
窄行密植西洋参精密播种机设计与试验
2022-02-21 08:20:08廖宜涛李成良廖庆喜张百祥
农业机械学报 2022年1期
廖宜涛 李成良 廖庆喜 张百祥 郑 娟 杜 铮
(1.华中农业大学工学院, 武汉 430070; 2.农业农村部长江中下游农业装备重点实验室, 武汉 430070;3.武汉市农业科学院, 武汉 430070)
0 引言
西洋参是具有药用和保健价值的五加科人参属植物,种植经济效益显著[1-2],其种植有播种后直接采收和播种1~2年后移栽再采收两种模式,为提高商品化率,两种模式的播种密度都较大,农艺要求播种行距50~60 mm,播种株距100 mm左右,播深约20 mm,属于窄行密植精密播种[3]。因西洋参种子形状不规则、催芽裂口种胚易损伤、播种密集且要求分布均匀,目前生产上缺乏适用播种机械装备,以人工压穴后单粒点播再覆土为主,存在工作效率低、劳动强度大、劳动力消耗多、生产成本高等问题,严重制约了产业发展,迫切需要开发适用西洋参精密播种技术装备。
实现播种行株距均匀一致,精密排种技术是关键,种子平稳运移和精确定位技术是重要保障[4]。气吸式排种对种子形状适应性强、种子损伤率低、单粒排种精度高,广泛应用于玉米、油菜和马铃薯等宽行距作物精量播种[4-6]。近年来,国内外学者开展了基于气吸原理的窄行密植作物精密排种技术研究,但存在采用单排吸嘴往复排种效率偏低、采用导种管导种精度不足等问题[7-9]。全约束导种是实现种子平稳运移和精确定位的主动式导种方式,可应用于播种行株距要求严格的作物精密播种[10]。
国内外学者对全约束导种装置的研究主要集中在带式和单体点播式两种,设计了毛刷带式导种带[11-12]、输送带式导种带[13-14]、直插式穴播器[15]和回转式穴播器[16-18]等。上述导种装置可实现对种子离开排种器至落入种床土壤运移过程进行全自由度或者仅具有局部自由度的全约束,强制种子保持其有序状态;受制于全约束导种装置单体体积大且结构复杂,难以匹配窄行密植播种农艺要求。
针对上述问题,本文基于前期研制的多行并联气力针式精密集排器[3],以小型田园管理机为配套动力,设计一种采用多行并联行星轮点播式全约束导种装置的窄行密植西洋参精密播种机,完成起垄、精密排种、平稳导种和覆土作业,以期为西洋参精密播种提供配套技术装备。
1 整机及排种装置结构原理与传动方案设计
1.1 整机结构与工作原理
窄行密植西洋参精密播种机以小型田园管理机(含螺旋起垄装置)为配套动力,主要由汽油旋涡式风机、主机架、驱动装置、导种装置、排种装置、辅助轮及覆土板等组成,其结构示意图如图1所示。

图1 窄行密植西洋参精密播种机结构示意图Fig.1 Structure sketch of narrow-row-dense-planting precision planter for American ginseng1.汽油旋涡式风机 2.螺旋起垄装置 3.田园管理机 4.驱动装置 5.主机架 6.导种装置 7.排种装置 8.辅助轮 9.覆土板
播种机主机架前端连接在螺旋起垄装置上,驱动装置、导种装置、排种装置和覆土板前后依次布置在主机架上,一对辅助轮位于主机架后方外侧呈对称布置,用于支撑和辅助机具转移;因小型田园管理机功率较小,选用汽油旋涡式风机[19]为排种装置提供风压,额定功率4.1 kW,最大正压为35 kPa,最大负压为-25 kPa,风量为200 m3/h,通过控制节气门开度调节输出功率可调节风压和流量。机具主要技术参数如表1所示。

表1 窄行密植西洋参精密播种机主要技术参数Tab.1 Main technical parameters of narrow-row-dense-planting precision planter for American ginseng
西洋参播种作业时,机具作业状态如图2所示。先启动田园管理机与汽油旋涡式风机,螺旋起垄装置对旋耕碎土后平整地表进行螺旋起垄,汽油旋涡式风机为排种装置提供正负气压;驱动装置在田园管理机的牵引下,与起垄面摩擦通过链传动驱动导种装置和排种装置,播种机前进方向如图2标识;西洋参种子在自重作用下,由种箱内通过充种管流入充种室,排种装置在负压作用下,排种针从充种室吸种,转动至卸种区,在正压作用下卸种至导种装置内,完成排种环节;在行星轮系作用下,导种装置接种、运种并成穴投种,完成导种环节;排种装置和导种装置相互配合完成将种子由种箱运移至种床土壤多环节串联过程;覆土板进行种穴土壤回填合拢,完成覆土环节。

