
基于roboRIO 控制器的排球陪练机器人设计
2022-03-06 05:33左文艳张星亮顾泽宇
农业装备技术 2022年1期
左文艳,张星亮,顾泽宇
(江苏联合职业技术学院镇江分院,江苏 镇江 212016)
0 引 言
随着机器人技术的发展,机器人的用途越来越广,开始从传统的工业领域向农业、军事、医疗、服务、建设、生活等各个领域渗透[1]。特别是近年来,随着技术的突破以及核心零部件成本的下降,扫地机器人、医疗机器人、物流机器人等服务型机器人在各个领域不断加速渗透。作为更接近消费端的服务机器人,在人口老龄化加剧以及劳动力成本上升等因素推动下,未来市场发展空间非常广阔。
排球运动作为当今世界三大球运动之一,一直深受我国广大群众的喜爱,特别是中国女排多次在世界杯和奥运赛场上为国争光,使排球运动家喻户晓,中国女排精神更是成为中国精神的重要组成部分。目前,排球已成为了我国的体育中考项目,越来越多的青少年加入到排球训练和比赛项目中来。
但是排球运动员训练时,一般采用人工陪练方式,在竞技比赛训练期间,常把主要比赛对象队伍中的主力和球手作为研究重点,分析其技术特点,陪练员模仿其技术动作,作针对性防守训练,而对一些主力和球手扣球的高度、速度、角度等技术动作,陪练员就无法胜任这种工作。