多波束测深系统与侧扫声呐在水电站坝前淤积测量中的应用
2022-03-08 09:54:54李成旭侯欣欣卞玉霞
电力勘测设计 2022年2期
李成旭,侯欣欣,王 月,卞玉霞
(1.成都信息工程大学,四川 成都 610225;2. 黄河水利委员会黄河水利科学研究院,河南 郑州 450000;3.中国电建集团昆明勘测设计研究院有限公司,云南 昆明 650000)
0 引言
水电站经过长期运行,坝前水工建筑物的淤积是一种很常见的现象。电站建成使用后,水下建筑物长期处于水下,泥沙、木头及流水长期对水下建筑物的破坏造成材质劣化、功能降低等现象[1]。加上泥沙、木头等在坝前的堆积,严重影响水电站大坝的安全及服役年限。
大型水电站一般会在汛期前后对坝前做水下地形测量。传统的水下地形测量主要使用测深杆、测深锤及单波束测深仪进行测量[2]。在水电站坝前淤积测量中,该方法不仅精度低、效率慢,而且不能准确地反映坝前淤积情况。本文以某水电站为例,运用多波束测深系统、侧扫声呐对坝前进行淤积测量,建立水下地形三维模型,生成二维影像,为水电站坝前水下建筑物的修补及淤积清理提供数据支撑。
1 仪器设备组成及原理
1.1 多波束测深系统组成及原理
多波束测深系统自上世纪70年代问世以来,就在水下测量中得到广泛应用。相较于单波束测深仪,多波束测深系统的出现是水深测量的又一场革命[3]。
多波束测深系统一般由多波束测深仪、GNSS定位设备、三维姿态传感器、罗经、声速剖面仪等配套设施组合而成,如图1所示。本文使用的多波束测深系统通过采用波动物理原理的“相控阵”方法可以精确定位256个波束中每个波束的精确指向。其指向性可控制到0.5°。根据每个波束位置上的回波信号用振幅和相位方法确定深度。多波束测深仪测深是利用超声波的发射原理来进行测量的,利用换能器进行声波的发射和接收[4]。信号接收单元由n个成一定角度分布的相互独立的换能器完成,每次能采集到n个实测数据信息。在实时动态差分法(real-time kinematic,RTK)技术的加持下,能够准确地获得水下地形点的平面坐标[5]。其配置的三维姿态传感器能够及时校正船只在水下行驶由于上下起伏与左右摇晃造成的误差,声速剖面仪可以改正由于水下声速不同造成的误差。
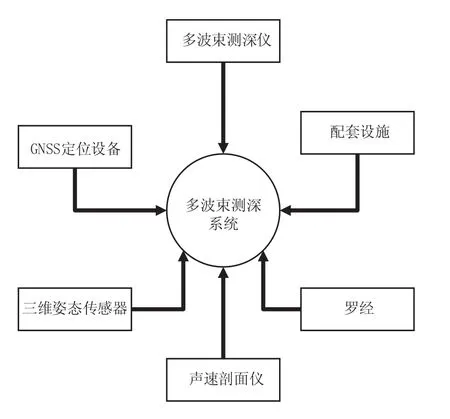
图1 多波束测深系统组成图
