一种基于颜色编码滤波的同时偏振成像方法
2022-02-24 00:33任立勇
陕西师范大学学报(自然科学版) 2022年1期
梁 健,任立勇
(陕西师范大学 物理学与信息技术学院,陕西 西安 710119;西安市光信息调控与增强技术重点实验室,陕西 西安 710119)
偏振作为光波4个基本属性之一,携带了丰富而独特的信息。目标反射和辐射光的偏振特性与目标的属性、材质和表面粗糙度等因素密切相关,因此偏振光学成像技术可以用来获取和分析目标特性,成为热点研究领域。目前,偏振光学成像技术已被证明具有很多广泛的应用前景,例如:伪装目标探测[1-2]、目标识别[3-4]、去散射成像[5-8]、导航[9]、医学诊断[10-11]和生物成像等。
常规的偏振成像方法基于斯托克斯矢量(Stokes vector)偏振成像计算模型,通常需要至少3幅同一场景不同偏振态的图像来计算该场景的线偏振信息,至少4幅图像来计算全偏振信息[12]。因此,偏振成像系统的设计和实现通常比较复杂。最初,通过在相机镜头前旋转偏振片的方法实现了简单的分时偏振成像系统。该系统的最大缺陷是牺牲了成像系统的时间分辨率,无法适用于对动态目标进行偏振成像。此后,多种同时偏振成像系统被相继提出,例如:分振幅偏振成像系统[13-14]、分孔径偏振成像系统[15-16]以及分焦平面偏振成像系统[17]。其中,分振幅和分孔径偏振成像系统通常需要复杂的光学设计将入射光分成3份或4份,然后成像在不同探测器或同一探测器的不同位置。这直接导致这两类同时偏振成像系统设计较复杂、体积庞大,难以进行高精度偏振定标和图像像素级配准。分焦平面偏振成像系统则是利用在探测器像元前放置与之对应的微偏振片阵列实现同时偏振成像功能。该类型的偏振成像系统结构紧凑、体积小,克服了前两类偏振成像系统的主要缺陷。但是,目前的该类型成像系统尚不能计算圆偏振成分,并且微偏振片阵列的探测精度比较差[18]。
本文提出了一种新型的基于颜色编码滤波的同时偏振成像方法。首先,将特殊设计的偏振颜色滤波片放置在成像镜头的孔径光阑处,该偏振颜色滤波片包含3个颜色通道,每一个颜色通道对应一种偏振信息。其次,利用普通彩色相机和装有偏振颜色滤波片的成像镜头对目标场景成像。经过3个颜色通道调制的入射光在像面上非相干叠加,同时在整个光学探测器上成像,最后,利用彩色相机拜尔滤镜特性,利用红绿蓝(RGB)三通道的图像解算得到偏振图像,最终实现同时偏振成像功能。需要注意的是,相机空间分辨率主要由像素分辨率和镜头分辨率两部分决定,本设计可完全消除传统偏振成像系统带来的像素分辨率损失,但由于采用颜色分光,会导致镜头分辨率有所降低。镜头分辨率可根据成像镜头和探测器像元尺寸参数匹配来进一步优化消除,因此本文忽略了镜头分辨率损失,认为像素分辨率即相机的空间分辨率。该方法得到的偏振图像可以保留相机原始的空间分辨率和时间分辨率,同时,该方法有助于大幅简化偏振成像系统的光学设计复杂性,有利于偏振相机的小型化和集成化。