在这种情况下,迫切需要一台能真实模拟世界强队和扣球动作的机器人,使运动员身临其境地接受训练[2]。经过国内外现状分析,目前排球训练机器人市场上还没有成熟的产品。因此本文设计的具有自动捡球以及自动发球为一体的排球陪练机器人,具有较强的研究意义和较好的应用前景。
1 排球陪练机器人总体设计及工作原理
1.1 排球陪练机器人总体结构
笔者研制的排球陪练机器人总体结构如图1 所示,其机械结构主要包括捡球机构、储存机构、传球机构、投球机构、行走机构五部分,其中置于机身各部分的电机和气缸为机器人提供动力。
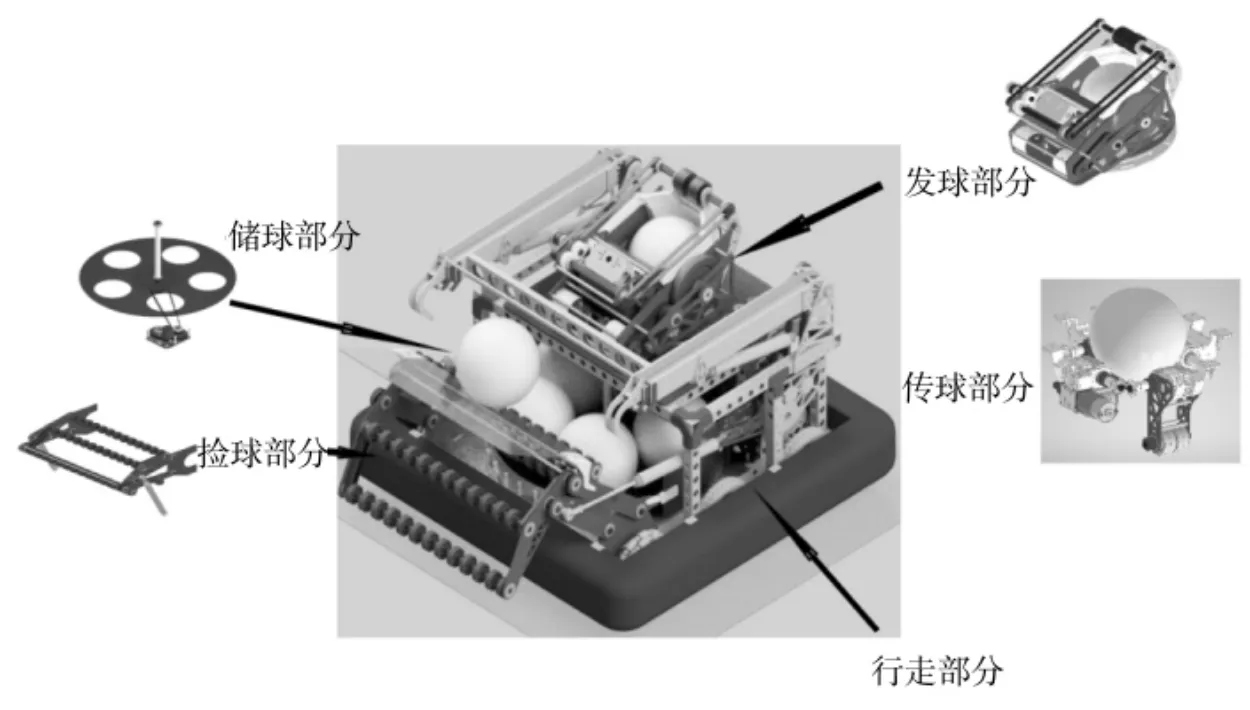
图1 排球陪练机器人总体结构
1.2 排球陪练机器人的工作原理
(1)捡球原理
当机器人行走到排球跟前,机器人进行捡球操作。机器人的捡球原理是运用曲柄摇块机构将两侧气缸(捡球气缸)伸缩进行收集装置的收放,同时利用捡球电机进行带传动,带动四根带有摩擦轮的轴同时做逆时针转动,将球收纳到储存机构中。收集完排球之后,可以将收集装置收起来,这样便可将收集装置当作一个挡板,防止球体掉落。捡球机构示意图如图2 所示。
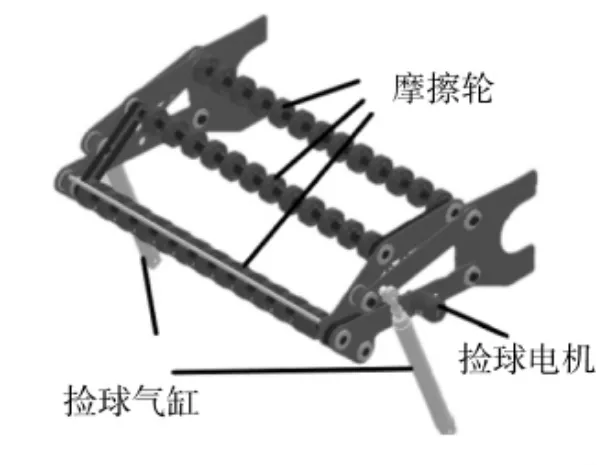
图2 机器人捡球机构示意图
