
江汉七桥三跨连续钢箱系杆拱施工定位关键技术
2022-03-04 21:52:22杜操窦雪飞李施展
中国水运 2022年2期
关键词:施工测量
杜操 窦雪飞 李施展











摘 要:武汉江汉七桥主桥为三跨连续钢桁系杆拱,采用先拱后梁法施工,边跨钢梁在支架上散拼定位,中跨采用斜拉扣挂悬臂法施工,利用拱上吊机单杆件散拼吊装定位。主拱在厂内预拼时测量节点坐标,进行线形验收测量及桁高、桁宽、预拼总长结构尺寸验收测量等;桥位处进行散拼吊装时采用一种钢箱桁架拱桥安装定位及监测一体化的测量方法,结合一种可以测量出节点坐标的微型磁力棱镜,进行施工定位及施工监测,通过精准监测数据,在BIM模型上分析,为主拱弦杆的安装提供准确的安装指令,主拱合龙后的拱肋线形完全满足设计要求。
关键词:钢桁拱桥;节点定位;主拱线形;施工测量;施工监测
中图分类号:U445.4 文献标识码:A 文章編号:1006—7973(2022)02-0149-05
1工程概况
武汉江汉七桥主桥为132m+408m+132m三跨连续钢桁系杆拱桥,全长672m,主跨矢高90m,全桥共56个节间,边跨各11个节间,中跨34个节间。主拱采用N形桁,拱肋线形为抛物线[1],横向两片桁拱,桁间标准桁宽为34m,汉口侧钢梁有98m为曲线变宽段,其桁宽为满足道路线形的需要逐渐增加为39.5m。中跨跨中桁高10m,支点桁高39m,节间长度12m。
大桥采用先拱后梁法施工,边跨钢梁在支架上散拼定位,中跨采用斜拉扣挂悬臂法施工,三对吊索分级张拉,结合边跨配重三级加载,利用拱上吊机单杆件散拼吊装定位。主拱采用位移补偿+顶落梁法进行线形控制,中跨合龙采取预偏的方式补偿合龙口位移[2],最终完成主拱的精确合龙。江汉七桥施工方案立面布置如图1所示。
2主拱施工定位测量难点
(1)主拱在厂内采用“5+1”辗转卧拼法,测量特征点位于外侧节点处,卧拼时,节点方向朝向地面,测量空间小,精准测量节点三维坐标的难度大。
(2)悬臂端散拼时,高空定位难度大,环口测量精度低,定位数据需要进行转换至节点位置的三维坐标,测量及转换精度低。
(3)主拱弦杆在温度、日照、风速等环境影响下,数据变化不规律,并且容易受到栓焊施工、拱上吊机前移、加载等因素下产生变形,需要选择合适的方法进行定位测量。
(4)采用常规测量方法,人员在钢桁拱上立棱镜杆进行测量,高空作业安全风险高。
3厂内预拼装测量
主拱在厂内单杆件加工完成以后,在预拼厂进行试拼装,采用“5+1”辗转卧拼法,每个节间拼装杆件有上弦杆、下弦杆、竖杆、斜腹杆,每根杆件上布设验收测点,在环扣10cm处和节点处分别做样冲眼,深度不小于2mm,拼装前先在厂内布设局部控制网,采用平面三等、高程三等的要求进行局部控制网建立;测量卧拼时每个节间的外侧腹板节点三维坐标,检查桁长、桁高、轴线、扭转、预拼总长等,通过采用检定钢尺多测回进行量距、高精度全站仪加以复核的方法[3]进行验收,待线形验收合格后,安装阴阳耳板定位匹配件以及箱口内承压定位匹配件,完成设计要求的主拱制造线形。
