
基于海面场景感知的红外小目标检测方法
2022-02-15 11:52朱勇肖沁李正周刘国金秦天奇
光子学报 2022年12期
朱勇,肖沁,李正周,刘国金,秦天奇
(1 重庆大学 微电子与通信工程学院,重庆 400044)
(2 四川航天电子设备研究所,成都 610100)
0 引言
海面远距离红外目标是典型的小弱信号,缺乏纹理和结构等有效信息。在逆光条件下,红外成像往往具有密集鱼鳞波、高强度海面亮带等强动态背景杂波。再则,海面中的岛屿、岛岸变现为红外图像中高亮度背景。因此,红外目标常常表现为淹没于强背景杂波中弱小目标信号。有效提高海面复杂背景下小目标检测性能和压制杂波干扰虚警极具挑战性,是目标检测识别领域的难点和热点问题。
先跟踪后检测(Track Before Detect,TBD)和先检测后跟踪(Detect Before Track,DBT)是检测小弱目标的两种主要策略。TBD 算法假设背景杂波为时空不相关的高斯白噪声,利用轨迹连续性进行多帧关联识别目标信号。然而,鱼鳞波、海面亮带杂波不满足高斯白噪声模型,TBD 检测小弱目标出现大量虚警。DBT 算法首先白化处理红外图像,对超过门限判断的测量点再进行多帧关联来检测红外小弱目标,主要有背景预测、目标稀疏重构、基于深度学习算法和基于人类视觉注意系统(Human Visual System,HVS)算法等四种。形态学顶帽变换(Top-hat)[1]、最大中值滤波(Max-median)[2]、二维最小均方滤波器(Two Dimensional Least Mean Square Filter,TDLMS)[3-4]是常见的背景预测算法,对背景平稳、强度均匀的平稳海区效果较好,但对于边缘性强、非平稳的鱼鳞波估计能力较差,杂波抑制存在大量残留。目标稀疏重构方法将小目标和背景分别视作稀疏分量和低秩分量,如红外块图像(Infrared Patch-image,IPI)模型[5]、加权图像块张量(Reweighted Infrared Patch-tensor Model,RIPT)模型[6]、部分张量核范数和(Partial Sum of Tensor Nuclear Norm,PSTNN)[7]和局部对比先验低秩(Low Rank Model with Local Contrast Prior,LRMLCP)模型[8]等。然而,不仅重构稀疏矩阵分量和低秩矩阵分量的难度大,而且当杂波强度波动范围大且纹理复杂时会出现目标信号与高亮干扰混杂,导致检测性能降低。基于深度学习的目标检测方法发展迅速,如注意局部对比网络(Attentional Local Contrast Network,ALCNet)[9]、由目标提取模块和语义约束模块组成的TBCNet[10]、融合视觉显著性的全卷积神经网络(Full Convolutional Neural Network and Visual Saliency,VS-FCNN)[11]等,其检测性能主要取决于训练样本和特征提取,在某些应用场景甚至表现出较传统方法更强的适应能力。然而,由于计算资源和训练样本获取等条件的限制,基于深度学习的小目标检测算法难以部署和实现,发展相对缓慢,因此本文研究传统算法来提高小目标检测的性能,仍具有重要的意思。基于HVS 算法利用视觉显著选择性快速捕捉到与背景具有较大差异的感兴趣区域,如局部对比度测量(Local Contrast Measure,LCM)[12]、三层局部对比度测量(Tri-layer Local Contrast Measure,TLLCM)[13]、平均绝对灰度差(Average Absolute Gray Difference,AAGD)[14]、绝对方向平均差(Absolute Directional Mean Difference,ADMD)[15],有目的地突出真实目标的同时降低噪声干扰。然而,鱼鳞波和高亮度海面亮带边缘往往也符合高局部对比度特性,导致目标与虚警常常混淆在一起,虚警率增高的同时也会造成目标漏检,场景适应性较差。
近年来,利用区域场景信息提升小弱目标检测性能也逐渐成为共识和重要研究方向,即在估计和划分背景区域的基础上采用不同信号处理方法进行针对性的目标检测,比如,在提取海天线的基础上依次将背景分为天空区、海天区和海区。针对海天区红外小目标,区域自适应杂波抑制[16]利用多级滤波对海天区背景抑制;峰值局部奇点和高斯差分联合(Peak Local Singularity and Difference of Gaussian,PLSDG)[17]利用峰值局部奇点判决目标;互小波能量组合(Mutual Wavelet Energy Combination,MWEC)[18]采用灰度侵蚀形态滤波抑制海天区背景。然而,这些方法对海天背景杂波分区和信号处理方法较为粗糙,区域自适应杂波抑制[16]未对海区目标检测,导致漏检;PLSDG[17]未感知海面复杂程度,对海区只采用高斯差分滤波器,会在具有尖锐边缘的海面亮带处产生较多的虚警;MWEC[18]不但人为划分海区,还难以抑制起伏不定的鱼鳞波。
针对以上场景感知和目标检测方法存在的不足,本文通过感知非平稳海面背景杂波组成成份存在的区域及起伏状态,通过构建海面场景信息来采取与背景杂波相适应的信号处理方法精细检测小目标,之后将各个区域检测结果归一化到同一强度范围并整合得到小目标检测结果。
1 海面场景感知区域提取方法
远距离目标可能存在于海天区、岛屿区和海面区,感知出各类海陆杂波可能存在的区域是采取针对性方法抑制背景的基础。图1 为本文海面小目标检测算法计算流程。
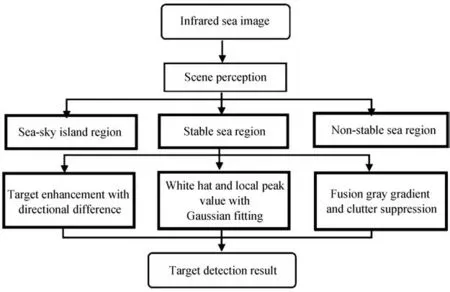
图1 检测算法流程Fig.1 Diagram of detection method
1.1 海天线提取方法
海天线分隔了天空和海面,是非常重要空间位置信息。海天线往往表现为一条较为粗厚的直线段,但因背景会出现不连续甚至扭曲部分。本文采用基于结构张量二进制大特征值和Hough 变换的自动地平线检测方法来检测海天线。利用结构张量将局部梯度转化为可感知粗厚边缘特性的大特征值图。红外图像I的结构张量ST定义为
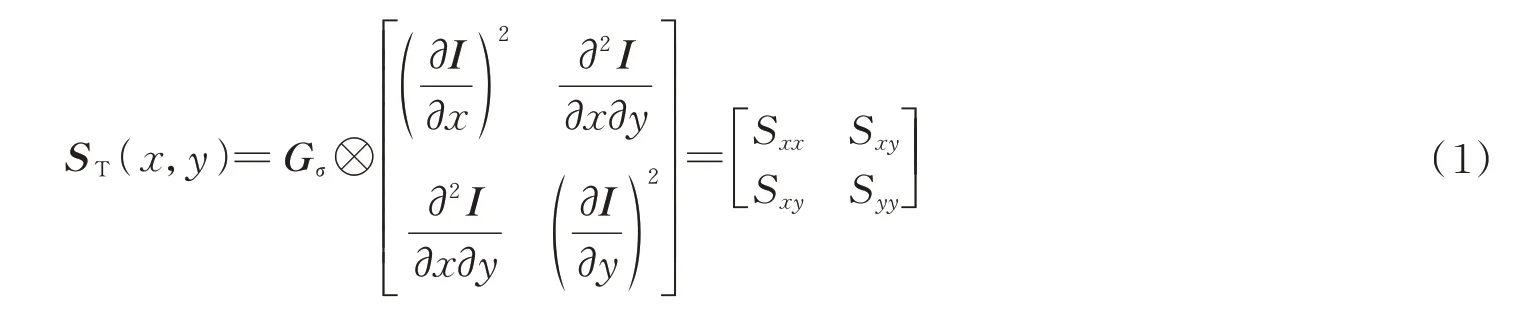
式中,Gσ为标准差σ的高斯滤波器,⊗为卷积算子,I为红外图像,∂I/∂x和∂I/∂y分别为在x,y方向上的偏导数。结构张量ST的两个特征值具有不同含义,大特征值表征了局部图像区域内梯度方向的主导趋势和相干程度,可以较好地刻画粗而不平的边缘并忽略细小琐碎的细节;而小特征值用于定位角度对粗厚的边缘贡献不大。大特征值和小特征值的分别定义为