图2 窄行密植西洋参精密播种机作业状态示意图Fig.2 Sketch of narrow-row-dense-planting precision planter for American ginseng’s working status1.已耕地 2.耕底层 3.翻耕层 4.碎土层 5.垄体层 6.垄底层
1.2 排种装置结构与工作原理
排种装置作为播种机的核心部件,确保种群有序单粒化,其工作性能直接决定播种机作业质量。采用负压吸种、正压卸种工作原理的气力针式精密集排器[3],该集排器主要由气室、旋转盘、气流分配管、排种针、排种链轮、排种轴、种箱、充种管和充种室等组成,工作分为吸种、携种和卸种3个过程,其结构如图3所示。

图3 排种装置结构简图Fig.3 Schematics of seed metering device1.排种针 2.种箱 3.充种管 4.充种室 5.气室 6.旋转盘 7.气流分配管 8.排种轴 9.排种链轮
集排器为对称结构,左右各一个气室,气室外侧面封闭,气室内腔由气室隔板划分为正压区和负压区,分别与风机吸气端和排气端连通,气室内侧面与旋转盘接触处设计为阶梯型止口,充种室布置在两侧气室间;两侧排种轴分别穿过两侧气室,排种轴外端连接排种链轮,内端与气室内侧面的旋转盘同轴固定连接,以排种轴所在轴线为中心径向均布6根气流分配管,气流分配管的两端分别固定在两侧旋转盘上,气流分配管上均布用于单粒排种的排种针;即排种链轮、排种轴、旋转盘、气流分配管和排种针组成一刚性连接整体,由左右气室内部的轴承支撑,做旋转运动,气室安装在主机架上固定不动。
根据配套动力、起垄垄面宽度和播种农艺要求,设定播种行距为56 mm,播种行数为16行,即每根气流分配管上相邻排种针轴向间距为56 mm,每根气流分配管上轴向均布16个排种针;排种针包括圆筒部和锥筒部,排种针型孔处吸附面直径为3 mm,排种针型孔处种子运动面直径为350 mm。
排种装置工作时,种箱内的种子在自重作用下经充种管流入充种室,排种链轮带动排种轴、旋转盘、气流分配管和排种针组成的刚性连接整体逆时针旋转,排种针在吸种区负压作用下从充种室单粒吸种,通过携种区转动至卸种区,在自重、正压吹力等作用下卸种至同转速转动的导种装置内。
1.3 传动方案设计
排种装置和导种装置需保持同步同速运转,传动方案示意图如图4所示。驱动链轮、导种链轮与配套传动链组成一级链传动,导种链轮、排种链轮与配套传动链组成二级链传动。驱动装置在田园管理机的牵引下通过一级链传动将动力传递到导种装置,导种装置通过二级链传动将动力传递到排种装置,主要动力传递方式为链传动,总传动比i计算公式[20]为

图4 窄行密植西洋参精密播种机传动方案示意图Fig.4 Transmission scheme diagram of narrow-row-dense-planting precision planter for American ginseng1.驱动装置 2.驱动链轮 3.导种装置 4.导种链轮 5.排种装置 6.排种链轮

(1)
式中L——播种粒距,mm
N——径向型孔数
Dq——驱动装置直径,mm
δ——滑移系数
i1——驱动装置与导种装置传动比
i2——导种装置与排种装置传动比,取1
Z1——驱动链轮齿数
Z2——导种链轮齿数
Z3——排种链轮齿数
由式(1)可知,播种粒距与驱动装置直径、总传动比、径向型孔数和滑移系数有关,可通过改变驱动链轮齿数,改变驱动装置与导种装置传动比,实现总传动比改变,从而调整播种粒距。驱动装置为栅格滚筒,直径为250 mm;滑移系数一般为0.05~0.12,取0.08[21];播种粒距为100 mm;径向型孔数为6,可求得总传动比为0.71。根据总传动比与整机质量,选定链轮型号为08B,各链轮齿数为:Z1=30,Z2=Z3=21。
排种装置的转动由驱动装置通过两级链传动带动,而驱动装置由田园管理机牵引,所以在总传动比确定情况下,播种机前进速度决定排种装置转速,排种转速需保持一定范围,因此播种作业时必须严格控制播种机前进速度[22],可得
(2)
式中vm——播种机前进速度,m/s
ωq——驱动装置角速度,rad/s
ωp——排种装置角速度,rad/s
np——排种装置转速,r/min
联立式(1)、(2)可知,播种机前进速度与排种装置转速的关系为
(3)
前期研究可知,排种装置转速为12~18 r/min时,可获得相对较优的排种性能[3],代入各参数得对应的播种机前进速度为0.10~0.15 m/s,与选用的小型田园管理机作业速度相匹配。
2 行星轮点播式全约束导种装置设计
2.1 结构与工作原理
采用行星轮系工作原理的行星轮点播式全约束导种装置,主要由导种圆盘、固定轴、惰轮轴、行星轮轴、导种链轮、插播器、投种控制凸轮和支撑座等组成,工作分为卸种导种衔接、运种、投种和过渡4个过程,其结构如图5所示。

