
轮边驱动电动客车制动能量回收控制策略研究
2022-03-03 09:08陈晓冰
客车技术与研究 2022年1期
陈晓冰
(厦门金龙汽车新能源科技有限公司, 福建 厦门 361021)
轮边驱动电动客车具有传动链短、传动效率高、结构紧凑等优点,且整车易布置成与一级踏步等高的全平地板,因此日渐成为电动城市客车的重要发展趋势。电动城市客车的制动能量回收效率对其提高续驶里程具有重要意义。本文使用CRUISE与MATLAB/Simulink联合仿真的方法,研究轮边驱动纯电动客车制动能量回收的控制策略和效果。
1 制动能量回收控制策略
1.1 制动系统结构
如图1所示,本车采用传统机械制动与轮边电机再生制动相并联的制动系统,两套制动分系统相互独立,互不影响。踩下制动踏板后,前后轴机械制动力按一定的比例关系进行分配;整车控制器根据制动踏板开度、当前车速以及电池的荷电状态(SOC值)确定轮边电机的再生制动力控制策略。
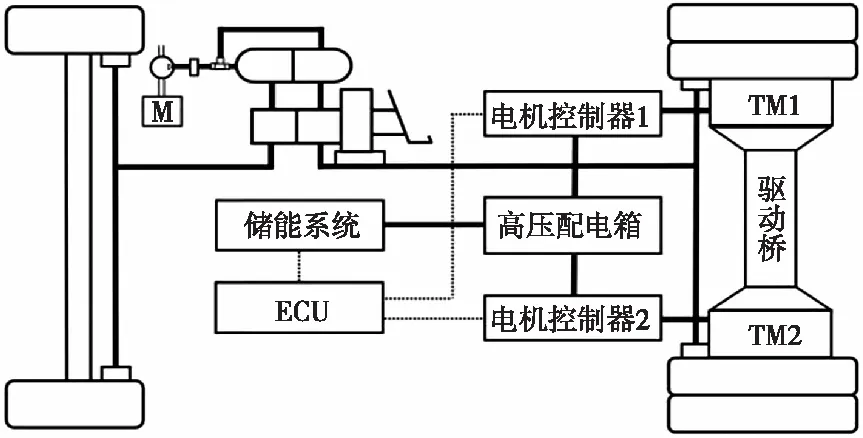
图1 轮边驱动纯电动客车制动系统的结构
1.2 前后轴制动力分配
首先根据整车相关参数进行前、后轴制动力分配设计。前轴因无驱动电机,所以仅有机械制动力;后轴制动力包括机械制动力与两个轮边电机的再生制动力。前、后轴制动力的分配应首先满足制动安全性的法规及标准要求。
为保证制动时汽车的方向稳定性和足够的制动效果,GB 12676—2014《商用车辆和挂车制动系统技术要求及试验方法》对前、后轴制动力附着系数、与制动强度间关系作出了明确要求,这些要求经整理可用式(1)表示:
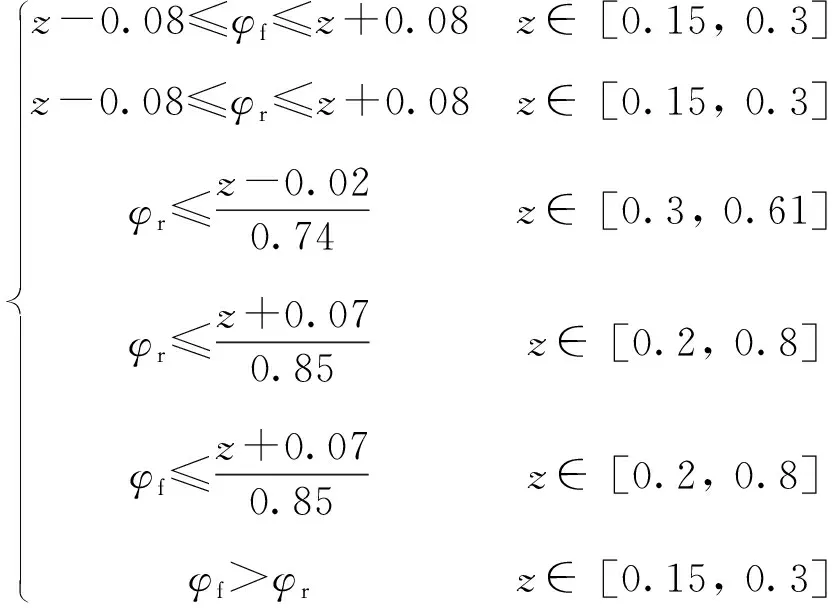
(1)
设前、后轴机械制动力分别为、,根据汽车理论,前后轮即将同时抱死时,重力、制动力和与制动强度之间的关系:
+=
(2)
传动机械制动系统中,制动器制动力与按固定比例(称为机械制动力分配系数)进行分配,公式:
=(+)
(3)
前、后轴利用附着系数公式:
=·/(+)
(4)
=·(1-)(-)
(5)
将式(2)~(5)代入式(1),可得符合GB 12676—2014标准要求的制动力分配关系:

(6)
