智能网联汽车封闭道路测试执行方法概述
2022-03-07 10:51:44戚文强童宝锋李霖陈桂花张俊杰
汽车科技 2022年1期
戚文强 童宝锋 李霖 陈桂花 张俊杰


摘 要:智能网联汽车封闭道路测试作为推动智能网联汽车快速发展的重要一环,其执行方法将为智能网联汽车产品研发和验证提供重要参考和依据。文章基于汽车传统ADAS测试执行方法,首先从测试场景、测试环境、测试车辆控制和测试结果响应方面分析了智能网联汽车测试与ADAS测试的异同;其次,依托ADAS测试框架体系,结合智能网联汽车测试特性,研究测试方案、测试执行方案和测试结果分析评价方法,构建了一套完善的智能网联汽车封闭道路测试体系;最后,基于上海市智能网联汽车封闭道路测试实践,验证了该测试方法的可行性。
关键词:智能网联汽车;封闭道路测试;ADAS测试;测试体系;测试方法
中图分类号:U467.1+1 文献标志码:A 文章编号:1005-2550(2022)01-0015-06
Overview of the Execution Methods for the Closed Road Tests
Of ICVs
QI Wen-qiang 1,2, TONG Bao-feng1,2, LI Lin1,2, CHEN Gui-hua1,2, ZHANG Jun-jie1,2
( 1.Shanghai SH Intelligent Automotive Technology Co., Ltd, Shanghai 201804, China; 2.Shanghai International Automobile City (Group) Co., Ltd, Shanghai 201805, China )
Abstract: As an important part of the rapid development of intelligent connected vehicles, the closed road test of intelligent connected vehicles will provide an important reference and basis for the development and verification of intelligent connected vehicles. Based on the traditional ADAS test execution methods, the article first analyzes the similarities and differences between the intelligent connected vehicles test and the ADAS test in terms of test scenarios, test environment, test vehicle control, and test result