图5 导种装置结构简图Fig.5 Schematics of seed guiding device1.支撑座 2.导种链轮 3.导种圆盘 4.固定轴 5.行星轮轴 6.插播器 7.投种控制凸轮 8.惰轮轴
导种装置为对称结构,左右各一个导种圆盘,均由圆盘封盖、行星轮盘(行星架)和行星轮系组成,圆盘封盖和行星轮盘通过螺钉封闭连接,内部布置包含1个太阳轮、3个惰轮和6个行星轮的行星轮系;太阳轮与行星轮齿数相同,惰轮和行星轮均绕太阳轮轴心圆周均布;左右两侧的太阳轮由1根固定轴刚性连接,固定轴两端通过外侧支撑座固定不动,固定轴上通过螺钉轴向均布16个投种控制凸轮;左右两侧的3个惰轮分别与惰轮轴刚性连接,通过轴承安装在行星轮盘上;左右两侧的6组行星轮由6根行星轮轴刚性连接,通过轴承安装在行星轮盘上,每根行星轮轴上通过螺钉轴向均布与排种针对应的插播器。
导种装置工作时,固定轴与太阳轮固定不动,导种链轮带动导种圆盘整体逆时针旋转,带动惰轮和行星轮围绕太阳轮自转和公转;在行星轮系各齿轮相互啮合下,惰轮自转方向与导种圆盘转动方向相同,行星轮自转方向与导种圆盘转动方向相反且大小相等,从而行星轮和行星轮轴自转和公转相抵消,转速为0。行星轮系传动简图如图6所示。

图6 行星轮系传动简图Fig.6 Transmission diagram of planetary gear train1.太阳轮 2.惰轮 3.行星轮
2.2 行星轮系设计
为防止齿轮啮合过程发生根切,直齿圆柱齿轮齿数通常大于17[23]。根据设计要求,太阳轮、惰轮、行星轮齿数z1、z2、z3应满足:z1=z3≤z2,且满足同心、均布与邻接要求。根据导种圆盘整体质量、配合及传动要求,且相互啮合齿轮模数、压力角必须相等,选定齿厚为10 mm、模数为2 mm、压力角为20°的直齿圆柱齿轮,各齿轮齿数为:z1=z3=21,z2=39。
根据图6几何关系分析可确定中心距与各齿轮参数间的关系为
(4)
式中M——齿轮模数,mm
R1——惰轮轴轴心与固定轴轴心距离,mm
R2——行星轮轴轴心与固定轴轴心距离,mm
R3——行星轮盘外壁沿半径,mm
将各齿轮参数代入式(4)可得R1=60 mm,R2=104 mm,R3>125 mm,考虑必要的装配间隙、减轻质量及行星轮盘外壁强度要求,确定行星轮盘外壁沿半径R3=130 mm。
根据周转轮系传动比可得
(5)
ω1——太阳轮角速度,rad/s
ω2——惰轮角速度,rad/s
ω3——行星轮角速度,rad/s
ωH——行星架角速度,rad/s

i2H——惰轮和行星架传动比
由式(5)可知行星轮系各齿轮转速为n1=n3=0,n2=30.77 r/min。
假设行星架转速为nH,由于惰轮和行星轮在导种圆盘的作用下公转转速为nH,可知惰轮自转转速为30.77-nH,方向与导种圆盘转向相同;行星轮自转转速为nH,方向与导种圆盘转向相反,自转与公转相互抵消,转速为0,满足设计要求。
2.3 插播器设计
插播器可完成接种、运种、成穴和投种4个环节,主要由固定端、活动端和弹簧3部分组成。插播器固定端通过螺钉固定在行星轮轴上,活动端通过轴销与固定端连接,活动端上端设有滚轮,固定端与活动端形成接种口。种子从排种针型孔处卸种,投入插播器内,完成接种。在接种和运种环节,插播器活动端与固定端在弹簧的作用下始终保持闭合状态;在成穴和投种环节,插播器活动端在投种控制凸轮作用下绕轴销转动,快速打开,完成投种;插播器尖端离开土壤后,插播器在弹簧力作用下恢复闭合状态。插播器接种口尺寸与排种装置卸种过程种子水平位移有关,为保证插播器顺利接种,需开展卸种过程种子运动规律和轨迹研究,为插播器结构与尺寸设计提供依据。
2.3.1卸种过程运动分析
排种针型孔处种子运动轨迹为圆形,与气力滚筒式排种器工作原理相似。假设西洋参种子为尺寸均匀且受力作用于质心的刚性球体,排种针型孔处吸附面附近气流稳定,卸种瞬间种子力学分析如图7所示。