根据式(6)中各不等式上、下限可绘制出制动力分配上、下限制曲线。当实际制动力分配曲线位于制动力分配上、下曲线之间时,对应制动力分配系数符合标准要求。本文相关曲线如图2所示。
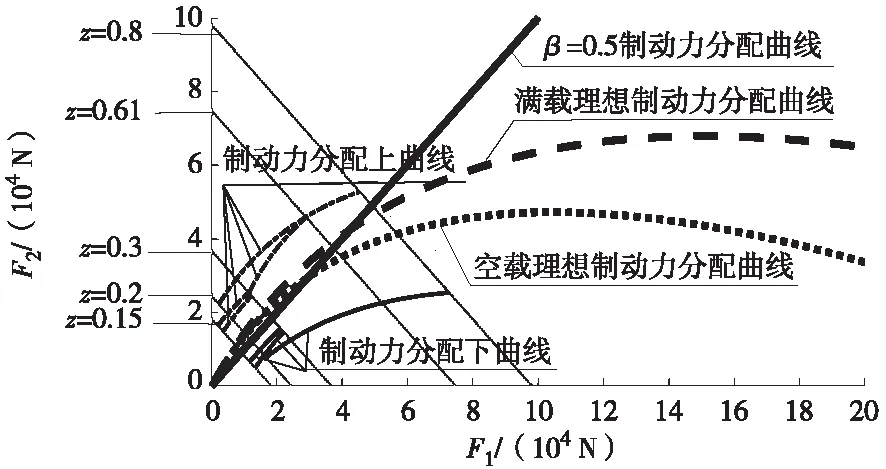
图2 前后轴制动力分配相关曲线
本文样车实际=0.5。由图2可知,机械制动分配的前、后轴制动器制动力分配曲线在相应范围内,介于制动力分配上、下限曲线之间,符合标准要求。
后轴引入两个轮边电机的再生制动力后,前轴制动力占总制动力比例降低,整车制动力新的分配系数较有所减小。

(7)
=(+)(-) /
(8)
将式(4)、式(5)代入式(1),得式(9):
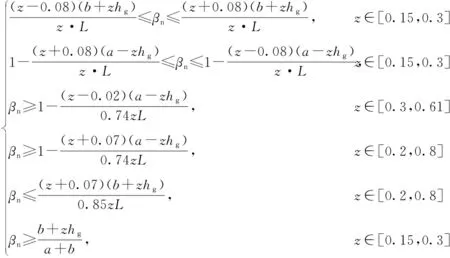
(9)
将相关参数、、、的空、满载值代入式(9)中的各不等式,可分别求出空、满载状态的的上、下限值,其中上限值A、B、C分别对应式(9)中第1、2、5不等式;下限值D、 E、F、G、H分别对应式(9)中第 1~4和第6不等式。分别绘出的上控线组A、B、C和下控线组D、E、F、G、H,其中满载状态如图3所示。=0.3时,由相应图可知,C线上为上控线组最小值,空、满载状态下其值分别为0.539 2和 0.549 8;D线上为下控线组最大值,空、满载状态下其值分别为0.425 5和0.433 9。
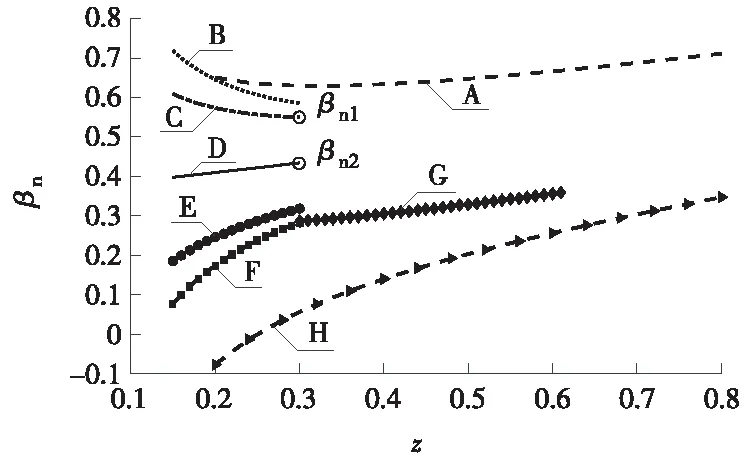
图3 满载状态βn的上、下控线与制动强度z的关系
结合实际车况,为符合标准要求,应满足式(10):
>≥≥
(10)
取空载状态下==0.425 5,此时再生制动力占整车制动力比例最大,由式(8)计算可得,最大再生制动力与机械制动力之间关系:
=0.175 1(+)
(11)
1.3 轮边电机制动能量回收控制策略
根据1.2节计算所得的轮边电机最大制动力,计算满足标准要求的空载状态下后轴轮边电机最大制动扭矩:
=·/()
(12)
式中:为轮胎滚动半径,取0.472 m;为轮边减速比,取13.91;为传动效率,取0.9。
机械制动力矩与机械制动力之间关系:
=· (+)
(13)
式中:为制动器摩擦力等效半径,0.385 m;为样车实际最大机械制动力矩,17 500 N·m。
根据式(11)、式(12)与式(13)计算可得:
=0.175 1·/()=300 N·m
(14)
图4为机械制动力矩与制动踏板开度关系的曲线。根据此关系曲线,综合考虑制动的安全性及平顺性,将轮边电机电制动分为3个区间,制定制动能量回收控制策略的算法如下:
1) Ⅰ区间,制动踏板的开度为0~22%。整车无机械制动力,仅有轮边电机的再生制动力。为防止出现后轴抱死侧滑,再生制动力所产生的制动强度应小于路面附着系数。
2) Ⅱ区间,制动踏板开度为22%~54%。制动力包括机械制动与轮边电机再生制动两部分,其中机械制动力曲线的斜率较为平缓,车速越高电机的再生制动力越大。
3) Ⅲ区间与Ⅳ区间,制动踏板开度为54%~100%。制动力也包括机械制动与再生制动,其中Ⅲ区间机械制动力曲线的斜率较陡,随着制动踏板开度的增大,机械制动力增大,轮边电机的再生制动力也增大;Ⅳ区间随着制动踏板开度增大,机械制动力与轮边电机再生制动力均保持不变。
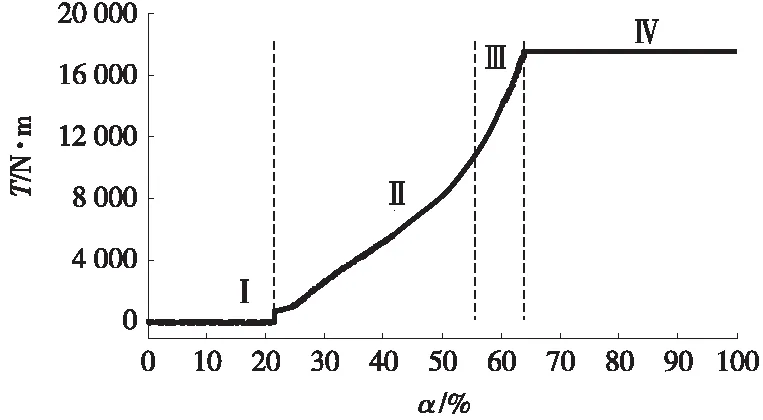
图4 机械制动力矩T与制动踏板开度α关系曲线
引入车速与电机效率MAP图,当轮边电机转速较低时,电机整体工作效率低,此时不进行制动能量回收。本车设定车速大于10 km/h时,才进行制动能量回收。随车速提升,制动需求扭矩逐渐增大;当车速大于45 km/h时,保持不变。根据驾驶员所踩刹车踏板开度、当前车速与电机效率,确定的关键点及其对应值,见表1。根据表1进行分段插值,得到不同下的与的关系制动曲线,如图5所示。
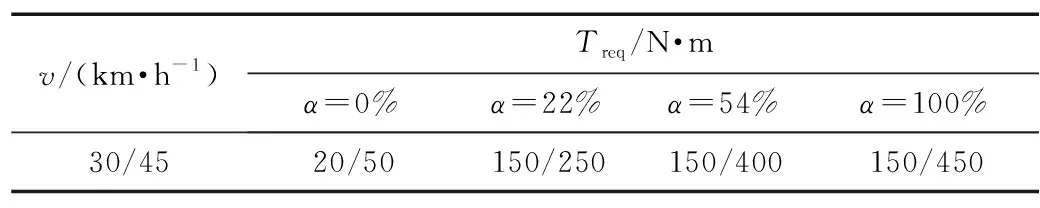
表1 需求扭矩Treq的关键点及其对应值
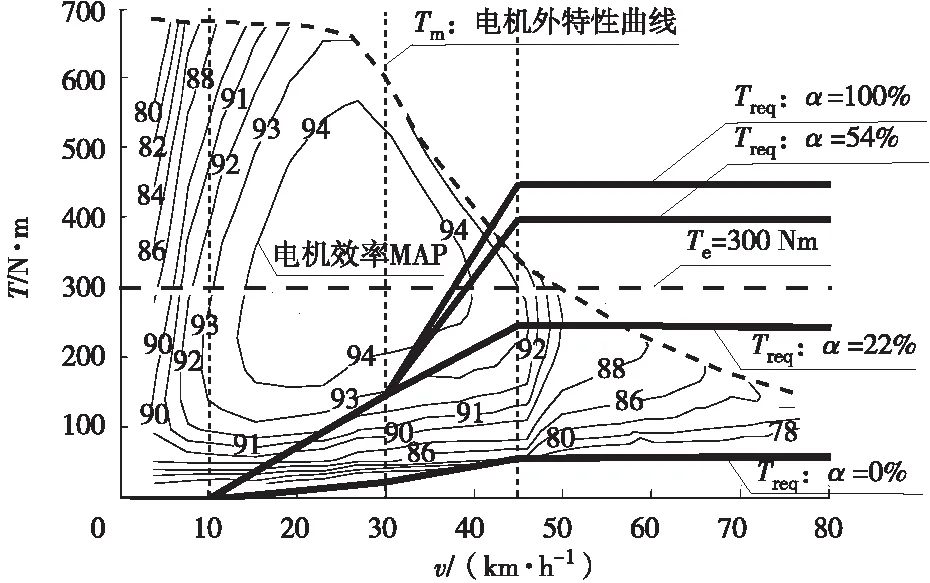
图5 轮边电机制动能量回收控制策略MAP图
轮边电机再生制动扭矩的大小还受到电池的充电能力、电池SOC条件的影响:为了防止电池过充,当电池SOC达到95%时,不再进行制动能量回收;制动能量回收时,轮边电机的制动扭矩不能超过电池发出的最大充电功率限制扭矩值;且制动的最大扭矩不应超过轮边电机的外特性。即轮边电机再生制动的控制扭矩值如式(15)所示:
=min(,,,)
(15)
通过该控制策略,使轮边电机在能量回收过程中尽量工作于高效区,以提高整车经济性。
