计及电网频率波动敏感特性的双馈风电机组优化发电控制策略
2022-02-25 14:06:14田昕,蔡旭,贾锋
电源学报 2022年1期
田 昕,蔡 旭,贾 锋
(上海交通大学电子信息与电气工程学院,上海 201100)
风能作为当今社会最具经济价值的绿色能源之一,已得到了世界各国的普遍关注和大力发展。一方面,根据国家发展和改革委员会要求,风电2020 年要实现与煤电平价上网的目标,因此降低机组度电成本十分紧要,关乎风电产业在当前能源结构中的竞争力。对于已投运的机组,提高发电量是降低度电成本最有效的方法之一。另一方面,自然风具有随机波动特性,造成风电功率波动,大规模风电并网对电网安全稳定运行和调峰产生较大压力,因此在大型风电机组控制策略的研究中,不应忽视策略带来的机组功率波动问题[1-2],尤其在电网调频的敏感频段。综上,提高机组发电量和限制机组功率波动均是风电机组的重要控制目标。然而在不外接储能装置的情况下,平滑机组功率只能从源动力端对风力机捕获的风功率进行削峰控制,即降功率运行,这会造成发电量损失。因此提高机组发电量和限制机组功率波动是具有矛盾性的目标。
大多数MW 级变速风电机组采用最优转矩控制,因为其控制结构简单,可以在稳态时有效实现最大功率点跟踪MPPT(maximum power point tracking)控制,但由于转动惯量巨大,造成动态过程中转速无法有效跟踪风速[3-5]。现有机组控制研究大多集中于单一目标开展,许多研究在最优转矩控制的基础上改进,以提高机组转速对变化风速的动态跟踪速度,但忽略了对机组功率波动造成的不利影响[6-11]。文献[12]在最优转矩控制策略基础上,提出一种带低通滤波器的最优转矩控制,验证了控制策略的功率平滑能力,但忽略了损失电量的不利影响。
基于以上讨论,本文提出一种兼顾提高发电量和限制功率波动目标的机组优化控制方法。首先建立风电机组转子运动学方程,结合风力机气动模型和风力发电机控制原理,建立小信号分析模型对控制策略性能进行对比分析。然后结合自然风能量频谱特征及电网调频特点,进行控制参数选择。最后,通过仿真和实验验证理论分析的正确性,以及所提方法在协调优化提高机组发电量和限制功率波动目标方面的有效性。
1 机组常规控制
1.1 系统结构
图1 为采用的双馈风力发电系统在常规最优转矩控制下的结构框图[13-15]。机组由风力机、双馈风力发电机、转子侧整流器、网侧逆变器、直流母线电容和滤波器等组成。