图7 卸种瞬间种子力学分析Fig.7 Seed force analysis of unloading moment progress
卸种瞬间种子应满足的力学方程为
(6)
其中
(7)
式中FQ——卸种瞬间种子所受压差作用力,N
k——各因素比例系数,取0.35~1.55
Δp——卸种瞬间排种针型孔处内外压差,Pa
dx——排种针型孔处吸附面直径,0.003 m
FC——种子所受离心力,N
Ff——种子受到排种针的摩擦力,N
FN——种子受到排种针的支持力,N
θ——卸种角,(°)
φ——种子与排种针的滑动摩擦角,取36.72°
Rp——排种针型孔处种子运动圆半径,0.175 m
m——种子质量,kg
G——种子自身重力,N
an——法向加速度,m/s2
联立式(6)、(7)可得卸种瞬间种子法向加速度为
(8)
由式(8)可得,卸种瞬间种子法向加速度与种子所受压差作用力、排种转速、卸种角等因素相关。假设卸种瞬间种子法向初速度为v,则卸种瞬间种子水平和竖直方向速度为
(9)
简化卸种过程受力,假设卸种瞬间种子所受排种针的支持力、摩擦力、离心力和压差作用力瞬间消失,忽略种子脱离排种针时间差,种子受自身重力和空气阻力投入插播器内,因西洋参种子粒径较小且速度较小,可忽略空气阻力,卸种过程种子运动学方程为
(10)
式中Lx、Ly——卸种过程种子在水平和竖直方向运动距离,m
t1——卸种过程种子运动时间,s
联立式(9)、(10)可得

(11)
由式(11)可知,卸种过程运动轨迹与排种转速、卸种角、排种针型孔处种子运动圆半径等因素相关。在卸种正压区位置和排种针型孔处种子运动圆半径确定的情况下,卸种角与卸种正压有关,则卸种过程运动轨迹主要与排种转速和卸种正压有关,可分为3种:当卸种正压相对值较大时,即vcosθ>ωpRpsinθ,运动轨迹背离种子运动圆切向方向,为正向卸种;当排种转速和卸种正压匹配时,即vcosθ=ωpRpsinθ,种子水平方向速度相互抵消,运动轨迹竖直向下,为直线卸种;当排种转速相对值较大时,即vcosθ<ωpRpsinθ,运动轨迹偏向种子运动圆切向方向,为反向卸种。
2.3.2卸种过程高速摄影分析
由卸种过程运动分析可知,卸种过程运动轨迹与排种转速、卸种正压有关。为观测排种转速和卸种正压对卸种过程种子迁移轨迹与水平位移的影响,根据文献[3]并配合各因素可控范围,确定吸种负压为固定值-4.5 kPa,排种转速为12~18 r/min,卸种正压为2.5~3.5 kPa,采用二因素三水平试验方法进行高速摄影试验,试验因素水平如表2所示。

表2 试验因素水平Tab.2 Factors and levels of experiment
试验材料选用威海文登催芽裂口西洋参种子,试验装置如图8所示,主要由气力针式精密集排器、美国Vision Research公司Phantom系列高速摄像仪、风机、U型压差计(量程5 kPa)、计算机、Visico LED光源等组成。为方便拍摄和后续分析,选定集排器最外侧一行为拍摄对象,采用10 mm×10 mm标准方格坐标纸为拍摄背景。

图8 高速摄影试验装置Fig.8 Experiment device of high-speed photography1.高速摄像仪 2.风机 3.U型压差计 4.电机 5.气力针式精密集排器 6.坐标纸 7.计算机 8.LED光源
设置高速摄像仪拍摄速度为100 f/s(即相邻两帧时间间隔为0.01 s)、像素分辨率为2 048像素×1 952像素、曝光时间为100 μs,调节光源位置、拍摄距离和角度并校正相机光圈和焦距至画面清晰端正。调整试验参数至指定值,启动高速摄像仪并设置录制时间,每组试验工况拍摄100粒种子,保存图像和视频文件至计算机端[24-25]。在高速摄影图像处理软件Phantom Camera Control Application图像界面建立坐标系如图9所示,设点O位置为坐标原点,将长度单位设置为mm,角度单位设置为(°),通过Calibration(校准)功能校准当前视频单位像素代表的实际长度。

