
Accelerated Landweber iteration based control allocation for fault tolerant control of reusable launch vehicle
2022-03-08 03:25:58ChngzhuWEIMingzeWANGBogngLUJilunPU
Chinese Journal of Aeronautics 2022年2期
Chngzhu WEI ,Mingze WANG ,Bogng LU ,Jilun PU,*
a School of Astronautics,Harbin Institute of Technology,Harbin 150001,China
b Beijing Institute of Space Long March Vehicle,Beijing 100039,China
KEYWORDS Accelerate Landweber iteration;Adaptive non-singular fast terminal sliding mode control;Control allocation;Fault tolerant control;Redistribution mechanism
Abstract This paper presents a novel Fault Tolerant Control (FTC) scheme based on accelerated Landweber iteration and redistribution mechanism for a horizontal takeoff horizontal landing reusable launch vehicle (RLV).First,an adaptive law based on fixed-time non-singular fast terminal sliding mode control (NFTSMC),which focuses on the attitude tracking controller design for RLV in the presence of model couplings,parameter uncertainties and external disturbances,is proposed to produce virtual control command.On this basis,a novel Control Allocation (CA) based on accelerated Landwber iteration is presented to realize proportional allocation of virtual control command among the actuators according to the effective gain as well as the distance from the current position of actuator to corresponding saturation limit.Meanwhile a novel redistribution mechanism is introduced to redistribute oversaturated command among healthy actuators(non-faulty or redundant).The proposed method can be applied to a real-time FTC system so that the controller reconfiguring is not required in case of actuator faults.Finally,the effectiveness of the proposed method is demonstrated by numerical simulations.
1.Introduction
Horizontal takeoff horizontal landing RLV is considered to be a novel vehicle with reduced flight costs and reliable space access because of its capacity of multi-launching of payload.However,the attitude control for RLV is subjected to complex flight environment and aerodynamic characteristics,such as high nonlinearity,serious uncertainty and strong coupling.Especially in the reentry stage,the multi-variant control surfaces,which can improve the flight performance of RLV,increase the possibility of failure.The control system without any fault tolerance capability may degrade mission performance or even cause loss of vehicle stability upon the occurrence of an abrupt actuator fault.Hence,RLV control system should be designed to have excellent robustness and reconfiguration capacity.
A robust flight controller which can generate virtual control command is an important guarantee for RLV to achieve safe flight and complete predetermined flight mission.In recent years,great efforts have been made on the RLV control schemes to improve flight robustness,such as finite-time model-assisted active disturbance rejection control,backstepping control technique.As a widely used control scheme for RLV,Sliding Mode Control (SMC) has high precision and strong robustness against bounded external disturbances.To further obtain better performances,Terminal Sliding Mode Control (TSMC) is proposed.However,the singularity problem and the slow convergence rate when the system state is far away from the equilibrium point are two major problems encountered by the traditional TSMC.Moreover,the chattering phenomenon in traditional SMC may damage actuators or even the whole system.The conventional way to alleviate chattering phenomenon is to use ‘‘sigmoid ones”,‘‘saturation”or‘‘hyperbolic tangent function”as a continuous control function.With these methods,the SMC can achieve the reduction of chattering at the expenses of the robustness and control accuracy.On this basis,an adaptive SMC method is proposed to overcome above deficiencies by counteracting disturbances and uncertainties through online real-time gain adjustment of traditional SMC.However,the traditional adaptive law has slower convergence.
Generally speaking,FTC can be categorized into active FTC and passive FTC.Passive FTC is based on the robust controller and has certain fault tolerance ability.Unlike the passive FTC,the active FTC scheme reacts to the actuator faults by reconfiguring the actual control command based on a Fault Detection and Diagnosis(FDD)method,so that the stability of the system can be maintained.As an effective method to manage actuator redundancy,CA can realize distribution of virtual control command by only adjusting the CA matrix.Therefore,the reconfiguration of controller structure is unnecessary for a redundant system.The pseudo inverse method is the focus of early researches,but this method does not take into account the actuator input constraints.Meanwhile,an online sliding mode CA method has been proposed for fault-tolerant control.The daisy-chain CA strategy is presented for systems with redundant groups of controllers.Moreover,a least-square CA is proposed for the flight control system,and a robust second-order cone CA is proposed.However,the aforementioned CA methods cannot be represented in an explicit form.At the same time,it is difficult to satisfy real-time computation requirements due to the large time consumption and large number of iterations in seeking optimal solution and the limitation of computing resources.
Under such background,a novel FTC method is designed in this study by integrating an adaptive fixed-time NFTSMC with CA method based on accelerated Landweber iteration and redistribution mechanism,which can improve the flight performance of RLV when input redundancy is available.A robust adaptive fixed-time NFTSMC is designed in the context of uncertain parameters,external disturbances,strong nonlinearity and couplings.Meanwhile,a novel CA method without reconfiguration of the controller structure is proposed.This CA in an explicit form can distribute virtual control commands among healthy actuators according to the effective gain as well as the distance from current position of actuator to corresponding saturation limit.In order to process the actuator saturation,a novel redistribution scheme is proposed.This paper is probably the first attempt to design an accelerated Landweber iteration based CA for RLV,the main contributions are summarized as follows:
(1) A novel CA method based on accelerated Landweber iteration is proposed.The virtual control command is distributed among the actuators proportionally according to effective gain as well as the distance from actuator current position to corresponding saturation limit.
(2) For redundant control system,a redistribution mechanism is proposed to realize the accurate tracking of control command when input redundancy is available.The saturated command is redistributed to the healthy actuators by using the saturation gain matrix and CA method based on accelerated Landweber iteration.
(3) For the RLV model with multiple disturbances,a fixedtime non-singular fast terminal sliding mode controller is designed,in which an adaptive law is introduced to realize the fast estimation of total disturbances.
This paper is organized as follows.Section 2 introduces the dynamic equation concerning actuator fault of RLV.Section 3 presents a fixed-time non-singular fast terminal sliding mode controller based on an adaptive law,which provides the virtual control command in three channels.In Section 4,a novel CA method is derived to distribute control command proportionally,and a novel redistribution mechanism is proposed to redistribute the oversaturated command among other healthy actuators upon the occurrence of actuator saturation.Simulations are given in Section 5 and conclusion is provided in Section 6.The structure of the proposed scheme is shown in Fig.1.
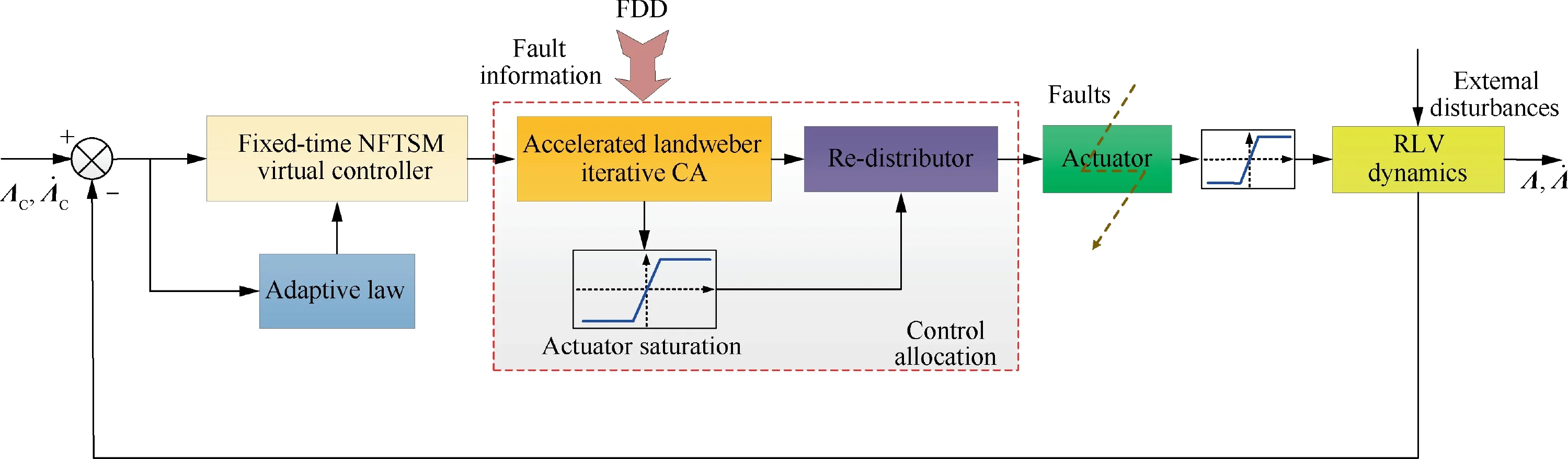
Fig.1 Structure of the proposed scheme.
2.Problem formulation and preliminary
2.1.Problem formulation
The dynamics model of RLV is given by:

where=+,denotes the radius of the earth andis the height.,anddenote the drag force,the lateral force and the lift force,respectively.θ and φ denote the latitude and the longitude,respectively;is velocity,γ and ψ denote flight path angle and heading angle,respectively;is mass of RLV,ωis earth rotation velocity.
The rotational dynamic and kinematic equations can be described as Eq.(2).
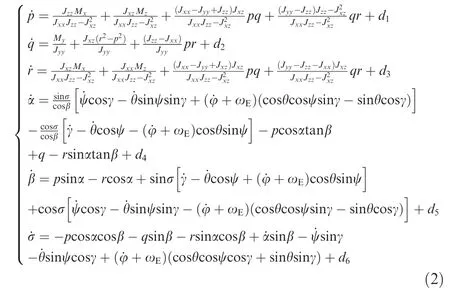
where,andare the angular velocity of roll,pitch and yaw,respectively.α,β and σ represent the angle of attack,sideslip and the bank angle,respectively. M(=,,) represents the aerodynamic moment,and J(=,,;=,,) denotes the moment of inertia.
Eq.(2) can be further simplified as

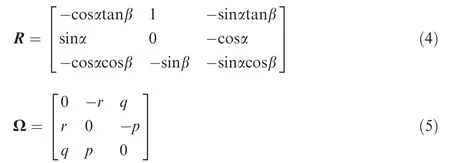
where Λ=[α,β,σ]denotes the attitude vector,ω=[,,]denotes the attitude angular velocity vector,J ∈Ris the inertia matrix,Δf ∈Rrepresents the mismatched disturbance which is caused due to the omission of the translational terms and the angular velocity of the earth in the complete kinematic equations.The matched disturbance Δd ∈Rcan be considered as external disturbance imposing on dynamic equations.M ∈Rrepresents the torque,R denotes coordinate transformation matrix,and Ω represents the linear skew symmetric matrix operator for vector ω,which can be expressed as

