易分宝
——智慧城市自动分类垃圾桶系统设计
2022-03-05 06:36左露洁狄雨洋肖权珈刘冬阳
资源信息与工程 2022年1期
左露洁, 张 幔, 狄雨洋, 肖权珈, 刘冬阳, 李 硕
(中南大学 能源科学与工程学院,湖南 长沙 410083)
0 引言
当前,垃圾分类制度在许多地区逐步推行,垃圾分类投放、收集、运输、处理系统逐步建立。但现阶段我国垃圾分类主要依靠政府引导,存在垃圾种类繁多、居民参与度不高、设备不够便捷创新等多方面的问题(图1)。目前绝大部分地区仍采用普通垃圾桶组合的形式开展垃圾分类,随着智能化时代的到来,人们对智能垃圾桶寄予更高期望。目前已提出的垃圾桶自动分类方案主要有:传感器识别:早期的智能垃圾桶通过添置不同的传感器,如金属传感器、红外传感器识别出金属、塑料等特殊材质的垃圾,但识别种类有限[1-2];编写深度学习神经网络,主要通过嵌入树莓派识别:将树莓派作为主控制器,利用

图1 垃圾种类繁多,分类落实困难
相关模型和图像算法,判断图像中垃圾类型[3-7],但由于运算不足,神经网络模型简单,识别效果并不理想;语音识别:通过识别扔垃圾者口述待扔垃圾的名称,指导扔垃圾者对可回收、厨余、有害和其他这四大类垃圾进行正确的分类和投放[8-11],但该系统高度依赖扔垃圾者的参与,且可能会因为扔垃圾者的口音、方言以及普通话的标准度对垃圾识别的精准度造成影响。
1 设计方案
智能垃圾分类处理系统——易分宝,在公园、校区或街道等一定区域内均可使用。设计主要分为垃圾桶结构的硬件部分以及后台管理系统的软件部分,其中硬件部分主要包括供电组件、分类装置以及初步处理装置,软件部分主要是对该区域内垃圾桶运行的后台管理与监测。具体流程、结构图如图2、3所示。

图2 分类流程图
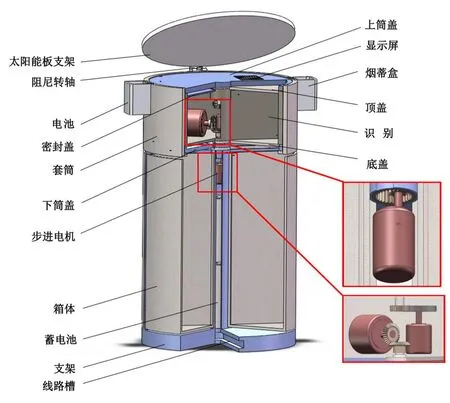
图3 易分宝结构图
1.1 硬件设计
1.1.1 供电组件
光伏组件供电系统主要由太阳能板、控制器以及蓄电池组成。考虑到我国太阳能资源分布差异,为提高太阳能板的工作效率,采用阻尼转轴作为太阳能板与垃圾桶的连接,可调节太阳能板的倾斜角度,使之达到当地最佳日照角度;为使结构紧凑,蓄电池放置在支架空心轴内,并连接电板与用电元件,在桶底开有线路槽,供蓄电池的充电。
1.1.2 分类装置
垃圾桶盖自动开合装置的主要部件为热释电传感器和步进电机。顶盖上的显示屏用于显示识别及分类结果。当行人走进预先设置的阈值范围内,热释电传感器响应并向单片机发出信号,单片机接收信号后发出指令,触发步进电机运作,使桶盖向一侧旋转打开。当行人远离时,热释电传感器与步进电机做出响应控制桶盖闭合。此过程中行人无需触摸垃圾桶,有效避免细菌感染。
垃圾识别装置主要由摄像头模块、单片机模块以及远端后台管理系统组成。摄像头模块放置在扇形识别筒内用于获取垃圾图像,通过ATK-ESP8266 WIFI模块传输给后台管理员系统,内壁的LED灯带补充摄像头获取垃圾图像时所需的光照强度,由继电器控制开关,有效降低LED灯带的能耗;后台管理系统借助百度AI EasyDL平台定制训练所得的神经网络模型对图像进行识别、分类,分类结果再通过ATK-ESP8266 WIFI模块传输回单片机,完成垃圾的识别。