2 联合仿真及结果分析
2.1 整车仿真模型建立
使用MATLAB/Simulink搭建轮边电机制动能量回收控制策略模型,基于CRUISE搭建整车仿真模型,将制动能量回收控制策略的模型编译成DLL文件,并导入CRUISE的MATLAB DLL接口模块中,创建相应的数据接口,完成数据连接。根据图6所示架构,搭建整车仿真模型,并进行CRUISE与MATLAB/Simulink的联合仿真。

(a) 制动控制算法 (b) 驾驶控制系统 (c) 整车仿真架构
2.2 仿真结果分析
建立中国典型城市循环工况循环任务,进行有无制动能量回收控制策略的仿真对比。初始设定SOC为50%,电耗仿真对比分析见表2。图7为轮边驱动仿真结果,表明:加入制动能量回收控制策略后,初始SOC为50%时,电耗降低了16.31%,降耗效果明显。

表2 仿真电耗统计结果
轮边驱动与中央直驱相比,可不考虑后桥主减速器对制动扭矩的限制,从而可以最大限度回收制动能量,图8为两者的仿真结果对比,表明:轮边驱动相比中央直驱,在加入制动能量回收控制策略后电耗明显降低。

图7 轮边驱动下有无电机制动能量回收电耗仿真对比

图8 直驱与轮边驱动形式电耗仿真对比
3 结束语
本文综合国家标准、电池SOC、车速与电机效率等因素,制定了轮边驱动纯电动客车的制动能量回收控制策略。通过AVL CRUISE与MATLAB/Simulink联合仿真,分析了该策略的应用效果。基于中国典型城市循环工况的电耗仿真结果显示,引入制动能量回收控制策略后电耗最大降低了16.31%。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
舰船科学技术(2022年11期)2022-07-15
内燃机与配件(2022年2期)2022-01-17
科学与财富(2021年33期)2021-05-10
汉语世界(The World of Chinese)(2019年3期)2019-07-01
数学大王·趣味逻辑(2019年5期)2019-06-13
山东工业技术(2019年9期)2019-05-29
戏剧之家(2018年21期)2018-10-19
电机与控制学报(2018年9期)2018-05-14
魅力中国(2016年31期)2017-06-15