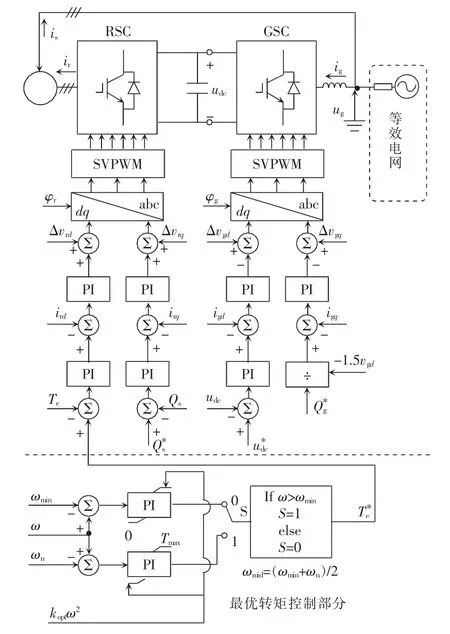
图1 双馈风力发电系统控制框图Fig.1 Control block diagram of DFIG system
1.2 最优转矩控制
根据风力机空气动力学理论,风力机从风能中捕获的机械功率为

式中:Pa为风力机捕获的机械功率;ρ 为空气密度;R 为风轮半径;v 为风力机有效风速;Cp为风能利用系数,可表示为风力机桨距角β 和叶尖速比λ 的二元函数;叶尖速比λ=ωrR/v,其中ωr为风轮转速。
在桨距角β 固定为0°时,风能利用系数Cp随叶尖速比λ 先增大后减小,在叶尖速比λ=λopt时,Cp值最大,风力机获得最大的气动功率。λopt对应的风力机转速为最佳转速ωopt,ωopt=λoptv/R,将此式代入式(1),消去风速,得

利用式(3)作为电磁转矩给定进行控制,即为最优转矩控制。文献[16]对最优转矩控制的稳定性作出了证明。最优转矩控制在MW 级变速风电机组中广泛应用。
1.3 控制性能分析
将风力发电系统看做一个整体,风速是最重要的外部输入。风速到转速的传递函数可用来描述机组转速对风速变化的跟踪能力,风速到输出功率的传递函数可用来描述由风速变化造成的机组发电功率波动。文献[17]指出,使用单质量块传动链模型进行所提控制目标分析是合理有效的。
将模型进行标幺化。取机组额定功率Pn作为机组基准功率PB,发电机同步转速除以齿轮箱变比作为风力机基准转速ωB,则机组运动方程可列为

式中:Jsum为标幺化的集总质量块转动惯量,Jsum=JWT/,其中JWT和JG分别为风轮机和发电机的转动惯量,ngb为齿轮箱变速比;Ta、Te分别为标幺化的气动转矩和电磁转矩。在工作点(v0,ω0,β0)附近进行线性化处理,v0、ω0和β0分别为工作点的风速、转速和桨距角,则有

式中:ΔPa为气动功率变化量;ΔPe为电磁功率变化量;Δω 为转速变化量。
考虑到机组稳定工作点为Cp曲线顶点,由式(1)可得

式中:Cp0为工作点处对应的风能利用系数;Δv 为风速变化量。
在变流器控制下,发电机转矩响应十分迅速,相对于风力机的气动动态过程,发电机转矩响应时间可以忽略。因此在最优转矩控制下可得

结合式(5)、式(6)和式(8),可得风速到转速的传递函数为

