
基于UWB定位技术的建筑工地人员安全管理系统
2022-02-22 13:34罗炬锋单联海
物联网技术 2022年2期
张 力,罗炬锋,单联海
(1.上海物联网有限公司,上海 201899;2.中国科学院上海微系统与信息技术研究所,上海 200050;3.云池网络科技(上海)有限公司,上海 200030)
0 引 言
近年来,随着我国经济实力的高速增长,城市化进程不断加快,基建投资急剧增多,超大规模、超高层建筑如雨后春笋般在各大城市拔地而起。超高层建筑可缓解城市土地资源日益紧缺的压力,已成为当前建筑行业发展的主流趋势。超高层建筑施工现场环境复杂多变,施工过程涉及大量高空作业和临边作业等项目,同时还存在多工种交叉作业的情况,加之施工人员不熟悉现场环境、操作不规范、安全防范措施不到位等因素影响,极易引发如高坠、触电、物体打击、机械伤害等安全事故,其中高坠事故占据极大比重。研究和采取科学有效的预防措施,减少甚至杜绝上述事故的发生,对于保障建筑施工人员人身安全、提升建筑施工企业社会形象、推进建筑施工安全文明标准化都具有重要意义。
在引发建筑施工安全事故的众多因素中,施工人员的不安全行为是重要诱因。由于现场施工人员众多、素质良莠不齐,传统的安全管理手段中,入场安全教育能在一定程度上提高人员安全意识,但不能有效约束或监督其在施工现场的不安全行为;而以定期现场安全检查为代表的传统安全监督检查机制,无法对人员不安全行为进行全天候的实时监控和预警,亦难以满足现实需要。针对上述现状,本文提出一种基于超宽带(Ultra Wide Band,UWB)定位技术的建筑工地人员安全管理系统,利用实时获取的施工人员精确位置信息,随时掌握人员位置、活动轨迹及各区域人员分布情况,对人员靠近或滞留危险区域的行为进行提醒和预警,预防和减少高坠等安全事故的发生,实现建筑施工现场安全管理的信息化与智能化。
1 系统方案
1.1 UWB定位技术