将结构张量大特征值归一化到[0,1]范围并进一步求出简单有效的边缘检测器结构张量二进制大特征值BS,其定义为

海天线近似认为是BS图上最长的粗直线,并且往往贯穿整张图像。以图像水平向右为x的正方向、竖直向下为y的正方向建立坐标轴,在x-y平面上拟合海天线,即

式中,k、b分别为海天线所在直线的斜率和截距,θ是海天线法线与y轴的夹角,ρ为坐标中心,即图像左上角到海天线的距离,这些参数对应的海天线描述为图2(a)。将BS图中坐标为(x,y)的每个边缘像素点映射为(θ,ρ)所表示的Hough 空间中一条正弦参数曲线,映射方法表示为
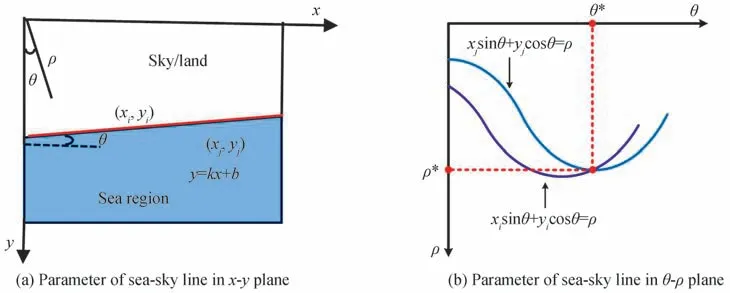
图2 海天线提取的 Hough 变换图Fig.2 Hough transform diagram for sea-sky line extraction

式中,δ(·)为狄拉克函数,W、H分别为红外海洋图像宽和高。如图2(b),Hough 变换是计算二维曲线相交于(θ,ρ)的累加器。在θ-ρ平面上累加数H(θ,ρ)的最大值决定了通过x-y平面上最多边缘点的一条直线的参数,因此,利用最大累加数H*(θ*,ρ*)从经Hough 变换后直线集合中确定出潜在的海天线。图3 为海天线检测示例,该方法能很好地适应有海天岛屿和无海天岛屿的场景。
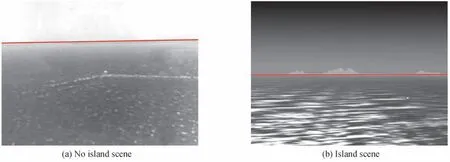
图3 海天线检测示例Fig.3 Sample of sea-sky line detection
1.2 海天岛屿区提取方法
海天区往往是包含海天线在内的一小块固定高度的区域,且其强度与海天线的强度相差较小。运用求解海天线用到的结构张量ST来表征差分特征值DE,其定义为

使用最大类间方差法对DE进行阈值分割,对大于阈值的二值化的差分特征值图进行连通分量标记操作,保留符合以下规则的连通域:

式中,H、W分别为图像的高和宽,α为均衡因子,y0为海天线的纵向位置,Ω为二值化差分特征值图中的连通域。A的最小纵坐标ymin和最大纵坐标ymax之间区域则为海天区位置。
同时,弹载红外成像系统下,远距离的岛屿往往出现在海天线附近。海天区可能存在岛礁杂波,这势必给目标检测造成大量虚警。采用K-means 对海天区进行聚类,海天区最多有天空、岛屿和海面三种,故将聚类中心点数设置为3。图4 为海天线和海天岛屿区感知示例,图4(b)为海天区的岛屿和海面相连聚类结果,再利用海面呈规则的长条分离出岛屿,如图4(c)。因此,该类海天区提取方法不仅能成功分离无岛屿的海天区,还能有效地感知出岛屿的海天区。
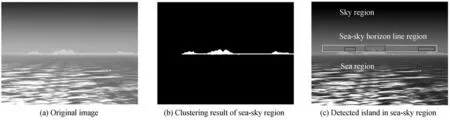
图4 海天岛屿区感知示例Fig.4 A sample of IR sea-sky island region perception
1.3 非平稳海区提取方法
海面既可能有平稳海面,也可能出现起伏波动较大的鱼鳞波、海面亮带等非平稳信号。感知海面起伏状态,分离出平稳海区和波动海区对于小目标检测尤为重要。采用Bernaola-Galavan 分割算法(Bernaola-Galavan Segmentation Algorithm,BGSA)[19]来分离区域,将非平稳序列分为多段具有不同均值且差异较大的相对平稳的区域。
对于海面区域的每个像素,求其垂直方向梯度Gv(x,y)为

式中,参数r1、r2是经验性选择的间隔行数。计算每一行Gv(x,y)在纵向的投影累加和为

梯度累加和GS(y)是一个以纵坐标y为自变量的非平稳曲线。采用BGSA 对GS(y)计算y点左邻域和右邻域的均值,即左子信号集的均值μleft(y)和右子信号集的均值μright(y)以及衡量均值差异的统计量Ty:

式中,SD(y)是y点联合方差,其表达式为

式中,Sleft(y)和Sright(y)分别为左、右子信号集的标准偏差,Nleft(y)和Nright(y)分别为左右两边的点数。计算Ty的最大值Tmax=π 的统计显著性,即

式中,Prob(T≤τ)表示在随机过程中取得T值小于等于τ的概率。p(τ)可以模拟为

式中,γ=4.19lnN-11.54,N为非平稳子序列长度,v=N-2,Δ=0.4,B为不完全β函数。若显著性值超过给定阈值P0(一般P0为0.9~0.95),则在该点将GS(y)分割成两段均值存在显著差异的子序列,而该点是均值突变点。
通过以上处理,非平稳海面梯度信号被分成了具有不同均值的相对平稳子序列。图5 为平稳海区和波动海区共存的海区梯度曲线BGSA 分割结果图,图5(b)中蓝色曲线为GS(y),紫色曲线为BGSA 分割结果。

图5 海区梯度曲线BGSA 分割结果图Fig.5 BGSA segmentation map of gradient curve of sea region
然后,采用方差加权信息熵Vwie表征经过BGSA 分割过的每个海区图像块的复杂度,可表示为

式中,L为最大灰度等级,pg为图像灰度值g的概率,代表图像的均值。

式中,Num为BGSA 分割后的总段区数(k)为第k个段区的梯度累加和均值。
2 海面小目标检测方法
通过场景感知方法构建出海天岛屿区、平稳海区、波动海区等海面场景信息的基础上,进一步采取与背景杂波相适应的信号处理方法精细检测小目标。
2.1 海天岛屿区小目标检测方法
海天岛屿区的海天线和岛屿,尤其是岛屿具有很强的结构性边缘,采用最大中值滤波、最大均值滤波会出现大量背景残差,增加虚警概率和降低检测概率。针对该问题,提出了一种基于方向性差异的目标增强算法(Target Enhancement with Directional Difference,TEDD)。先利用原图I与各向异性扩散结果Ismooth的差值获得局部增强强度图,进而根据目标的各向同性使用八个滤波模板抑制边缘。
各向异性扩散在平滑图像的同时能保持细节,各向异性扩散滤波是一个迭代过程,当区域像素为边缘像素时,扩散减弱,迭代过程为

式中,In经过n次迭代后的结果,迭代次数越大,滤波效果越好,本文实验n取40;γ是四个扩散方向的平衡系数,γ越小,滤波效果越差,本文实验γ为15。∇N,∇S,∇E,∇W是式中北、南、东、西四个方向的梯度算子。CN,CS,CE,CW是热传导系数。
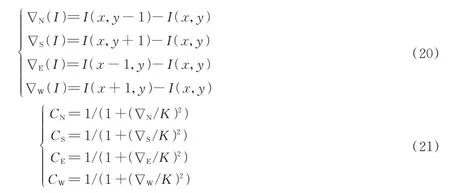
式中,K是热传导系数平衡因子,其值越大图像就越平滑,本文实验K为0.15。
使用一个中心元素为零,其余元素为1 的模板T来对锐化后的图像进行滤波。

式中,IEIM代表了局部增强强度图;T是滤波器,大小为(2n1+1)×(2n1+1);H(·)是阶跃函数。
考虑到目标与背景的梯度指向的差异性,构造了0、π/4、π/2、3π/4、π、5π/4、3π/2、7π/4 等八个方向的定向卷积核来提取方向导数加权的绝对平均差值(Absolute Average Difference weighted by Directional Derivatives,AADDD)[20]。方向滤波模板如图6。

