
南疆地区防渗渠清淤机器人的设计
2022-03-02 09:44李进韬陈雁忠谢凯静
新疆农机化 2022年1期
赵 辉,李进韬,王 飞,黄 勇,王 鹏,刘 焱,陈雁忠,谢凯静
(新疆工程学院,新疆乌鲁木齐830023)
0 引言
新疆地区特别是在南疆地区拥有我国最长的防渗渠道,但在较长时期内并没有做好渠道的防渗,要想做到节约用水,不仅要重视渠道防渗,提高施工质量,更要提高防渗渠的后期治理和维护,尤其是防渗渠中淤泥和杂物的清理,防止因渠道堵塞造成水资源的浪费。新疆农田属于绿洲农田,四周一般环绕着沙漠与戈壁滩,防渗渠水源多夹杂着大量泥土,导致防渗渠中易出现淤泥堆积,淤泥的堆积会影响整个防渗渠水网水的流畅度,影响防渗渠水网的整体通水能力。渠道清理不干净还会影响农田的灌溉和农作物的生长。若渠道堆积物处理不及时,水渠底部会积累大量的泥沙,随水流动对水泵等设施产生不利影响,在冬季停水期,渠底水流被排干,会使渠道受到的冻害程度加剧,故对防渗渠的清淤和杂物的清理显得尤为重要。
为了实现清淤目的,本文主要做了以下研究。首先,通过采样南疆不同地区的防渗渠的淤泥样本,分析其成分、粘结特性和动力学特性,建立淤泥模型;然后,基于淤泥模型搭建清淤装置试验平台[1-2],寻找清淤装置的最优结构和最佳动力学参数,为最终整机的设计提供理论依据;最后,结合实际工况,建立整机方案,对其多关节机械臂的动力学和运动学进行分析,建立整机的动力学模型,进行机械臂的轨迹规划和优化,寻找最佳的工作路径。对LUDV负荷传感液压系统进行研究,选择合理的传感器并结合逆运动学的反解和轨迹规划建立闭环反馈的电液比例阀驱动控制系统,建立该系统的连续时间状态空间模型和离散时间状态空间模型,结合前期的运动学和动力学模型分别对多关节机械臂装置中2自由度的控制和3自由度的控制进行研究,建立基于模型参考的自适应控制模型,最终建立整机的控制系统,设计研发自动清淤机器人的第一代样机[3]。
1 防渗渠清淤机器人整体设计
1.1 整体结构
本机器人主要包括清淤装置、传感器系统、多关节机械臂装置、引风机、控制系统、软胶履带等部分,清淤装置内设有滚筒刷,并与多关节机械臂装置固定连接,多关节机械臂装置下端设有丝杆滑台,丝杆滑台安装在机器人上,引风机通过支撑架固定在机器人中部,控制系统固定在机器人后部,机器人安装软胶履带更方便于水渠内行走,且不易破坏水渠,较轮胎式、金属履带有一定的优势,机器人装载丝杆滑台,使机械臂在水渠内运行自如,彻底摒弃了传统挖掘机清淤时机械臂在水渠内的操作困难,避免了对水渠造成的破坏,解决了转角位置淤泥难以清理的问题[4]。
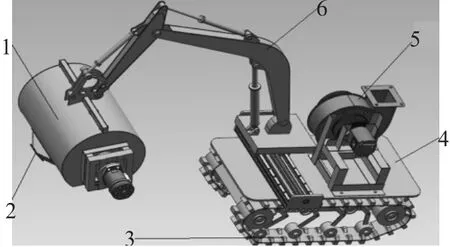
图1 清淤机器人机械系统1.清淤装置2.传感器系统3.软胶履带4.控制系统5.引风机6.多关节机械臂装置
1.2 工作原理