由于汉口侧有98m长曲线变宽段钢梁,结构复杂,为减小预拼竖向高度,采用卧拼之后,弦杆在胎架呈现“V”字型结构,常规的平面线形测量方法,已经无法满足曲线段测量验收精度的要求。基于BIM的施工场地布置[4],利用BIM模型模拟场地预拼装状态,细化预拼装二维CAD图纸,进行试拼装,采用Tekla钢结构软件建模,取出Tekla模型中预拼的6个节间弦杆,进行三维旋转,将预拼装的上下弦杆保持轴线重合,以中间弯折处为支点,两边环口处于同一水平线上进行预拼,采用高精度全站仪TS30对节点三维坐标进行采集,在CAD图上进行三维匹配,选取预拼段的首尾和拐角三点与BIM模型提取的设计三维图进行三维匹配。通过匹配得出预拼总长、节间长度、节间高度、V字型轴线的差值进行调整,直至线形满足设计要求。
4施工控制网的优化与加密
4.1首级控制网优化
本项目平面坐标系为北京54坐标系,采用3°带高斯投影,中央子午线为东经114°,测区平均高程面为20m,高程基准为1985国家高程基准。设计交桩的控制网等级为平面四等和高程四等,根据桥梁跨度,依据公路勘测规范,单跨超过300m桥梁应按平面三等、高程三等测设[5],首级控制网精度不满足规范要求,为满足大跨度连续梁施工精度及公路勘测规范,对设计交付的首级控制网进行优化,采用“一点一方向”[6]对首级控制网进行优化,即在测区控制网内选取一个固定控制点坐标作为工程控制网的起算点,以线路里程中线方向的方位角作为工程控制网的起算边,从而建立相对独立的施工坐标系。
4.2主桥控制网加密
三跨连续钢梁安装定位之前,按照“先整体后局部,先控制后碎步”的原则[7],进行平面控制网及高程控制网的复测和加密,首先对桥梁控制网进行复测,在桥梁控制网精度满足规范要求的基础上,在中跨江边布设大地四边形控制网,控制点采用强制对中墩,进行钢梁范围内局部控制网加密。通过加密网进行0号墩至3号墩墩顶的贯通测量,贯通测量点分别与南北两岸多个控制点通视,在进行墩顶布置时,分别以该墩顶加密点为测站[8],可以精确放样支座垫石设计轴线及安装支座,确保钢梁墩顶节点与支座位置保持一致。
5桥位弦杆安装定位
5.1边跨弦杆安装定位
边跨钢梁在支架上散拼定位,钢梁构件安装从边墩开始向中跨逐节间匹配架设,主桁由下至上架设,两侧主桁同步推进,节间构件安装顺序为桥面板→下弦杆→竖杆→斜杆,上平连、横联在节间主桁及车行道桥面板匹配完成后安装,一个节间安装完成后方可进行下一节间安装。
安装之前先在支架上放样出杆件底部标高,抄垫平整;在垫柱上放样出待安装杆件轴线位置及杆件梁端位置;杆件吊装落位后进行初定位,采用一种架设主桁的焊接式下弦杆的定位方法[9],将阳头耳板穿入阴头耳板,打入销轴进行固定;随后在箱室内加上垫座进行箱口底部固定。初定位完成以后,采用全站仪TS30测量杆件的两端顶面,距离杆件拼接环口处10cm位置,测量其轴线偏位、高程、扭转、梁端里程等,进行微调,精确定位完成以后,方可进行下一根杆件的安装定位。