1 颜色编码滤波偏振成像方法理论
本文提出的同时偏振成像方法的核心元件是偏振颜色滤波片[19],其结构示意图如图1所示。偏振颜色滤波片由两部分组成,分别是颜色滤波片和偏振片。每个部分又等分为3片,颜色滤波片分为红色、绿色和蓝色,偏振片分为0°、60°和120°。颜色滤波片和偏振片一一对应,即红色滤波片调制0°偏振光,绿色滤波片调制60°偏振光,蓝色滤波片调制120°偏振光。

图1 偏振颜色滤波片结构示意图Fig.1 Diagram of our proposed distributedcolor-polarizer filter
孔径光阑的特性在于该光阑只改变进入成像系统的入射光束的立体角,而不影响视场。通常,孔径光阑被用来控制成像系统的进光量,即普通成像系统中的光圈。本文提出的方法主要利用孔径光阑的特点来构建偏振调制通道,偏振成像系统的光路示意图如图2所示。将偏振颜色滤波片放置在成像镜头的孔径光阑位置处,经过孔径光阑的任意光束均携带了图像的全部信息,因此对经过孔径光阑的部分光束进行偏振调制实际上可以影响整个图像的偏振态。如图2所示,偏振颜色滤波片可分为3个通道,即入射光束被三等分,并分别被不同偏振方向的偏振片调制,因此探测器上接收到的信息是三通道被调制的偏振图像的非相干叠加。通过彩色探测器拜尔滤镜后,分别成像为红、绿、蓝3幅图像。下一步,通过颜色滤波片的颜色编码特性,结合彩色相机的红、绿、蓝3幅图像,解算出对应颜色滤波片的偏振图像。

图2 提出的偏振成像方法的光路示意图Fig.2 Schematic diagram of the proposedpolarimetric imaging method
如图2所示,将三等分的偏振片编号为1、2和3,分别对应偏振方向0°、60°和120°。通过偏振颜色滤波片后,三通道入射光分别可表示为
(1)
(2)
(3)

(4)
(5)
(6)
对于偏振成像应用而言,通常不考虑光波长对目标偏振态的影响[20-21]。因此,这里假设红绿蓝三通道的目标反射光偏振态一致。这里,由于彩色相机拜尔滤镜绿色通道数是红蓝通道数的两倍,因此绿色通道的图像噪声要低于红蓝通道图像,更适合用来进行偏振图像分离。式(4)—(6)可表示为矩阵形式
(7)