The objective in this paper is to propose a FTC method such that the tracking error state zand zconverge to a neighborhood of zero in a fixed-time in spite of the actuator faults,actuator saturation and external disturbances.And the virtual control command of three channels can be distributed among the actuators proportional whether or not a failure occurs.
2.2.Preliminary
Considering the following system

where∈Rand():→Ris a nonlinear function.
=0-(,)-,..(,)=0∀≥(),:R→R∪ {0 }--.
-().,()<.
,:→().=-:
(1) Existence:For every y ∈Y there is (at least one) x ∈X such that Kx=y.
(2) Uniqueness:For every y ∈Y there is at most one x ∈X with Kx=y.
(3) Stability:The solution x depends continuously on y;that is,for every sequence (x)⊂X with Kx→Kx(n →∞),it follows that x→x(n →∞).
Equations for which (at least) one of these properties does not hold are calledor.where 0 <<1,>1,,>0.Thus,the system (12) is said to be fixed-time stable and the settling time is bounded by
3.Design of the controller
First of all,a fixed-time NFTSM surface is developed as:

where μ,μ>0.andare parameters satisfying>1 and 1 <<2-1/.
Based on the sliding mode surface(17)and Assumption 1,a sliding mode controller with adaptive law is designed as

,(18)-(20)zz

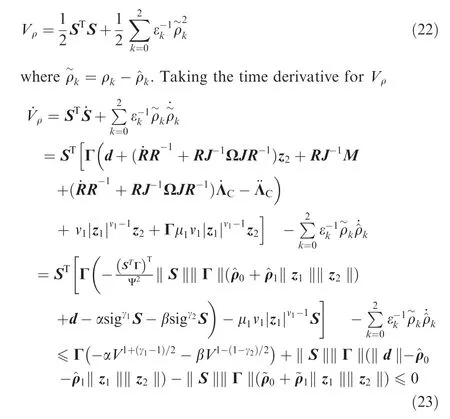

The corresponding time derivative is
According to the Lemma 1,the convergence time is bounded by.

.,-.,,,.
4.CA design
In this section,a novel CA method is designed through two steps.In the first step,based on effective gain in actuators and the distance from actuator current position to corresponding saturation limit,a novel accelerated Landweber iteration based CA method is developed.In the second step,a novel redistribution method is proposed to effectively solve the problem of saturation limits when input redundancy is available.
4.1.Accelerated Landweber iteration based CA
In this section,a novel CA in an explicit form is presented.This method considers not only the limitations on computational resources but also the distance from actuator current position to corresponding saturation limit.According to Definition 3,virtual control command allocated among actuators is an ill-posed problem,thus the following optimization problem is considered

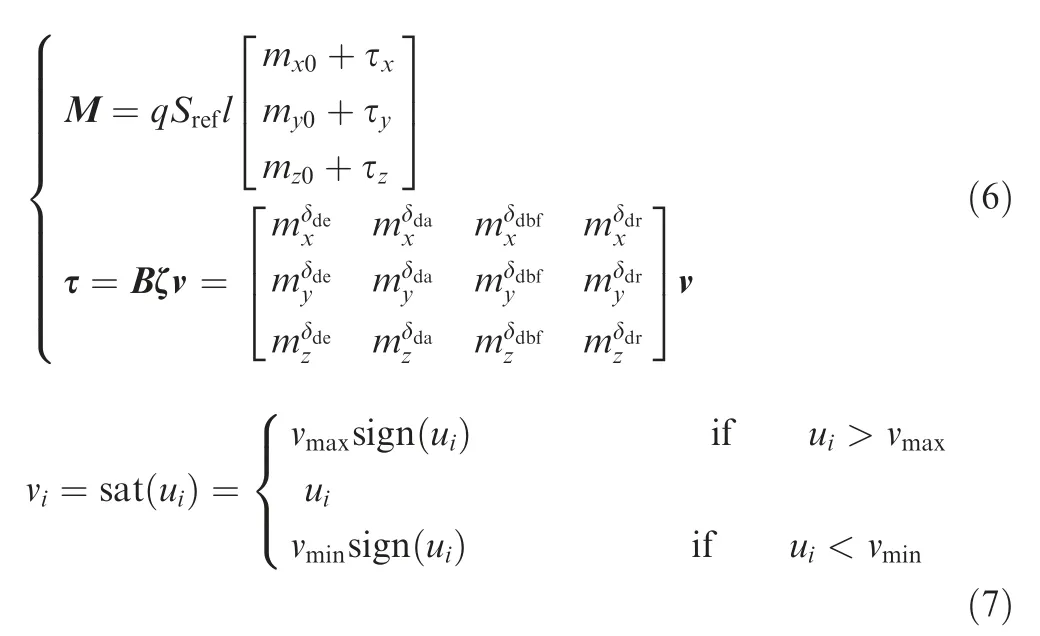
Assuming the saturation limits are not required,Eq.(6)can be written as Bζu=τ.To solve the Eq.(34),Bζu=τ is deformed as follows

where 0 <λ <1/‖ (B ζ)Bζ‖,E=diag(,,,)is a diagonal matrix whose diagonal entries is

Meanwhile,Eq.(35) based on the Landweber iteration is deformed as follows
Eq.(37) is a linear recursion formula.We can see that uhas the explicit form u=Rτ.To save computing resources and enhance iteration efficiency,an accelerated iteration scheme is proposed.
γ.
Proof.4’,(μ,u,τ),
Any choice of≥,there has ‖Bζu-τ‖≤γ,which validate the feasibility of the proposed scheme.
Remark 2...,,.,,-.
4.2.Redistribution mechanism
When the virtual control command is too large or a control surface fails,the phenomenon of actuator saturation may occur.In order to avoid the deviation between the actual control command and the virtual command which caused by the saturation of actuator,the following redistribution mechanism is used to redistribute the oversaturated command to other healthy actuators when input redundancy is available.That is to say,the saturated actuator is deemed as a failed actuator in the process of redistribution.
Considering actuator input saturation,we define


A new physical control command is defined as

If u∈Rsatisfies the saturation limits,then we apply l to the system,otherwise,we need to let u=uin Eq.(47)until usatisfies the saturation limits.