图4 机械分类装置
垃圾收纳装置主要由烟蒂耳盒、电池耳盒以及扇形垃圾桶组成。烟蒂耳盒与电池耳盒悬挂在识别筒两侧,用来单独回收高污染的废旧电池和有燃烧风险的烟蒂,便于保洁人员回收;扇形垃圾桶采用合页与支架相连,回收垃圾时只需拉动手柄即可将垃圾桶移出。
1.1.3 初步处理
对垃圾的初步处理方案包括活性炭包净化空气和双层垃圾袋沥水。活性碳包放置在镂空的密封盖与识别区之间,利用其对气体分子的吸附性,实现垃圾桶内部的空气净化。目前对于湿垃圾主要有两种处理方法:厨余粉碎机和沥水篮。清华大学张明武等人在苏州市居民小区开展的试点工作表明,源头沥水措施的实施成本低廉,减量和提质效果可观[12],因此易分宝采用双层垃圾袋,实现对湿垃圾的沥水减质。如图5所示,双层垃圾袋内层为细网状,外层为底部有活塞的普通垃圾袋。管理人员在回收时只需要回收内层垃圾袋,打开活塞排放外层垃圾袋积聚的污水,即可对湿垃圾进行回收。

图5 双层垃圾袋
1.2 软件设计
后台管理系统使用Java语言编写,界面如图6所示。建立在图像分类方面效果良好的ResNet迁移学习模型;以华为云人工智能大赛·垃圾分类挑战杯的数据为基础,同时添加了Gary Thung 和Mindy Yang创建的垃圾图像数据,构成了一个35类共12 811张图片的数据集,对模型进行训练及测试。
实物模型如图7所示。模型底圆直径350 mm,预计投入使用的垃圾桶底圆直径为600 mm,整体高度为1 030 mm,占用空间约0.29 m3。
预期利用GPS芯片实时监测垃圾桶所处的地理位置以及周围环境,从而实现防盜的功能[13];大规模的应用时,可为该区域内的每个垃圾桶编号,将编号与其地理位置信息存入数据库,通过编号定位该垃圾桶的位置,从而降低综合成本。

图6 后台管理系统界面

图7 实物模型图
当垃圾桶内所装垃圾达到80%时,单片机接收传感器的信号,反馈给后台管理系统,通知管理人员及时清理;当垃圾桶已满而又暂无管理人员处理时,可以暂时停止运行并在显示屏上显示相关的提示信息,提示行人使用附近的其他垃圾桶。
2 运行状况
利用百度EasyDL平台以及已构建的垃圾图像数据集对神经网络模型进行训练,训练完成后在原数据集中随机抽取861张图片对训练后的模型进行测试。如图8所示模型整体分类指标:准确率、精确率、召回率、F1 score的评估具体情况,在包含34个类别的情况下,准确率达约89.0%。

图8 模型整体评估图
之后又实际测试了50件日常垃圾(如洗发水瓶、碎瓷碗、快递包装盒等),识别结果全部正确,案例如图9和图10所示。其中,识别结果中第一个字母“k”表示可回收垃圾,“c”表示厨余垃圾,“q”表示其他垃圾,“h”表示有害垃圾,后面的字母为识别出的垃圾种类的拼音,如图9中的“h_yao_wu”表示“有害垃圾:药物”。

图9 有害垃圾测试正确案例

图10 可回收垃圾测试正确案例
使用的太阳能电板为540 mm×540 mm的40 W单晶太阳能板,在标准测试条件下(辐射强度为1 kW/m2,组件温度25 ℃,大气质量AM1.5),工作电压约为17.5 V,工作电流约为2.29 A。采用四节标准容量的3 400 mAh的松下18650充电锂电池,该锂电池实测的充满电容量为3 480 mAh,初步计算得标准测试条件下6 h可以充满。但由于实际的太阳照射情况大多达不到标准测试条件,实际的充电时间会更长。而使用的电子元件都为低功率元件,工作时的耗电约为8 W,因此光照条件良好时可以实现自主供电。控制装置元件的工作性能如表1所示。

表1 控制装置元件的工作电压及电流
3 结语
本文设计了一种自动分类智能垃圾桶——易分宝,利用后台管理系统与机械分类装置结合实现垃圾分类存放,以期解决垃圾自动分类问题。运行结果表明:①经过大量数据训练后,该系统识别垃圾准确率达89.0%,而对日常垃圾的识别准确率更高;②装置可通过单片机控制机械分类装置运行,实现垃圾正确分类存放;③光照条件良好时可以实现自主供电;④后台管理系统可以监测设定区域内所有垃圾桶的工作状况。
猜你喜欢
大灰狼画报(2022年2期)2022-05-23
好孩子画报(2021年2期)2021-03-15
动漫界·幼教365(小班)(2020年12期)2020-12-14
作文与考试·小学高年级版(2020年19期)2020-11-16
快乐作文(3.4年级)(2019年5期)2019-09-10
文化交流(2019年1期)2019-01-11
发明与创新·大科技(2018年2期)2018-03-17
读者·校园版(2018年3期)2018-01-18
红领巾·探索(2017年12期)2017-12-26
中学科技(2015年2期)2015-04-28