(2)储球原理
球进入储存部位后,运用储球电机通过多级带传动带动底部的槽位转盘,使转盘匀速运转,不仅如此,储存机构也可同时存放多个排球,把从地上捡到的球均匀的存储在5 个槽位中,储球机构示意图如图3 所示。
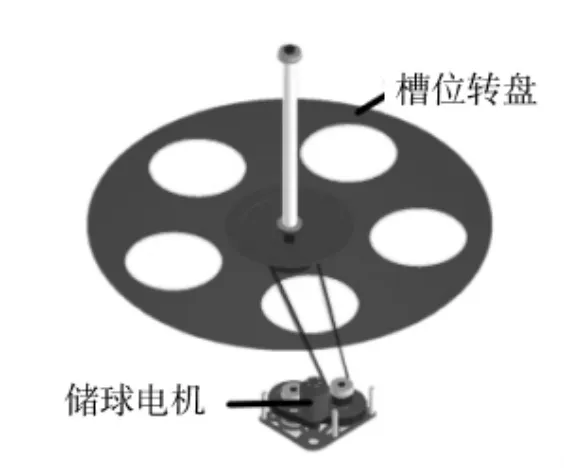
图3 机器人储球机构示意图
(3)传球原理
传球原理是利用一个电机(传球电机)进行带传动与齿轮传动,从而带动6 个摩擦轮把球从储球机构传送到发球机构,同时为了便于把球从储球部位更好的带到发球口,设计了一个气动小装置,运用气缸(传球收紧气缸)推动,使得1 号摩擦轮挤压球的下部,从而把球从储存机构更好地传送到发球口,可以有效提高传球效率。传球机构示意图如图4 所示。
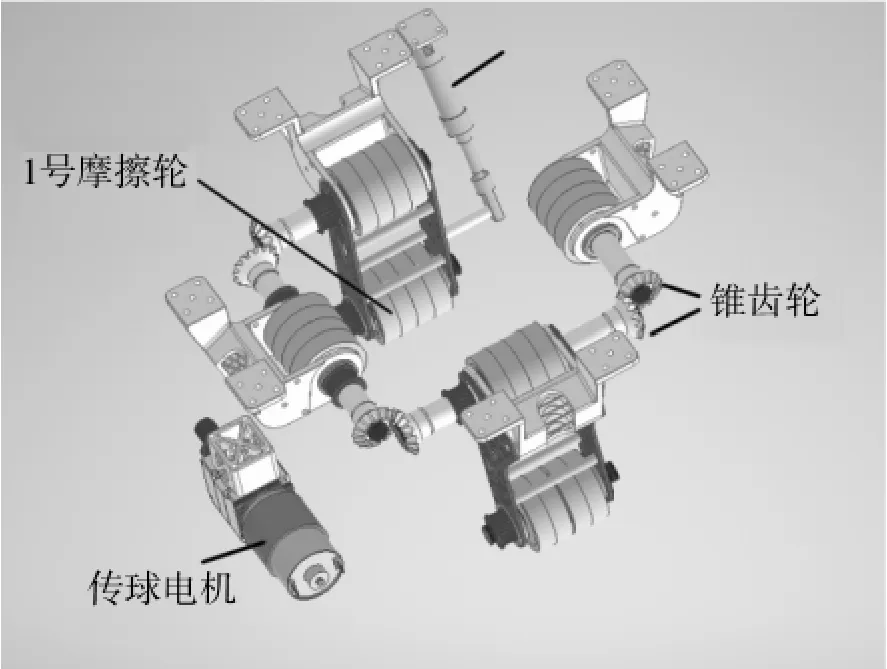
图4 传球机构示意图
(4)发球原理
发球原理是运用炮台旋转电机通过带传动与齿轮啮合,进而带动自制的大齿轮实现炮台的360°旋转,从而使得机器人可以实现360°任意方向发球。同时运用发球角度调整电机通过带传动、齿轮啮合及齿轮与齿条啮合,从而带动齿条的伸缩实现发球角度调整。最后发球是运用双电机(发球电机)通过带传动、齿轮啮合带动主摩擦轮与副摩擦轮朝相反方向运动,从而实现发球功能。