该机器人由控制系统控制在水渠内进行自主清淤,当机器人进入水渠内,控制系统内的GPS定位系统开始工作,规划机器人的运动路线,然后机器人的多关节机械臂装置带动清淤装置开始工作,机器人同步前进,传感器系统中的超声波传感器同时感知与水渠两侧的距离,从而进行避障,避免与水渠的碰撞,清淤装置中的滚筒刷对水渠内的淤泥进行清刷,然后通过引风机将淤泥抽到水渠两侧[5]。
2 关键部件的设计
2.1 清淤装置
清淤装置结构如图2,主要作用是通过传感器系统中的压力传感器、湿度传感器检测淤泥的特性,清淤装置内的滚筒刷对淤泥使用特定速度、力度进行清理,然后通过引风机抽出。清淤装置包括摆线液压马达、摆线液压马达支撑件、滚动轴、保护装置、螺栓和螺母。摆线液压马达与滚动轴固定连接,实现马达带动轴转动的功能,摆线液压马达支撑件与保护装置固定连接,实现固定马达支撑件的作用,摆线液压马达与摆线液压马达支撑件螺栓连接,实现固定马达的作用,使马达在工作时不会出现晃动和摩擦等问题[6]。
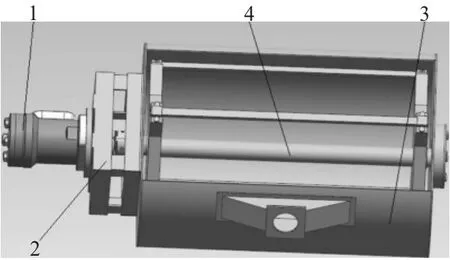
图2 清淤装置结构1.摆线液压马达2.摆线液压马达支撑件3.保护装置4.滚动轴
2.2 多关节机械臂装置
多关节机械臂结构的主要作用是通过调节丝杆滑台的位置以及液压杆的伸缩长度使清淤装置可以到达合适的清淤位置进行清淤工作。常见的多关节机械臂有桁架结构机械臂和液压结构机械臂。由于在本设计中清淤机器人是在现实环境中进行清淤,机械臂具有一定的重量,且要求机械臂可灵活、稳定移动到需要清淤的位置,所以采用液压结构机械臂。这种机械臂通常由液动机、伺服阀、油泵、油箱等部分组成驱动系统,由驱动机械臂的执行机构进行工作,通常具有很大的抓举能力,其特点是结构紧凑,动作平稳,耐冲击,耐振动,防爆性好,可无级变速、定位精度高,可实现任意中间位置的停止,系统的固有振动频率高,压力、容量调节容易,重量小、惯性小,可做到经常快速且无冲击的变速和换向,容易控制,动作平稳,迟滞小。
在本设计中,该多关节机械臂装置通过丝杆滑台实现整体的左右移动,达到机械臂在水渠全方位移动的功能,通过液压杆的伸缩带动活动臂的升降,从而灵活、稳定到达需要清淤的竖直位置。
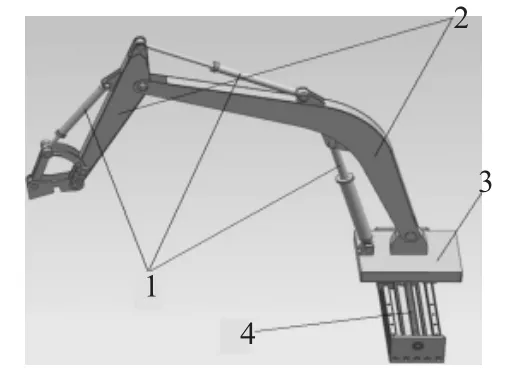
图3 多关节机械臂结构1.液压杆2.活动臂3.底座4.丝杆滑台
3 行走系统结构设计
常见的机器人行走方式有履带式、轮式以及仿生步行式。在光滑的地面上可以采用轮式机器人或行走式机器人,如在日常生活中常见的服务型机器人[7]。在地面环境比较复杂或者需要较强的平稳性要求时,一般会采用履带式机器人。
由于南疆地区水渠内粘稠的淤泥以及水渠底部、侧部都是由水泥堆砌而成,为了防止机器人陷入淤泥中无法行走以及破坏水渠结构,选择软胶履带。软胶履带行走机构可以使机器人在水渠中平稳行走,该机构自适应强、受力面积大、摩擦力大。在履带板的两端设孔,与主动轮啮合,中部有诱导齿,用来规正软胶履带,实现防止机器人转向或侧倾行驶时履带脱落的功能,在与地面接触的一面有加强履带销,用来增强履带板的坚固性和软胶履带与水渠的附着力[8]。