MW 级机组转动惯量极大,即Jsum很大,因此式(9)的时间常数大,转速对风速的跟踪能力受负面影响。
结合式(8)、式(9),可得风速到功率的传递函数为

式(10)传递函数同样呈现一阶低通滤波器特性,MW 级机组的大惯量也造成此传递函数时间常数较大,其影响体现为最优转矩控制下的机组对高频风速波动具有较好的滤波效果,机组功率波动较小。
2 改进的转矩控制
2.1 对风速分频的考虑
van de Hoven 自然风能量频谱如图2 所示,根据典型的van de Hoven 自然风能量频谱[18],风速波动超过0.5 Hz 的部分所含能量极少,这为提出兼顾提高机组发电量和限制功率波动目标的控制方法提供了如下思路:降低机组对所含能量极少但波动极大的高频风的幅频响应,仅提高机组对蕴含能量丰富的中低频风的幅频响应,可以最大程度同时优化两目标。
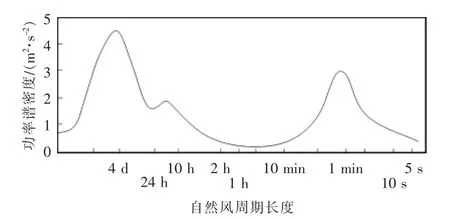
图2 van de Hoven 自然风能量频谱Fig.2 van de Hoven natural wind energy spectrum
同时,考虑到系统参与一次调频的响应时间一般为2~15 s,因此系统调频对剧烈的频率波动不能及时响应。综合考虑电网调频特点,电网迫切需要风电机组参与功率平滑的频段为0.05~1.00 Hz。结合自然风的频谱特征,界定风电机组对提高发电量重点关注频段为0~0.05 Hz,对功率波动重点关注频段为0.05~0.50 Hz。
2.2 带滤波器的改进转矩控制
带滤波器的改进转矩控制结构如图3 所示,将图1 中的最优转矩控制部分替换为图3 所示的控制结构。图3 中,G(s)为低通滤波器。本文采用最简单一阶低通滤波器进行分析,则其传递函数和电磁转矩分别为
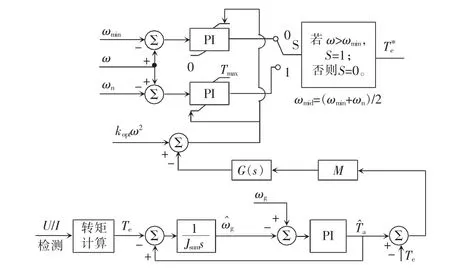
图3 带滤波器的改进转矩控制Fig.3 Improved torque control with filter

式中:M 为转矩附加值的比例系数;T 为滤波器时间常数;为气动转矩估计值。M、T 的参数选择应整体考虑,以使控制策略满足总体设计目标。为提高机组动态跟踪能力,M 理论取值范围为(0,1];同时,为避免机组功率波动过大,M 不宜大于1/2,根据本文所选机组容量,将M 设定为1/3。T 的选取原则为引入滤波器后控制系统仍能够增强对中低频风的动态跟踪能力,同时实现对高频风段功率波动的平滑,须结合功率传递函数和机组参数进行选取,当T=0 时,相当于无滤波器引入。在工作点处线性化处理得