图9 高速摄影质心点坐标标记Fig.9 Centroid coordinate mark by high-speed photography
在排种转速为12 r/min和卸种正压为3.5 kPa(图10a),以及排种转速为18 r/min和卸种正压为2.5 kPa(图10b)两种工况(理论极限运动轨迹)下随机选取1粒西洋参种子提取每帧瞬时高速摄影图像(共10幅),为便于观察,将种子标红处理。由图10可看出,当下落至坐标系70 mm处,即下落高度约55 mm,图10a水平位移为正(正向卸种),图10b水平位移为负(反向卸种)。

图10 卸种过程瞬时高速摄影图像Fig.10 Instantaneous high-speed photography images of seed unloading process
受西洋参种子尺寸、形态、吸附姿态差异及质心提取误差等因素影响,同工况下不同种子卸种轨迹曲线呈现出在一定范围内波动,统计各工况下拍摄的100粒西洋参种子下落至坐标系70 mm处时水平位移,绘制折线概率分布图[26]如图11所示。

图11 拍摄结果折线概率分布Fig.11 Broken line probability distributions of resulting pictures
由图11可知,相同卸种正压条件下,随排种转速的增加水平位移向负方向移动,但移动的幅度并不大;相同排种转速条件下,随卸种正压的增加水平位移向正方向移动,移动的幅度较大;如图11a所示,当卸种正压为2.5 kPa时,水平位移主要集中分布在-10~0 mm间,为反向卸种;如图11b所示,当卸种正压为3.0 kPa时,水平位移主要集中分布在-5~5 mm间,可实现直线卸种;如图11c所示,当卸种正压为3.5 kPa时,水平位移主要集中分布在0~10 mm间,为正向卸种。
当吸种负压为-4.5 kPa、排种转速为12~18 r/min、卸种正压为2.5~3.5 kPa、下落高度为0~55 mm时,前后方向水平位移主要集中分布在±10 mm以内,因此,插播器接种口前后方向开度应大于20 mm;卸种过程种子左右方向无作用力,左右方向水平位移可忽略,插播器接种口左右方向开度根据西洋参种子形状尺寸确定,应大于10 mm。综合考虑,确定插播器接种口尺寸为12 mm×28 mm,保证有足够的空间使西洋参种子顺利投入插播器,增大卸种导种衔接过程可接受区域。
2.3.3插播器结构尺寸设计
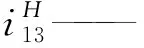
为保证卸种导种衔接过程种子能顺利投入导种装置插播器内,需要确定排种装置与导种装置的位置关系。根据卸种瞬间排种针型孔与插播器接种口中心应位于同一垂线上的位置要求,确定排种导种位置关系如图12所示。导种装置插播器最外端运动圆直径为208 mm,与充种室不存在运动干涉,排种装置和导种装置圆心点水平与竖直距离分别为296、96 mm。
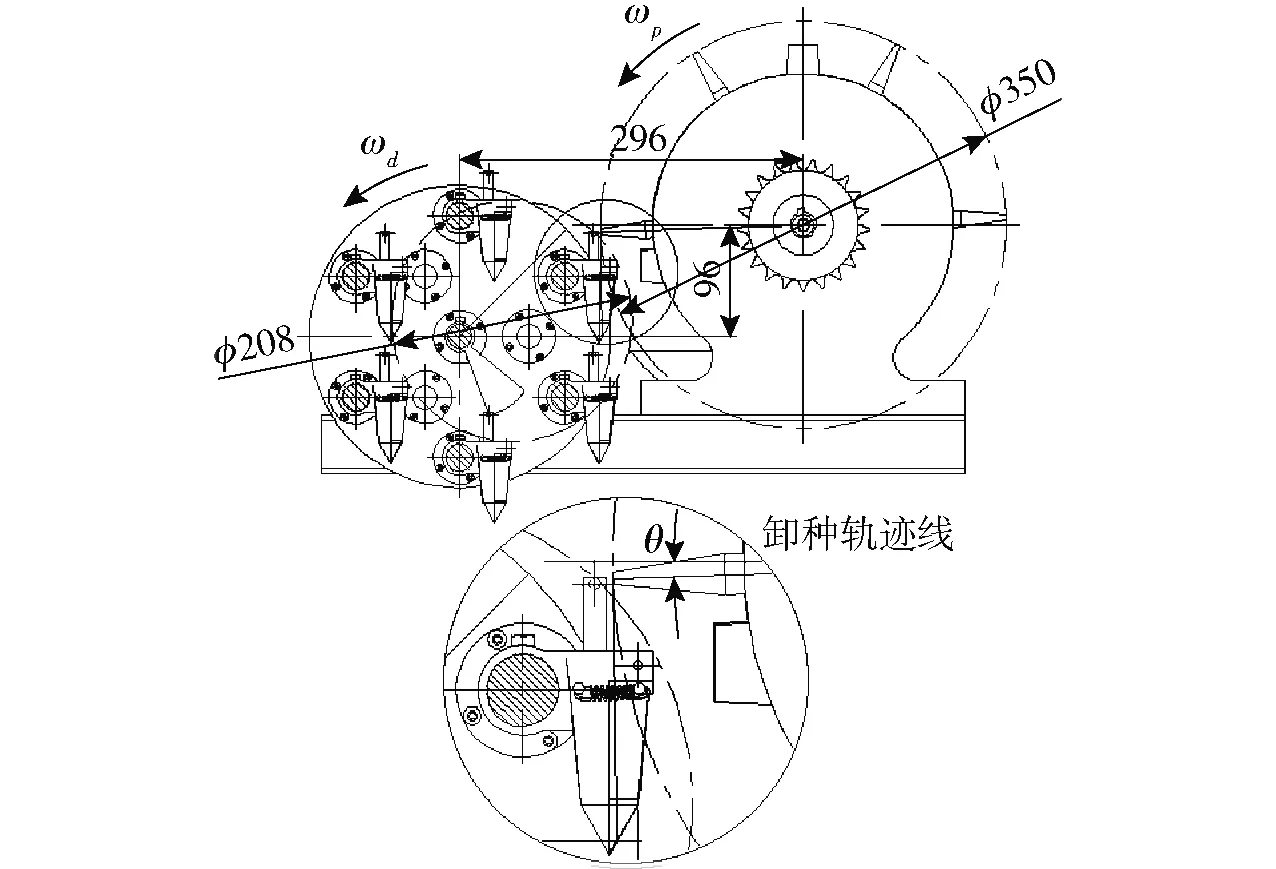
图12 排种导种装置位置关系图Fig.12 Position relation diagram of seed metering and seed guiding devices
导种装置为旋转运动机构,在整个周期内运动状态复杂,必须保证各部件不存在相互运动干涉问题。如图12所示,卸种导种衔接过程,排种针与插播器回转运动存在运动干涉区域,插播器活动端侧面开有12 mm×24 mm的排种针避让口。因插播器尺寸受播种深度、弹簧安装位置和插播器在导种装置相对位置的限制,综合考虑,设计插播器整体尺寸为60 mm×20 mm×95 mm;西洋参播深约为20 mm,因此设计插播器尖端高度为18 mm,结构如图13所示。

