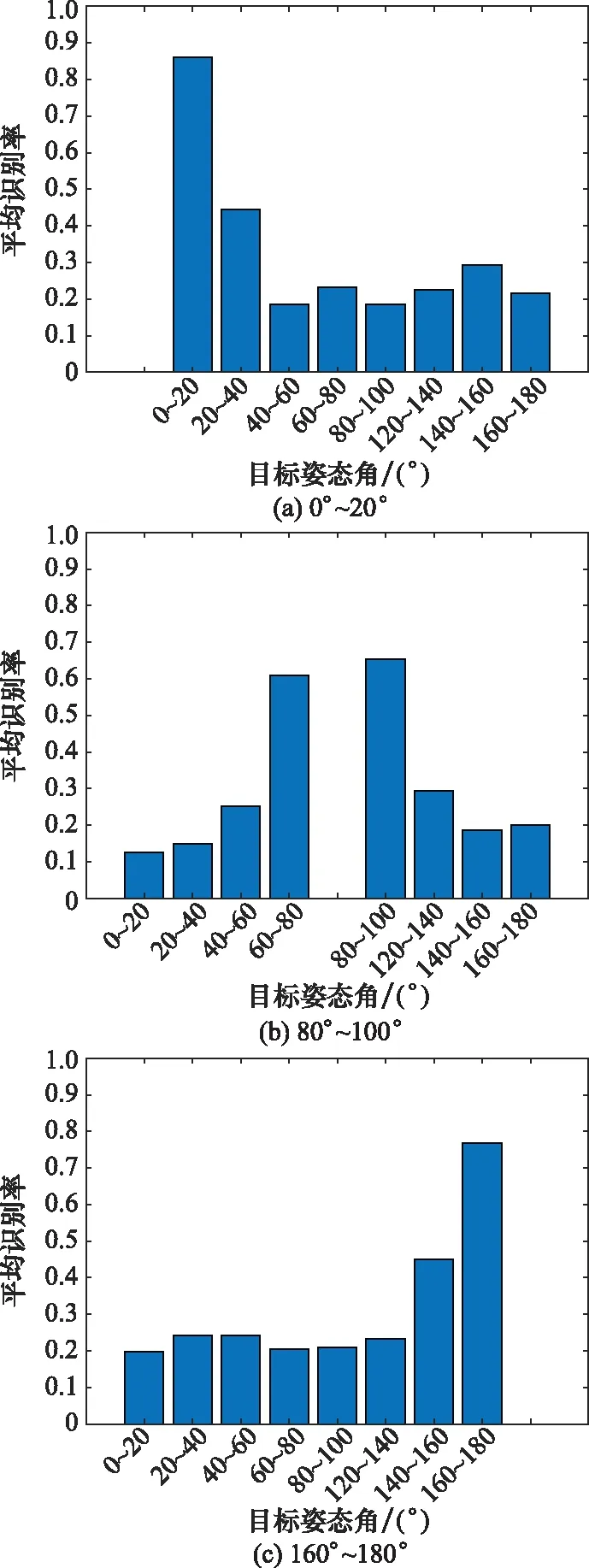
图5 只取特定角域数据训练时的识别性能统计Fig.5 Statistics of recognition performance when training with only specific angle domain data
通过对比可以看出,测试集样本中与训练集样本姿态角邻近的角域识别性能优于远离的角域识别性能。考虑到实际存在姿态角估计误差,因此当前采用的CNN模型不具备跨角域识别的能力。
2.2.3 姿态角标签测试
将所有数据按30°一个角域进行划分,但不是用机型作为标签,而是用姿态角域作为标签,分为6类。按9∶1比例均匀分成训练集和测试集,即训练集样本量为97 200,测试集样本量为10 800。
用姿态角域作为标签的识别混淆矩阵如图6所示,平均识别率为80%。从识别混淆矩阵上看,迎头和尾后方向的邻近角域的相关性较强,识别混淆性较大;而侧向的邻近角域的相关性较弱,识别混淆性较小。这也间接说明,在实测数据录取时,可以适当放宽迎头和尾后方向的训练集样本姿态角间隔(样本相关性强),而对于侧向仍需要较密集地录取数据(样本相关性弱)。
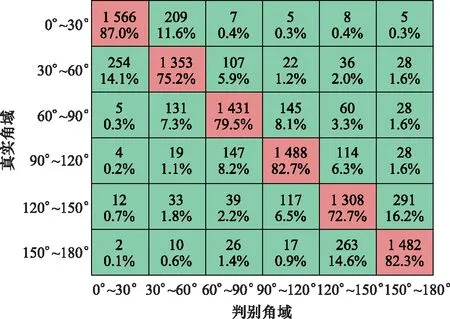
图6 用姿态角域作为标签的识别混淆矩阵Fig.6 Recognition confusion matrix using pose angle domain as label
采用t-SNE方法将CNN提取的识别特征投影到二维平面上的分布如图7所示。可以看出,各姿态角域的点集呈现较明显的簇分布,邻近角域的点集交叠区域较大,这也印证了识别混淆矩阵的结果。
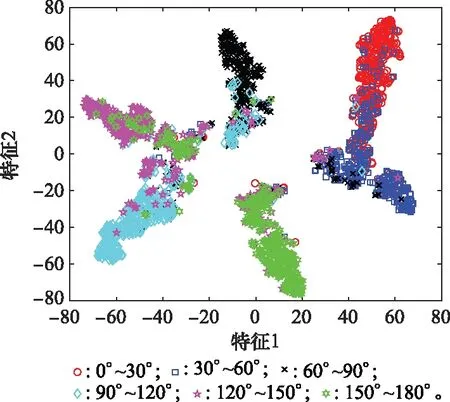
图7 特征二维投影分布Fig.7 Two dimensional projection distribution of features
2.3 实验结论
根据实验结果,形成如下基本结论。