5.Simulation and analysis
5.1.Simulation setting
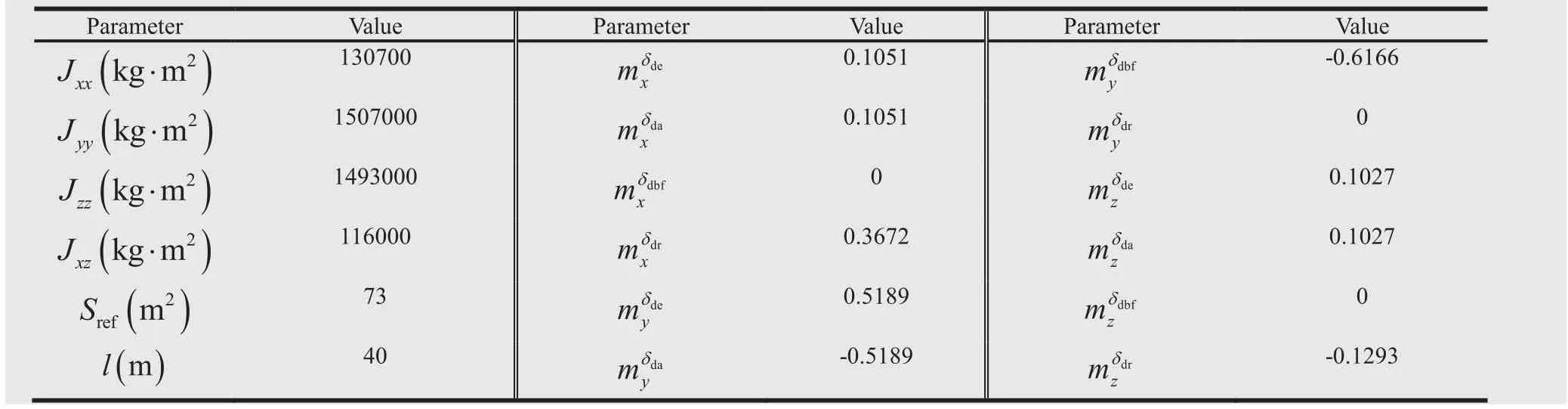
Table 1 Shows the tactical qualifications and the type of practice potentials in breaking barriers of pedestrianization (Researcher,2018).
5.2.Simulation analysis of proposed controller
To demonstrate the effectiveness of the designed controller,some simulations are performed with the proposed controller(18)and the fixed-time NFTSMC in Ref.and