结合式(5)、式(6)和式(13),得到转速的传递函数为

式(14)所示的转速传递函数为具有零点的二阶系统形式,使用赫尔维茨稳定判据,可知此控制方法具有稳定性。该传递函数的一对零极点距离很近,作用相抵消,因此传递函数特性和一阶低通滤波器相似。绘制转速传递函数幅频响应Bode 图,并与最优转矩控制及不带滤波器的改进转矩控制对比,如图4 所示。
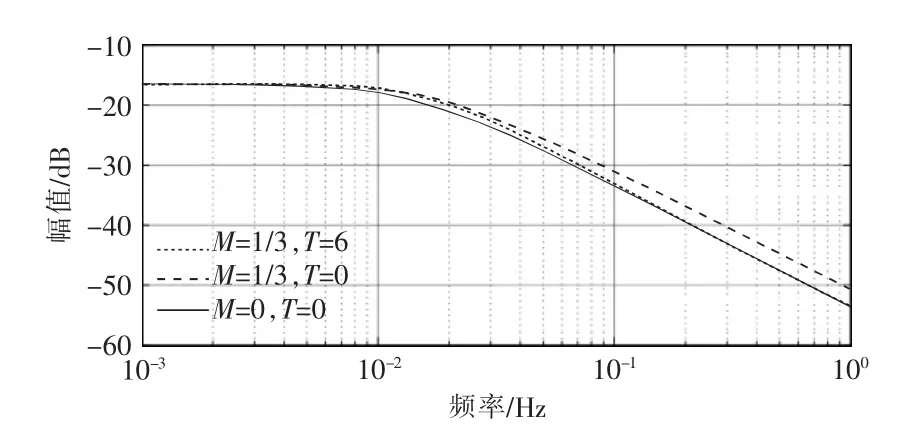
图4 不同转矩控制方法下式(14)的幅频特性Fig.4 Amplitude-frequency response of formula no.14 under different control methods
由Bode 图可以看出:相比于最优转矩控制(M=0,T=0),带滤波器的改进转矩控制提高了机组对中低频风的动态跟踪能力,对高频风的动态跟踪性能基本相同;相比于无滤波器的改进转矩控制(M=1/3,T=0),带滤波器的改进转矩控制策略(M=1/3,T=6)对中低频风的动态跟踪性能与其相似,而对高频风的响应要低。
按同样的方法在工作点处进行小信号分析,得到从风速到功率的传递函数为
式(15)的传递函数形式为带零点的二阶系统,通过合适的参数设计,可抵消传递函数零点造成的不利影响,实现对高频段幅频响应的校正。结合机组参数,在工作点处分析T 应大于2.7,为使滤波器能在整个工作区间的性能满足设计目标,最终选取的滤波器时间参数T 为6。绘制功率传递函数的Bode 图,并进行对比,如图5 所示。
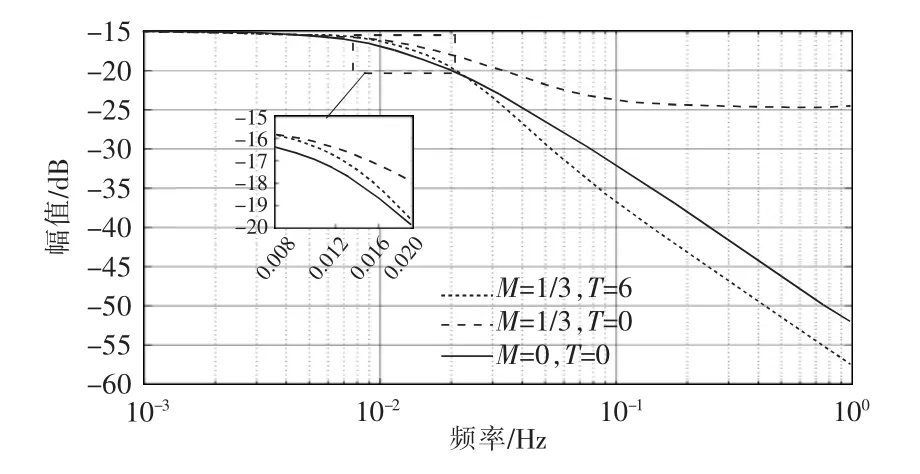
图5 不同转矩控制方法下式(15)的幅频特性Fig.5 Amplitude-frequency response of formula no.15 under different control methods
由Bode 图可看出,相比于最优转矩控制,带滤波器的改进转矩控制策略(T=6)提高了对中低频风的幅频响应;相比于无滤波器的控制策略,实现了对高频风幅频响应的校正。
2.3 滤波器的参数选择