response. Secondly, basing on the ADAS test framework system and combining with the test characteristics of intelligent connected vehicles,a perfect closed road test system of intelligent connected vehicles is constructed by researching the test scheme, test execution scheme and test result analysis and evaluation method. Finally, the feasibility of the test method was verified basingon the practice of Shanghai Intelligent Connected Vehicles closed road test.
Key Words: Intelligent Connected Vehicles; Closed Road Test; ADAS Test; Test System; Test Method
前 言
近年来,智能网联汽车飞速发展,已成为当前新时代背景下推动汽车行业发展的又一利刃[1]。智能网联汽车测试对其技术发展具有至关重要的作用,而封闭道路测试是智能网联汽车测试的重要环节,相比于仿真测试、公共道路测试等测试方法,具有可控性高、保真度高、可复制性高和可重复性高等优势[2]。
当前智能网联汽车封闭道路测试研究处于初步阶段,本文依托于国家智能网联汽车(上海)试点示范区,以上海市智能网联汽车封闭道路测试实践为基础,对智能网联汽车封闭道路测试进行了深入研究,并提出了一套安全、可靠、高效的封閉道路测试执行方法。
2 智能网联汽车封闭道路测试特性分析
智能网联汽车技术架构与ADAS系统具有很多相似性,主要构成均包括感知、决策和控制三个部分,因此智能网联汽车测试与ADAS测试具有相似性[3]。同时,智能网联汽车相比于车辆ADAS具有自主性更强、环境感知更为全面、决策模式更为复杂、控制方式更为灵活等不同特点,因此其测试方案相比于ADAS测试也存在一些差异[4]。ADAS测试注重特定功能对具体场景的响应,在测试环境、测试场景、测试车辆控制和测试结果响应等方面都有严格要求[5],而智能网联汽车测试更注重系统对行驶环境的合理响应[6],主要有以下几方面的差异:
(1)测试环境方面:ADAS测试对测试道路路况、气候条件等因素有着严格要求,而对于智能网联汽车测试,凡是能符合系统ODD的环境条件,都满足智能网联汽车测试对环境的要求;
(2)测试场景方面:对于具体的ADAS测试,在相应的测试规范及标准中对其测试场景都有着明确的定义,而智能网联汽车测试场景是根据其系统ODD而设定的,具有不同ODD的车型其测试场景也应当有所差异;
