旅客登船桥活动渡板及其自动控制方法
2022-03-04 22:02刘里吉陈贤毅
中国水运 2022年2期
关键词:电控系统
刘里吉 陈贤毅
摘 要:本文介绍了旅客登船桥接船活动渡板结构组成,对登船桥接船活动渡板的功能需求进行了详细的分析,着重介绍活动渡板在坡度、漂移及横移等方向上自动调整方案和自动控制方法。
关键词:登船桥;接船口;活动渡板;摆杆组件;电控系统
中图分类号:U695.1 文献标识码:A 文章编号:1006—7973(2022)02-0079-03
旅客登船桥是一种码头配套特殊设备,为乘客提供无障碍、舒适的登船服务。同时旅客登船桥设备还需能跟随潮汐、风浪及上、下车辆对船舶的摇晃,做出及时调整,以达到实时动态接船,为船舶提供安全可靠的接靠服务。
1 活动渡板组成介绍
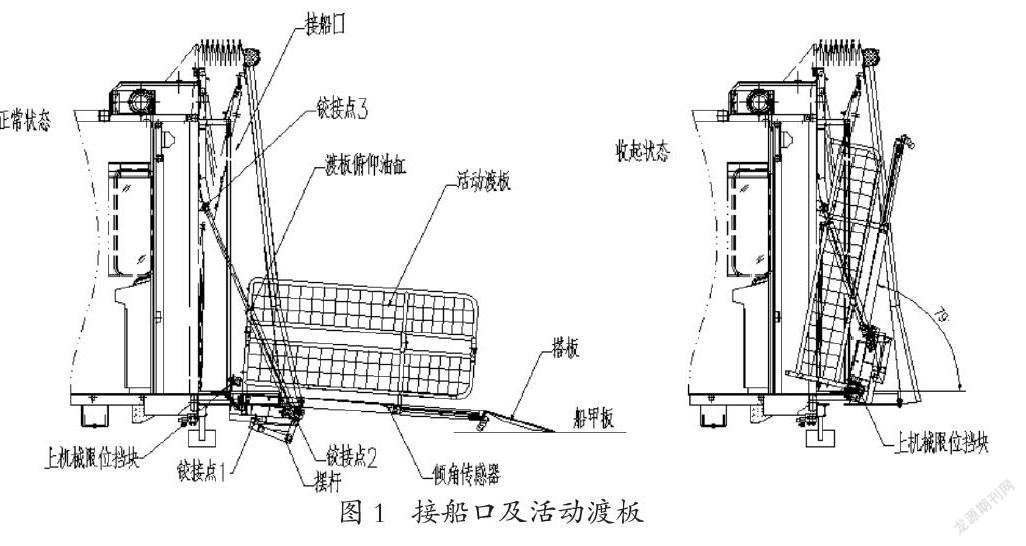
旅客登船桥活动渡板设于接船口前端,用于与船舶进行对接,当活动渡板放下时,活动渡板前端搭接在船甲板上,活动渡板前端底部设有万向轮,使得活动渡板可在甲板上前后左右移动。见图1
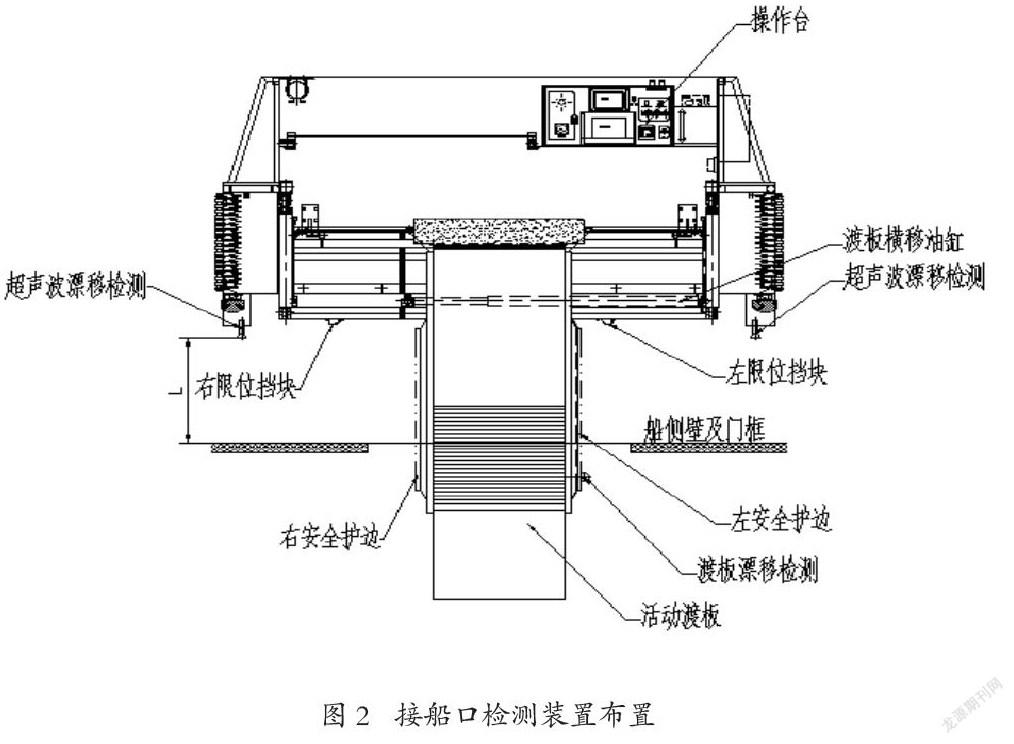
活动渡板检测包括活动渡板坡度感应装置、超声波探测器、渡板漂移检测装置以及渡板偏移检测装置,均与电控系统连接。
活动渡板底部安装坡度检测装置,用于采集并反馈活动渡板倾角信号;超声波漂移检测用于采集并反馈接船口与船舶之间的垂直距离信号;渡板漂移检测装置以及渡板左、右安全护边,分别用于检测并反馈活动渡板的相对接船口的前后漂移信号以及相对接船口的左右偏移信号。见图2
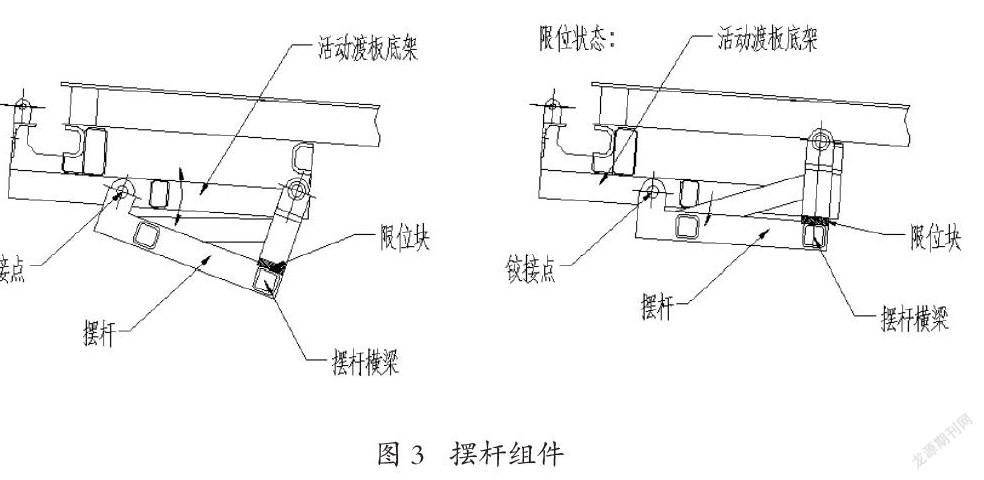
活动渡板摆杆组件包括摆杆、摆杆横梁以及限位装置,其中摆杆的一端与活动渡板铰接,另一端与俯仰油缸铰接,摆杆设有限位装置。见图3
