
基于UWB的室内人员定位系统的应用
2022-02-22 13:34倪晓明夏丽莉于肇贤石自辉杨思琪
物联网技术 2022年2期
刘 畅,倪晓明,夏丽莉,于肇贤,石自辉,杨思琪
(1.北京信息科技大学 理学院,北京 100192;2.国电龙源电气有限公司,北京 100039)
0 引 言
随着无线通信技术和移动互联网的迅速发展,人们对定位服务也提出了更多要求。为实现室内、室外定位服务的无缝衔接,高精度、低成本、适应性强的室内定位技术渐渐成为人们研究的重点。UWB技术是一种基于脉冲信号的无载波无线通信技术,UWB 信号是带宽大于500 MHz或基带带宽与载波频率比值大于0.2的脉冲信号,具有传输速率高、功率低、穿透能力强、定位精度高等优点,理论上其定位精度可以达到厘米级,这使得它在室内定位领域独占鳌头。
本文设计了基于UWB的室内定位系统,定位标签通过UWB信号与定位基站通信,实现定位标签的测距、定位。测距信息由定位基站上传至服务器,由定位引擎采用定位算法进行计算并加入改进后的卡尔曼滤波算法,最终得出实时定位坐标。
1 系统整体结构
UWB室内定位系统主要由标签、基站和显示平台组成。标签是以脉冲方式发射UWB信号的硬件装置。基站被安放在标签所在的室内环境中,它在接收到UWB脉冲信号后,将信号传送到服务器进行算法解析,最终上传至上位机平台显示。
基站在给定的时隙内接收定位标签定位请求帧,记录接收的定位请求帧时的自身时间、定位请求序号、发起定位请求标签的地址、发起定位标签的电池报警等信息。在一个定位周期结束后,各基站通过以太网把数据发送给定位引擎,发送的信息包括本基站与主基站的时间差,接收到的定位标签定位序号,及接收到标签的时间等信息。
系统网络模型如图1所示。

图1 系统网络模型
2 硬件设计
定位基站系统框架如图2所示。
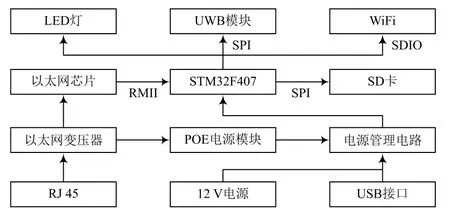
图2 定位基站系统框架
定位基站选用STM32F407VG主控芯片,使用Micro USB接口、外部电源、POE三种方式供电。RJ 45采用HR911105,以太网变压器采用HR601680,以太网PHY芯片采用LAN8720,POE模块采用WC-PD25D050LV,12 V宽范围电源芯片采用LM22676。SDIO接口外接WiFi模块,SPI口外接TF卡和DWM1000 模块。由JTAG和SWD调试接口。
定位卡片的设计框架如图3所示。
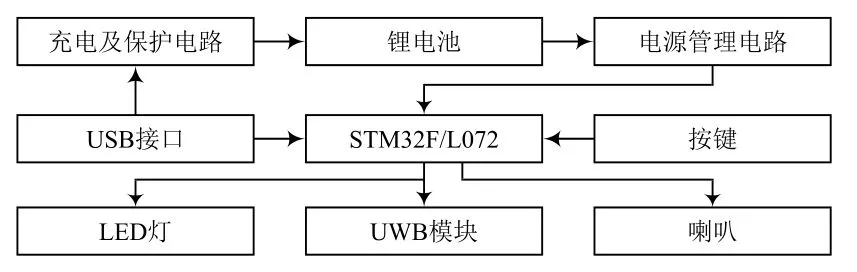
图3 定位卡片设计框图
定位标签采用DecaWave公司出品的DW1000芯片,主控芯片采用STM32L/F072低功耗单片机,使用SPI与DWM1000模块通信。采用锂电池供电,使用Micro USB口对电池充电。使用Micro USB虚拟串口对标签进行参数配置和程序更新。
3 核心定位算法
TOA是基于信号到达时间的一种测距技术,其实现原理是通过测取发射器发出信号到达接收器所需时间,再利用电磁波传播时间与传播距离间的数学关系计算两基站间的距离,然后结合已知定位基站的位置信息确定定位目标的位置。计算公式如下:

式中:t为采用TOA算法的传输时间;d为标签到基站的传输距离;c为空气中的传播速度。
基站获取信号传输时延,需获取标签的发射时间。所以标签和基站的时钟应该保持精准同步。而硬件设备难以达到较高精度,且考虑到目标信号在空气中近似以光速传播,所以微小的时间误差会造成较大的距离估计误差,导致定位失准。针对此问题,可将发射和接收端的数据信号进行差分处理,避免硬件设备的同步时钟问题,以减少误差的影响。
3.1 测距算法
精准的距离估算是实现高精度室内定位系统的前提。通过记录测距消息的收发时间戳来计算无线信号从基站到标签的传播时间,最后用时间乘以光速得到信号传播距离。
根据测距消息的传输方式不同可分为单向测距和双向测距,其中单向测距中测距消息仅单向传播,但为获得设备间的飞行时间,需要双方设备保持精确的时钟同步,系统实现复杂度和成本较高。而双向测距对双方设备的时钟同步无要求,系统实现复杂度和成本较低,因而采用双向测距方案。
非对称TWR的特点是无需进行时钟同步,且可以减少时钟漂移和频率漂移的影响,测量更精确。因此采用非对称TWR方法,也可称为双边双向测距方法(Double-Sided Two-Way Ranging,DS-TWR),标签和基站需要进行多次数据往复传输。
测距原理如图4所示。
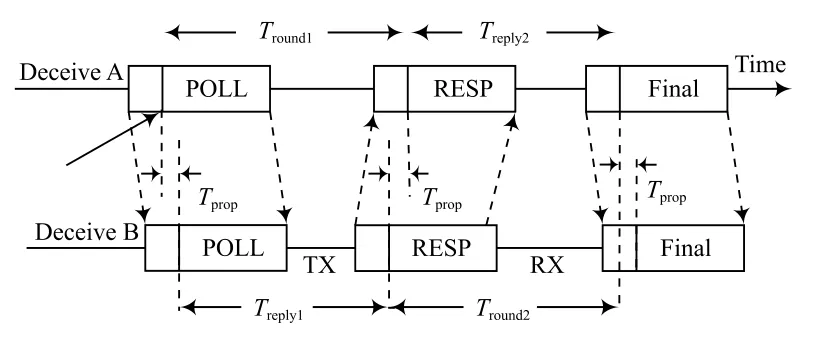
图4 测距原理
Device A和Device B是UWB模块。测距首先由A发起,B收到之后再发回一个响应(Responds),A再接收该响应,完成一次测距。A和B每次发送数据和收到数据时,都要记录当前时间戳,时间戳相减,就可以得到传输时间差。计算公式见式(2):