图13 插播器结构简图Fig.13 Schematics of inserting apparatus1.固定端 2.弹簧 3.活动端 4.轴销 5.滚轮
2.4 投种控制凸轮设计
投种控制凸轮的间歇运动可完成在合适的位置与插播器活动端滚轮接触,使其开启至最大开启角后保持开启状态,完成投种作业;插播器旋转至尖端离开土壤后闭合,减少了对土壤的扰动且不易被土壤堵塞,整个过程是连续的。投种控制凸轮的轮廓曲线和安装位置直接影响插播器开闭时间、开闭速率及开启大小,研究导种过程运动规律,确定合适的插播器运动规律是设计合理凸轮轮廓曲线的关键[27]。
2.4.1导种过程运动分析
导种装置径向间隔60°均布6组插播器,各组插播器结构及运动特性相同,取其中1组插播器尖端点B进行运动分析。以固定轴轴心为坐标原点,以播种机前进方向为X轴正方向,以过原点垂直向上为Y轴正方向,建立如图14所示直角坐标系XOY,设t=0时,选取的插播器所在的行星轮轴轴心与Y轴正方向重合。插播器尖端点B运动轨迹方程为

图14 插播器尖端运动轨迹Fig.14 Trajectory of inserting apparatus’s tip
(12)
式中xB、yB——插播器尖端点B在t2时刻轨迹坐标值,m
ωd——导种装置角速度,rad/s
t2——导种装置运动时间,s
Δx、Δh——行星轮轴轴心与插播器尖端水平和竖直距离,m
插播器尖端点B在X、Y轴方向速度分量为
(13)
则插播器尖端点B绝对速度为
(14)
插播器尖端点B的运动轨迹随速比系数λ的不同而有所差异,速比系数计算式为
(15)
式中nd——导种装置转速,r/min
由式(15)可知,导种运动轨迹主要与导种装置转速、播种机前进速度和行星轮轴轴心与固定轴轴心距离等因素相关,在行星轮轴轴心与固定轴轴心距离和插播频率确定的情况下,λ主要取决于播种机前进速度。其中,行星轮轴轴心与固定轴轴心距离为0.104 m,取导种装置转速为15 r/min,播种机前进速度为0.15 m/s,计算可知λ=1.09>1,即插播器尖端绝对运动轨迹为余摆线[28],如图14所示。