此外通过编码器控制发球电机的速度,从而达到控制发球的速度。增加了一个惯性轮,通过编码器对机器右侧惯性轮的控制,从而减少每次投球时对摩擦轮的损耗,有效提升发球的稳定性。发球部分还增加了LIMELIGHT视觉传感器,利用LIMELIGHT 视觉传感器不仅可以实现自动捡球,还可以自动调整炮台旋转方向、发球角度、控制发球速度,从而增加排球运动员的训练强度,提高陪练效果。发球机构示意图如图5 所示。
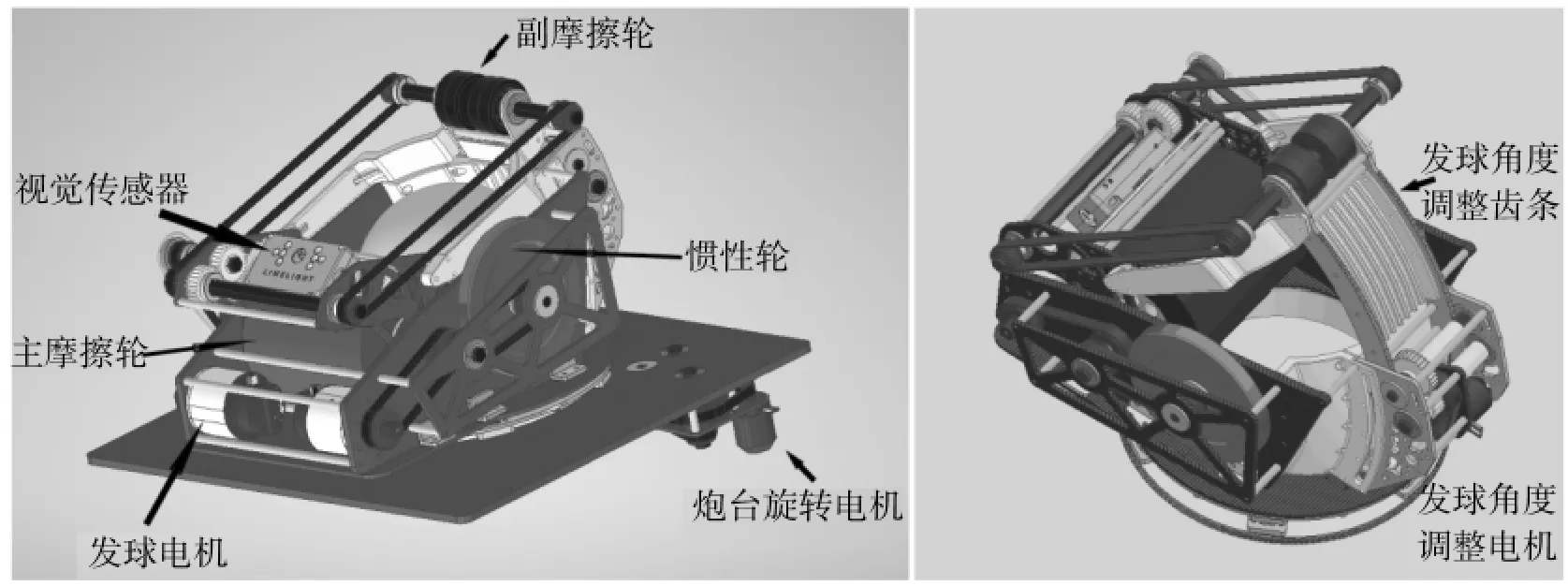
图5 发球机构示意图
(5)行走原理
排球陪练机器人行走结构如图6 所示。行走轮子包含2 个omni 全向轮与4 个15.24 cm 摩擦轮。行走电机采用4 个Falcon 500 无刷电机,输出动力至2个摩擦轮上,并通过带传动将动力传递给另外两组轮子。选用摩擦轮可在潮湿或干燥的环境中工作都不会发生打滑等现象,保证了机器人在运行过程中的可靠性。选用omni 全向轮实现了机器的原地定点旋转,提高机器的灵活性。选用Falcon 500 无刷电机提供动力,是因为其具有体积小、质量轻、动力大、效率高的特点。行走结构示意图如图6 所示。
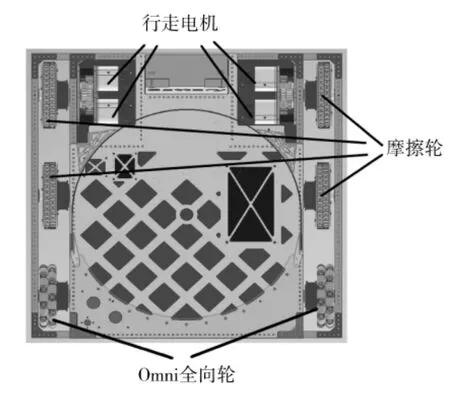
