
电动拖拉机驱动控制系统建模与仿真分析
2022-03-02 09:44赵崇付司金冬龚立娇
新疆农机化 2022年1期
赵崇付,司金冬,龚立娇
(石河子大学机械电气工程学院,新疆石河子832000)
0 引言
农业机械化是实现农业现代化的重要一环,目前我国农业机械整体还是以燃油动力农机为主。然而燃油动力农机产生的尾气会严重污染环境,且尾气中含有的氮氧化物会给农作物生长带来危害,降低农作物产量[1-2]。因此,为完成国家“十四五”规划“加快推动绿色低碳发展”这一重点任务,研发绿色动力农机意义重大。
拖拉机作为最主要的农业动力机械,其技术发展水平在很大程度上可以体现出一个国家的农业现代化程度[3]。电动拖拉机作为一款新型农机,因具有低噪音、零排放、高效率、操作方便、适合大棚作业等诸多优点[4],可广泛应用于多种农业生产环节。
1 电动拖拉机驱动控制系统模型建立
永磁同步电机相比于其他类型电机有很多优点,如启动转矩大、体积小、噪音低、效率高、调速范围宽、过载能力强等[5],适合作为电动拖拉机的驱动电机。对于永磁同步电机的主要控制策略可分为直接转矩控制和矢量控制,由于矢量控制在电机动态运行过程中转矩响应快,低速控制性能较好,而直接转矩控制在低速时转矩脉动大[6],所以电动拖拉机的驱动控制系统采用矢量控制更适合。
1.1 永磁同步电机矢量控制原理
矢量控制技术最开始应用于感应电机,其基本思想是将直流电动机控制方法应用于三相交流电动机,在磁场定向坐标上,将电流矢量分解成相互垂直,彼此独立的励磁电流分量和转矩电流分量,使控制系统的数学模型变得简单,便于计算[7]。PMSM矢量控制系统的结构框图如图1。

图1 PMSM矢量控制框图
1.2 MTPA控制策略的实现
为使电动拖拉机工作过程中的控制效果更好,本文采用矢量控制中的最大转矩电流比(MTPA)控制策略对PMSM进行控制。要实现MTPA控制,首先需要求解最大转矩电流比轨迹上的id、iq的解析值,将问题转化为求解如下极值问题[8-9]:

对任一给定转矩Te,都可以根据式(6)和式(7)求得对应的最小电流id、iq分量,把此值作为电流环控制的指令值,便可实现PMSM的最大转矩电流比控制。式(6)和(7)均为一元四次方程,直接计算较为复杂,工程实现困难,本文采用查表法,通过提前制作转矩电流对应的表格供处理器查询来实现MTPA控制策略。
查表法具体实现步骤如下:借助MATLAB中的ezploy函数画出id、iq与Te的关系曲线,之后提取曲线中的对应数据关系并对数据进行处理,再将处理后数据导入1-D Lookup Table模块中,从而得到MTPA控制的查找表。将表1电机参数代入式(6)和式(7),并将下列语句输入在MATLAB命令行窗口。
h=ezplot('0.0001.*iq.^4+8.*Te.*0.276/12.*iq-16.*Te.^2/144=0',[-100,100]);
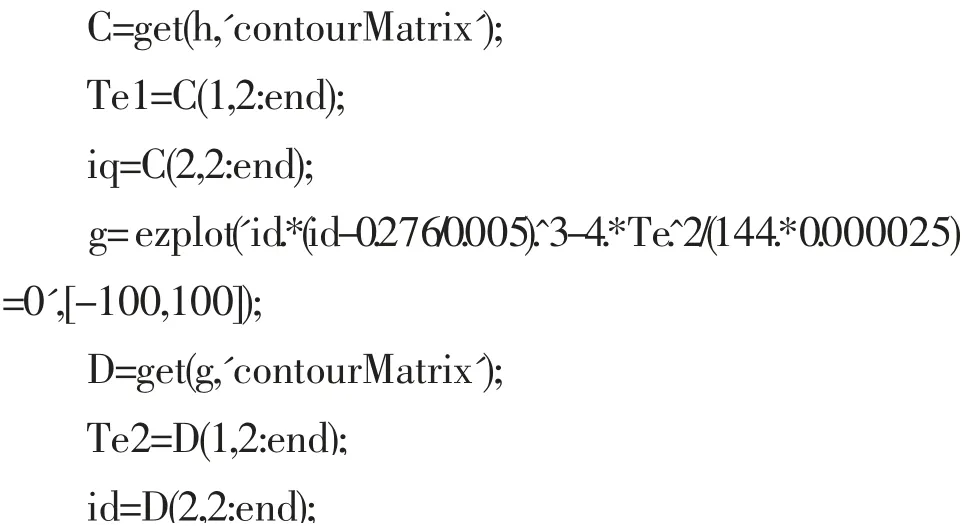
将处理后数据制成一维查找表,如图2。
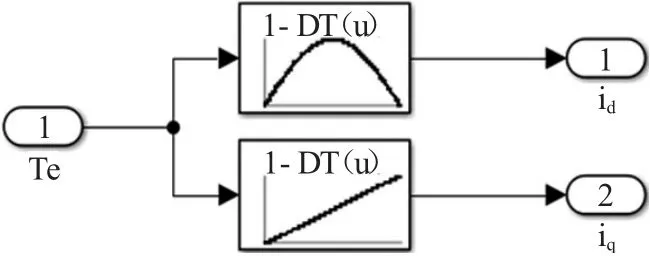
图2 MTPA控制原理实现图
如图3,在Simulink中将上述模块整合在一起就得到基于MTPA控制的PMSM矢量控制系统仿真模型。
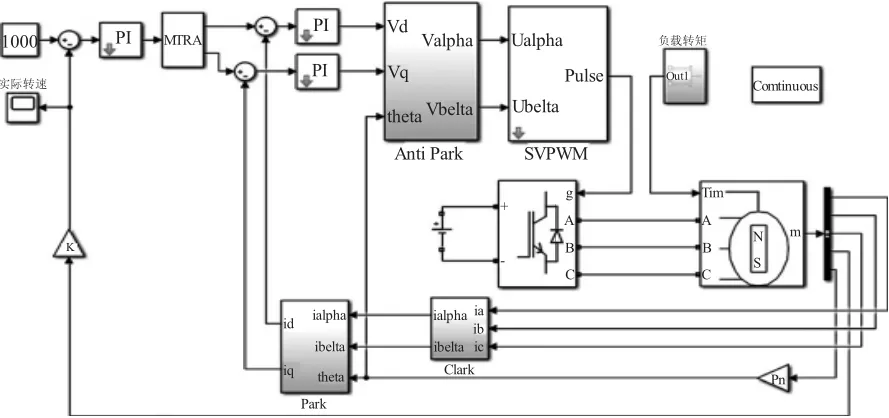
图3 基于MTPA控制的PMSM矢量控制系统仿真模型
2 基于MTPA控制策略的控制系统仿真分析
为探究MTPA控制策略的优越性,与传统矢量控制方法id=0进行了对比。在同等的条件下进行仿真,设置仿真时间为0.5 s,SVPWM采样周期Ts设置为0.00005s,转速指令和负载变化如图4。
基于id=0和MTPA控制策略的永磁同步电机驱动控制系统的转速、转矩及dq轴电流仿真波形如图5、图6。