图6 八个方向的定向卷积核Fig.6 Directional convolution kernels at eight direction
方向滤波结果IDF为ID0,ID1,ID2,…,ID7最小值,即

式中,ID0,ID1,ID2,…,ID7是八个卷积核与图像的卷积结果。
基于方向性差异的背景抑制显著图ITEDD表示为最小方向响应加权的局部增强强度滤波结果,即

对显著图ITEDD采用自适应恒虚警阈值分割检测目标,阈值定义为

2.2 平稳海区小目标检测方法
平稳海区的灰度强度起伏性较低,可采用白顶帽(White Top-Hat,WTH)[21]滤波和局部峰值判决。白顶帽变换处理方式为

式中,I°Boi为开运算,⊕和Θ 分别为膨胀和腐蚀操作,结构元素如图7。
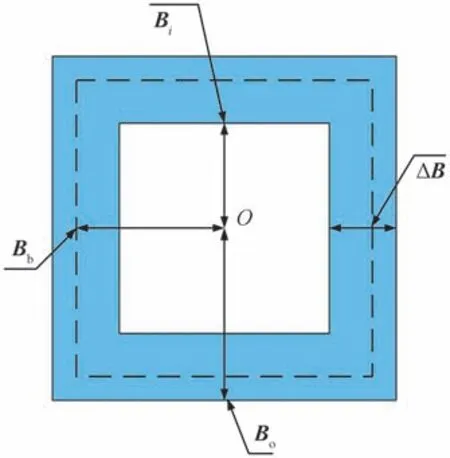
图7 结构元Fig.7 Structural element
对滤波后的信号采用自适应恒虚警阈值Th对WTH(x,y)提取可疑目标,它们可能是真实目标,也可能是虚警。小目标强度分布是近似高斯形状,表现为局部峰值特性。因此,本文采用高斯曲面拟合法提取峰度系数和偏态系数来判断为小目标。小目标二维高斯曲面方程为

式中,Am,(x0,y0),σx和σy分别为高斯函数幅值、高斯曲面中心点、x方向均方差 和y方向均方差。求出Am,σx,σy,x0,y0便可拟合高斯曲面。对式(29)两边取对数可得

将可疑目标邻域半径为5 像素的所有数据I(x,y)作为样本并利用最小二乘求解,使得估计值的残差平方和Q最小,即

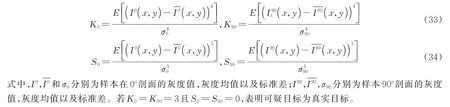
在求解出a,b,c,d,e等变量的基础上,根据式(31)可得拟合曲面的参数σx,σy,x0,y0,Am。沿着拟合的二维高斯曲面的0o和90o剖面,提取这两个一维分布峰度系数K0和K90,以及偏态系数S0和S90,分别表示为
2.3 波动海区小目标检测
波动海区存在大片鱼鳞波、海面亮带,亮度强、边缘突出。根据目标与周围背景在灰度和梯度两个维度的差异性,提出了一种融合灰度梯度算法(Fusion Gray Gradient Clutter Suppression Method,FGGCSM)抑制背景。小目标往往在表现为局部灰度值极大,可采用2D-DoG 算子进行压制同质背景而增强小目标,预处理图像IDog为

式中,σ1和σ2分别为激励参数和抑制参数。
根据式(2)和式(3)计算的两个特征值λlarge和λsmall,当λlarge≈λsmall≈0,表明位于平滑区域;当λlarge≫λsmall≈0,表明为边缘区域;当λlarge≥λsmall>0,所处位置为候选目标点。因此可以利用大特征值和小特征值对2D-DoG 预处理后图像进一步抑制背景。假设是预处理图像的两个特征值,R为结构张量的调和均值,定义为

式中,φ是一个极小趋于0 的整数,用于预防分母为0。由式(37)可知,在均匀背景和边缘处R约等于0,突出增强了目标区域,R具有调和图像对比度能力。
与此同时,小目标形状呈现类似各向同性的高斯模型[22],其梯度方向均匀地分布在各个方向并朝向中心;相反,海杂波边缘的梯度方向是具有一致性,即由高亮度指向低亮度[23]。因此,构造四个方向的滤波模板来模拟目标特定的梯度内指向性,模板如图8,表示为

图8 四个滤波模板Fig.8 Four filter templates
对于给定的坐标(x0,y0),先将以目标为中心的邻域划分为四个象限,在第一、第二、第三、第四象限分别获取四个模板滤波的结果C1、C2、C3和C4,然后计算每个象限区域对应的局部平均梯度幅值Gmi,即

式中,Nsi为所求象限Ci(x,y)大于0 的数量,H(·)是阶跃函数。
由于小目标各向同性,其Gmi之间的差异性不很大;杂波边缘处的梯度指向同一个方向,必会造成其它的平均梯度幅值很小。将各个方向的平均梯度幅值进行两两相乘,并取均值响应作为最终局部梯度度量Flgm,即

综上,调和对比度R增强了小目标局部高亮度特性,而Flgm描述了目标梯度内指向属性。联合两特征则能进一步抑制杂波边缘而增强目标信号:

采用恒虚警阈值对Frsm(x,y)进行分割,提取目标。
3 实验结果与分析
本节分析了用于测试的海面红外小目标图像特性,对比测试验证了基于海面场景感知的红外小目标检测算法性能。
3.1 测试数据集与评价指标
采用弹载红外成像系统获得的6 个复杂海面场景红外小目标序列图像为测试数据集,如图9 所示,红色圆圈标记出目标。图9(a)是位于海天区和起伏海面的小目标。图9(b)是零散的海面亮带和鱼鳞波下的小目标。图9(c)是鱼鳞波中携带强尾浪的小目标。图9(d)表示淹没在大量高亮度鱼鳞波下的小目标。图9(e)是位于岛礁区小目标。图9(f)为位于海天岛屿区和高强度海面亮带区的小目标。
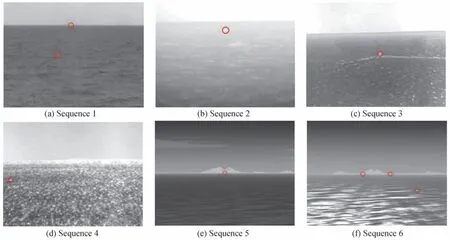
图9 红外测试图像序列的代表帧Fig.9 Representative frames of infrared test image sequences
采用信杂比(Signal-to-Clutter Ration,SCR)[5]来表述目标的检测难易程度。信杂比越小,目标就越弱,目标检测难度越大。局部信杂比的量化规则为

式中,mt为目标区域的平均像素值,mb和σb为目标周围邻域像素值的均值和标准差。表1 为不同目标分组序列的详细信息,各个序列信杂比在[0.25,3]之间。
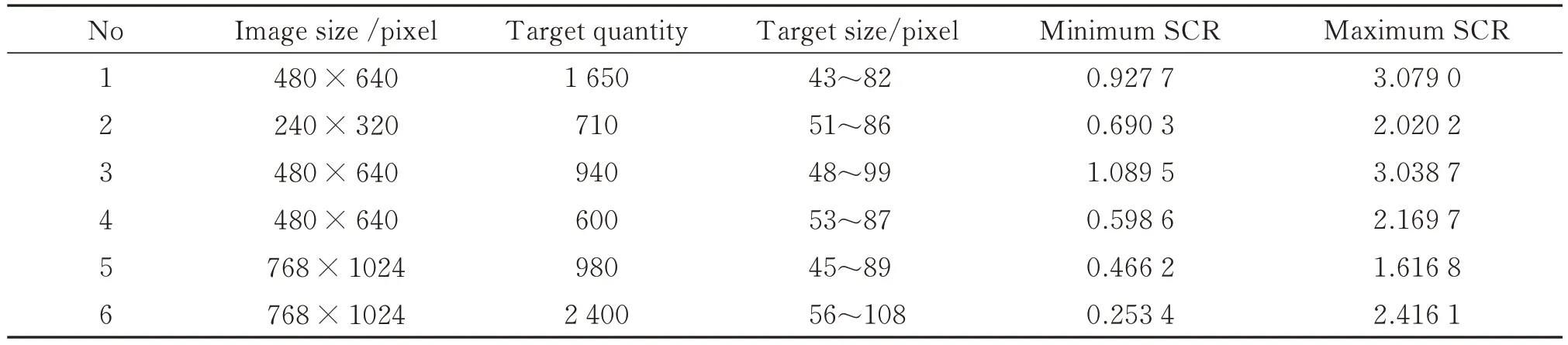
表1 测试数据的详细信息Table 1 Detail information of the test data
采用信杂比增益(Signal-to-Clutter Ration Gain,SCGR)和背景抑制因子(Background Suppression Factor,BSF)来评价背景杂波抑制能力[8,11,18,24],表示为

式中,Scro和Scrf分别为原图和滤波图像的局部SCR 值,σo和σf分别为滤波前后的背景标准差,ε一个小正数,以避免出现分母为0 的情况。Scrg和Bsf越大则背景抑制能力越好,采用平均信杂比增益和平均背景抑制因子来对比序列图像的抑制能力。

式中,Ntarget为目标的数量,Scrg(i)为第i目标所对应的信杂比增益;Nframe为总图像数,Bsf(j)为第j帧图像背景抑制因子。
采用检测率(Detection Rate,DR)和虚警率(False Alarm Rate,FAR)来评估目标检测算法的性能为

式中,Ntp为正确检测出的目标数量,Ntarget为实际目标数量;Pnfp为检测结果中虚假目标的总像素数,Pnimage为测试序列图像的总像素数。计算并画出接收器操作特性(Receiver Operating Characteristic,ROC)曲线,曲线面积越大,算法准确性越高;越靠近坐标左上方,检测目标能力越强。
3.2 参数讨论
1)复杂度阈值Tcmp判断红外海面背景图像是否存在波动海面。设置不同的复杂度阈值,测试对应阈值下非平稳海区的感知性能。图10 为不同复杂度阈值下,场景感知的波动海面图像在测试数据集中的占比与真实波动海面图像在数据集中的占比情况。当Tcmp约为230 时,红色曲线所表示场景感知检测出波动海面图像数量与真实的波动海面图像数量接近。基于该实验结果,Tcmp设置为230。
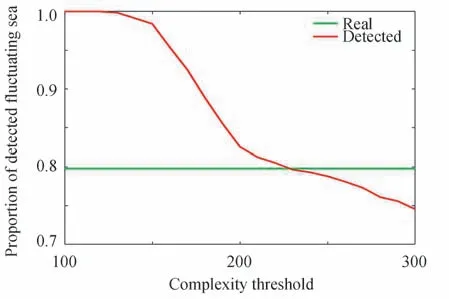
图10 不同复杂度阈值下的检测出波动海面占比Fig.10 Proportion of detected fluctuating sea surface corresponding to different complexity threshold
2)不同锐化模板T的尺寸选择对背景抑制产生影响。为了使基于方向性差异的目标增强算法(TEDD)算法更好应用于海天岛屿区的目标检测,测试不同的模板T的尺寸处理序列1、序列5、序列6 的存在小目标的海天岛屿区。表2 为所选序列海天岛屿区的信杂比增益(SCRG),当尺寸为4 时TEDD 算法取得了较好、较稳定的SCRG。因此,本文海天岛屿采用的TEDD 算法的锐化模板T尺寸设置为4。
表2 不同尺寸处理海天岛屿区的Table 2 of sea-sky island region corresponding to different n1