(3)测试车辆控制方面:ADAS测试对车辆的运动轨迹、速度以及加速度等都有非常严格的控制要求,而智能网联汽车在测试过程中其运动是由车辆系统自主控制,因此测试过程中车辆控制具有随机性;
(4)测试结果响应方面:对于ADAS测试结果响应,在相应测试标准及规范中都有明确要求,ADAS测试侧重于触发某些具体功能对测试场景进行响应,而智能网联汽车测试重点考察其对测试场景的合理响应,响应模式和控制策略具有多样性,并存在一定随机性[7-8]。
本文基于上述智能网联汽车测试特性分析,提出一种以ADAS测试为基础的智能网联汽车封闭道路测试体系。
3 智能网联汽车封闭道路测试体系构建
基于ADAS测试框架体系,结合当前智能网联汽车测试特性,本文构建了一套完善的智能网联汽车封闭道路测试体系,如图1所示。
首先,基于多源异构数据支撑,融合多维行为数据,构建全局场景数据库,依据具体智能网联汽车功能及其ODD,在场hhH景库中抽取相应的基础测试场景及定制化测试场景,并立足于当前技术现状,研究与之对应的智能网联汽车封闭道路测试方案;
其次,基于ADAS测试执行方法,结合智能网联汽车测试特性,分析测试场景搭建方法,并研究满足测试执行随机性、以重复测试为基础的智能网联汽车封闭道路测试执行方案[9];
最后,在测试结果分析评价方面,本文提出了一套以车辆功能实现和测试安全为考察指标的单次测试通过评价方法,以及以车辆重复测试综合表现为评价基础的测试结果分析评价体系。
3.1 测试方案研究
3.1.1 测试场景库概述
智能网联汽车测试相比于ADAS测试更加复杂,需要更为全面、多样的测试场景来支撑,建立全局测试场景库是智能网联汽车测试有效开展的基础[10]。国家智能网联汽车(上海)试点示范区启动了《昆仑计划:中国智能驾驶全息场景库建设》项目,通过事故场景数据、自然驾驶场景数据、驾驶模拟器场景数据、国内外标准规范场景、路侧交通流/V2X测试场景数据、自动重构场景等多种数据源采集[11],并基于多源异构数据支撑,融合多维行为数据,构建了一个满足测试工具链全链条需求的智能网联汽车全局测试场景数据库。上海市制造业创新中心(智能网联汽车)以昆仑计划研究成果为基础,进一步研究形成了《上海市智能网联汽车封闭道路测试与评价规程》,支撑智能网联汽车封闭道路测试。
3.1.2 结合车辆ODD测试方案制定
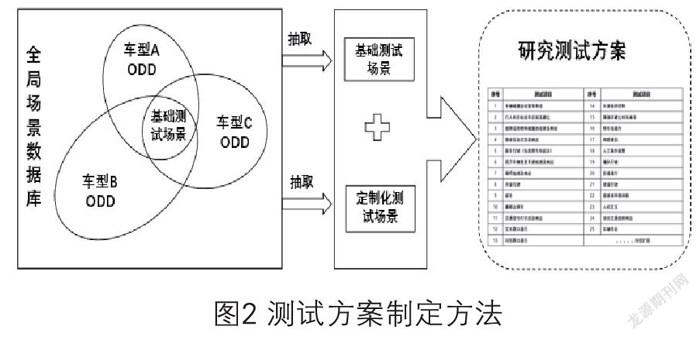
智能网联汽车有多种应用场景和技术方案,例如低速环卫车、港口作业车、公交短驳车等,每种类型智能网联汽车应满足其特定应用场景功能需求,同时,对于不同应用场景的智能网联汽车都应具备车辆行驶基本功能需求,例如保持车道内行驶、障碍避让等[12]。因此,针对智能网联汽车测试应包括基础测试场景和定制化测试场景,如图2所示,本文通过如下方法构建智能网联汽车测试方案:
首先,立足测试车辆技术方案,并结合车辆ODD,从基础测试场景库中抽取基础测试场景;其次,基于测试车辆具体应用场景,从定制化场景库中抽取对应的定制化测试场景;最后,结合基础测试场景和定制化测试场景,并立足当前测试技术,制定测试方案。