以本文所选机组参数为例,绘制M=1/3 及T 分别为3、6 和12 时机组在工作点处的转速和功率传递函数的Bode 图,如图6 和图7 所示。
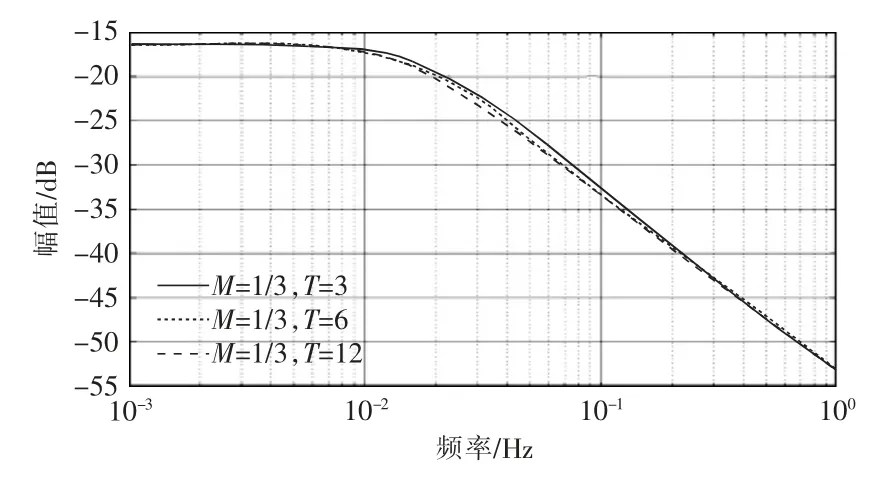
图6 不同滤波器参数下式(14)的幅频特性Fig.6 Amplitude-frequency response of formula no.14 under different filter parameters
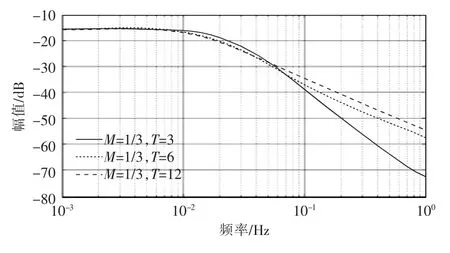
图7 不同滤波器参数下式(15)的幅频特性Fig.7 Amplitude-frequency response of formula no.15 under different filter parameters
由图6 可以看出,随着滤波器时间常数减小,机组转速的幅频响应在中频段升高,这一过程随时间常数单调变化。由图7 可以看出,随着滤波器时间常数减小,功率的幅频响应在中频段升高,却在高频段减小。这是由于T=3 时,功率传递函数的零点距离2 个极点位置较远,系统近似二阶低通滤波环节,而T=6 和T=12 时系统在中高频段之后均近似于一阶低通滤波环节。这使得系统在T=3 时对中频风功率幅频响应更大,在高频段幅频响应更小,符合设计目标。值得注意的是,选取T 的下限值应保证功率传递函数的零点位于虚轴左侧。
3 实验与仿真验证
3.1 硬件在环半实物联合实验仿真平台
分析结果在GH Bladed 和实时数字仿真器RTDS(real time digital simulator)硬件在环联合实验仿真平台上进行验证[19],其验证平台如图8 所示。GH Bladed 是用于风机设计的专业仿真分析工具,RTDS 是一个可以展示详细电磁暂态过程的实时仿真工具,外部实际DSP 控制器通过RTDS 提供的A/D 和D/A 转换板卡接入仿真回路中,利用实际的DSP 硬件控制器控制RTDS 中搭建的双馈风机电气模型。另外采用2 个PLC 分别用来实现通信功能和作为机组主控制器。系统各部分之间采用ADS通信方式。
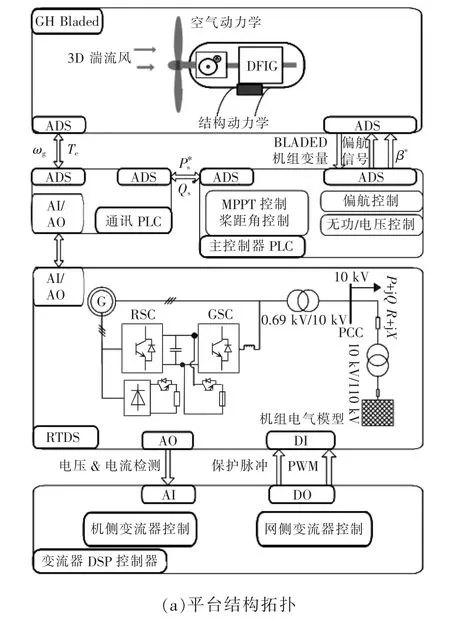
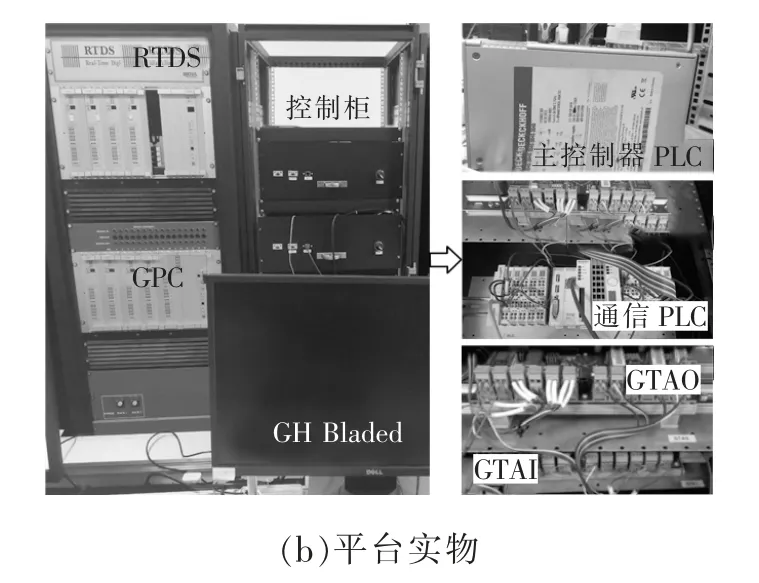