其中:γ1和γ2分别表示IR和IG、IB和IG的强度透射比。γ1和γ2主要由入射光的不同光谱成分决定,同时也受到各个颜色通道入射光偏振态的影响。因此,γ1和γ2决定了该方法的偏振成像探测精度。在定性化的偏振探测应用中,可忽略各颜色通道入射光偏振态对γ1和γ2的影响,认为γ1和γ2分别是红绿通道和蓝绿通道的强度比值。在定量化的偏振测量应用中,对γ1和γ2的精度要求较高。此时,需要建立一个严格的定标体系,建立γ1和γ2测量值与真实值的对应关系,精确获得γ1和γ2值。本文主要利用定性化偏振探测应用来证明该方法的可行性,对定量化偏振探测应用中的γ1和γ2值定标体系会继续进行深入研究。
利用式(7),可以解算出IG(0)、IG(60)、IG(120)3幅偏振图像。进而,根据3幅偏振图像,获得该场景反射光的Stokes矢量
(8)
2 实验结果
2.1 线偏振片成像实验结果
为了证明本文提出的偏振成像方法的可行性,设计并制作了多角度线偏振片作为探测目标。该偏振片共有8个不同的偏振方向,如图3所示。图3a为制作的多角度线偏振片实物图,图3b为偏振片的线偏振方向示意图。利用本文提出的同时偏振成像方法对该线偏振片成像,直接拍摄图如图3c所示。从图3c中可以看出,由于颜色滤波的作用,不同偏振方向线偏振片图像的颜色有明显区别。将图3c所示直接拍摄图像的红绿蓝通道分离出来,利用式(7)进行计算,可以得到0°、60°和120°的偏振图像。根据图3c计算得到的绿色通道偏振图像如图4所示,图4a—c分别表示0°、60°和120°的偏振图像。从图4中可以看出, 不同偏振方向的偏振片在对应偏振图像中呈现出明暗变化。图4所示的背景光源是积分球发出的均匀非偏振白光,从图中可以看出,非偏振光在不同的偏振图像中响应略有不同,这可能是由偏振颜色滤波片的透射率误差所导致。

图3 多角度偏振片实物图(a)、偏振片的偏振方向示意图(b)及偏振成像直接拍摄图(c)Fig.3 Image of the specifically designed multipolarizer(a),polarization direction of each part(b) andthe directly captured image of the polarizer(c)
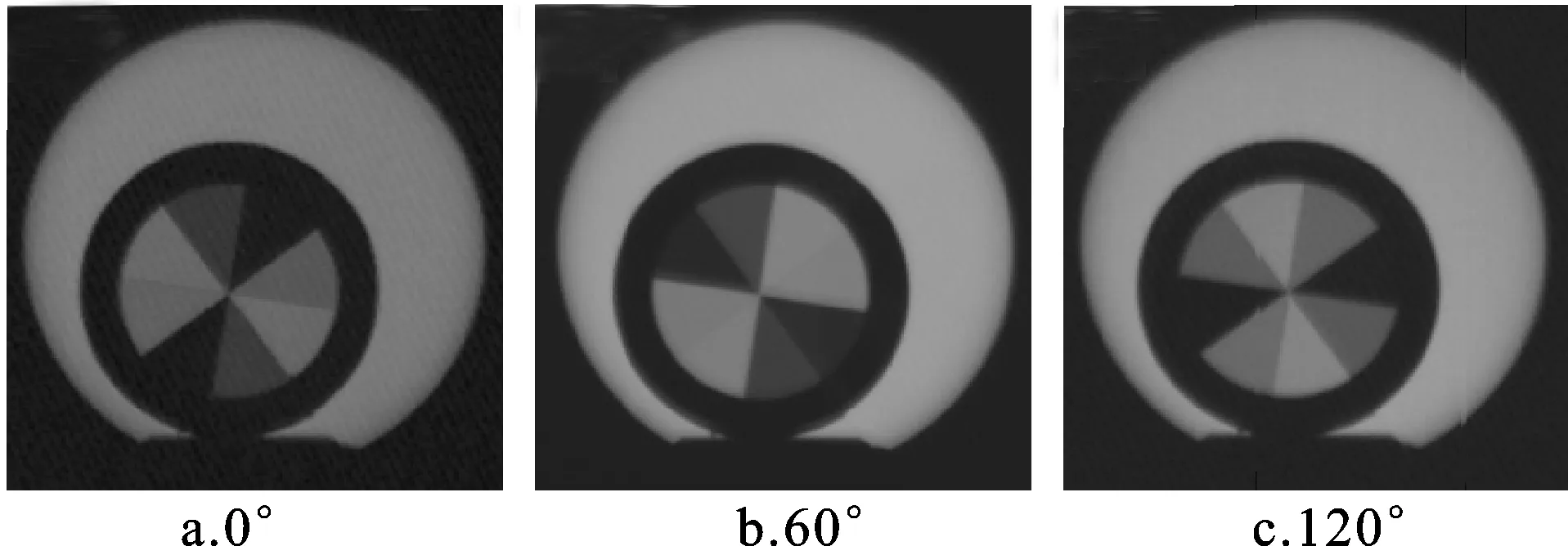
图4 计算得到的绿色通道的偏振图像Fig.4 The calculated polarized images of G channel