3.2 测试执行方案研究
3.2.1 测试场景搭建方法概述
本文参考ADAS测试执行方法,构建智能网联汽车测试执行方案,但智能网联汽车测试与ADAS测试具有差异性。ADAS测试是系统针对某具体场景反应的考察,而智能网联汽车测试注重针对某项功能的考察[13],因此智能网联汽车测试执行具有以下两大特点。
其一,ADAS测试对场景参数严格要求,必须严格精确控制测试车辆和目标物的运动轨迹和速度等,而智能网联汽车要求系统对场景具有更强的适应性,对于目标物的不同运动状态都应当能够正确响应。以E-NCAP CBLA场景本车车速为50km/h工况为例进行分析,如图3所示:
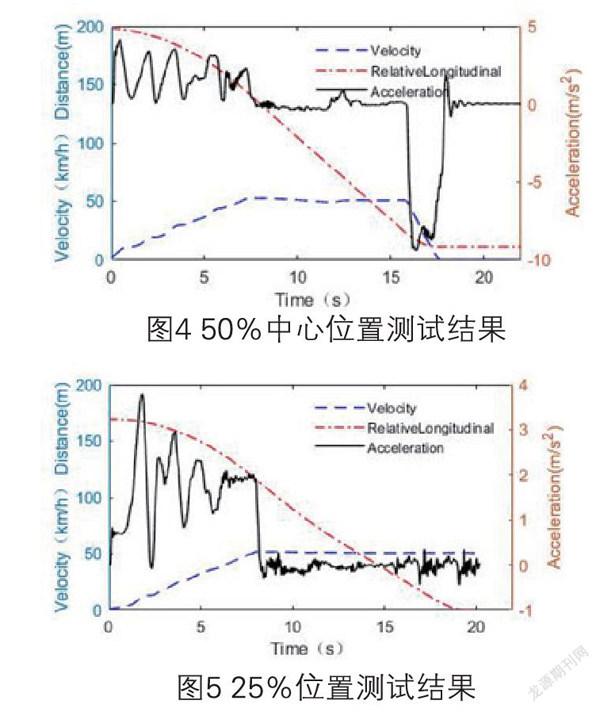
(1)ADAS测试情况: ADAS测试严格要求自行车位于车头中心±0.15m范围内运动,若不符合该要求,判定测试结果无效。如图4和图5所示,在自行车处于50%中心位置测试时,车辆AEB功能起作用,并以-8.5m/s2最大减速度在距离自行车10.98m刹停车辆,而在25%位置,测试结果无效且车辆AEB未起作用,与自行车发生碰撞。
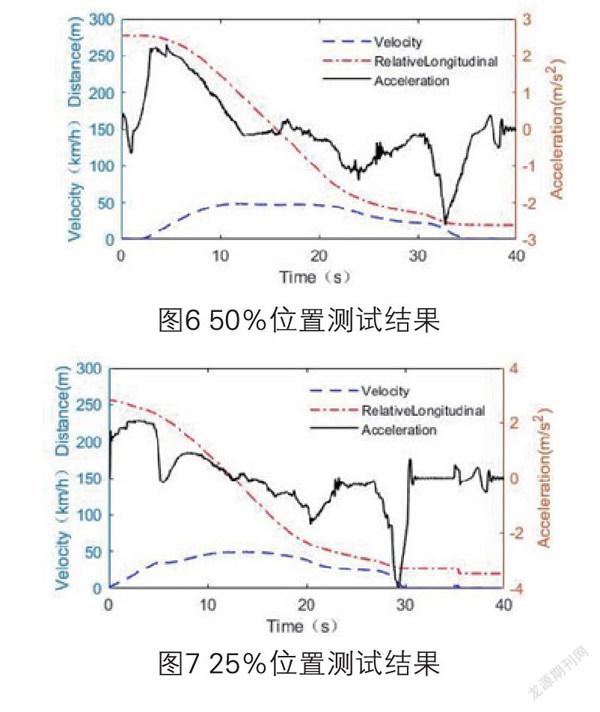
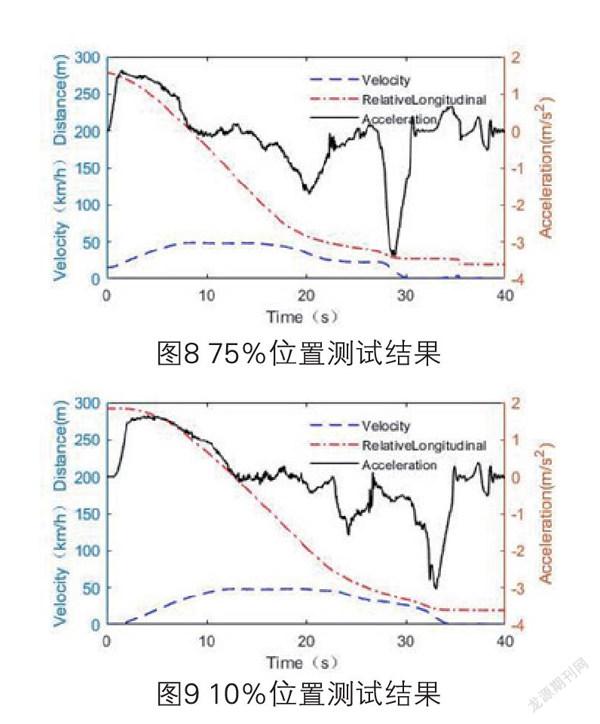
(2)智能网联汽车测试情况:参照E-NCAP CBLA测试场景搭建智能网联汽车测试场景,要求自行车在测试车道内前方任意位置运行,智能网联汽车都能触发功能避免碰撞事故发生,如图6、图7、图8和图9所示,智能网联汽车在距离前方自行车100m左右距离开始缓慢减速,并以最大为-3m/s2至-4m/s2減速度在距离自行车20m左右距离刹停车辆。
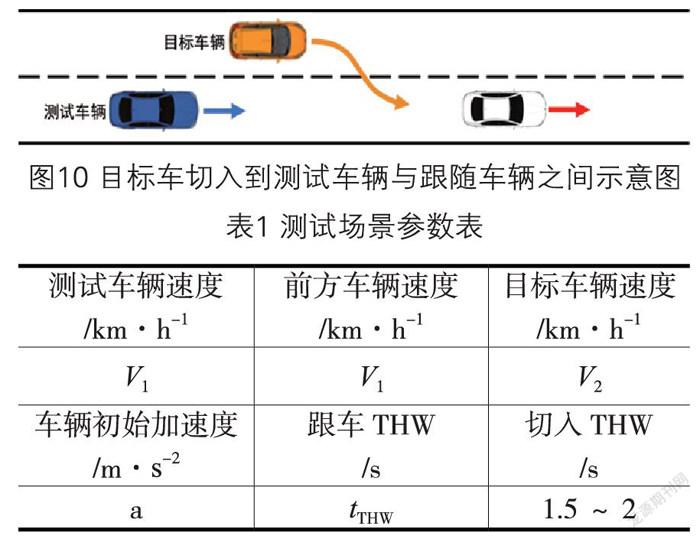
其二,ADAS测试车辆需要通过驾驶机器人来控制测试车辆运行,而智能网联汽车运行完全由自车系统控制,运动轨迹具有随机性,因此,对于某些测试场景应提前布置好某些量值,以达到场景要求的效果。以测试车辆在直线车道以一定距离跟随前车稳定行驶,测试车辆前方相邻车道目标车辆以一定速度切入到测试车辆和跟随车辆之间的测试场景为例,如图10所示,测试场景中相关参数如下表1所示:
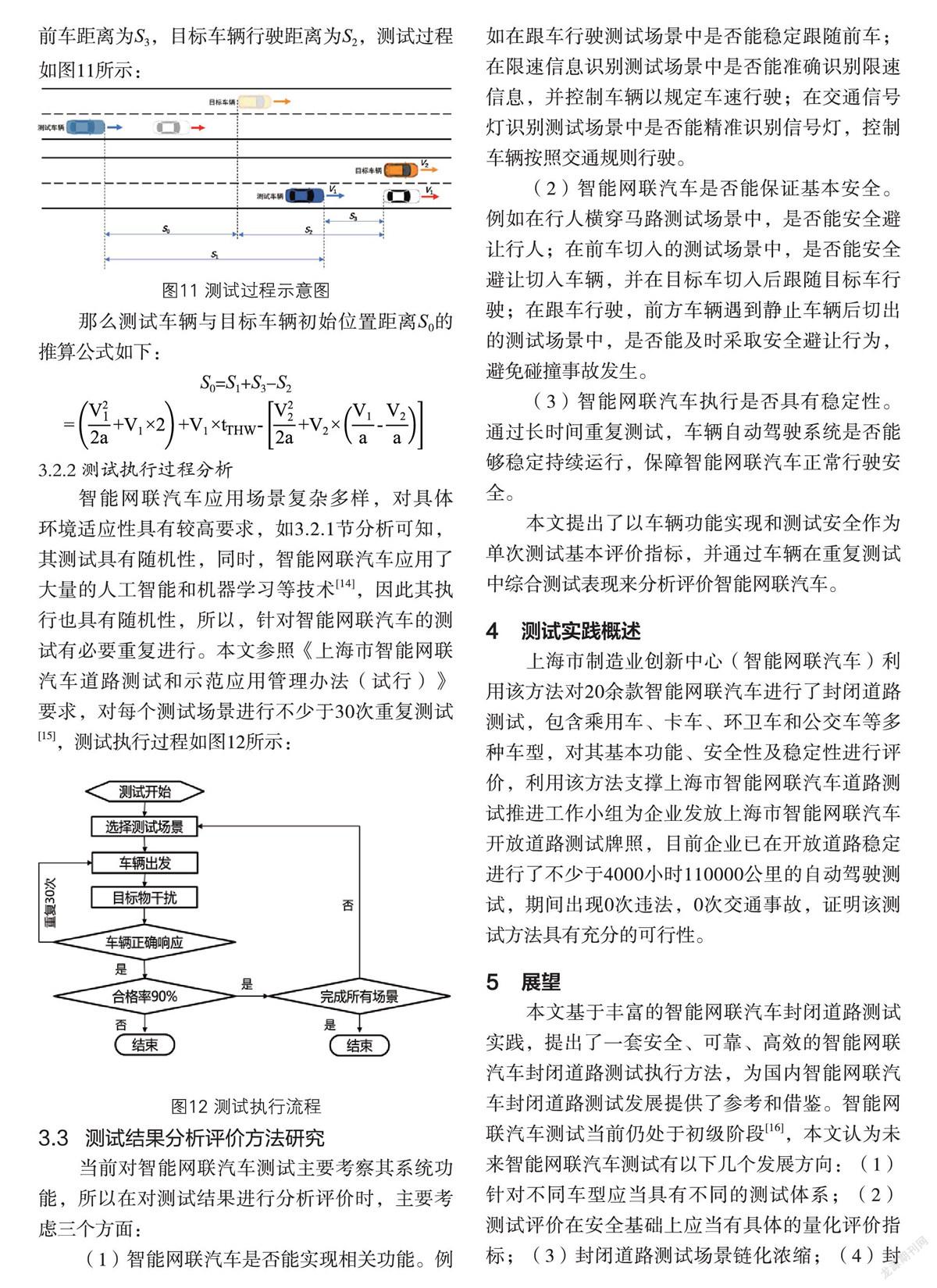
测试过程中要求测试车辆在稳定跟随前车行驶2s后,目标车辆伺机切入到测试车辆与前方车辆之间。假设测试车辆与目标车辆初始距离为S0,3辆车初始加速度均以a表示,测试车辆和前方车辆稳定车速为V1,目标车辆稳定车速为V2,测试车辆在稳定跟车2s时,目标车辆与前车正好处于平齐位置,此时,测试车辆行驶距离为S1,稳定跟随前车距离为S3,目标车辆行驶距离为S2,测试过程如图11所示:
那么测试车辆与目标车辆初始位置距离S0的推算公式如下:
S0=S1+S3-S2