由图5可以看出两种控制策略均能按给定条件实现速度的快速跟随且均没有稳态误差,由截取的波形图可以看出基于MTPA控制策略的控制系统的电机动态响应更快。

图4 转速指令和负载变化
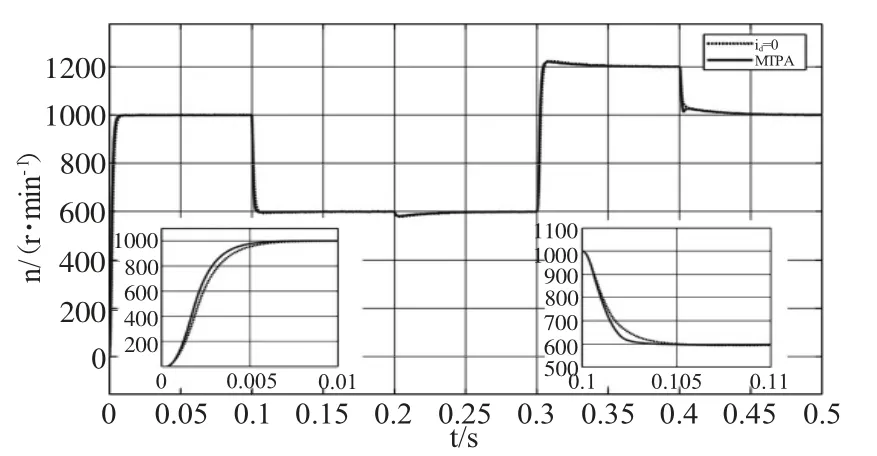
图5 MTPA与id=0控制速度波形
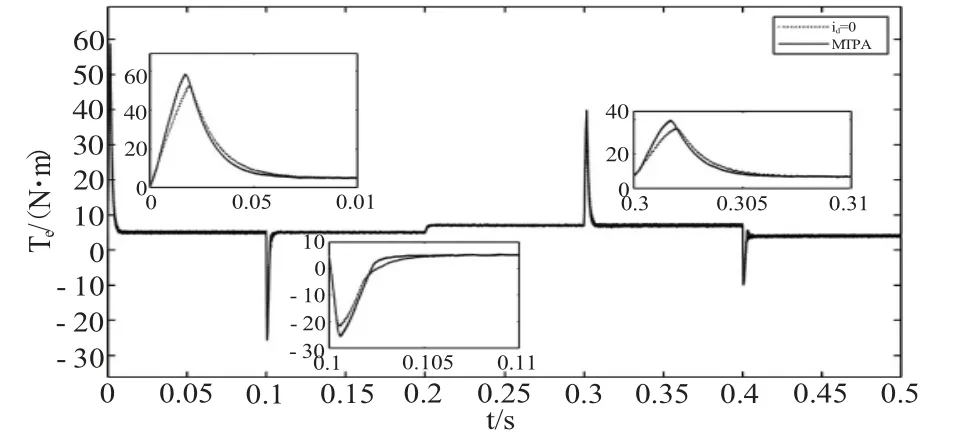
图6 MTPA与id=0控制转矩波形
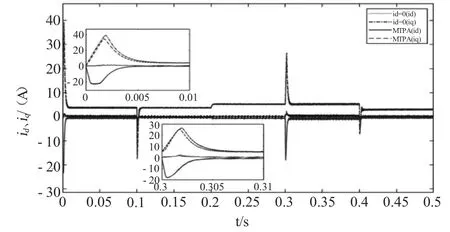
图7 MTPA与id=0控制交、直轴电流波形
由图6可看出在电机起动过程中采用MTPA控制策略的启动转矩比id=0控制启动转矩大,并且在速度变化时MTPA控制策略的输出转矩也更大。由此可知,MTPA控制更适合对输出转矩要求高的场合。
由图7可知,id=0控制在仿真过程中,直轴电流id只在速度和负载指令突变时出现波动,在稳态阶段保持为0,交轴电流始终大于MTPA控制的交轴电流,并且MTPA控制的直轴电流id始终为负值,起到了弱磁作用,使磁阻转矩为正,增大电机输出电机转矩。MTPA控制策略合成电流要小于id=0控制的合成电流,所以在同样的电流限制条件下MTPA控制输出转矩更大,MTPA控制策略的效率更高。
3 控制系统的实际应用
电动拖拉机除了要进行运输作业,还要完成田间作业如犁耕、旋耕、开沟、除草、铺膜、播种等[3,11]。拖拉机在实际作业过程中受到的负载转矩与作业时路面坡度、田间土壤阻力变化、耕种,开沟作业的宽度和深度等多种因素有关,所以电动拖拉机在实际应用中应具有作业负荷能力强,输出转矩大等特点。
为验证所设计电动拖拉机驱动控制系统可以进行不同田间作业,进行了如下仿真分析。电机功率选用10 kW,可应用于小型电动拖拉机的PMSM。为了有效利用MTPA控制,选用内置式PMSM,其为凸极机,存在磁阻转矩,PMSM参数如表1。