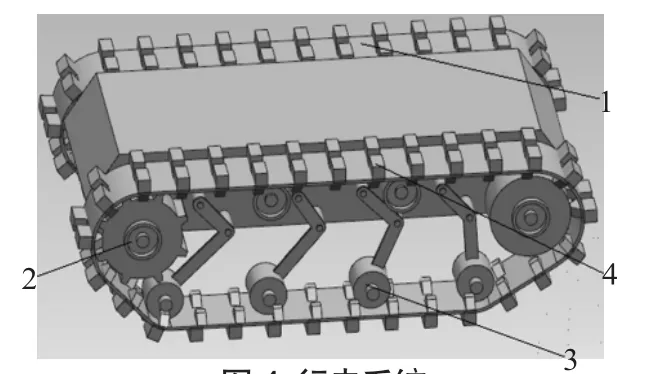
图4 行走系统1.软胶履带2.主动轮3.托带轮4.履带销
4 试验情况
完成该机器人的整体设计后,制作出模型机,将其放入仿真水渠内,仿真水渠内放入适量泥土,模型机开始工作,清淤装置中的滚筒刷对仿真水渠内的淤泥进行清刷,然后通过隔膜泵将淤泥抽到仿真水渠旁的水桶内。
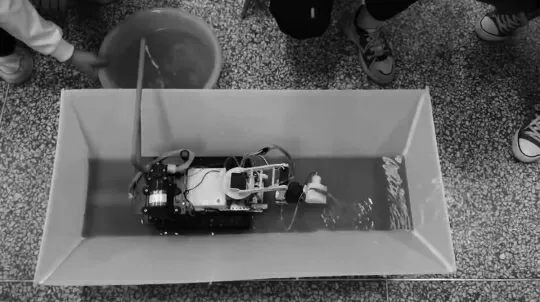
图5 试验过程
5 结论
本文为解决现有的南疆地区防渗渠清淤效率低下的现状设计的一款全自动的防渗渠清淤机器人。该清淤机器人具有以下创新点:
(1)GPS定位系统与超声波传感器结合,使机器人运行更精准。GPS提前规划机器人运行路线,输入至机器人控制系统使机器人按既定线路运行,然后配合超声波实时发送脉波,得到机器人在水渠内精准运行的结果。
(2)滚筒刷与引风机的合理配合使清淤效果更好。通过压力传感器、湿度传感器检测淤泥的特性,滚筒刷对淤泥使用特定速度和力度进行清理,然后及时通过引风机抽出。
(3)软胶履带的设计使机器人可在行走自如的前提下保护水渠不被破坏。软胶履带自适应强、受力面积大、摩擦力大材质柔软,可以使机器人在水渠中平稳行走,达到保护水渠不被破坏的效果。
6 展望
因为时间精力有限,本文虽然完成了预期的大部分工作,但在很多方面仍然存在有待完善的地方,后续还可以进行以下几个方面的工作:
(1)结构设计方面,本文研究的防渗渠清淤机器人只是用于功能演示,属于模拟原理样机,结构设计上进行了许多简化且不作过多要求,如多关节机械臂装置连接部分采用舵机连接,电路控制器没有进行很好的防水措施,故后续在这些地方的结构设计上可以进行改进。
(2)测试试验方面,由于本文中防渗渠清淤机器人的结构设计与控制系统均在很多地方进行了简化,而且只是原理性功能演示,所以在测试试验方面也只是验证相关设计的底层硬件是否能够实现预期动作,如清淤功能演示时只需验证滚筒刷是否正常转动以及隔膜泵是否可将淤泥抽出等,故对于实际应用的南疆地区水渠清淤机器人而言,则可加入相关的清淤试验,以便能够用于实际的清淤作业。
猜你喜欢
珠江水运(2022年7期)2022-05-12
建材发展导向(2022年6期)2022-04-18
专用汽车(2022年2期)2022-04-05
建材发展导向(2021年19期)2021-12-06
作文新天地(小学版)(2021年2期)2021-02-28
创新作文(1-2年级)(2017年11期)2018-04-17
小雪花·成长指南(2015年3期)2015-05-04
城市建设理论研究(2011年23期)2011-12-20
坦克装甲车辆(2000年6期)2000-06-13