3.2.2 测试执行过程分析
智能网联汽车应用场景复杂多样,对具体环境适应性具有较高要求,如3.2.1节分析可知,其测试具有随机性,同时,智能网联汽车应用了大量的人工智能和机器学习等技术[14],因此其执行也具有随机性,所以,针对智能网联汽车的测试有必要重复进行。本文参照《上海市智能网联汽车道路测试和示范应用管理办法(试行)》要求,对每个测试场景进行不少于30次重复测试[15],测试执行过程如图12所示:
3.3 测试结果分析评价方法研究
当前对智能网联汽车测试主要考察其系统功能,所以在对测试结果进行分析评价时,主要考虑三个方面:
(1)智能网联汽车是否能实现相关功能。例如在跟车行驶测试场景中是否能稳定跟随前车;在限速信息识别测试场景中是否能准确识别限速信息,并控制车辆以规定车速行驶;在交通信号灯识别测试场景中是否能精准识别信号灯,控制车辆按照交通规则行驶。
(2)智能网联汽车是否能保证基本安全。例如在行人横穿马路测试场景中,是否能安全避让行人;在前车切入的测试場景中,是否能安全避让切入车辆,并在目标车切入后跟随目标车行驶;在跟车行驶,前方车辆遇到静止车辆后切出的测试场景中,是否能及时采取安全避让行为,避免碰撞事故发生。
(3)智能网联汽车执行是否具有稳定性。通过长时间重复测试,车辆自动驾驶系统是否能够稳定持续运行,保障智能网联汽车正常行驶安全。
本文提出了以车辆功能实现和测试安全作为单次测试基本评价指标,并通过车辆在重复测试中综合测试表现来分析评价智能网联汽车。
4 测试实践概述
上海市制造业创新中心(智能网联汽车)利用该方法对20余款智能网联汽车进行了封闭道路测试,包含乘用车、卡车、环卫车和公交车等多种车型,对其基本功能、安全性及稳定性进行评价,利用该方法支撑上海市智能网联汽车道路测试推进工作小组为企业发放上海市智能网联汽车开放道路测试牌照,目前企业已在开放道路稳定进行了不少于4000小时110000公里的自动驾驶测试,期间出现0次违法,0次交通事故,证明该测试方法具有充分的可行性。
5 展望
本文基于丰富的智能网联汽车封闭道路测试实践,提出了一套安全、可靠、高效的智能网联汽车封闭道路测试执行方法,为国内智能网联汽车封闭道路测试发展提供了参考和借鉴。智能网联汽车测试当前仍处于初级阶段[16],本文认为未来智能网联汽车测试有以下几个发展方向:(1)针对不同车型应当具有不同的测试体系;(2)测试评价在安全基础上应当有具体的量化评价指标;(3)封闭道路测试场景链化浓缩;(4)封闭道路测试与仿真测试结合,提升测试效率;(5)封闭道路测试要考虑功能安全、预期功能安全等方面的内容。
参考文献:
[1]Xu Kuang,Fuquan Zhao,Han Hao,et al. Intelligent connected vehicles: the industrial practices and impacts on automotive value-chains in China. 2018,24(1):1-21.