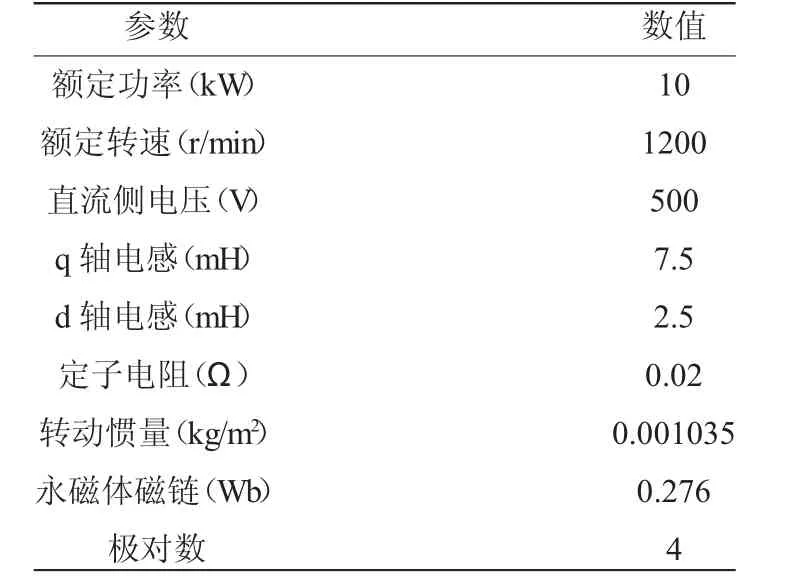
表1 电机参数
对电机加不同负载转矩,观察转速是否可以快速恢复到稳定状态。设置电机启动时的负载转矩为5 N·m,每0.2 s增加10 N·m负载转矩,转速设置为恒定转速1 000 r/mim,总仿真时间设置为1 s,仿真结果如图8。
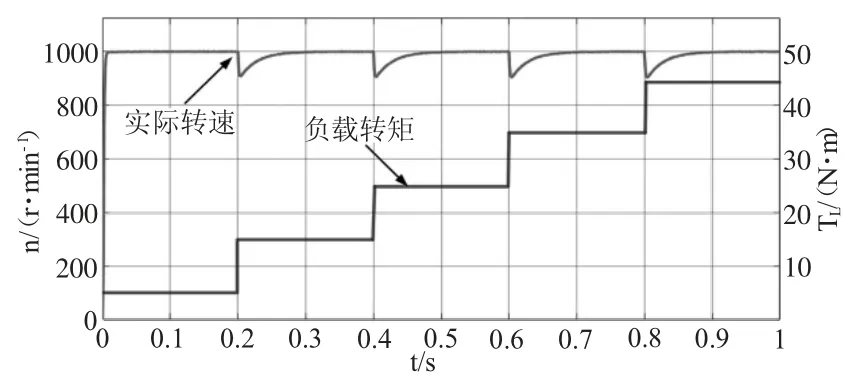
图8 负载转矩对转速的影响
仿真表明:本文设计的基于MTPA控制的电动拖拉机驱动控制系统的电机输出转矩符合动力性能的需求。由仿真图可以看出负载变化时,电机转速可以在很短时间内恢复到稳定运行状态,可以满足多种不同负载要求的作业,并且可以满足负载不断波动的作业要求。
4 总结
相比于id=0矢量控制策略,电动拖拉机驱动控制系统采用MTPA控制策略更合适,其电流分配更合理,充分利用了内置式永磁电机的磁阻转矩,动态响应效果更好,在转矩相同条件下,输出电流更小,可以减小电机损耗,提高系统的效率。仿真实验证明了在各类对电机转矩输出能力有要求的工程应用场合中,MTPA控制比id=0控制有着更大的应用价值,本文所设计的基于10 kW小型电动拖拉机的控制系统可以完成实际应用中多种类型作业。
猜你喜欢
导航定位学报(2022年4期)2022-08-15
舰船科学技术(2022年10期)2022-06-17
飞控与探测(2022年1期)2022-04-02
中学生数理化·高一版(2021年11期)2021-09-05
股市动态分析(2021年16期)2021-08-16
科技信息(2021年7期)2021-02-28
科技创新与应用(2020年15期)2020-05-21
电机与控制学报(2018年9期)2018-05-14
中学生数理化·高二版(2016年3期)2016-12-26
新高考·高一物理(2016年1期)2016-03-05