分时偏振成像方法虽然牺牲了时间分辨率,但是其偏振探测精度非常高。利用图4所示的偏振图像计算偏振度和偏振角图像,并与分时偏振成像方法得到的偏振度和偏振角图进行对比,结果如图5和图6所示。图5a所示为分时偏振成像方法计算得到的偏振度图,图5b为本文提出的方法计算得到的偏振度图。从对比可以看出,两种方法计算得到的偏振度值都很高,与偏振片的特性一致。图5b的背景偏振度比图5a略高,这是由图4所示的背景强度差异导致的。因为分时偏振成像方法得到的结果精度很高,因此可以将图5a认为是真实值,计算图5b的偏振度误差。8个不同偏振方向的偏振片得到的偏振度结果略有差异,其中最大误差为9.7%,平均误差为3.9%。该误差结果说明本文提出的同时偏振成像方法具有较高的偏振探测精度,优于96%。因此,该方法适用于很多领域,例如:去散射成像、目标探测和缺陷检测等。但是,从图5b中可以看出,在偏振度较低的区域,偏振度图出现了一些噪声,这可能是由于偏振颜色滤波片在孔径光阑位置分光后导致入射光能量减少,可通过提高入射光能量使噪声减弱或消除。

图5 偏振度图像对比Fig.5 Comparing of the degree of polarization
图6a所示为分时偏振成像方法计算得到的偏振角图,图6b所示为本文提出的方法计算得到的偏振角图。对比可以看出,两幅偏振角图展现多角度线偏振片的偏振角信息一致。将图6a作为标准偏振角图,计算图6b的偏振角误差。在8个偏振方向中,偏振角最大误差为6.2°,平均误差为3.0°。图5和图6所示的对比结果表明,本文提出的同时偏振成像方法具有较高的偏振探测精度,证明了该方法的可行性。
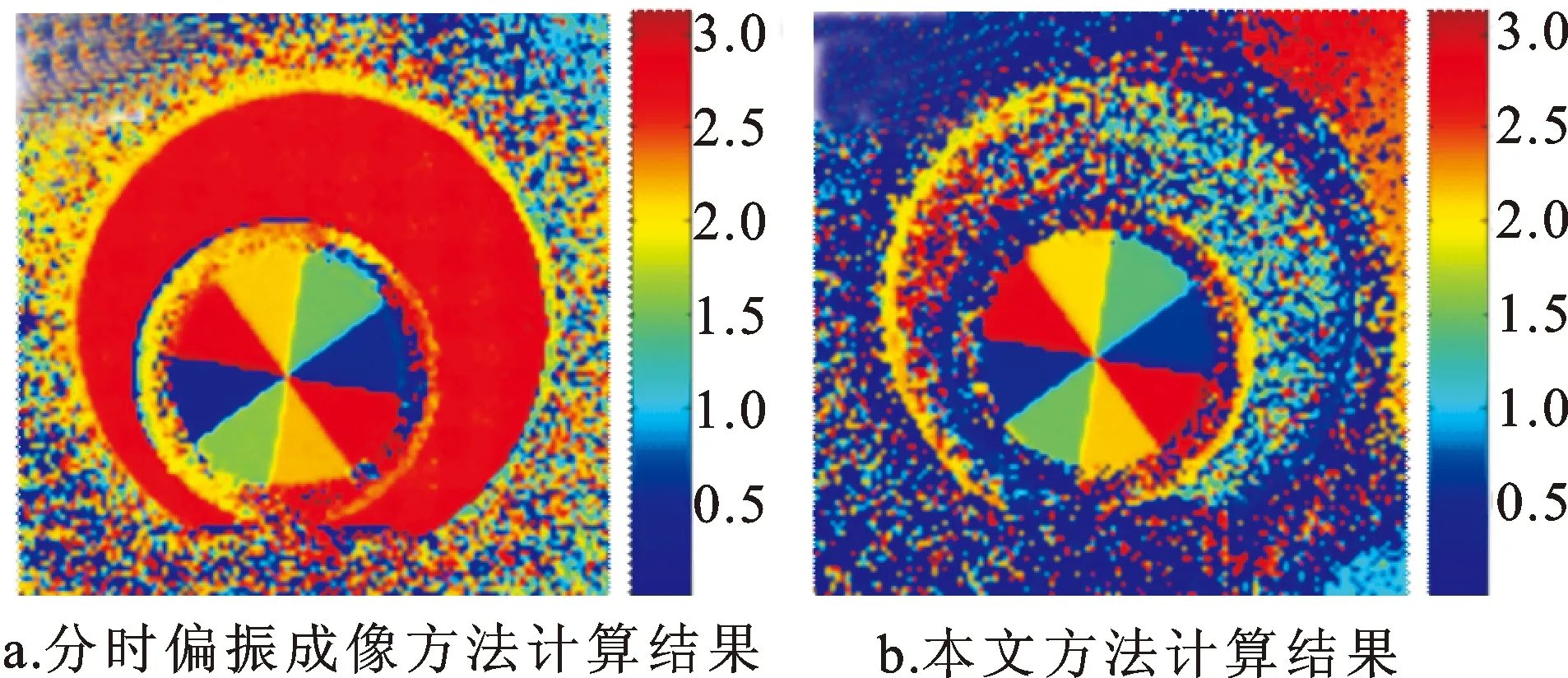
图6 偏振角图像对比Fig.6 Comparing of the angle of polarization
2.2 室外偏振成像实验结果
利用本文提出的同时偏振成像方法开展了室外偏振成像实验,实验结果如图7所示。自然光成像一般含有较少的偏振成分,为了证明本方法在室外成像的可行性和实验结果的可视性,拍摄场景选择了建筑物的玻璃外墙反射地面的场景,具有较高的偏振成分。图7a为利用本文提出的同时偏振成像方法的直接拍摄图。由于建筑物外墙玻璃是黄色的,因此直接拍摄图中的目标场景偏黄。该偏色是由玻璃的光谱反射率不一样导致的,并不影响后续偏振参数的计算。图7b为利用图7a计算得到的该场景偏振度图,图7c为分时偏振成像方法计算得到的偏振度图。对比可以看出,图7b和图7c镜面反射场景偏振态信息的强度和轮廓表现一致,图7c的细节信息与图7a的细节信息更接近,而图7b的植被和地砖的对比度较高。