超高层建筑物一般为钢筋混凝土结构,卫星信号难以到达其内部,因此传统的室外卫星定位技术如GPS定位技术不适用于本文讨论的应用场景。针对室内环境下的定位,目前的主流方案主要基于WiFi、蓝牙、ZigBee、红外线、RFID、UWB等技术。与其他几种无线技术相比,UWB技术具有抗干扰能力强、抗多径效应好、测距精度高等优点,非常适合用于室内复杂环境中的移动目标定位,因而在室内定位系统方案中倍受青睐。UWB定位技术的基本原理是利用在室内环境中部署若干能接收UWB脉冲信号的定位基站,定位对象(人员或物品)携带或安装可发送UWB脉冲信号的定位标签,由于定位标签发送的脉冲信号到达各定位基站的时间不同,故后台定位算法将利用该时间差来计算定位标签的位置,一般选用基于到达时间(Time of Arrival,TOA)或到达时间差(Time Difference of Arrival,TDOA)的方法。不同定位技术的对比见表1所列,可以看出,UWB定位技术能实现厘米级的定位精度,可以满足建筑施工现场人员精确定位的需求。
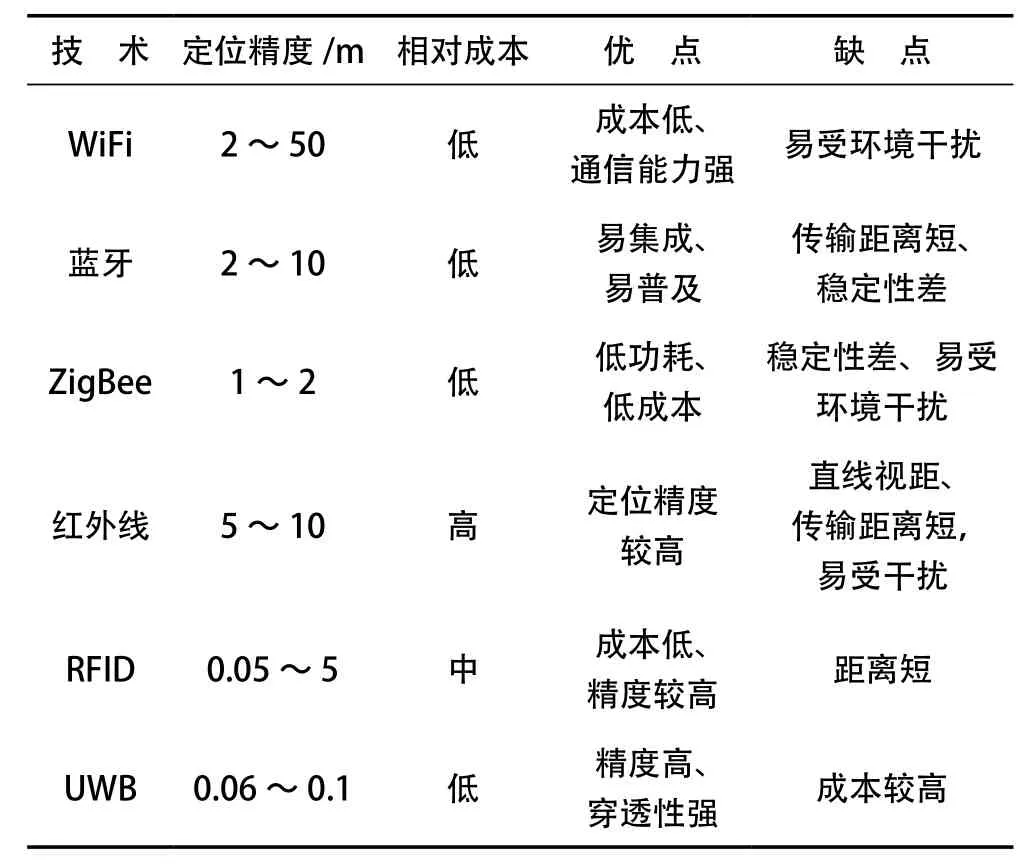
表1 不同室内定位技术对比[4]
1.2 系统架构
系统架构自下而上可以分为感知层、网络层、应用层,如图1所示。
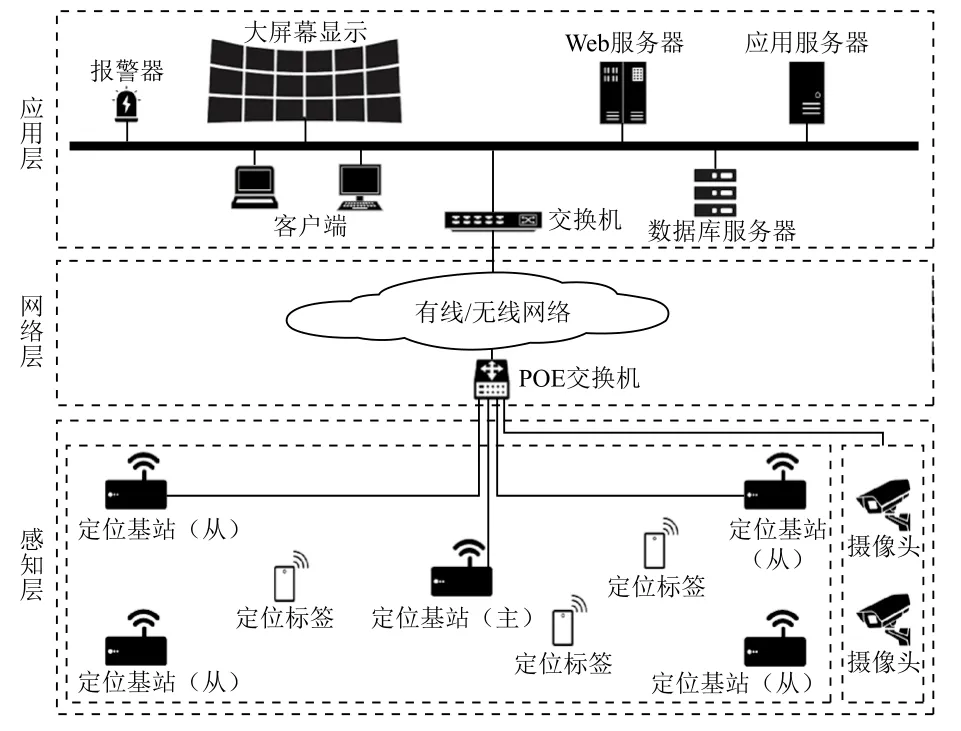
图1 系统架构示意图
感知层包含2类终端,即定位终端和图像采集终端。其中,定位终端主要包含若干用于确定位置安装的定位基站和施工人员随身携带的定位标签。基站数量一般不少于3个,且其中1个为主基站,其余为从基站。主基站负责定时向从基站发送时钟同步信号,以保证主、从基站间的时钟同步,基站可以通过以太网供电(Power over Ethernet,POE)或通过直流电源供电,并通过网络层的有线网络或无线网络向应用层后台服务器发送数据。