当俯仰油缸伸出,活动渡板的自重作用下,随摆杆组件一起向下转动,至活动渡板前端搭接在船甲板上后,油缸继续伸出至最长,推动摆杆组件继续向下转动,使得摆杆组件与活动渡板分离,从而使得活动渡板能完全跟随船甲板高度的变化而上下运动,进而达到了实时感应船甲板高度变化信号,做到无延时响应。
活动渡板回收时,俯仰油缸带动摆杆转动,至摆杆横梁限位挡块与渡板底架接触限位后,渡板及摆杆组件一起随俯仰油缸提升而收回。
2 登船桥活动渡板功能要求
登船桥核心部件为接船口活动渡板,登船桥活动渡板及其控制方法尤为重要,登船桥接船口活动渡板接船功能要求以下四点:
(1)渡板俯仰的油缸与活动渡板的连接处增加一摆杆,从而使活动渡板被完全放下时,活动渡板可在一定角度范围内自由摆动,从而实现活动渡板实时跟随船甲板高度变化,做到无延时响应,提高接船及时性和可靠性;
(2)登船桥的自动跟随系统,可满足整个潮汐高度的自动跟随。进入自动模式后,无需人为手动操作调整,大大提高了登船桥的智能化程度;
(3)减少了登船桥自动调整的次数,提高旅客的舒适度;
(4)自动跟随系统增加渡板坡度的延时信息采集功能,避免瞬时海浪或者滚装车辆上、下船而造成晃动等现象对接船高度的影响,也避免频繁调整而造成登船桥的抖动等不良现象的发生,提高信息收集的准确性。
3 登船桥活动渡板控制方法
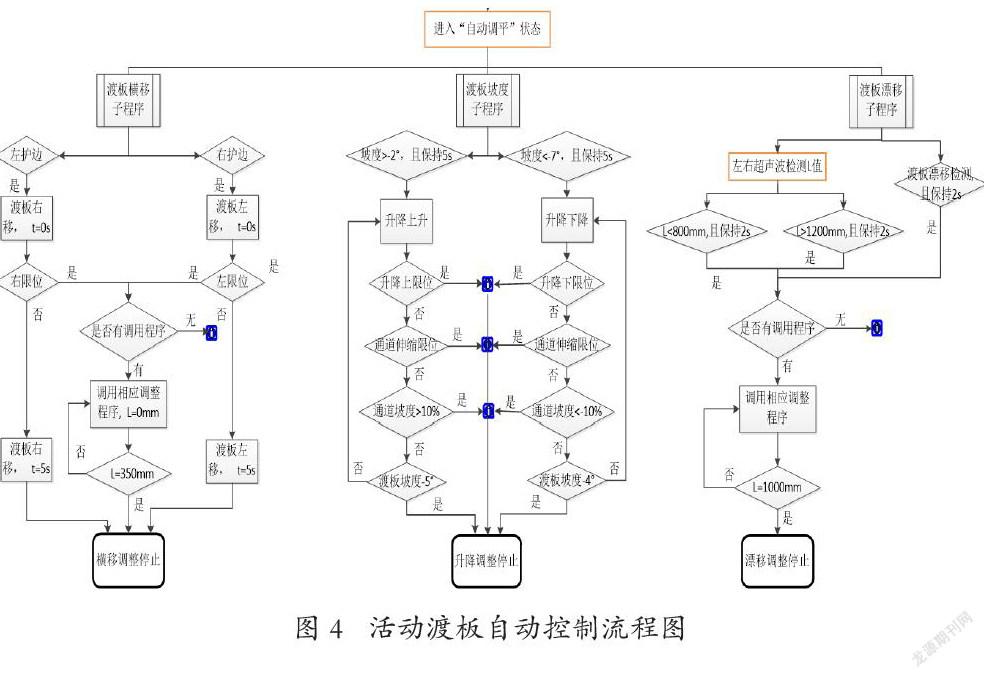
3.1 渡板坡度自动调整控制方法
在自动模式下,当坡度检测装置检测渡板坡度大于设定值(此设定上限值为-2°)且保持时间超过设定值(此设定值为5s)时,电控系统控制升降机构上升,同时电控系统判断旅客登船桥升降机构是否达到上限位;
如果旅客登船桥升降高度已触发上限位开关,则报警系统开始报警,停止上升动作;
如果旅客登船橋通道坡度超出设定限值范围,则报警系统开始报警,停止上升动作;