3.2 定位算法
定位算法主要处理流程如图5所示。
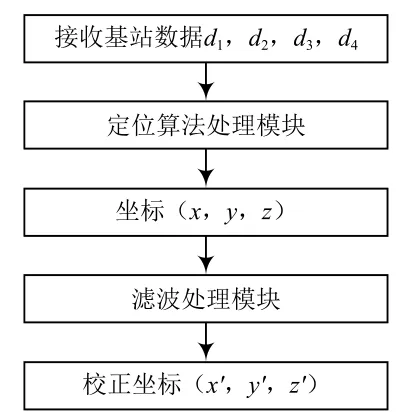
图5 定位算法主要处理流程
TOA定位算法的基本原理:根据移动标签到3个基站信号传播的测距值,计算终端到3个基站间的距离c×t、c×t、c×t,然后求解交点,实现对移动标签的定位,可简称为三点定位原理,用公式表示如下:
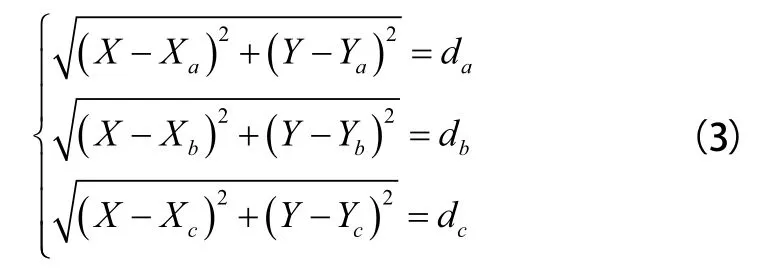
标签信号发射后,3个或3个以上基站接收到UWB信号后,以所得传输距离为半径,以基站为圆心作圆,交叉点即为标签位置。
4 卡尔曼滤波
4.1 卡尔曼滤波原理
为了获得更高精度的连续测距值以降低定位误差,在UWB定位系统中采用卡尔曼滤波对原始测距值进行滤波处理。
卡尔曼滤波利用某一时刻的实测值与前一时刻的先验估计值来预测当前的状态,是一种经典的递归滤波器,且计算复杂度较低,适合在本系统中应用。
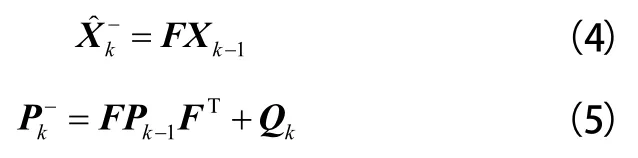
传统的卡尔曼滤波方法分为预测和更新两步:首先,需要进行状态预测,预测过程主要包含状态预测与误差协方差预测,具体表达形式为:

其次,需要进行状态更新。更新过程主要包含卡尔曼增益矩阵的计算以及状态与误差协方差矩阵的更新。
新息方程:
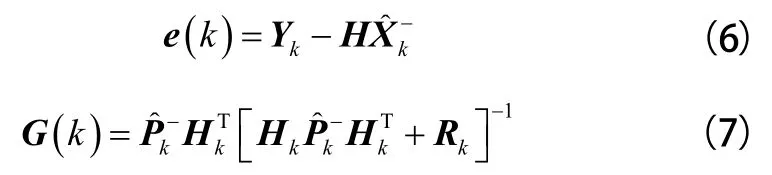
估计方程:

4.2 NLOS误差的消除
实际环境中存在各种障碍物,这些障碍物会对信号的正常传播产生诸多影响,包括信号反射、衍射、多径效应等。信号非视距(Non Line of Sight,NLOS)传播会对信号定位结果造成较大影响。
文献[8]指出,木板、纸板、玻璃等遮挡物对UWB信号的传输无太大影响。但实体墙、钢板、钢筋混凝土等材料对UWB信号可造成较大衰减。人体的主要成分是水,水也分会吸收部分UWB信号,从而影响定位。上述NLOS会导致定位误差的增加,因此有效的NLOS误差鉴别与处理是保证定位精度的必要措施。
本文在传统卡尔曼滤波剔除标准偏差的基础上,通过综合判断当前测距值与上一采样点卡尔曼滤波估计后测距值之差的绝对值是否大于测距环境判定阈值,从而判断当前时刻是否存在由于NLOS误差引发的异常抖动。根据阈值判断出可能存在的NLOS误差点,进行平滑处理。