图6 机器人行走结构示意图
2 排球陪练机器人控制系统设计
排球陪练机器人控制系统主要包含主控制器、配电板、气动控制模块、电压控制模块、电机控制器、视觉传感器、电源、开关等部分。
主控制器选用的是NI 公司的roboRIO。roboRIO控制器是一款可重新配置的机器人控制器,包含用于I2C、串行外设接口(SPI)、RS232、USB、以太网、PWM 和继电器的内置端口,同时还具有LED、按钮、板载加速度计和自定义电子端口。大小适中,方便快捷,很好的把各种电路模块衔接起来。
机器人采用12 V 电源,电源通过断路器与配电板相连接,配电板给其他所有的设备进行供电。主控制器通过电机控制器和气动控制模块分别控制电机部分和气动装置。电机控制部分,每个电机控制器对应控制一个电机,本系统共有行走左轮电机、行走右轮电机、飞轮捡球电机、储存电机、传球电机、炮台旋转左侧电机、炮台旋转右侧电机、调整发球角度电机、发球电机等9 个电机。气动控制模块包括电磁阀和气缸,每个电磁阀控制对应的气缸伸缩。本系统共有拾取捡球气缸、传球收紧气缸2 个气缸。本系统包含一个视觉识别传感器,分别对地面上的球和运动员位置进行识别。排球机器人硬件控制系统框图如图7 所示。
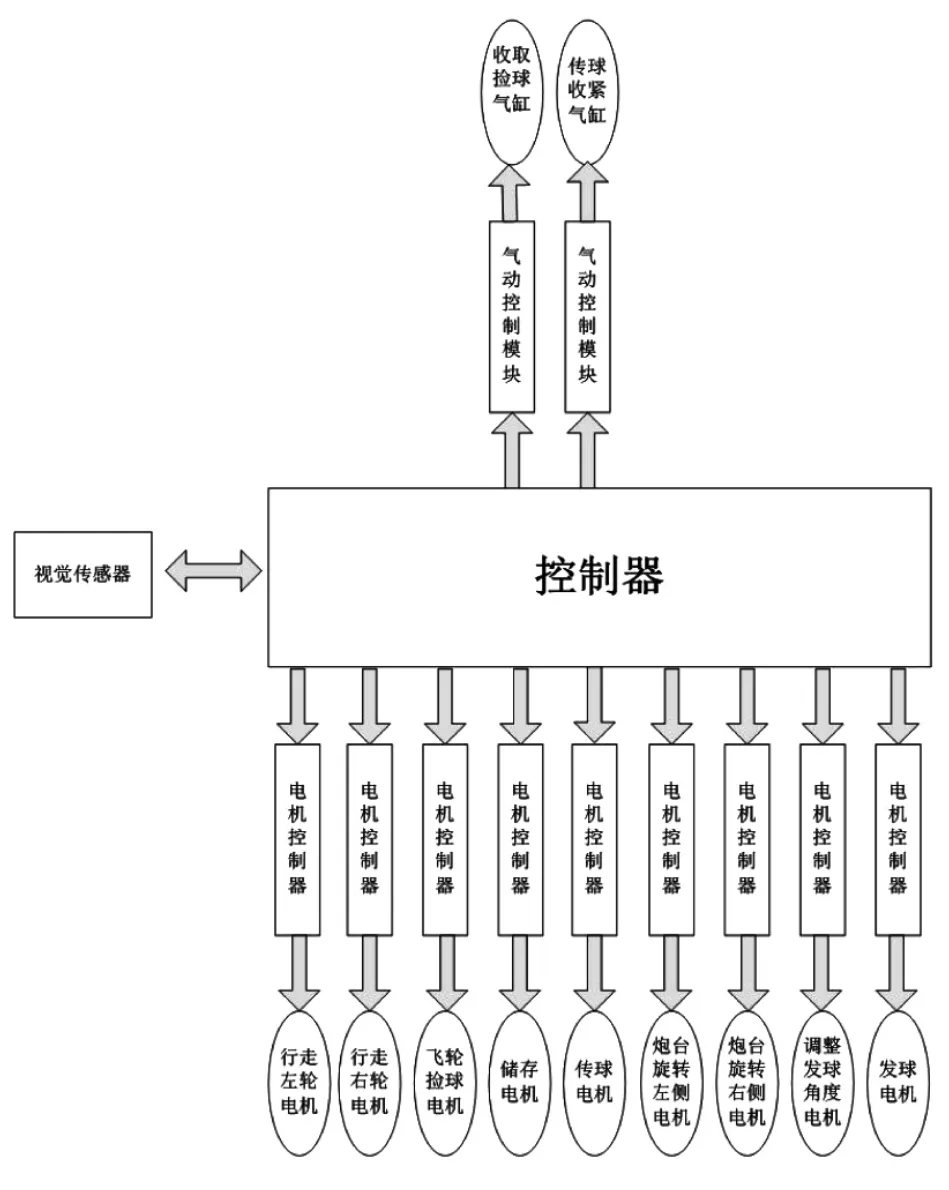