(1) 对于信噪比大于10 dB的宽带HRRP数据,在不考虑拒判的前提下,当训练集样本姿态角间隔为20°且训练集样本量在10 000以上时,可满足6类飞机的识别率大于80%的要求。
(2) 考虑对飞机目标姿态角估计误差约为10°,在训练集样本姿态角间隔30°以内,通过增大训练集样本量,可以提升识别性能。
(3) 当训练集样本姿态角间隔为40°时,迎头方向仍能保持较好的识别性能,尾后次之,侧向较差。
(4) 在实测数据录取工作中,当全姿态数据的录取条件不具备时,可以适当放宽迎头和尾后方向的训练集样本姿态角间隔的限制到30°,而对于侧向仍需要较密集地录取数据(10°以内),并在可录取的姿态角域内尽可能地增大训练集样本量到10 000以上。
3 结 论
本文提出了一种新颖的基于CNN的HRRP-RATR方法,并针对实际应用时的数据录取需求,在实测HRRP数据上进行了详细的姿态角性能测试实验和结果分析。实验结果表明,精巧设计的CNN方法具有一定的抗姿态敏感性特性,可降低实际数据录取工作对样本姿态角覆盖的要求。并通过分析获得了4条具有实用价值的结论,可为工程化应用提供指导。
猜你喜欢
内蒙古统计(2021年4期)2021-12-06 02:49:20
学生天地(2020年3期)2020-08-25 09:04:16
航空工程进展(2019年6期)2019-12-31 10:49:40
长沙航空职业技术学院学报(2019年3期)2019-04-24 11:09:18
测控技术(2018年4期)2018-11-25 09:46:52
苏州科技大学学报(自然科学版)(2018年4期)2018-11-21 03:32:34
汽车观察(2018年9期)2018-10-23 05:46:40
中国自行车(2018年8期)2018-09-26 06:53:44
上海精神医学(2017年5期)2017-11-29 06:03:10
数学年刊A辑(中文版)(2015年1期)2015-10-30 01:55:48