定位标签使用电池供电,且内置加速度传感器,当其长时间处于静止状态时将自动进入低功耗休眠模式以减少电量消耗,若标签发生移动则自动进入唤醒模式,并以一定频率向各基站发送包含标签ID、发送时间戳、发包序号等信息的定位数据包。图像采集终端主要为摄像头,其以POE方式供电,通过网络层有线网络向服务器发送现场视频图像数据。应用层的后台服务器收到定位基站发来的定位数据后,参考各基站的位置坐标,利用定位算法计算出定位标签的位置坐标,并通过客户端电脑、大屏幕、报警器等终端设备提供实时定位结果显示、历史轨迹查询、视频联动查看、危险行为预警等功能。
2 硬件设计
系统硬件设计主要针对UWB定位基站和定位标签,下面分别对其核心模块及设计思路进行介绍。
2.1 定位基站
定位基站的核心模块包括主控模块、UWB模块、通信模块和电源管理模块,硬件框架如图2所示。
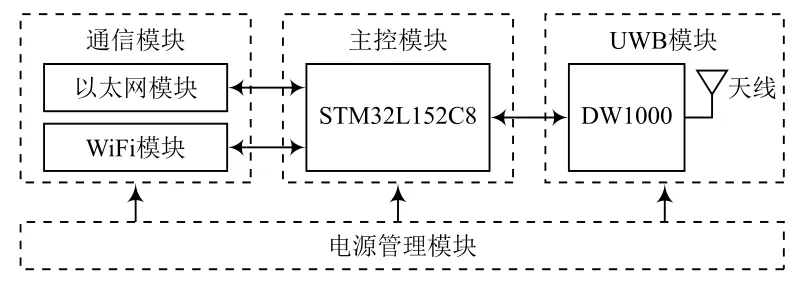
图2 定位基站硬件框架
主控模块负责为UWB模块提供相关时序及数据交互,并通过控制通信模块实现定位基站与后台服务器间的通信。主控模块核心元件采用意法半导体公司出品的超低功耗32位微控制器STM32L152C8,该芯片基于高性能ARM Cortex-M3内核,最高工作频率可达32 MHz,具有128 KB的程序存储空间和16 KB的运行内存,拥有多种通信接口,如IC、SPI、USART、USB等,及丰富的可编程I/O以及A/D、D/A资源,具备低至0.3 μA的低功耗待机模式和9 μA的低功耗运行模式。这款芯片具有处理速率快、功耗低、体积小、成本低、适用性强等优点,非常适合用作各类物联网感知终端的微控制器。
UWB模块主要包含一块UWB无线收发芯片以及通过射频电路与之相连的内置式全向平面天线。UWB无线收发芯片采用DecaWave公司出品的DW1000,该芯片符合IEEE802.15.4-2011标准,抗多径衰落能力强,具有可编程射频功率输出功能,支持最高6.8 Mb/s的数据传输速率,睡眠模式电流为1 μA,在实时定位系统(Real Time Location System,RTLS)中支持高标签密度,定位精度可达厘米级,其通过SPI总线与主控模块中的微控制器进行数据交互。