表2 不同尺寸处理海天岛屿区的Table 2 of sea-sky island region corresponding to different n1
3)融合灰度梯度算法(FGGCS)算法抑制波动海区背景时,邻域半径r会影响背景抑制效果。测试不同邻域半径r取值下的FGGCSM 处理存在波动海区的序列1、序列2、序列3、序列4 和序列6,如表3。当r为3时,FGGCSM 算法取得了较好、较稳定的。因此,本文波动海区采用邻域半径r设置为3。
表3 不同r 处理非平稳海区的Table 3 of non-stationary sea region corresponding to different r

表3 不同r 处理非平稳海区的Table 3 of non-stationary sea region corresponding to different r
3.3 场景感知结果与分析
图11 为6 个测试序列的场景感知结果,其中红色粗线为海天线,绿色标记区域为海天岛屿区,黑色标记区域为岛屿,蓝色粗线标记的位置为波动海面起始位置,它分隔了海面平稳区和海面波动起伏区。若图中无蓝色粗线,则表示该图为全平稳海面。
准确感知出海天线的图像数与单个序列图像总数的比例为海天线检测率;在单个序列图中准确感知出波动海面起始位置的图像数与单个序列图像含有波动海面的图像总数的比例为波动海面识别率;在单个序列图中准确感知出海天区岛屿图像占比为岛屿检测率。表4 为6 个测试序列场景感知准确率,其中序列1 和序列4 整个序列图像场景变动较小,海天线、波动海面和岛屿区检测概率达到0.99;序列2 检测出少量波动海面起始位置跳动几行的情况,波动海面识别率约为0.98;序列3 存在个别图像将海区感知为全波动海面区域,波动海面识别率约为0.98;序列5 和序列6 检测海天线过程中会出现将岛屿底边沿视作海天线的情况,海天线检测率分别为0.97 和0.96。同时,序列5 偶尔会误判出波动海面,无波动海面识别约为0.97。实际场景中海面分为三种情况:全平稳海面、全波动海面、平稳和波动共存海面,由图11 可知本文算法都成功感出这三种情况。由以上信息知,海天线检测率、波动海面识别率以及岛屿检测率均大于95%,证明了提出的海面场景感知区域提取方法具有一定适用性。
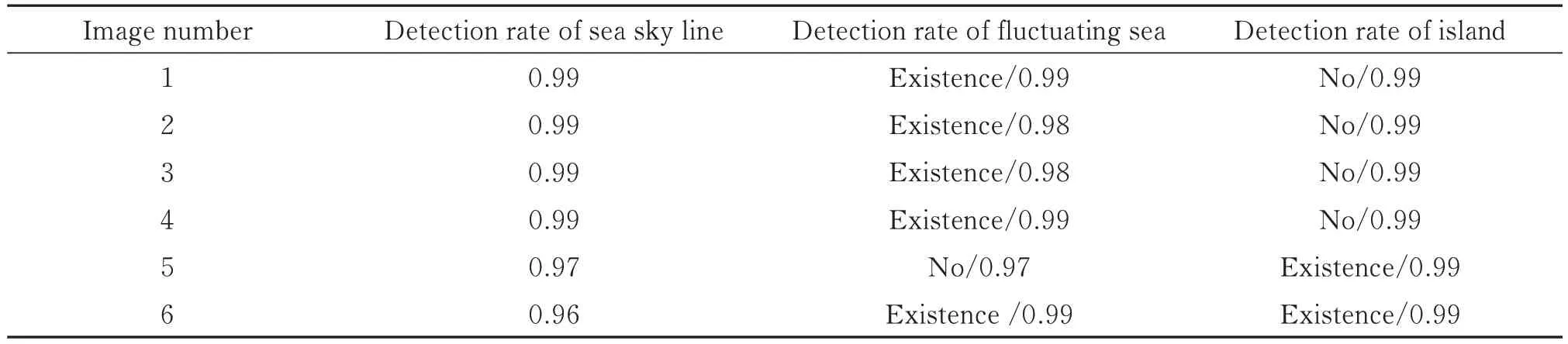
表4 海面场景感知准确率Table 4 Accuracy rate of maritime scene perception
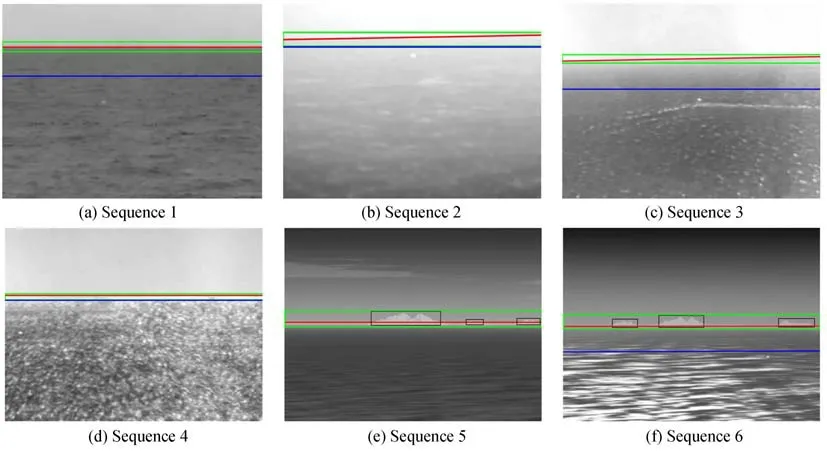
图11 测试序列场景感知结果Fig.11 Results of scene perception in test sequences
3.4 目标检测结果与分析
实验采用了7 种具有代表性的方法进行对比测试,分别是Max-median、DoG、PSTNN、TLLCM,ADMD、PLSDG、MWEC。图12 为各种算法对图9 背景抑制结果。Max-median 算法估计非平稳的背景能力很差,会发生漏检,如图12(a)。DoG 算法凸显目标效果弱,海天交界区会出现线状虚警,如图12(b)。PSTNN 处理后残留杂波强度高于目标,如图12(c4)、图12(c5)和图12(c6)。ADMD 和TLLCM 很难抑制图像序列3 和图像序列4 的大量鱼鳞波,如图12(d3)、图12(d4)、图12(e3)和图12(e4),而且序列1 和序列6 中海杂波降低了TLLCM 和ADMD 对海天区目标检测,如图12(d1)、图12(d6)、图12(e1)和图12(e6)。PLSDG 和MWEC 这两种分区检测算法增强了不同区域的目标,但在强结构边缘的海天线、高对比度岛屿、尖锐边缘的海面亮带和高亮度鱼鳞波区域存在较多杂波残留,产生大量虚警,如图12(f)和图12(g)。对于复杂海面背景,本文算法对强结构边缘的海天岛屿区和高亮度鱼鳞波、海面亮带等太阳光闪烁海杂波的波动海面获得最佳的背景抑制效果,增强了不同区域的目标信杂比,大幅度降低了诸如岛屿、海面亮带和鱼鳞波造成的虚警,减少了漏检发生。