图8 本文验证平台Fig.8 Verification platform proposed in this paper
3.2 实验与仿真验证
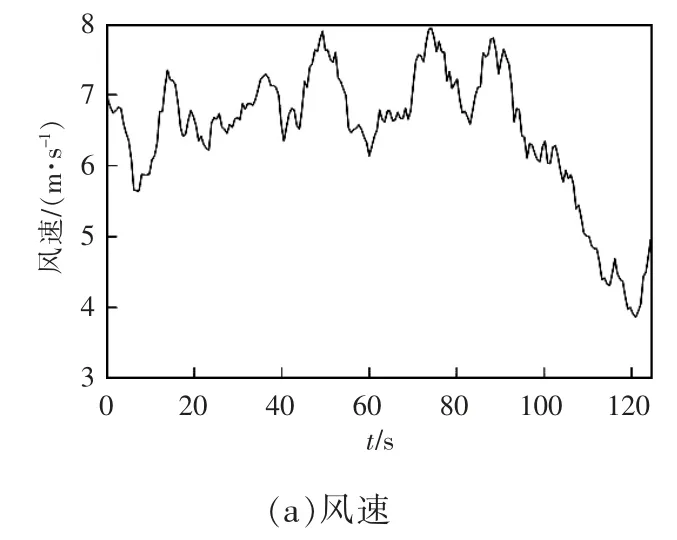
1.5 MW 风力发电机组参数如表1 所示。用GH Bladed 生成了符合IEC 标准的平均风速为6 m/s 的3D 湍流风作为机组输入,湍流风纵向、横向及垂直湍流强度参数分别为25.02%、19.61%、13.95%,联合实验仿真结果如图9 所示。
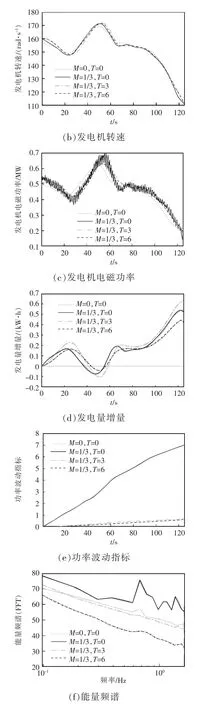
图9 联合实验仿真结果Fig.9 Simulation results of co-experiment
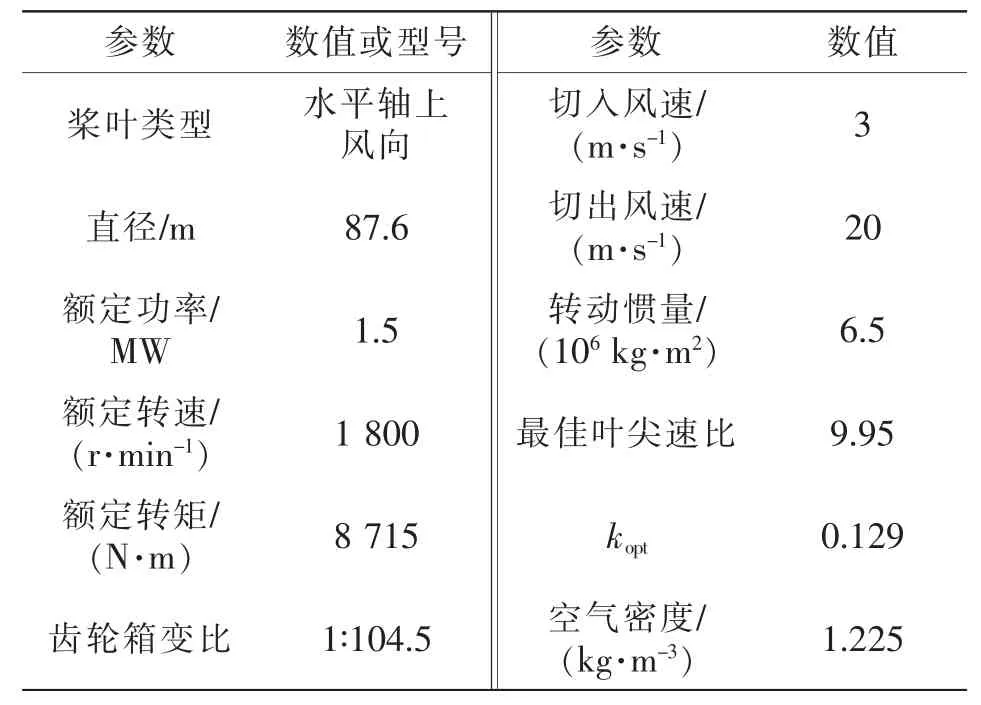
表1 1.5 MW 风力发电机组参数Tab.1 Parameters of 1.5 MW wind turbine
对机组输出的电磁功率数据进行积分可以得到机组的发电量,可用来比较不同控制算法下发电量情况。
定义功率波动指标PFI(power fluctuating index),用来描述机组输出功率的波动程度,表示为

图9 中,M=1/3,T=3、6 代表带滤波器的改进转矩控制。由图9(d)可知,相比于最优转矩控制,无滤波器的改进转矩控制和带滤波器的改进转矩控制均提高了机组发电量。由图9(e)可知,无滤波器的改进转矩控制造成了大幅度的功率波动,这与所提出的控制目标不相符合。在M=1/3,T 分别为0、3、6 这3 种不同参数设置下的改进转矩控制,相对于常规最优转矩控制(M=0,T=0),其发电量分别提升了0.524、0.626、0.421 kW·h,百分比分别提升3.33%、3.98%、2.67%。无滤波器的改进转矩控制方法的功率波动指标远大于其余3 种方法,而带滤波器的改进转矩控制策略下的功率波动指标基本和常规最优转矩控制方法相同。实验结果和理论分析基本一致。
值得注意的是,滤波器时间常数为3 时改进转矩控制策略的机组发电量略高于无滤波器改进转矩控制。这是由于无滤波器改进转矩控制下的输出功率对全频段的风功率波动均快速响应,而高频风波动中含有的能量极少,因此这种过快响应反而会造成MPPT 控制的无效跟踪。