通信模块为定位基站提供有线和无线网络通信功能,由以太网模块和WiFi模块组成。其中,以太网模块核心元件为德州仪器公司出品的TM4C129,该芯片内部包含以太网物理层的10BASE-T/100BASE-TX以太网控制器以及12位模数转换器,无需外界物理层芯片就可以实现以太网通信;WiFi模块核心元件为GainSpan公司出品的GS2101,这是一款高集成度超低功耗WiFi模块,支持IEEE 802.11b/g/n无线网络协议,最高无线速率为65 Mb/s,具有丰富的接口资源,可提供灵活、可靠、安全的无线网络连接。通信模块通过串口与主控模块进行数据交互。
电源管理模块利用POE供电转换电路和直流稳压电路为定位基站中各模块提供稳定的直流电源。定位基站实物及其安装效果如图3所示。
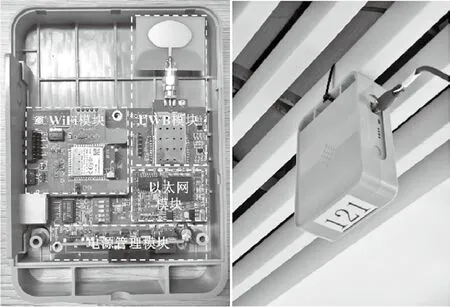
图3 定位基站实物及其安装效果示意图
2.2 定位标签
定位标签的核心模块包括主控模块、UWB模块、移动侦测模块和电源管理模块,硬件框架如图4所示。

图4 定位标签硬件框架
定位标签主控模块以及UWB模块中的微控制器、UWB无线收发芯片采用了和定位基站相同的方案,不同之处在于,为了将定位标签做得尽可能小从而保证其便携性,定位标签UWB模块中的天线采用了体积更小的板载陶瓷天线;同时,在DW1000芯片和天线之间增加了一个功率放大器(Power Amplifier,PA),当标签与基站的直接通信路径上存在遮挡时,标签射频信号能更容易被基站接收,从而提升系统的抗干扰能力。