5.2中跨弦杆安装定位
5.2.1弦杆安装定位流程
中跨采用斜拉扣挂悬臂法施工,三对吊索分级张拉,结合边跨配重三级加载,利用拱上吊机单杆件散拼吊装定位。因为悬臂吊装过程中,每一根杆件的安装都会荷载,导致杆件线形发生变化,所以严格安装拼装顺序进行,拱肋安装顺序为上游侧下弦杆→下游侧下弦杆→斜杆→竖杆→上游侧上弦杆→下游侧上弦杆→平联。
利用结构BIM模型找到每根杆件重心,根据重心及吊耳位置,调节好钢丝绳长度,使安装时杆件能处于一个较好的安装姿态(相对理论状态前端略上倾)在起吊后,在杆件截面两个腹板顶部设置阴、阳头耳板,并采用销轴式连接;在两个腹板下的箱内设置以沿杆轴线受压为主的承压板结构,两边承压板用螺栓纵向连接限位,完成初定位。采用全站仪TS30测量杆件空间三维坐标进行微调,精确定位后,继续安装下一根杆件。
5.2.2杆件定位测量及监测一体化
中跨拱肋上下弦曲线方程均为二次抛物线,拱肋上弦与边跨主桁上弦采用R=500米的反圆曲线过渡,线形均由54个节点组成,每个节点之间用直线连接,以直代曲,组成的抛物线及圆曲线来构成主拱线形。从BIM模型中可以看出,利用有限元程序建立钢桁拱桥的空间计算模型,也是基于节点做的受力分析,杆件拼接环口容易受到焊接及栓接施工产生的变形 ,而整体节点的构造均有足够的抗疲劳强度[10],所以直接定位节点空间三维坐标是控制主拱线形的核心。
整体节点结构一般为钢桥的主要受力结构,同时也关系到全桥线形、合龙精度等关键点[11],杆件安装定位测量,以腹板外侧节点作为定位点,采用定制研发设备的3D打印机,以三维数字模型为基础,自制一款可以精准对中主拱弦杆节点中心,并且测量精度高的微型磁力棱镜头,一种可拆卸式全站仪棱镜磁力转接头[12]。提前在待安装杆件上,采用强力粘胶,将带有强磁力的棱镜安装到杆件节点样冲眼处作为永久观测点,单根定位→节间竣工→线形监测→合龙测量→成桥线形监测均采用节点中心数据作为控制依据,形成一套钢箱桁拱桥安装定位及监测一体化的施工方法[13]。利用杆件匹配件初定位完成后,采用全站仪TS30,测量节点中心三维坐标与监控指令对比,并检查桁高、桁宽、轴线偏位、里程、转角等,进行微调,待满足设计要求后进行下一根杆件的安装定位。
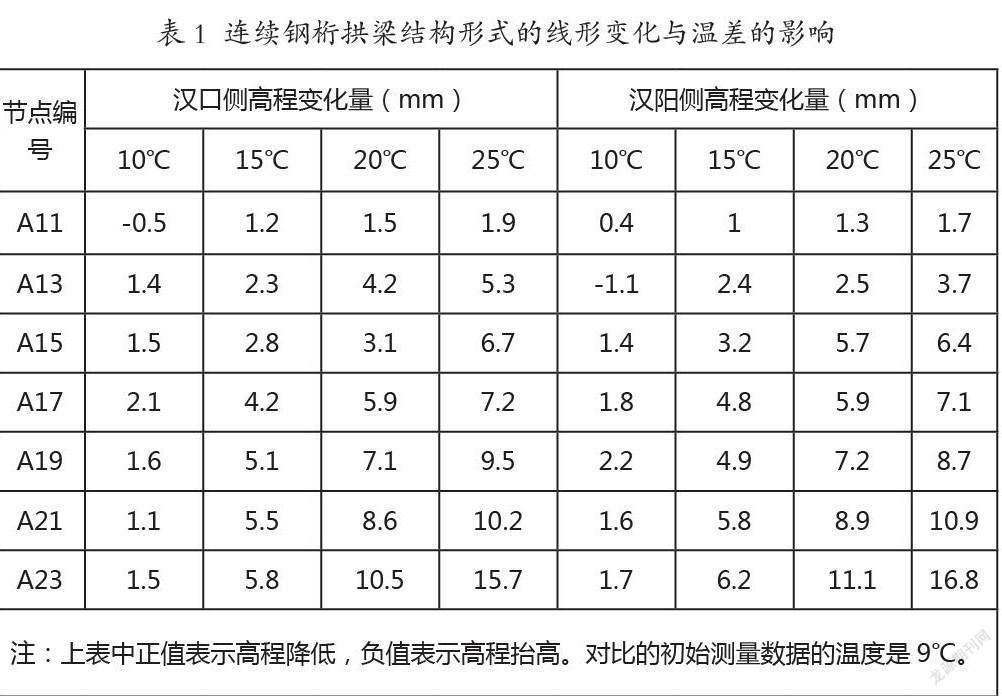
基于江汉七桥钢桁拱温度场的长期监测数据,利用均匀温差分析方法对连续钢桁拱的弦杆、吊索在温差变化下主拱节点线形偏差进行了分析,揭示了连续钢桁拱梁结构形式的线形变化与温差的影响非常大。所以测量的时间选择在凌晨1:00~5:00之间进行,白天安装的杆件参照凌晨定位的前五个节间的趋势进行调整。
施工定位线形测量如图8所示,当安装定位第三段时,根据杆件自重及拱上吊机自重的加载,前两对吊索发生弹性变形,此时在B、C点的标高降低,当D点进行第三对吊索张拉时,此时在B、C点的标高上抬[14],根据BIM模型模拟有限元分析出待架设杆件对已安装杆件的影响,每次安装完成一个节间必须进行后面五个节间的线形测量,每一次吊索张拉前后,都要进行全桥的节点线形测量,监测施工过程中钢桁拱桥各节点高程、平面坐标变化情况[15],与BIM模型进行匹配,为下一节间的监控指令提出更精准的数据支持。