图7 排球机器人硬件控制系统框图
3 排球陪练机器人软件程序设计
系统软件开发是在IDEA 编程环境下使用JAVA 语言完成的[3]。排球陪练机器人软件程序设计流程如图8 所示。程序的主要执行步骤如下:
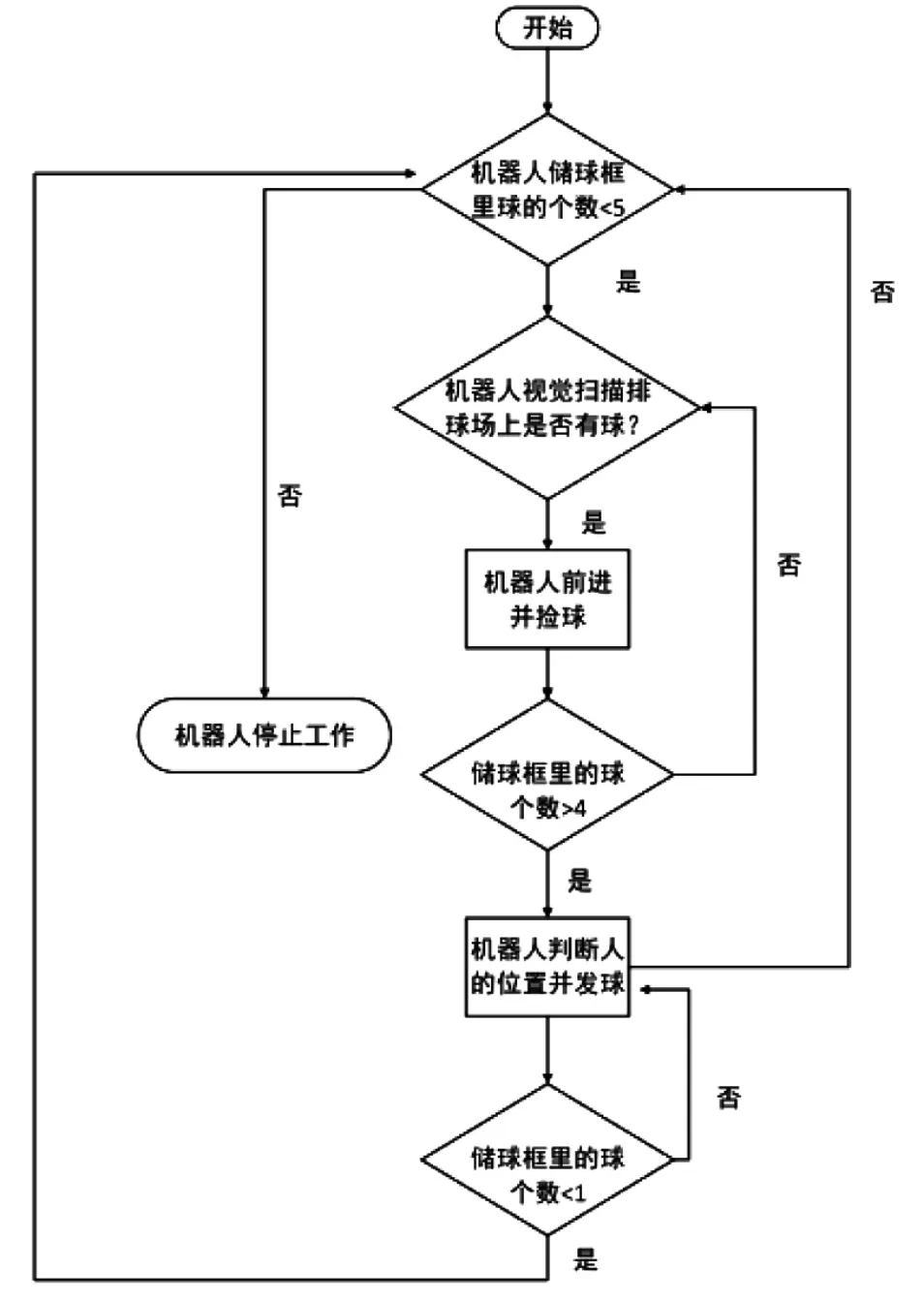
图8 软件程序设计流程图
(1)排球陪练机器人首先通过红外传感器对储球筐内球的数量进行判断,如果框内球的数量<5,执行第2 步机器人捡球相关动作,否则执行第3 步机器人发球相关动作。
(2)机器人通过视觉传感器对场地上的排球进行视觉扫描,当视觉传感器扫描到排球时,机器人的行走系统自动前进到排球所在处,捡球系统进行自动捡球,并储存到机器人的储球机构中。否则说明场地上已没有球,机器人停止工作。
(3)机器人捡完球后对储球筐中球的数量进行判断,如果球框中球的数量>4,机器人通过视觉传感器判断运动员的位置,并完成自动发球的相关动作。否则返回到第2 步继续执行捡球相关动作。
(4)机器人自动发球后,判断储球筐里球的数量,如果球筐里球的数量<1,机器人返回第2 步继续执行捡球相关动作,否则机器人继续执行自动发球相关动作。
4 样机制作与捡球试验