偏差的影响需通过计算当前测距值与上一个采样卡尔曼滤波后的预测估计值之差,判断其是否大于事先设定的阈值,如果存在NLOS误差,将误差m迭代到下一步进行修正。
5 测试数据及误差分析
5.1 环境及基站布局
测试环境选择了某个展示大厅,在大厅的16个位置安装好基站,如图5所示。展厅环境较为复杂,存在柱形障碍物、桌子及其他设备,人员走动频繁。实际环境及基站位置如图6所示。基站位置见表1所列。
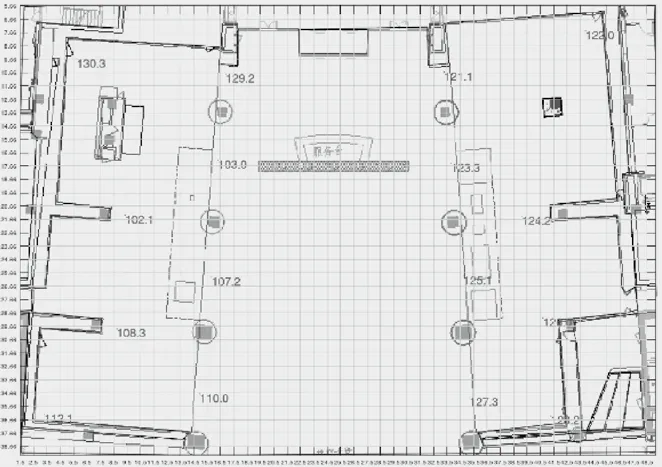
图6 环境及基站布局
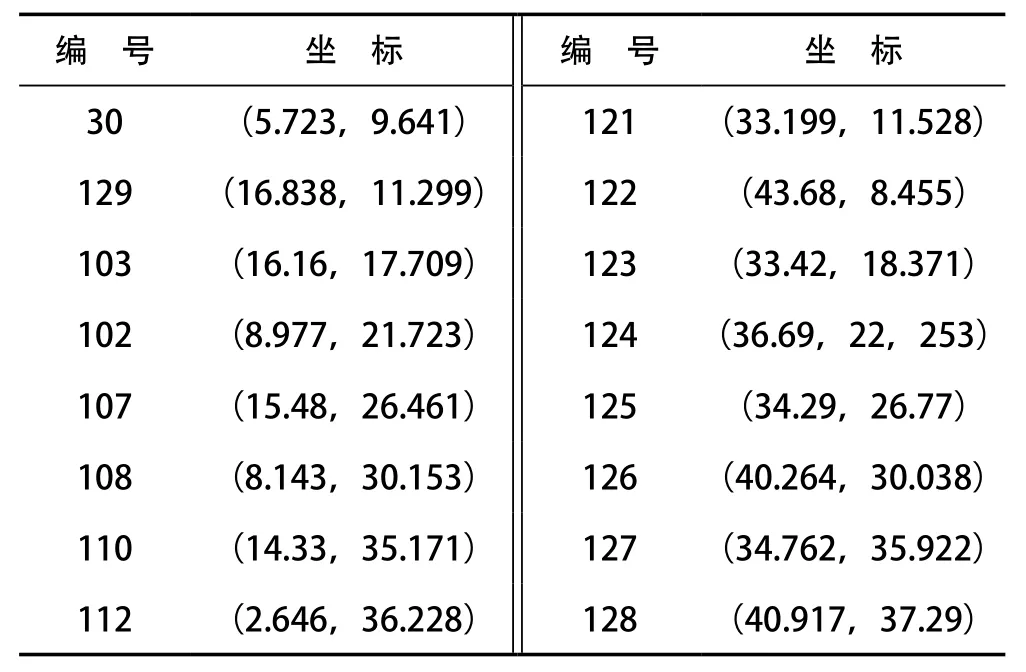
表1 基站位置 m
5.2 固定位置标签测试
选取大厅中的4个位置进行静态标签测试。本文对每个定点进行1 min数据采集测试,每次测试后进行晃动,并抽取部分数据进行误差分析。
在衡量精度与误差方面,采用欧氏距离偏差以及均方根作为标准。在二维平面下,预测点的欧氏距离偏差计算公式如下:

RMSE的计算方法如下:

式中:(x,y)为移动标签的实际坐标;(x,y)为算法解析后的坐标。
误差及均方根误差分析见表2所列。

表2 误差及均方根误差分析 m
标签静态测试结果显示,定位坐标平均误差在20 cm以下,说明本定位系统具有较高的定位精度。
5.3 未滤除NLOS误差移动标签测试
标签初始位置设为东向,为地图中服务台位置,坐标(24.5,15.66),然后手持标签在大厅中以2 m/s(人行走的正常速度)的速度按照预定方形轨迹进行匀速直线移动。图7中轨迹即为上位机平台定位解算后的运动轨迹。
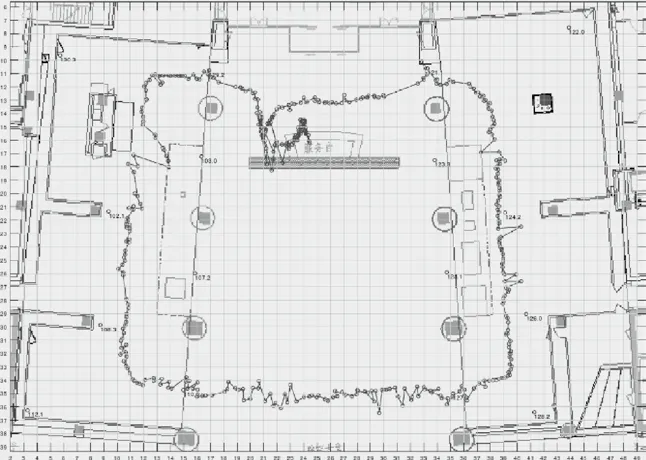
图7 NLOS消除前路径图
从图7可以看出,大部分阶段轨迹平滑,存在不超过20 cm的误差,该阶段标签与基站间无障碍物阻挡,为视距LOS路径,不可避免。该类误差通过卡尔曼滤波的方法即可剔除。
但由于NLOS的影响,图中多次出现异常抖动,多径效应的影响明显,实测距离值误差较大,可看出部分采样点误差高达1~3 m。因此需要通过阈值判断的方法改进卡尔曼滤波方法,滤除NLOS误差。
5.4 滤除NLOS误差后移动标签测试
改进卡尔曼滤波方法滤除NLOS后的轨迹如图8所示。
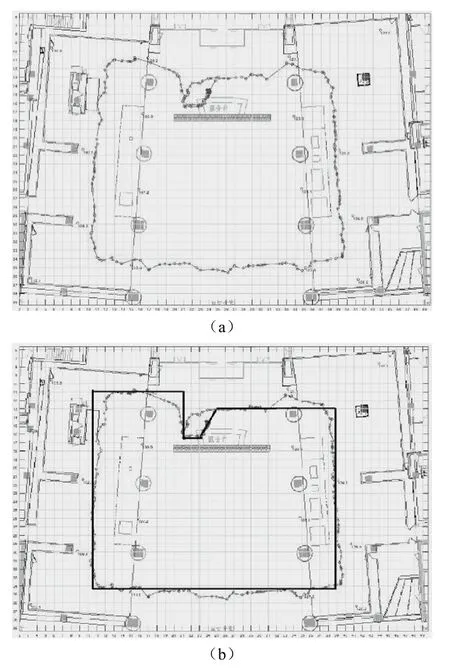
图8 改进卡尔曼滤波方法滤除NLOS后的轨迹
根据上位机平台显示轨迹看出,经过本文算法处理后的显示轨迹与实际轨迹几乎重合;经过对NLOS误差二次分析处理的定位结果精度得到了提升,异常抖动去除明显,平均误差控制约为20 cm。由此可见,采用本文的定位方法能够大幅提高精度,在室内复杂环境中具有一定的应用价值。
6 结 语
本文在实现完整的UWB室内定位系统基础上,将静态人员定位误差控制在20 cm以内,并在动态标签运动情况中对存在的NLOS误差做了进一步消除,实验结果验证了本文设计方案具有一定的实用价值。但本文方案还未在非匀速状态或存在动态加速度的定位系统中加以测试验证。且NLOS的误差在不同环境下会发生变化,在阈值设置和在更为复杂环境中如何调整是下一步将要重点研究的问题。
猜你喜欢
科学(2020年3期)2020-01-06
北京航空航天大学学报(2017年9期)2017-12-18
电子制作(2017年7期)2017-06-05
探索科学(2017年4期)2017-05-04
中国交通信息化(2016年8期)2016-06-06
电源技术(2016年9期)2016-02-27
电源技术(2015年1期)2015-08-22
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
发明与创新(2015年29期)2015-02-27
太空探索(2014年1期)2014-07-10