PID controller.Fig.2 is the tracking curves of α,β and σ,which shows the system error can converge to a small region within about 0.8 s in spite of disturbances.And the attitude tracking error of the PID and the control system in Ref.converge to a small region within about 7.5 s and 6.0 s respectively.Obviously,the proposed controller based on adaptive law achieves faster convergence speed and smaller attitude tracking error than the controller in Ref.From Fig.3,it can be seen that the sliding mode surface converges to a neighborhood of S=0 within about 0.8 s.Fig.4 shows the adaptive law has an excellent estimation performance.From Fig.5,it can be seen that the deflections of actuators are less than their respective limits and achieves the chattering-free performance.The changes of height and velocity are shown in Figs.6 and 7.
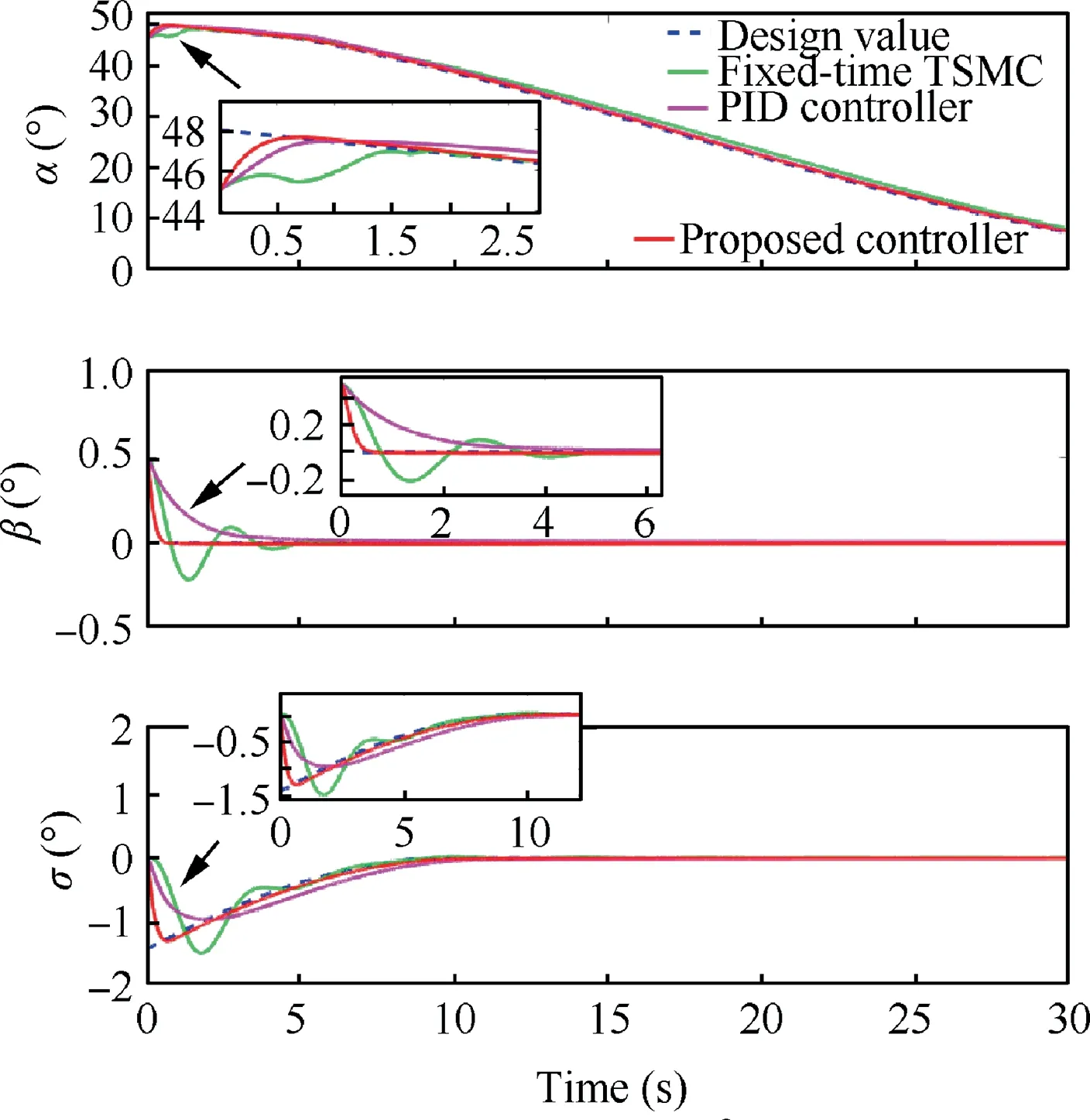