移动侦测模块负责检测定位标签的运动状态,当定位标签从长时间静止状态下发生移动时,将标签从低功耗休眠模式唤醒。其核心元件为ADI公司出品的ADXL362,这是一款超低功耗、高分辨率三轴加速度计,能以极低的功耗进行阈值感测和运动加速度测量。移动侦测模块通过SPI总线与主控模块进行数据交互。
电源管理模块主要包括一块锂电池以及电压转换电路、电压检测电路等,负责为定位标签供电,并在主控模块的支持下提供电池电量检测等功能。
定位标签实物及其安装效果如图5所示。
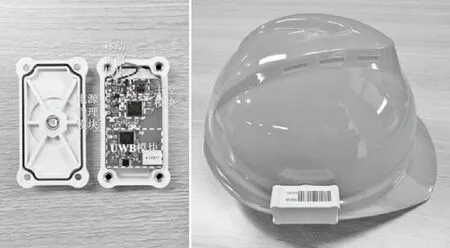
图5 定位标签实物及其安装效果示意图
3 软件设计
3.1 系统管理平台
系统管理平台根据应用需求采用模块化设计,基于B/S架构进行构建,主要由定位引擎、系统管理、数据管理、事件管理、应用服务五大功能模块组成。平台功能框架如图6所示。
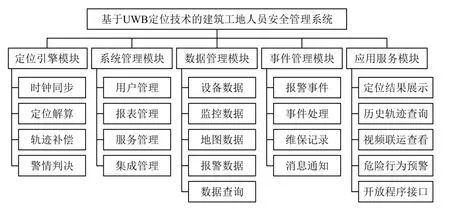
图6 系统管理平台功能框架
定位引擎模块:作为系统的核心功能模块,负责对定位终端上传的数据进行融合分析,基于定位软件算法完成主、从基站间的时钟同步,以及对定位标签的位置解算与轨迹补偿等优化处理,并根据定位解算结果对靠近或长时间滞留危险区域的警情事件做出判决。
系统管理模块:包括用户管理(用户登录、用户权限等)、基于信息整合的报表管理、系统服务管理与集成管理等。
数据管理模块:实现对定位终端等设备信息与实时状态数据、摄像头监控数据、监控区域地图数据以及报警记录数据的存储、分类、统计、查询等功能。
事件管理模块:实现对报警事件详情、事件处理状态以及设备与系统维护保养记录的管理,同时提供相关消息通知功能。
应用服务模块:依托后台客户端电脑、大屏幕,以及安装在现场警戒区域的报警器等终端设备,在定位引擎模块的支持下实现定位结果展示、历史轨迹查询、视频联动查看、危险行为预警等功能,同时提供开放应用程序接口,便于二次开发以及与其他平台实现数据共享。
3.2 终端软件流程