5.3合龙施工测量
采用“纵移”的合龙方法:通过以汉阳侧钢梁的纵移,从而实现钢梁合龙口杆件精确合龙。调整索力来改变钢梁悬臂端合龙口的位移和转角,以及在主墩顶布置大吨位千斤顶设备调整转角等方案作为备选,主拱安装定位精度高,无需改变转角的情况下,采用纵移即可完成精确合龙。
敏感性分析:为了使主拱实现无应力合龙,需建立数值模型,对合龙口进行敏感性分析[16]。通过主拱合龙口变形连续测量,监测两端线形变化情况,找出合龙口长度随时间和温度变化规律,通过连续72h的变形测量[17],每2小时进行一次,通过数据进行温度敏感性分析。绘制纵向位移—时间—温度(合龙口尺寸)图、横向位移—时间—温度(日照) 图、竖向位移—时间—温度(合龙前)图、高程线形趋势(合龙前)。
合龙时间:钢梁中线偏位与日照方向有关,当太阳照在一侧,钢梁中线偏另一侧,钢梁的高程、里程变化与温度有关,根据环境监测明确凌晨1:00~5:00进行合龙。
合龙口测量:在合龙口布设了微型磁力棱镜,进行合龙全过程线形监测,合龙口分别采用4把鉴定钢尺,以多次量距确定相对偏差为主,合龙口绝对偏差测量为辅。
测量时间:钢梁中线偏位与日照方向有关,当太阳照在下游侧,钢梁中线偏上游,当太阳照在上游侧,鋼梁中线偏下游;钢梁的里程变化与温度有关,当温度升高时,钢梁逐渐变长,当温度降低时,钢梁长度逐渐变短;钢梁的高程与温度有关,当温度升高时,钢梁逐渐下绕,当温度降低时,钢梁逐渐上拱,因此钢梁线形测量时间选择凌晨1:00~5:00进行。
合龙口实测偏差:在顶推合龙前,通过连续测量分析合龙口数据,测得合龙口误差见表2。从表2中看出,合龙段无明显转角偏差,合龙口轴线、高差等相对偏差均控制在3公分以内,不需要强制合龙措施以及张拉吊索调整,直接进行顶推合龙。
6结语
武汉江汉七桥三跨连续钢桁拱结构施工复杂,边跨又属于曲线渐宽段,体系转换多,杆件能够精准定位,主拱能够顺利合龙,其主要措施如下:
(1)采用检定钢尺多测回进行量距、高精度全站仪加以复核的方法进行验收,确保主拱的无应力制造线形;
(2)优化首级控制网并建立主桥高精度局部控制网;
(3)桥位安装定位时利用结构BIM模型找到每根杆件重心,调整姿态,用阴阳耳板及箱内定位匹配件在空中固定,完成初定位;
(4)国内首次使用一种钢桁拱定位测量及监测一体化的施工方法,搭配一种微型磁力棱镜,直接进行主拱节点测量,无需任何数据转换,即可完成杆件的精确定位,并作为永久观测点,为主拱线形及合龙测量提供精准数据;
(5)主拱合龙时采用人工量距为主,绝对测量为辅,完成主拱精确合龙。该关键技术融合了多项首创施工技术,为同类型钢桁拱的安装定位提供了宝贵的借鉴意义。
参考文献:
[1]徐伟,王恒,李少骏.常泰长江大桥专用航道桥设计[J].桥梁建设,2020,50(06):85-90.