在结构设计的基础上,对排球陪练机器人各机构进行加工装配,完成样机制作[4]。捡球机器人样机实物如图9 所示。
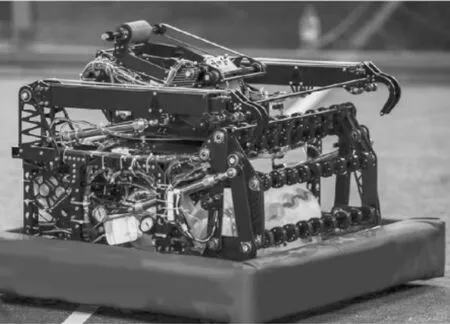
图9 排球陪练机器人样机
经过试验测试,排球陪练机器人可以实现机器人全方位的流畅运动,具备不间断传球与自动捡球的功能,可以运用编程时给的摩擦轮的速度以及LIMELIGHT 视觉传感器来决定投球的快慢、方向和角度,发球速度可达0~43.41m/s,发球方向可实现360°旋转,发球角度可以自动调节。整体上来看,设计的机器人可以满足排球运动员日常训练需要,操作灵活方便,陪练效率较高,具有较好的应用前景[5]。
猜你喜欢
汽车维护与修理(2022年3期)2022-08-02
当代贵州(2019年41期)2019-12-13
科技创新导报(2016年9期)2016-05-14
足球周刊(2014年21期)2014-07-03
中国扶贫(2014年8期)2014-06-27
中学生数理化·八年级物理人教版(2014年2期)2014-04-02
环球时报(2009-09-09)2009-09-09
环球时报(2009-07-28)2009-07-28
琴童(2009年3期)2009-03-13
人民交通(2009年1期)2009-01-19