升降机构上升过程中,如果旅客登船桥通道坡度在设定限制范围内,则电控系统控制旅客登船桥继续上升,直至活动渡板坡度为设定值时停止上升动作(此设定值为-5°)。
当坡度检测装置检测渡板坡度小于设定值(此设定下限值为-7°)且保持时间超过设定值(此设定值为5s)时,电控系统控制升降机构下降,同时电控系统判断旅客登船桥升降机构是否达到下限位;
如果旅客登船桥升降高度已触发下限位开关,则报警系统开始报警,停止下降动作;
如果旅客登船桥通道坡度超出设定限值范围,则报警系统开始报警,停止下降动作;
升降机构下降过程中,如果旅客登船桥通道坡度在设定限制范围内,则电控系统控制旅客登船桥继续下降,当活动渡板坡度调整为设定值时停止下降动作(此设定值为-4°);
3.2 渡板漂移自动调整控制方法
在自动模式下,当接船口前端底部超声波检测距离船侧壁的距离小于设定值(此设定值为800mm)且保持时间超过设定值时(此设定值为2s),电控系统判断是否有控制程序调用;
当接船口前端底部超声波检测到距离船侧壁的距离大于设定值(此设定值为1200mm)且保持时间超过设定值时(此设定值为2s),电控系统判断是否有控制程序调用;
当渡板前端漂移检测超声波开关检测到船舶漂移信号,且保持时间超过设定值时(此设定值为2s),电控系统判断是否有控制程序调用;
如果电控系统判断无调用程序,报警系统发出声光报警,并在触摸屏上提示退出自动程序,手动操作后再接靠船舶;
如果电控系统判断有调用程序,电控系统控制执行调用程序,直至距离检测装置检测到船侧壁的距离为设定值时(此设定值为1000mm),电控系统停止程序调用。
3.3 渡板横移自动调整控制方法
在自动模式下,当活动渡板右侧安全护边与船舱门挤压后,电控系统控制渡板横移油缸缩回,使活动渡板左移,且保持渡板横移油缸动作时间为设定值(此设定值为5s)后停止动作;同时电控系统判断登船桥活动渡板是否达到左限位;