2.4.2导种过程仿真分析
为探究插播器运动规律和导种装置低位零速投种条件,利用三维建模软件UG建立导种装置三维实体模型,添加约束建立虚拟装配模型并导入虚拟样机仿真分析软件ADAMS中进行运动仿真分析,设置水平移速为0.15 m/s,运动循环周期为4 s,即导种装置转速为15 r/min,插播器尖端点B仿真运动轨迹(P1P2P3P4)和速度与加速度曲线如图15所示。

图15 插播器尖端仿真轨迹和速度与加速度曲线Fig.15 Simulation trajectory and velocity and acceleration curves of inserting apparatus’s tip
由图15可知,一个运动循环周期可分为3个轨迹段:P1P2段:插播器从初始相位角0°转到160°,此阶段插播器处于下降段成穴,速度由最大值R2ωd+vm逐渐减小至0。P2P3段:插播器从相位角160°转到200°,此阶段插播器下降至最低点后上升,速度由0逐渐减小至最小值R2ωd-vm后逐渐增大至0,此阶段速度接近0且处于低位,在此阶段可基本保证低位零速投种。P3P4段:插播器从相位角200°转到360°,此阶段插播器处于上升段出穴,速度由0逐渐增大至最大值R2ωd+vm,进入下一运动循环周期。
一个运动循环周期内存在2个速度为零的下降段点P2和上升段点P3,分别位于运动轨迹最低点环扣两侧最大横弦处。若忽略插播器开启至种子落入种穴时间差,当插播器在下降段点P2投种时,插播器开启过程向下运动,会造成插播器充土堵塞;当插播器在上升段点P3投种时,插播器开启过程向上运动,种子受重力作用落入种穴,可最大程度降低插播器堵塞和种子与种穴的弹跳滑移。
综合分析仿真轨迹和速度与加速度曲线,仿真轨迹为余摆线,与理论轨迹基本一致,导种装置可满足平稳导种要求,初步验证了该装置理论设计的合理性。导种装置低位零速投种条件为:运动轨迹为余摆线,即λ>1;插播器在运动最低点处与投种控制凸轮开始接触,上升段点P3处完成投种;插播器尖端在运动到最低点位置应低于起垄面一定的高度,即播种深度。
2.4.3投种控制凸轮轮廓设计
插播器在运动最低点处,投种控制凸轮与活动端开始接触,以逆时针方向为正,以圆心O到开启段点a的连线为起始线Oa,圆心O到投种控制凸轮轮廓曲线上任意点连线与Oa夹角定义为投种控制凸轮转角α,插播器固定端与活动端夹角定义为插播器摆角ψ。
投种控制凸轮轮廓设计采用反转法,假设插播器固定在最低点位置,投种控制凸轮以-ωd顺时针转动,设计原理为摆动从动件凸轮机构。根据设计要求,α与ψ最大值分别设计为30°与10°,投种控制凸轮轮廓曲线设计为推程段(推程角α1为0°~14°)、远休止段(远休止角α2为14°~26°)、回程段(回程角α3为26°~30°)和近休止段(近休止角α4为30°~360°),如图16a所示。为避免运动干涉且插播器可在无外力作用下由弹簧力保持闭合,将投种控制凸轮基圆部分(近休止段)去除。

图16 投种控制凸轮轮廓设计示意图Fig.16 Outline design sketch of dropping control cam
根据运动规律关系图,采用图解法,将活动端滚轮中心位置分布点拟合为光滑曲线,即投种控制凸轮理论廓线,根据滚轮半径,作出滚轮圆族包络线,即投种控制凸轮实际廓线,投种控制凸轮轮廓曲线示意图如图16b所示。其中,a为插播器闭合状态结束点及开启过程开始点,b为插播器开启过程结束点及开启状态保持点,c为插播器开启状态结束点及闭合过程开始点,d为插播器闭合过程结束点。投种控制凸轮通过螺钉轴向固定在固定轴上,安装位置为第四象限,与竖直方向夹角为20°。
3 播种机性能试验
3.1 试验材料与方法
为验证窄行密植西洋参精密播种机播种作业效果,于2021年7月在武汉市农业科学院设施蔬菜试验基地开展田间播种试验,土壤类型为沙壤土,含水率为14.75%、坚实度为261.96 kPa,播种作业前对地块旋耕碎土整地处理;试验对象选用威海文登催芽裂口西洋参种子,千粒质量为53.26 g,含水率为37.90%,外形尺寸(长×宽×高)平均值为6.24 mm×5.04 mm×3.35 mm,几何平均宽度为4.72 mm;试验机具为窄行密植西洋参精密播种机,为方便测量数据,将覆土板拆卸,吸种负压设定为-4.5 kPa,卸种正压设定为3.0 kPa,作业速度设定为0.54 km/h,理论播种粒距100 mm,播种3垄。
播种作业后随机选取每垄的6行作为测量对象,共测量18组试验数据,每组数据随机统计中间段工作稳定区域(前后各留5 m启停距离)连续50种穴内种子粒数并测量种穴距离和播种深度,测量工具为直角钢尺(量程 200 mm和1 000 mm)、卷尺(量程5 000 mm)与纤维皮尺(量程20 000 mm)等,作业过程如图17a所示,播种效果如图17b所示。