[2]孙玉祥,汪存书,蔡新民.预偏补偿悬臂端位移在钢桁架拱桥跨中无应力合拢施工中的应用[J].水运工程,2010,(01):117-121.
[3]林世发,杨学军.武汉天兴洲公铁两用长江大桥钢梁散拼节段与整节段匹配测量技术[J].桥梁建设,2008,(02):1-4.
[4]张海华,刘宏刚,甘一鸣.基于BIM技术的桥梁可视化施工应用研究[J].公路,2016,61(09):155-161.
[5]JTG C10-2007,公路勘测规范[S].
[6]龚率,刘晓华,黄志伟,杨君祥.基于GPS网“一点一方向”平差的变形监测建网研究[J].工程勘察,2015,43(01):89-92.
[7]程效军,鲍峰,顾孝烈.测量学[M].上海:同济大学出版社, 2015.
[8]崔巍,杨涛.南京大胜关长江大桥六跨连续钢桁拱梁施工控制测量[J].桥梁建设,2010,(01):5-7+16.
[9]刘生奇.一种架设主桁的焊接式下弦杆的定位方法[P]. 中国专利:CN112176868A,2020-09-04.
[10]王天亮,王邦楣,潘东发.芜湖长江大桥钢梁整体节点疲劳试验研究[J].中国铁道科学,2001(05):96-100.
[11]刘洋.钢桁梁桥焊接整体节点杆件制造技术探究与实践[A].《工业建筑》2016年增刊Ⅱ[C].工业建筑杂志社,2016:4.
[12]李施展.一种可拆卸式全站仪棱镜磁力转接头[P]. 中国专利:ZL201921572708.9,2019-09-20.
[13]窦雪飞.一种钢箱桁拱桥安装定位及监测一体化的施工方法[P].中国专利:CN112525091A,2020-11-04.
[14]駱中林.斜拉扣挂钢箱拱桥施工控制及吊装精度影响因素分析[D].长沙理工大学,2008.
[15]张春新,张家什,刘承亮.三岸邕江特大桥施工监控研究[J].世界桥梁,2015,43(06):37-41.
[16]芶洁,周仁忠.超大跨径钢桁架系杆拱桥合龙施工控制技术[J].中国港湾建设,2010(02):65-69.
[17]肖根旺,朱顺生,王翔千米超大跨径斜拉桥施工测量关键技术研究[J].桥梁建设,2018,48(1):13-18.
猜你喜欢
中华建设科技(2017年9期)2017-11-04 08:49:22
环球人文地理·评论版(2017年2期)2017-08-01 15:12:12
科学与财富(2017年20期)2017-07-10 10:18:35
中国科技博览(2017年13期)2017-06-05 21:26:25
科学与财富(2017年15期)2017-06-03 20:27:46
中国科技博览(2017年12期)2017-05-31 06:09:34
中国科技纵横(2016年22期)2017-05-27 00:02:44
建材发展导向(2017年1期)2017-03-24 13:01:47
中国科技博览(2016年12期)2016-05-09 02:02:14
中国科技博览(2016年10期)2016-04-29 19:49:03