如果登船桥活动渡板横移已到达左限位,则报警系统开始报警,登船桥活动渡板左移动作停止,并判断是否有控制程序调用;
在自动模式下,当活动渡板左侧安全护边与船舱门挤压后,电控系统控制渡板横移油缸伸出,使活动渡板右移,且保持渡板横移油缸动作时间为设定值(此设定值为5s);同时电控系统判断登船桥活动渡板是否达到右限位;
如果登船桥活动渡板横移已达右限位,则报警系统开始报警,登船桥活动渡板右移动作停止,并判断是否有控制程序调用;
如果电控系统判断无调用程序,报警系统发出声光报警,并在触摸屏上提示退出自动程序,手动操作后再接靠船舶;
如果电控系统判断有调用程序,电控系统控制执行调用程序,接船口反方向移动设定值距离(此设定值为350mm)后停止。
4 总结
旅客登船桥接船口活动渡板自动控制方式大大减少了登船桥的手动操作调整次数,提高了登船桥的自动化和智能化程度;使旅客登船桥可在一次接靠后可全程自动调整,大大提高旅客登船桥的舒适度和旅客体验。
参考文献:
[1]陈一新,李春. 邮轮旅客登船桥新型接船渡板技术[J]. 中国水运(下半月), 2014, 14(9): 168-169.
[2]李春,胡思唐,黄国庆. 邮轮旅客登船桥型式及特点分析 [J]. 港口装卸, 2009, 09(4): 20-21.
[3]中国国际海运集装箱(集团)股份有限公司. 一种用于登船桥的渡板装置及登船桥[P]. 中国专利: 专利申请号:200610113754.3.
猜你喜欢
科技创新与应用(2017年2期)2017-02-09
科教导刊·电子版(2016年9期)2016-05-16
科技传播(2016年7期)2016-04-28
科技与创新(2015年23期)2015-12-08
科技与创新(2015年21期)2015-12-01
科技资讯(2015年8期)2015-07-02