1.2 侧扫声呐组成及原理
侧扫声呐是一种主动式声呐,从安装在船体两侧(船载式)或安装在拖鱼内(拖曳式)的换能器中发出声波,利用声波反射原理获取回声信号图像,根据回声信号图像分析水底地形、地貌和障碍物,检查水下物体的表面结构等[6]。
本文采用的是拖曳式侧扫声呐。如图2所示,其系统主要由三部分组成:拖鱼、传输电缆及工作站组成。①拖鱼,该单元功能为发射脉冲信号并接受来自水底的回波信号;②传输电缆连接工作站与拖鱼,用于传输实测数据;③工作站分为硬件与软件两个部分,主要是实时控制拖鱼的探测参数,监视拖鱼的探测信号、探测数据与定位数据的融合、提供高压电源等功能。

图2 侧扫声呐工作原理示意图
2 应用实例
本文检测的水电站坝址枢纽主要由拦河坝、冲砂底孔、河床式厂房、泄洪洞、泄洪闸等组成。工程为二等大(2)型,主要建筑物级别为2级,地震设防烈度为7度。电站装机4台,总容量660 MW,设计年发电量32.35亿kWh。拦河坝为砼重力坝,坝顶总长222.5 m,最大坝高106 m。水库正常蓄水位660 m,库容3200万 m3,调节库容800万m3,水库回水长度约11 km,水面面积1.57 km2。
坝前水深40 m以上,加上机组一直在运行发电,传统的作业手段不能满足要求,本次作业拟采用多波束测深系统与侧扫声呐联合查明坝前淤积情况。
2.1 现场实测
经现场踏勘,在合适的地方下船,采用多波束水下探测技术和侧扫声呐水下探测技术对坝前区域进行水下检查,查明坝前淤积情况,水上作业示意图如图3所示。

图3 水上作业示意图
以定制冲锋舟为多波束探测系统的载体,安装多波束探测系统换能器、表面声速探头、固定罗经、三维姿态传感器及RTK移动站,各项安装须确保设备与船体摇晃一致。船体坐标系统定义船右舷方向为X轴正方向,船头方向为Y轴正方向,垂直向上为Z轴正方向。分别量取RTK天线、定位罗经天线、换能器相对于参考点(三维运动传感器中心点)的位置关系,往返各量一次,取其中值。多波束水下探测测线沿等深线布置,探测工作船平行于等深线行进至坝前进行全覆盖扫测,相邻测线覆盖范围重合至少20%,对于重点部位进行多次覆盖扫测[7]。
为进一步提高水下探测成果的可靠度,在作业过程中,需根据现场条件适时进行声速剖面的测量,且两相邻声速剖面采集时间间隔不应超过6 h。