定位基站软件处理流程如图7所示。基站分为主基站和从基站,主基站定时向各从基站发送时钟同步信号作为所有基站的时钟同步基准,各从基站接收到时钟同步信号后,标记各自的接收时间戳并将其封装为时钟同步数据包,然后通过有线或无线网络上传至后台服务器。主、从基站接收到定位标签发送的定位数据帧后,标记各自的接收时间戳并将其封装为定位数据包,然后通过有线或无线网络发送至后台服务器。服务器的定位引擎模块利用相关算法完成主、从基站的时钟同步参数计算,以及标签位置解算等。
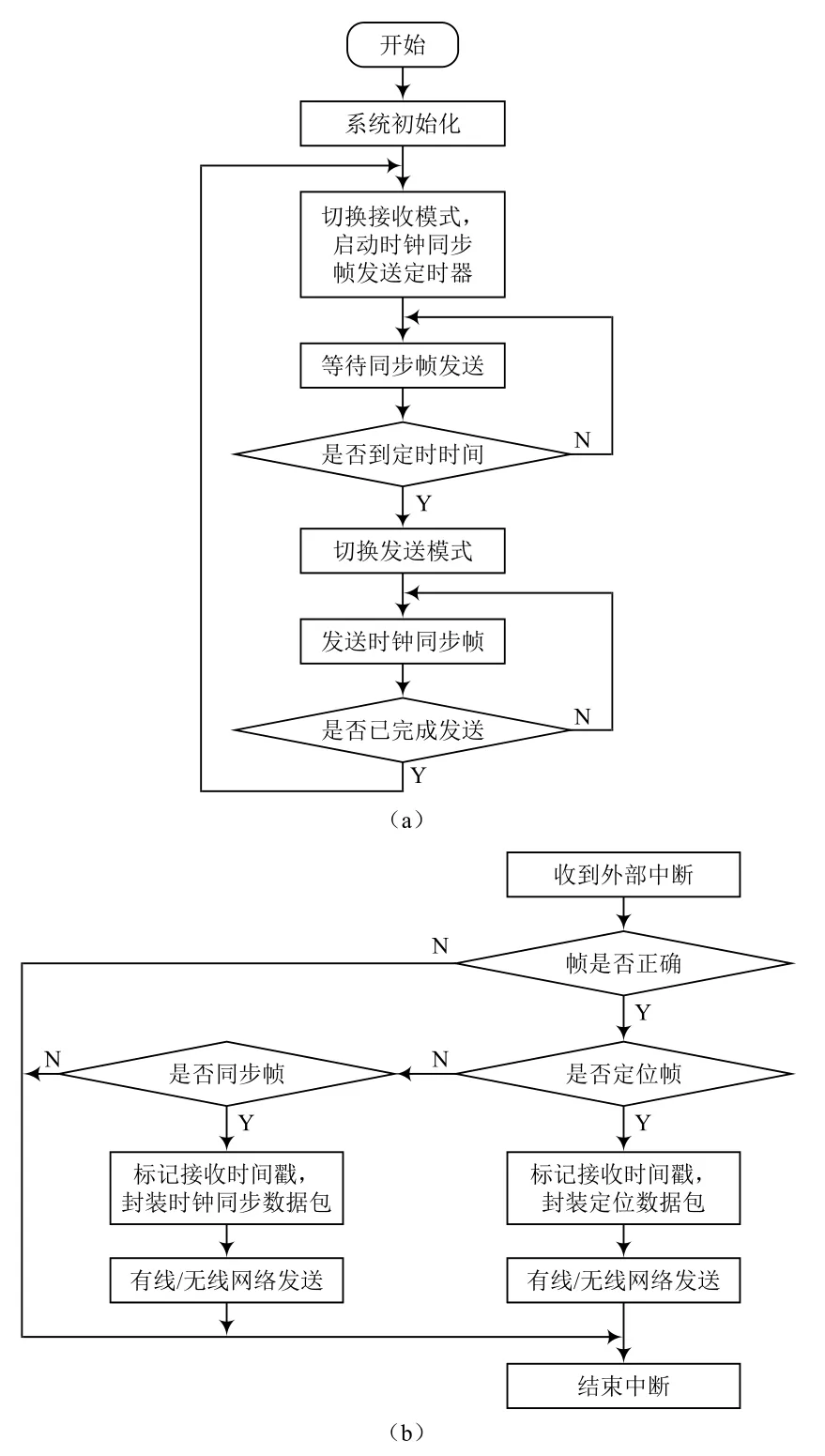
图7 基站软件处理流程
定位标签软件处理流程如图8所示。标签上电后初始状态为低功耗休眠模式,当移动侦测模块侦测到标签发生移动时,标签被唤醒,并开始以预设频率向各定位基站发送定位数据帧,同时持续侦测标签的运动状态,若标签超过一定时间未发生新的移动则重新进入低功耗休眠模式。
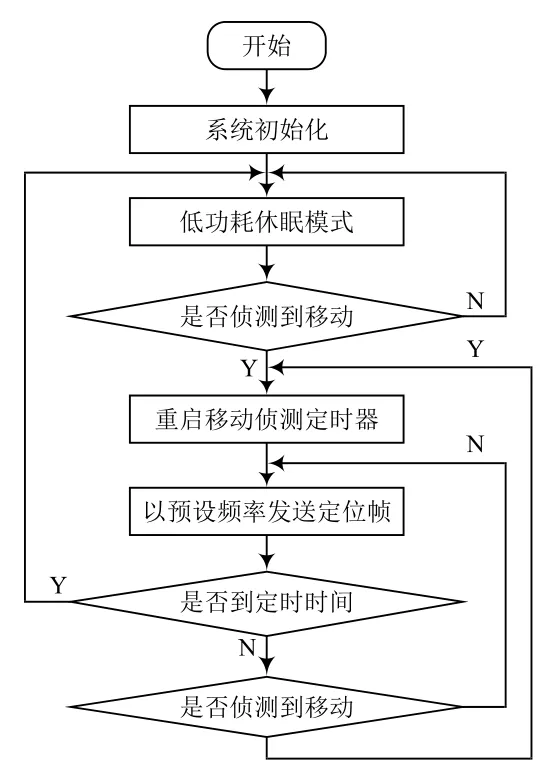
图8 标签软件处理流程
3.3 定位解算算法
本系统采用TDOA算法来完成定位标签的位置解算。与TOA算法相比,TDOA算法无需基站和标签保持时间同步,只需要各基站间保持时间同步即可,因此更容易实现。TDOA算法又被称为双曲线定位法,如图9所示。基本原理:在各定位基站位置坐标数据已知的条件下,利用UWB信号从定位标签到达不同基站所产生的多组时间差,经数学计算得到标签的位置坐标。
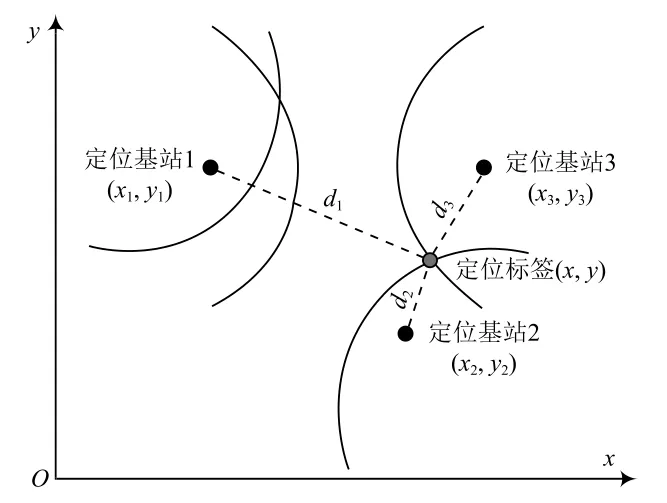
图9 TDOA算法示意图
若定位基站i(i=1,2,...,n,n≥3)的位置坐标(x,y)已知,待求解的定位标签坐标为(x,y),假设t为UWB信号从标签到基站i的传输时间,d为标签与基站i之间的距离,以基站1作为时钟参考基站,利用上述参数可以建立如下双曲线方程组:
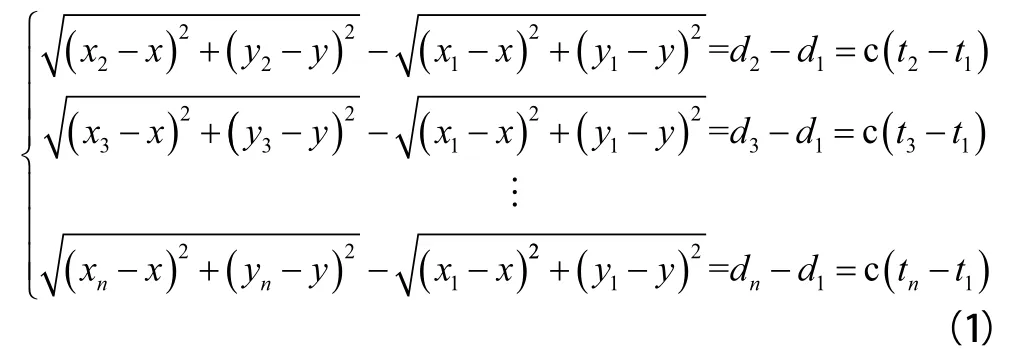
式中,c为电磁波传播速度。
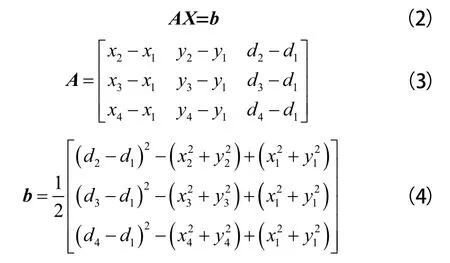
当n=4时,式(1)可以转换为矩阵特征方程:
利用最小二乘法求解可得:
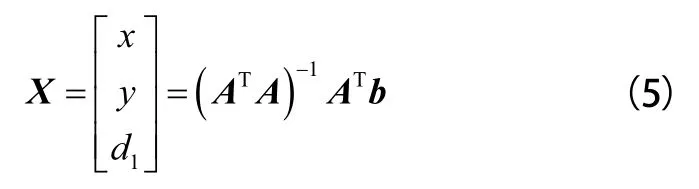
通过上述方法可以得到标签位置坐标的初步估计值,在实际应用中可以进一步利用Chan氏算法,通过多步加权最小二乘法对定位误差进行修正。同时,采用卡尔曼滤波算法消除信号传递过程中的干扰,从而减小非视距传播时由于障碍物阻挡所产生的误差。
4 实验测试
实验测试在某写字楼空置的13楼部分区域进行,该区域包含一个面积近200 m的房间以及一段长约30 m的走廊。在测试区域以相同高度部署了8个定位基站,其中房间内5个,走廊上3个。经过详细的测绘,确定8个基站以m为单位的平面坐标分别为(7.42,1.93),(16.97,1.71),(25.07,1.87),(7.42,9.16),(29.16,11.09),(0.2,11.09),(7.42,11.24),(29.16,11.09)。由测试人员携带定位标签在测试区域随意走动,通过后台测试软件查看实时定位结果。测试软件界面如图10所示,为方便比较,将现场同一时刻视频截图叠加于软件界面截图之上,图中虚线框标注区域为定位实验测试区域。图10显示,通过定位软件可以查看标签的实时位置及其历史轨迹。
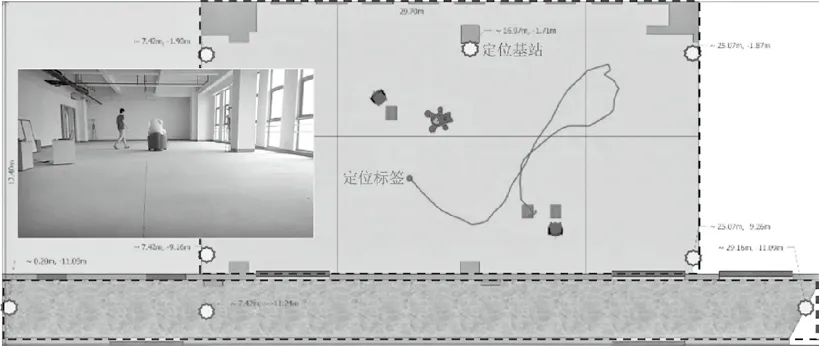
图10 实验测试软件界面
选取了10个位置作为测试点,根据系统软件计算得到的测试点定位标签坐标,参考现场测量得到的真实坐标,计算系统定位误差,测试结果见表2所列(表中数据单位均为m)。
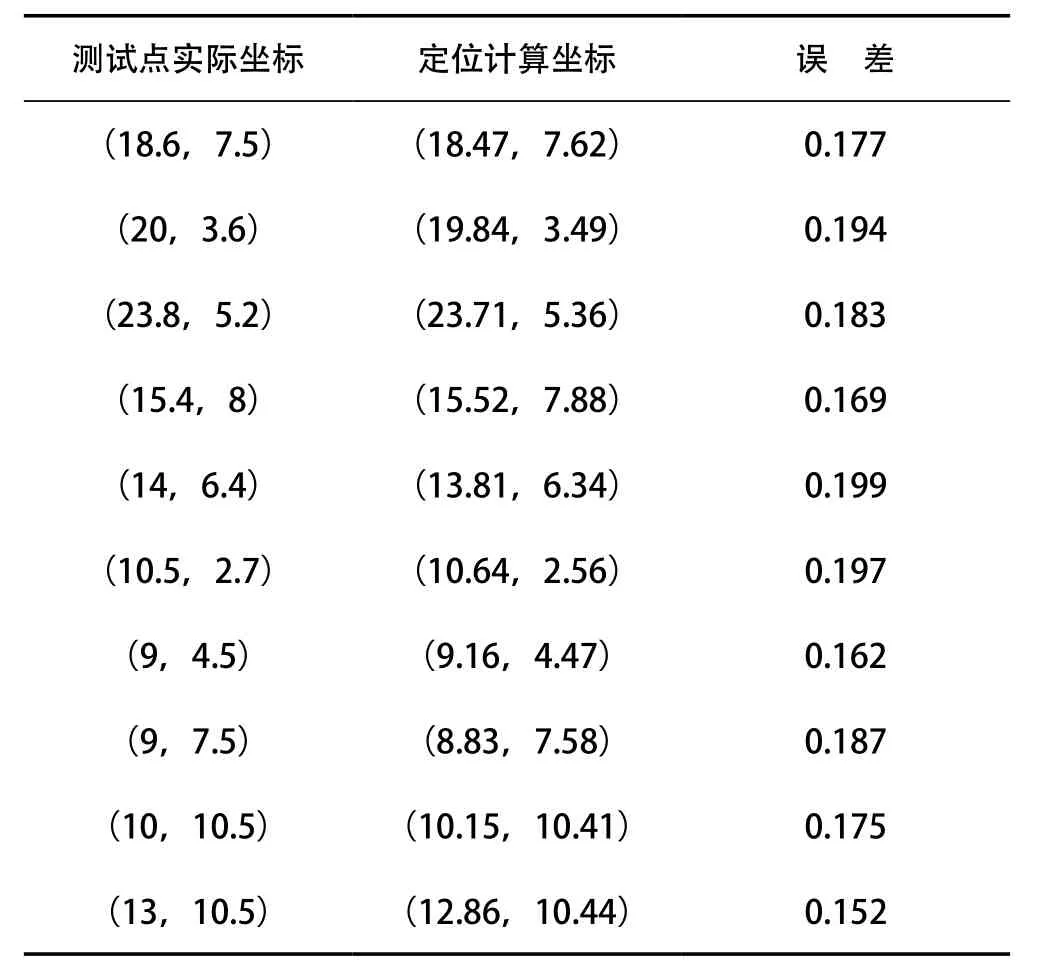
表2 定位实验测试结果 m