图中黄色方框的部分被放大,从图7b、c的放大图中可以看出其边缘部分有很大不同。这是由于本文提出的方法偏振图像完全匹配,不存在图像畸变的问题;而分时偏振成像系统由于需要旋转偏振片,难以保证分时获得的多幅偏振图像的像素完全匹配。因此,在图7c中的高亮边缘实际上是虚假偏振信息,是由图像间失配导致的,而图7b则不存在边缘假偏振信息现象。图7所示的实验结果证明了本文提出的同时偏振成像方法可以有效地用于室外环境偏振探测应用,而且可有效消除多幅图像间畸变和需配准的缺点。
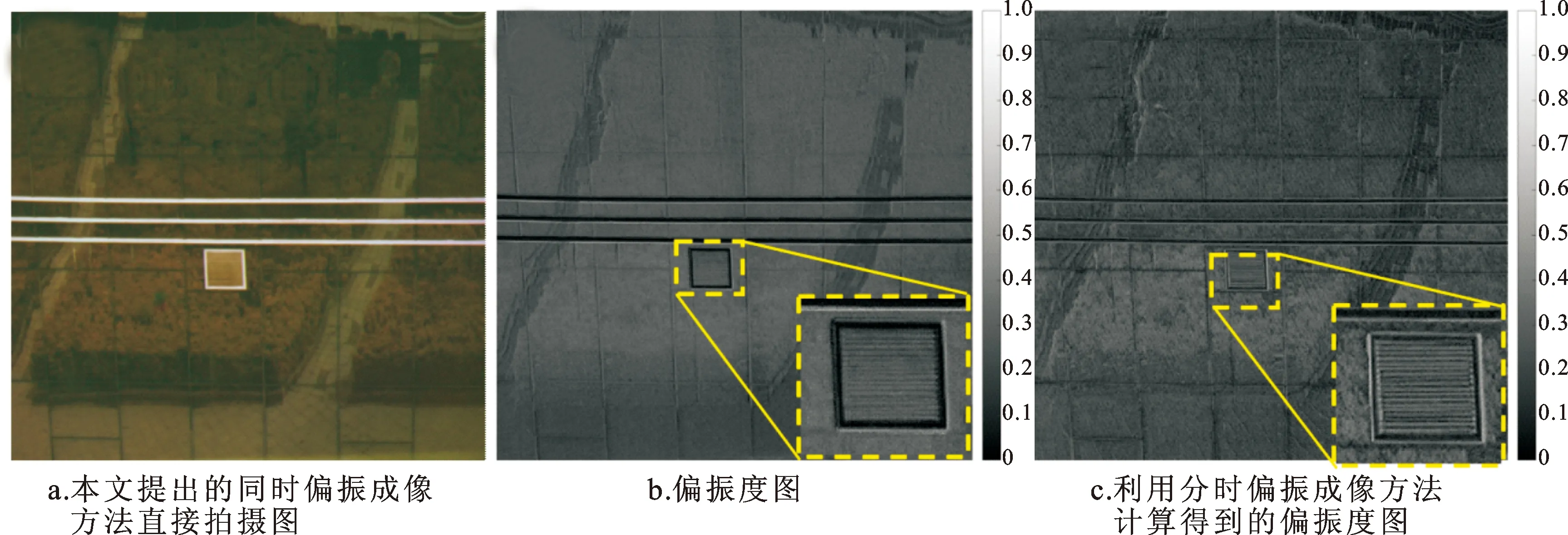
图7 室外偏振成像实验结果Fig.7 The outdoor experimental results
3 结论
本文提出了一种基于颜色编码滤波的同时偏振成像方法,特殊设计并制作了一种偏振颜色滤波片,具有偏振调制和颜色滤波的功能。将该偏振颜色滤波片放置在相机成像镜头的孔径光阑处构建3个偏振成像通道。入射光在3个偏振成像通道进行颜色滤波和偏振调制,然后在同一彩色探测器上成像,三通道的图像在彩色探测器上非相干叠加,拍摄成一幅携带有偏振信息的彩色图像。对拍摄的彩色图像进行计算,从红绿蓝三通道的图像恢复出3个偏振图像,进一步计算得到该场景信息的Stokes矢量,最终实现单镜头、单光路和单探测器的凝视型同时偏振成像。
该方法具有如下优势:首先,利用偏振颜色滤波片在孔径光阑位置处进行光波调制,可以使整个偏振成像系统结构紧凑;其次,单光路保证了多幅图像间的像素级配准,不存在图像畸变;再次,利用该方法实现的偏振成像探测系统的成本非常低,探测精度较高,方便移植改造。另外,该方法可以保留偏振成像系统的时间和空间分辨率。本文提出的同时偏振成像方法可进一步延伸至全偏振成像。因此,下一步的工作主要集中在两方面:一是对该方法的精确定标,进一步提升可靠性和偏振探测能力;二是拓展该方法的圆偏振探测能力,实现凝视型的全偏振探测。
猜你喜欢
物理学报(2022年23期)2022-12-14
中国惯性技术学报(2020年2期)2020-07-24
知识就是力量(2020年4期)2020-05-20
光学精密工程(2020年2期)2020-04-08
成都信息工程大学学报(2019年4期)2019-11-04
数学物理学报(2019年3期)2019-07-23
电子制作(2019年12期)2019-07-16
火力与指挥控制(2019年4期)2019-06-14
家庭影院技术(2018年9期)2018-11-02
制造技术与机床(2017年7期)2018-01-19