图9(f)为4 种控制策略下输出功率在电网敏感频段的能量频谱分析结果,发现无滤波器改进转矩控制方法在该高频段的能量远高于其余3 种方法,而带滤波器的改进转矩控制方法不同程度降低了机组输出功率在该高频段的能量。
以上结果符合前文机理分析,带滤波器的改进转矩控制对中低频风具有更高的幅频响应,对高频风具有较低的幅频响应。由于中低频风中蕴含绝大部分风能,高频风能量极少但波动快,通过加强对高能量中低频风的跟踪能力提高了发电量,通过降低对低能量高频风的响应抑制了机组在电网敏感频段的功率波动,最终实现了提高机组发电量和限制机组功率波动目标的协调优化。
4 结论
针对风电机组控制中存在的提高发电量和限制功率波动目标之间的矛盾性问题,本文提出一种带滤波器的改进转矩控制策略。建立了多种控制方法下的机组小信号分析模型,对比研究了所提控制方法的控制性能。具体结论如下。
(1)考虑自然风频谱特征和电网调频敏感频段,基于风速分频思想设计机组转矩控制策略,是实现协调优化提高发电量和限制功率波动目标的有效方法。自然风中大部分风能蕴含于中低频风波动中,通过加强对高能量中低频风的跟踪,降低机组对低能量高频风波动的响应,可以最大程度地综合优化两目标。
(2)尽管理论上采用不带滤波器的改进转矩控制的机组应该具有最高的发电量,但实际上由于该方法对全频段风波动均响应,而高频风中蕴含能量极少,反而会造成MPPT 的无效跟踪,造成输出功率波动很大。
(3)控制方法的参数选择对于控制结果有影响,应结合具体机组参数进行机理分析,合理选择适当参数,以实现机组提高发电量目标与限制功率波动目标的综合最优。
猜你喜欢
矿山安全信息(2022年34期)2022-04-07 10:22:51
地震研究(2021年1期)2021-04-13 01:04:56
中国煤炭(2020年2期)2020-01-21 02:49:28
测控技术(2018年7期)2018-12-09 08:58:46
水电站设计(2018年3期)2018-03-26 03:52:32
光学精密工程(2016年4期)2016-11-07 09:05:39
电站辅机(2016年4期)2016-05-17 03:52:38
CHIP新电脑(2016年3期)2016-03-10 14:07:52
中国新通信(2015年1期)2015-05-30 10:30:46
电测与仪表(2014年11期)2014-04-04 09:21:20