实验结果表明,系统定位误差在20 cm以内,能够满足建筑施工现场人员精确定位需求。
为了测试系统实际使用效果,在建设中的宁波新世界广场5#地块在建高层建筑“宁波塔”(总建筑面积16.9万平方米,最大高度249 m)内建筑工地搭建了演示系统,其软件界面如图11所示。现场演示实验表明,系统能够对携带定位标签的施工人员进行准确的实时定位跟踪,并且能够对人员靠近电梯井、高压设备、楼面边缘等危险区域的行为进行及时报警提醒。
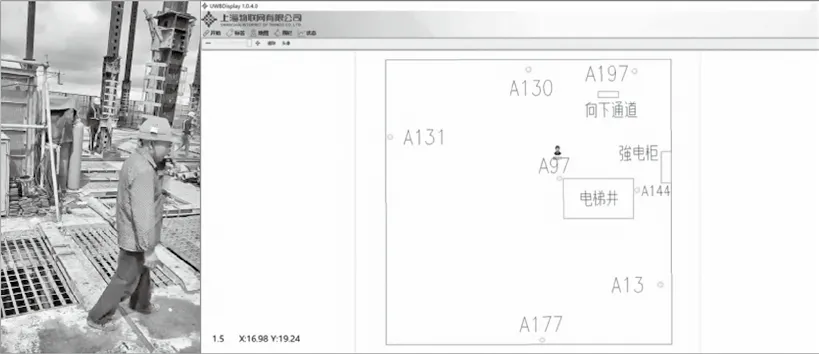
图11 高层建筑施工现场演示系统实时定位结果与同步视频图像
5 结 语
积极利用信息化手段提升高层建筑施工现场的安全保障水平正逐渐成为行业共识。本文提出的基于UWB定位技术的建筑工地人员安全管理系统,充分利用UWB定位技术厘米级的高精度特性,基于施工现场人员实时定位数据,结合现场视频图像,可对人员靠近或滞留危险区域的行为进行提醒和预警,有效预防安全事故的发生,实现建筑施工现场安全管理的信息化与智能化,有力保障高层建筑施工项目中施工人员的人身安全,提高项目安全管理部门的工作效率,助力建筑施工安全文明标准化建设。该系统可推广应用于大型车间、仓库、商场、博物馆、展览馆等场所的人员与物品的定位和管理,具有广阔的市场前景。
猜你喜欢
导航定位与授时(2020年5期)2020-09-23
铁道通信信号(2020年9期)2020-02-06
车迷(2018年11期)2018-08-30
海峡姐妹(2018年3期)2018-05-09
知识经济·中国直销(2018年3期)2018-04-12
探索科学(2017年4期)2017-05-04
中国交通信息化(2016年8期)2016-06-06
公民与法治(2016年10期)2016-05-17
学习月刊(2015年1期)2015-07-11
计算机工程(2015年8期)2015-07-03