多波束测量完成后进行侧扫声呐测量,对侧扫声呐进行安装调试后,布置测线,先对坝前区域进行全覆盖测量,再对重点部位进行多次扫测。其成果对多波束测量成果进行印证。
2.2 成果分析
利用本次多波束测深系统采集到的点云数据生成如图4所示的三维模型及图5所示的地形图,利用侧扫声呐采集数据生成了如图6所示的坝前区域二维影像图。

图4 坝前区域三维模型图
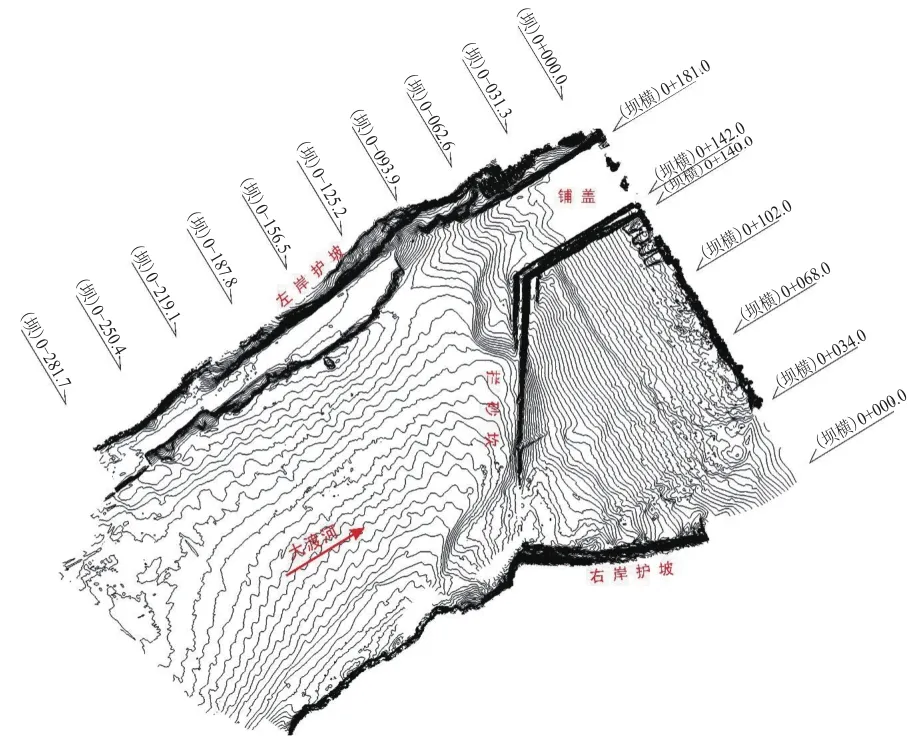
图5 坝前区域地形图
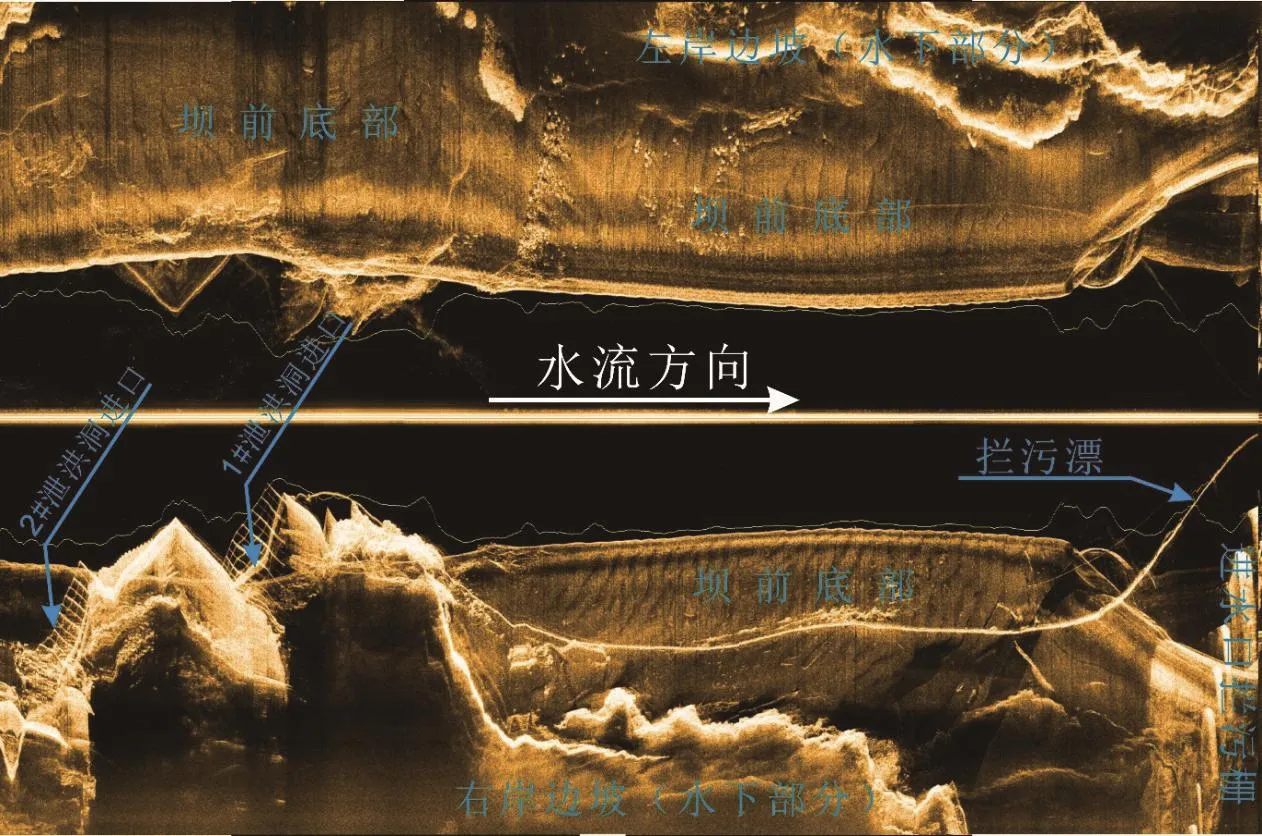
图6 坝前区域侧扫声呐成果图
从图4坝前区域三维模型图可以看出,发电机组拦沙坎内到机组进水口的水下高程呈一个递减的趋势,在侧扫声呐成果图中下半部分可以很明显地看到颜色从明到暗的变化。在其他地方的亮色区域也与多波束测深系统得到的成果相吻合,印证了多波束测深系统得到的成果。
通过与水电站修建时的设计高程和水电站提供的2017年实测数据进行对比,形成如图7所示的坝前区域对比图。由坝前区域对比图可知,进水口前淤积主要集中在1#机组进水口前,淤积厚度较2017年增加了4.7 m,2#机组对应的拦沙坎下游5~2 5m范围内淤积厚度较2017年增加了1.4~3.3 m,4#机组对应的拦沙坎上游淤积厚度较2017年增加了2.1~3.0 m;泄洪闸铺盖前桩号(坝)0-094.0处淤积厚度较2017年最大增加了5.8 m。
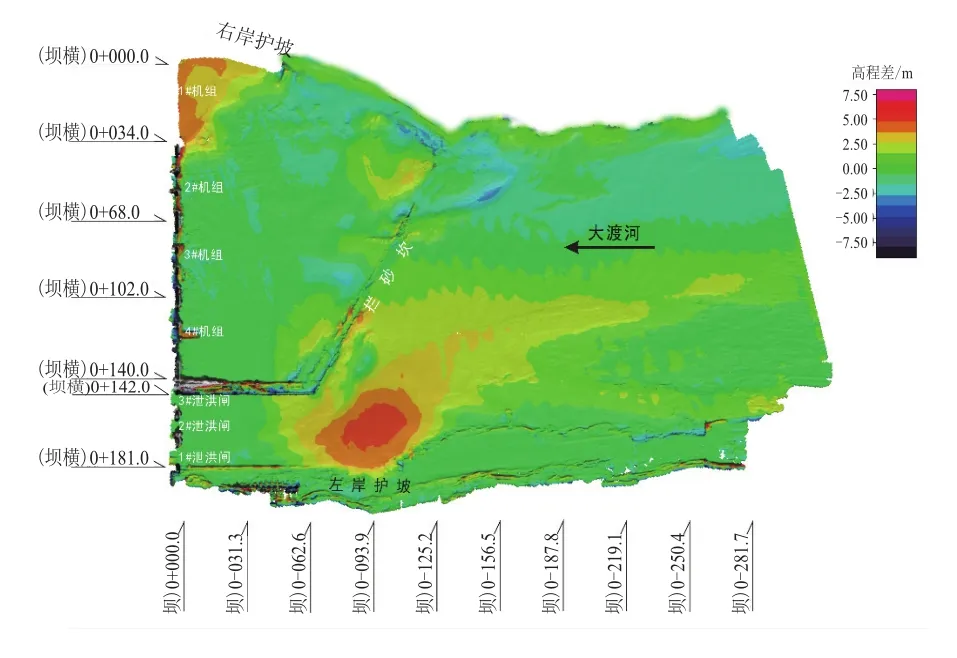
图7 坝前区域对比图
通过绘制断面图,可以更直观地看到淤积情况,本文以1#机组为例,绘制断面图,如图8所示。从断面图可以直观地看出,1#机组进水口前淤积厚度较2017年增加了4.6~4.8 m,而1#机组进水口设计高程为612 m,还剩7.3 m。
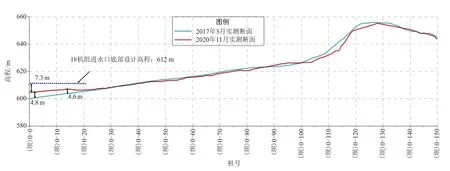
图8 1#机组断面图
通过本次水下检测,查明了坝前淤积情况,为水电站的淤积清理提供了有力的数据支撑。其主要结论如下。
1)进水口至拦沙坎区域
①淤积主要集中在1#机组进水口前,1#机组进水口前高程为604.6~604.8 m,相较于2017年淤积厚度为4.7 m。
②2#机组进水口前高程为600 m,淤积厚度相较于2017年无明显变化,2#机组对应的拦沙坎下游5~25 m范围内淤积厚度较2017年增加了1.4~3.3 m。