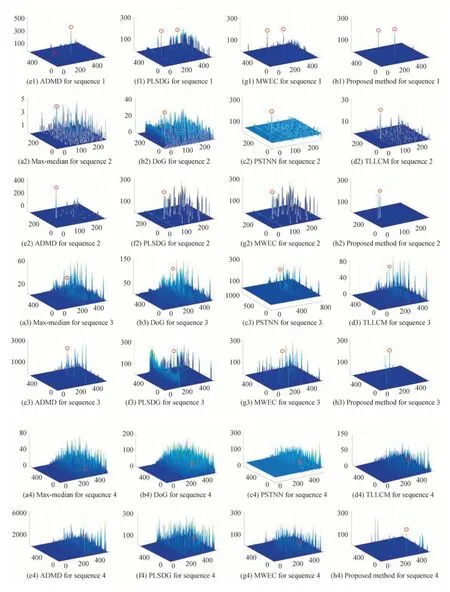

图12 不同小目标检测方法的背景抑制结果Fig.12 Background suppression for different small target detection method
表5 不同检测算法下的Table 5 with different detection algorithms
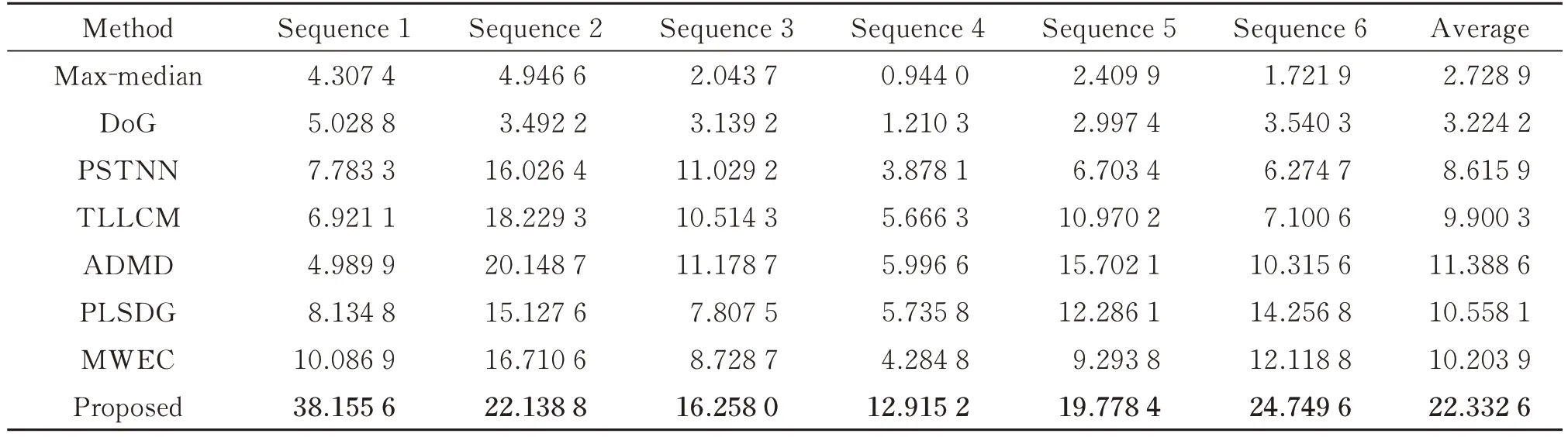
表5 不同检测算法下的Table 5 with different detection algorithms
表6 不同检测算法下的Table 6 with different detection algorithms
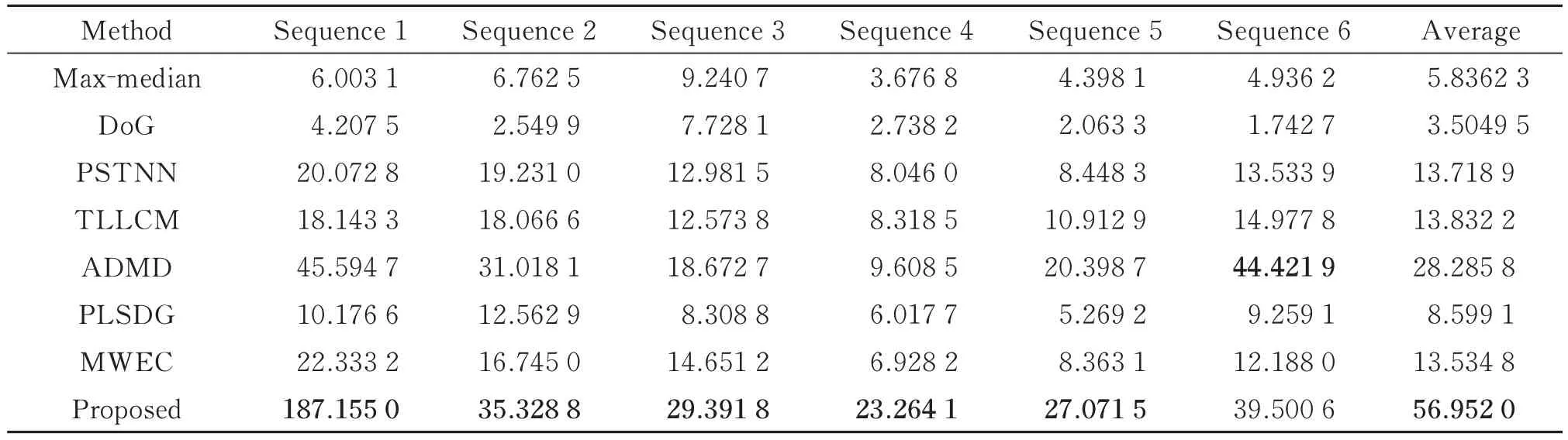
表6 不同检测算法下的Table 6 with different detection algorithms