[2]田思波,樊晓旭,童宝锋,等. 上海市智能网联汽车封闭道路测试与评价方法[J].上海汽车,2019(8):22-26.
[3]李克强,戴一凡,李升波,等.智能网联汽车( ICV ) 技术的发展现状及趋势[J].汽车安全与节能学报,2017,8(1): 1-14.
[4]黄钰峰,高艺鹏.我国智能网联汽车技术及测试现状分析[J].汽车实用技术. 2019(15):26-28.
[5]吉星,李维晋.智能网联汽车技术应用与发展趋势[J].时代汽车.2019(07):164-165.
[6]和福建,张晋崇,石娟.智能网联汽车测试技术研究[J].汽车电器.2019(03):19-24.
[7]靳聪,郭强,侯学轶,等.智能网联车辆技术及相关测试方法分析[J].汽车文摘. 2019,(10):51-57.
[8]陈国庆.智能网联汽车的技术架构及测试方法研究[J].建筑工程技术与设计. 2018(33):166.
[9]陈韬,蔡博,回春.基于场景元素的智能网联汽车场景构建研究[J].2019(06):9-12.
[10]蔡勇,李秀文.智能网联汽车测试评价体系研究[J].中国汽车.2018(10):27-33.
[11]刘生.智能网联汽车驾驶场景数据采集的研究及应用[J]. 汽车纵横.2018(08):74-75.
[12]郑磊,刘涛,王宇,等.智能车场景建设及仿真[J]. 汽车技术, 2018(10):16-19.
[13]Xu Chao. Research on the Overall Function Framework Scheme of the Intelligent Connected Vehicle. 2017,5(2).
[14]李晓龙,刘菁,张泽忠,等.我国智能网联汽车关键技术与突破[J].2019(02):76-81.
[15]樊晓旭,李霖,林雅,等.智能网联汽车政策与公开道路测试实践[J]. 中国汽车. 2019(02):24-28.
[16]DianGe Yang,Kun Jiang,Ding Zhao,et al. Intelligent and connected vehicles: Current status and future perspectives. 2018,61(10):1446-1471.
专家推荐语
孙立清
北京理工大学中关村校区机械与车辆学院
副教授
该论文体现了ICV研发管理等工作重点,论文题目内容能体现核心思想,论点明确,有新意,论证严谨,逻辑严密,文字简洁通顺,论据可靠,数据客观,设计合理,推导无误,结论正确,有经验性,内容实用、有一定的学术水平和独特的学术见解,应用于科研与生产能取得一定的经济效益。
猜你喜欢
数学物理学报(2022年5期)2022-10-09 08:58:18
现代经济信息(2020年34期)2020-06-08 06:03:04
电子制作(2019年16期)2019-09-27 09:34:56
电子制作(2019年15期)2019-08-27 01:12:02
商情(2018年25期)2018-07-08 14:16:14
当代经济管理(2018年5期)2018-05-25 07:40:56
中国科技博览(2018年10期)2018-03-28 10:57:42
科技视界(2017年29期)2018-01-18 06:10:26
汽车科技(2017年3期)2017-06-12 12:41:56
铁道通信信号(2016年6期)2016-06-01 12:10:20