Fig.2 Curves of α,β and σ.
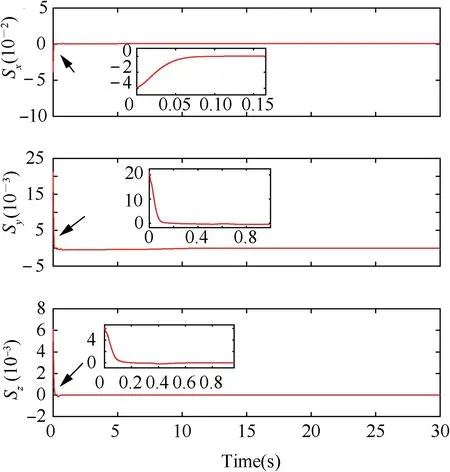
Fig.3 Curves of sliding mode surfaces.
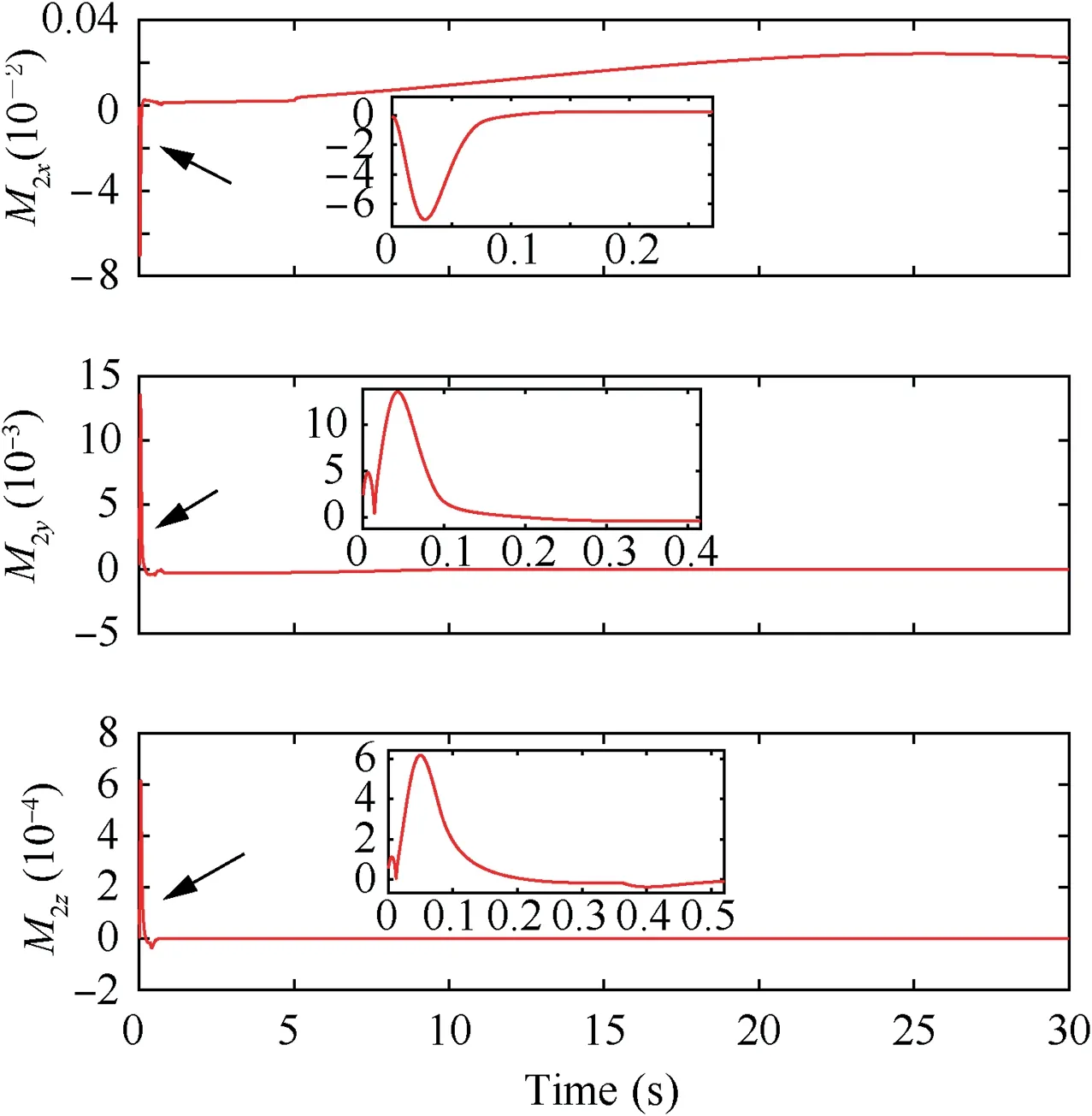
Fig.4 Curves of adaptive law.
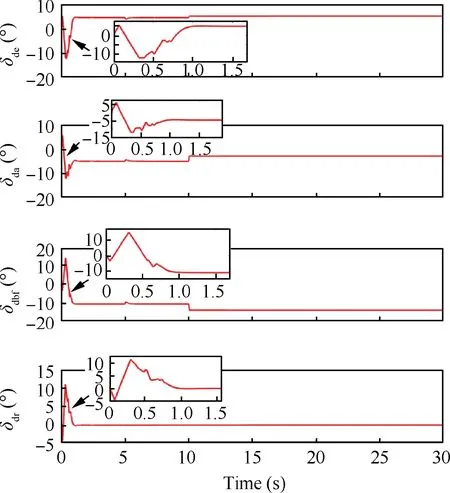
Fig.5 Curves of control command.
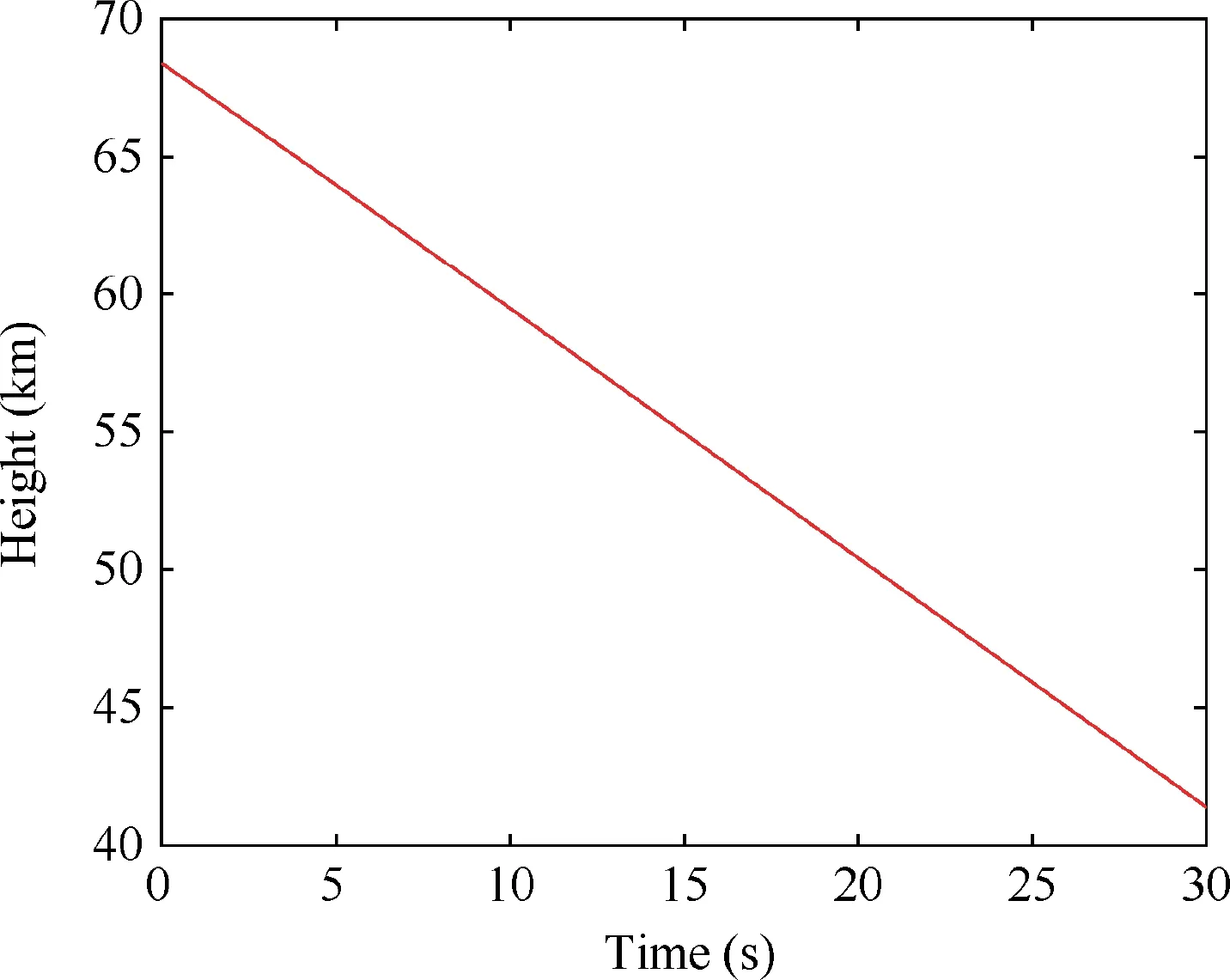
Fig.6 Curves of height.
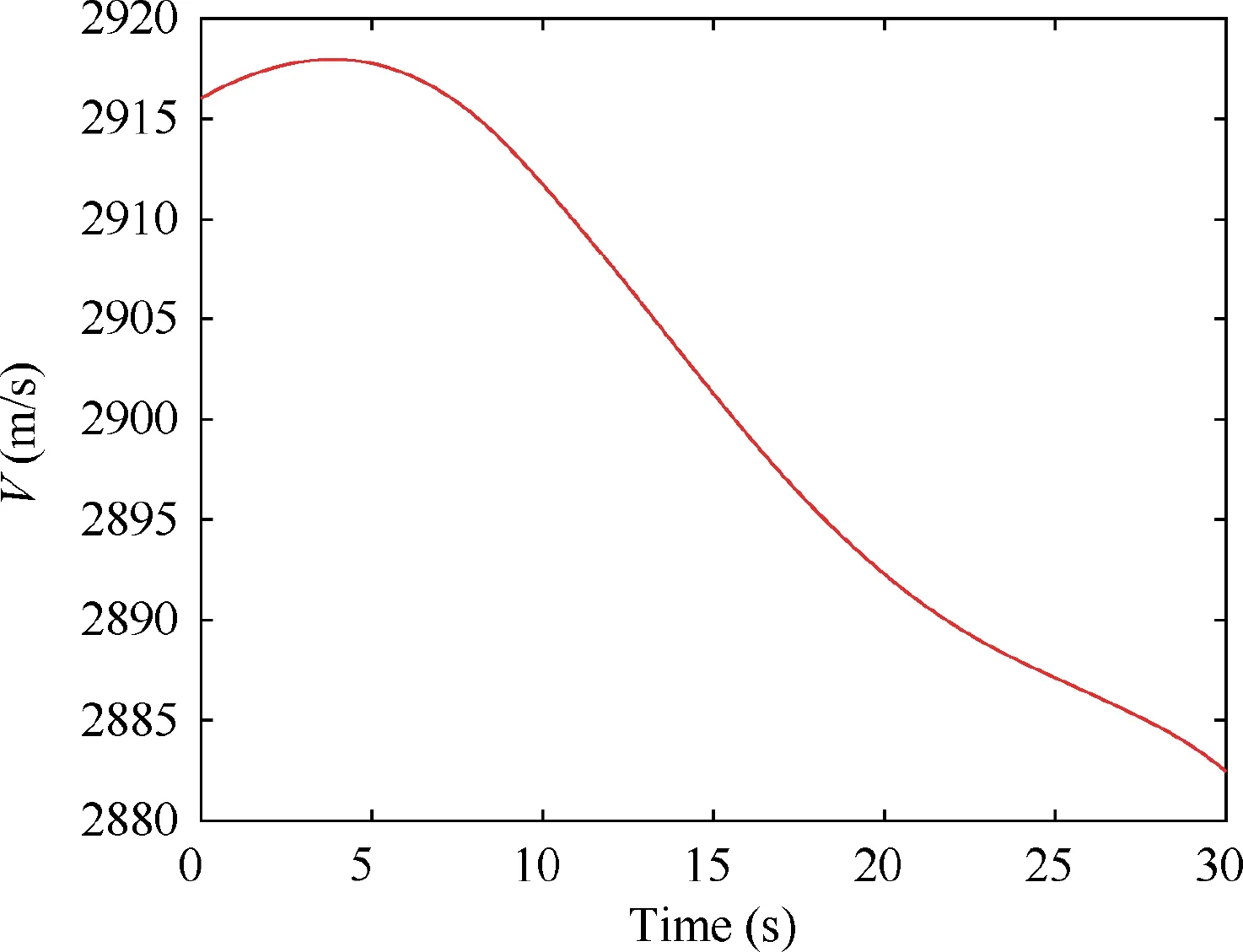
Fig.7 Curves of velocity.
5.3.Simulation analysis of proposed CA