表7 不同检测算法平均运算时间(s)Table 7 Average running time of different detection algorithm(s)
图13 是各个算法对测试图像序列的工作性能曲线。在序列1~4 和序列6 中,本文算法相较于其它算法能在相同虚警概率时取得更大的检测率。同时,本文算法工作性能曲线中检测率值能迅速增加到1,最接近纵轴,工作性能曲线包围面积最大。对于序列5,当2.152×10-5≤FAR ≤3.448×10-5时,ADMD 的检测率略微大于本文算法。同时,对比算法在各个序列中性能变化大,稳定性弱。综上表明,本文算法对具有海天线、岛屿、鱼鳞波、海面亮带的复合杂波背景目标检测更加具有鲁棒性。
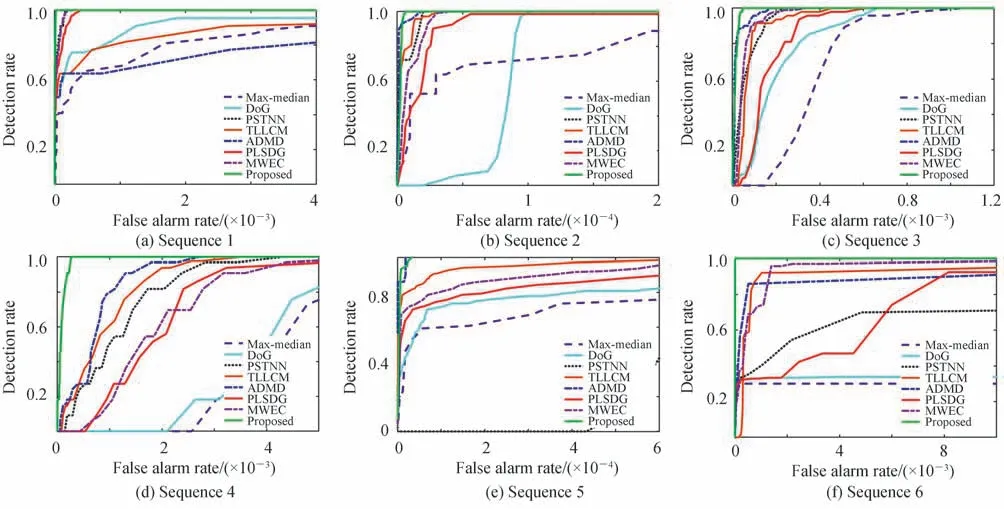
图13 不同检测方法的工作性能曲线Fig.13 Receiver operation curves of different detection methods
4 结论
针对含有岛屿、海天线、鱼鳞波及海面亮带等多种杂波的复杂海面背景小目标检测难题,提出了基于海面场景感知的红外小目标检测方法。与仅检测海天线且只将海面场景划分为天空和海区的方法相比,本方法能感知海面背景杂波组成存在的区域及起伏状态,构建出了海天岛屿区、平稳海区、波动海区等更为精细的场景信息。对于不同的杂波区域,采用与杂波成份适应的信号处理压制杂波和增强目标信杂比。实验数据表明,相比于五种全局处理方法和两种分区处理方法,本文方法取得了最强的杂波抑制能力和最佳的小目标检测性能,能适应多种复杂杂波背景。
另外,本文方法属于DBT 的单帧检测方法,存在少量虚警,如海天交界处可能残留个1 至3 个的虚警点,后续需采用基于时空线索的多帧目标联合判决进一步提高检测能力。
猜你喜欢
中国设备工程(2022年13期)2022-07-11
科学与信息化(2021年30期)2021-12-24
香格里拉(2021年2期)2021-07-28
红蜻蜓·低年级(2021年2期)2021-07-20
小学科学(2020年6期)2020-06-22
辽河(2019年7期)2019-09-03
小哥白尼(军事科学)(2019年1期)2019-04-15
新世纪智能(高一语文)(2018年11期)2018-12-29
西北工业大学学报(2015年3期)2015-12-14
遥测遥控(2015年2期)2015-04-23