③3#机组前高程为600 m,淤积厚度较2017年无明显变化。
④4#机组前高程为600 m,4#机组对应拦沙坎下游20 m范围内淤积厚度较2017年增加了1.8 m。
⑤发电机组进水口底部设计高程612 m,1#机组前底部高程604.7 m,距1#机组进水口剩余7.3 m,2#~4#机组进水口前底部高程600.2 m,距机组进水口底部11.8 m。
2)拦沙坎外
①2#、3#机组对应的拦沙坎上游淤积厚度较2017年无明显变化,拦沙坎上游侧高程631.1~635.0 m,已经超过拦沙坎顶部。
②4#机组对应拦沙坎上游侧实测高程为627 m,距拦沙坎顶部3 m,4#机组对应的拦沙坎上游淤积厚度较2017年增加了2.1~3.0 m。
③泄洪闸铺盖无明显淤积存在,泄洪闸铺盖上游桩号(坝)0—094.0处淤积厚度较2017年最大增加了5.9 m。
3 结论
本文以水电站坝前淤积测量为例,重点介绍了多波束测深系统与侧扫声呐应用,得到了以下几条结论。
1)查明了水电站坝前区域淤积分布情况,通过与以往数据和水电站设计高程相对比,准确地得到了淤积厚度与淤积位置,为水电站后期处理提供可靠的数据支撑。
2)与传统的作业手段相比,多波束测深系统的全覆盖、高精度、高效率测量得到的三维立体模型可以直观、真实地反映水下地形地貌。
3)侧扫声呐与多波束的结合测量,两者进行印证互补,共同完成水电站坝前区域水下的测量工作,极大地提高了数据的准确性。
猜你喜欢
中学生数理化·八年级物理人教版(2022年9期)2022-10-24 07:03:52
保健医苑(2022年5期)2022-06-10 07:46:06
肝博士(2020年5期)2021-01-18 02:50:28
海洋信息技术与应用(2020年3期)2020-08-24 07:25:10
小学科学(学生版)(2019年10期)2019-11-16 08:55:14
山西建筑(2019年14期)2019-08-17 08:13:44
水电站设计(2018年1期)2018-04-12 05:32:09
水利规划与设计(2017年11期)2017-12-23 06:34:20
华北水利水电大学学报(社会科学版)(2015年3期)2015-02-28 15:08:21
肝博士(2015年2期)2015-02-27 10:49:51