图17 田间试验Fig.17 Field experiment pictures
由于目前我国尚没有关于西洋参播种设备技术检测的国家标准,参照国家标准GB/T 6973—2005《单粒(精密)播种机试验方法》、农业行业标准NY/T 503—2015《单粒(精密)播种机作业质量》以及农业行业标准NY/T 987—2006《铺膜穴播机作业质量》的试验方法和评价指标,主要指标为穴粒数合格率(1粒/穴占比)、重播率(大于1粒/穴占比)、空穴率(0粒/穴或未成穴占比)、播深合格率(理论播深±5 mm占比)和穴距合格率(理论穴距±15 mm占比),根据测量结果,取平均值,计算各项试验评价指标结果。
3.2 试验结果与分析
田间试验结果表明,样机播种效果良好,行株距播深均匀,穴粒数合格率为86.2%,重播率为4.4%,空穴率为9.4%,播深合格率为92.8%,穴距合格率为93.9%,平均播深为19.71 mm,平均穴距为103.5 mm,各项试验评价指标均达到设计要求和相关标准要求,满足西洋参精密播种要求。
空穴产生的主要原因有:排种针存在吸种过程漏吸、携种过程种子脱落等原因,导致卸种过程无种子现象;卸种导种衔接失败,种子提前掉落在垄面土壤,后续种穴内无种子。
重播产生的主要原因为:排种针吸种过程吸附多粒种子,顺利携种至卸种区,插播器顺利接种、运种并成穴投种;另外观察到漏播后间隔5穴出现重播的现象2次,未观察到3粒/穴重播的现象,分析可能原因为:前续插播器投种失败,后续接种成功,导致插播器内存在2粒种子,顺利运种并成穴投种。
4 结论
(1)设计了一种窄行密植西洋参精密播种机,可一次完成起垄、精密排种、平稳导种和覆土等作业,阐述了播种机和排种装置结构原理,设计了整机传动方案。基于行星轮系运动原理,重点设计了行星轮点播式全约束导种装置,阐述了其结构原理,通过机构分析确定了行星轮系的结构参数。
(2)通过卸种过程理论分析和高速摄影试验,明确了卸种轨迹影响因素和卸种水平位移,结果表明,当吸种负压为-4.5 kPa、排种转速为12~18 r/min、卸种正压为2.5~3.5 kPa时,前后方向水平位移主要集中分布在±10 mm以内,确定插播器接种口尺寸为12 mm×28 mm;当卸种正压为3.0 kPa、排种转速为12~18 r/min时均可实现直线卸种,确定合适卸种正压为3.0 kPa。通过导种轨迹理论与仿真分析,明确了插播器运动规律和低位零速投种条件,基于反转法设计了投种控制凸轮轮廓。
(3)田间试验表明,当吸种负压为-4.5 kPa、卸种正压为3.0 kPa、作业速度为0.54 km/h时,设计的播种机穴粒数合格率为86.2%,重播率为4.4%,空穴率为9.4%,播深合格率为92.8%,穴距合格率为93.9%,平均播深为19.71 mm,平均穴距为103.5 mm,满足西洋参精密播种农艺要求。
猜你喜欢
卫星电视与宽带多媒体(2021年5期)2021-05-27 12:58:03
今日农业(2020年22期)2020-12-14 16:45:58
金桥(2020年7期)2020-08-13 03:07:02
文萃报·周五版(2020年24期)2020-06-22 13:02:38
家庭医学(下半月)(2020年3期)2020-05-30 12:41:58
基层中医药(2018年1期)2018-03-01 07:36:10
雷锋(2016年4期)2016-05-30 02:09:48
西部广播电视(2015年3期)2016-01-15 02:05:43
学习月刊(2015年10期)2015-07-09 03:35:12
中文信息(2014年10期)2014-09-15 05:19:44