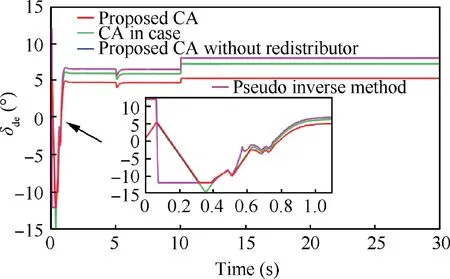
Fig.8 Curves of right aileron.
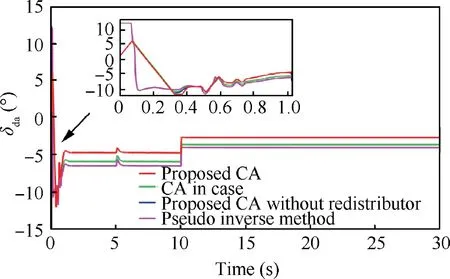
Fig.9 Curves of left aileron.
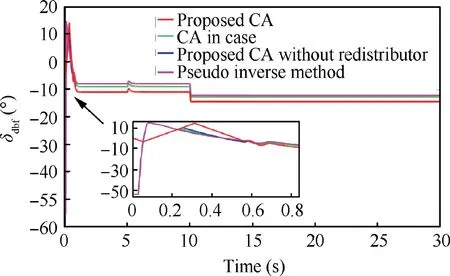
Fig.10 Curves of flap.
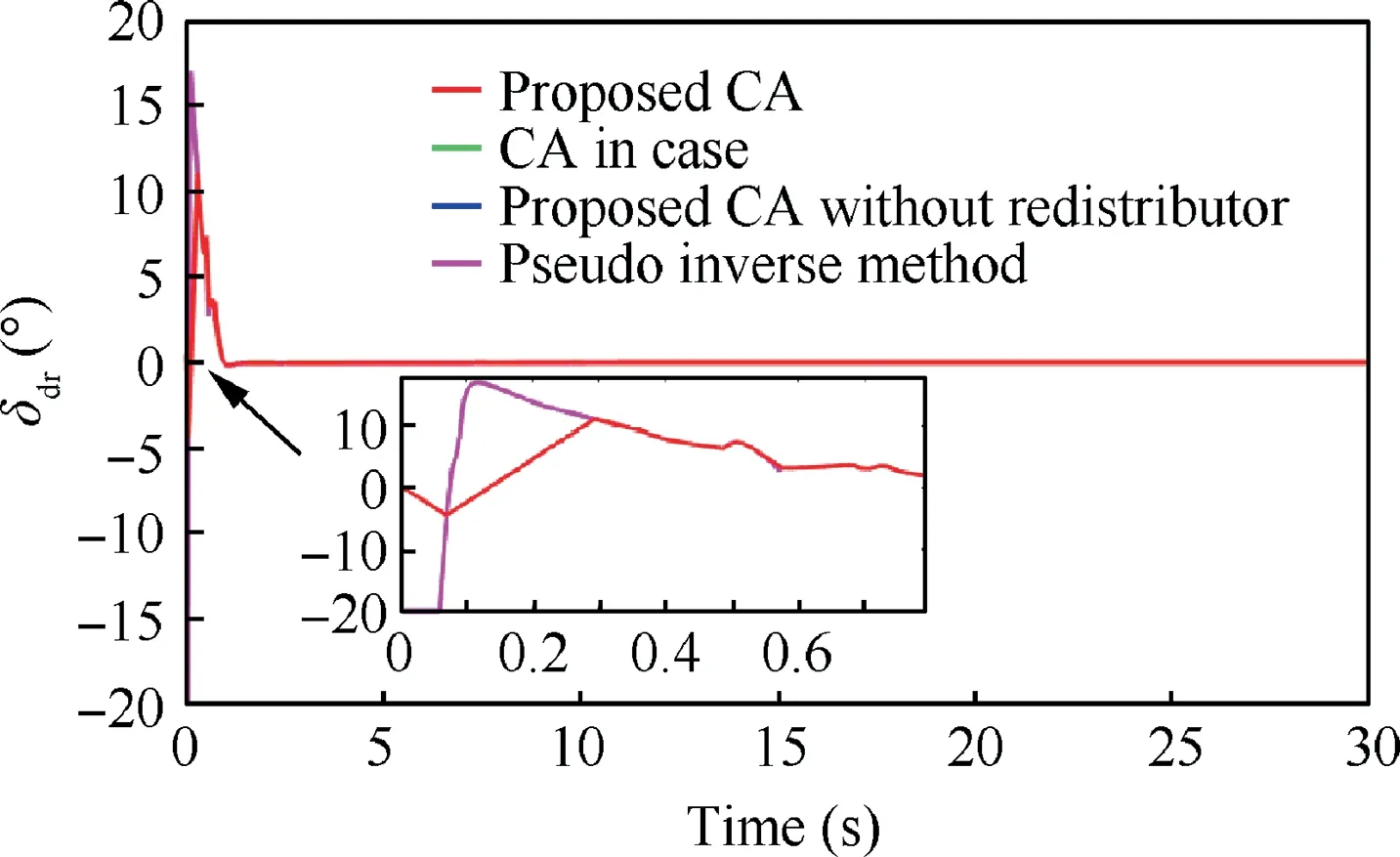
Fig.11 Curves of rudder deflection.
As shown in Figs.8-11,the CA proposed in this paper can distribute the virtual control command among the actuators proportionally according to effective gain and the distance form actuator current position to corresponding saturation limit.Under the simulation conditions in subsection 5.3,more virtual control commands are distributed to the right aileron and left aileron while less are distributed to the flap.It can be seen that the results of distribution are related to the effective gain and the distance form actuator current position to corresponding saturation limit.From the correlation curve of the proposed CA method with and without redistribution mechanism,the saturated control command caused by the right aileron is redistributed to the left aileron.And in order to counteract the additional pitching moment produced by the left aileron,the flap deflection is changed accordingly.
6.Conclusions
(1) This paper investigates the fault-tolerant control of RLV under multiple disturbances and actuator faults.By using the adaptive law containing error term explicitly stated,a fixed-time NFTSMC method is designed,which can estimate the external disturbances quickly without knowing the upper bound of disturbance in advance.
(2) Then,a novel CA method based on accelerated Landweber iteration is proposed.The virtual control command is distributed among the actuators proportionally according to the effective gain as well as the distance from actuator current status to corresponding saturation limit.
(3) Meanwhile,this paper proposes a novel redistribution mechanism when input redundancy is available.Using the saturation gain matrix and CA method based on accelerated Landweber iteration,the saturated signal is redistributed to the rest of the healthy actuators in order to realize the accurate tracking of virtual control command.
(4) Simulation results show that the proposed controller allows the tracking error states to converge to a neighborhood of zero,the proposed CA method can distribute virtual control command proportionally and solve the problem of saturation limits effectively in regardless of actuator faults and disturbances.
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
The authors would like to thank the financial supports by the open Fund of National Defense Key Discipline Laboratory of Micro-Spacecraft Technology,China (No.HIT.KLOF.MST.2018028),and the open Fund of National Defense Key Discipline Laboratory of Micro-Spacecraft Technology,China(No.HIT.KLOF.MST.201704).