Gm-APD 焦平面阵列的距离重构与三维成像实验
2022-02-15 11:52:56高冬阳陈宗镁陈寰史庆杰夏团结陈龙江
光子学报 2022年12期
高冬阳,陈宗镁,陈寰,史庆杰,夏团结,陈龙江
(1 上海航天控制技术研究所,上海 201109)
(2 中国航天科技集团有限公司 红外探测技术研发中心,上海 201109)
0 引言
当前光电探测技术逐渐往超视距、反隐身、多维感知等技术方向发展[1]。传统基于化合物半导体P-N 结器件的红外探测、电荷耦合器件(Charge-coupled Device,CCD)的可见光/紫外探测等,在作用距离和光电对抗能力等方面提升空间有限[2]。国内外近年来提出基于光子计数的激光雷达技术思路[3-7],采用高探测灵敏度和高时间分辨率单光子探测器,以光子飞行时间测量为基本方式获取目标距离,实现目标区域三维距离像和立体轮廓,保障距离目标可探测、人工干扰释放前后的目标识别,同时满足高价值目标关键位置点识别要求。该探测体制在提高作用距离和应用效益方面具有综合性优势。面向远距离、高精度探测应用,光子计数激光雷达面临最大的技术难题是在强背景噪声干扰下保持对目标距离重构精度。噪声来源主要包括:光源自发辐射噪声、探测器暗计数、大气近程激光后向散射噪声、云层散射、太阳光散射等。单光子探测器可通过门控和光谱滤波方式抑制大部分噪声,或通过偏振调制抑制大部分激光后向散射噪声,但距离门内和光谱带宽内仍存在太阳光散射等强背景噪声,导致光子测距精度下降或者激光雷达“闭眼”。
本课题组前期在白天强背景噪声条件下,开展了室外光子测距对比试验。其中弱噪声和强噪声是针对不同天顶角下太阳光噪声而言,试验时激光发射功率、测距帧频、距离门宽度、探测器偏压/制冷温度等系统性能参数均保持一致。通过试验数据可知:弱噪声条件下目标回波比噪声光子计数值大,后续可通过线性拟合、强度阈值等方法提取目标正确距离信息;强噪声情况下目标回波光子计数值不发生改变,但噪声光子计数值整体抬升,导致无法目标回波被淹没。强噪声背景情况下通过提升单光子探测器和激光器的性能已无法满足高精度测距需求。
国内外持续开展了研究以降低背景噪声对测距结果的影响。2008 年美国林肯实验室提出基于栅格空间划分的有效信号提取算法[3],通过计算单个栅格探测概率和虚警率,利用信号数量差异及阈值提取目标距离,能够在未知背景噪声条件下检测目标距离。2011 年韩国科学技术学院提出一种有效减少噪声距离虚警方法[4],将回波信号分为两路,采用两个单光子探测器通过“与”逻辑判断信号的回波和噪声属性,实现虚警概率降低3 个数量级,不足在于回波信号分光造成作用距离和探测概率下降。英国Heriot-Watt 大学在单光子激光雷达方面做了许多创新性工作,于2021 年提出基于层级贝叶斯模型多尺度时/空三维重构算法[5],借助目标反射率在局部空间光滑特点,通过实验测量构建背景噪声模型,从低信噪比混合信号中提取目标距离。
国内盖格模式雪崩光电二极管(Geiger-mode Avalanche Photodiode,Gm-APD)器件尤其是Gm-APD焦平面阵列(Focal Plane Array,FPA)器件性能与国外器件相比还存在较大差距[6-7]。单就单元盖格器件距离重构方法而言,国内在强噪声背景下距离重构方面取得了一定进展。2013 年哈尔滨工业大学提出将信号时间相关性而噪声随机分布的特点进一步应用到阵列单光子三维成像中[8]。基于目标表面局部连续特点,通过阵列相邻像元测距结果相关性判别信号和噪声。2019 年华中科技大学提出通过采集不同距离门开启时间光子回波直方图数据,相减处理得到计数差值直方图,通过峰值判别法获取强噪声条件下目标距离[9]。2020 年中科院光电技术研究所提出子脉冲编码的噪声抑制技术[10],将发射激光脉冲分为多个子脉冲串,并事先知道发射子脉冲信号之间时间间隔,采用时移脉冲累加方法缩短光子计数所需累加脉冲时间,从而提高合作目标测距系统信噪比。2020 年中国科学技术大学先后使用单光子探测器在地表大气中实现了8.2 km[11]、45 km[12]以及200 km[13]三维成像,验证了时间关联抑制自发辐射噪声、接收系统衍射极限探测空间滤波、窄带高透过率光谱滤波、激光后向散射噪声偏振抑制等诸多去噪滤波方法的有效性。
综上可知,借助目标回波和背景噪声在时间、空间、偏振、光谱等多个维度差异,可以降低探测虚警率,实现一定噪声条件下目标准确距离有效提取。此外通过改善激光功率和增大光学接收孔径等硬件措施方式可进一步提升激光回波率,但针对资源受限小型化平台(机载或弹载等)应用,该方式不具可行性。国内单光子三维成像大多采用点元盖格单光子探测器扫描成像方式实现三维探测,距离重构方法也大多数集中在点元盖格单光子探测器件方面。
本文基于Gm-APD PFA 搭建激光三维成像实验装置,采用不同距离重构方法进行点云数据处理结果比对,提出基于二维扫描和面阵探测相结合的激光回波信息处理方法,从理论上提高激光回波信噪比和作用距离,为小型化平台下的远距高帧频主动激光成像技术提供支撑。
1 单光子探测器距离重构方法
1.1 光子计数时间统计方法
由时间相关单光子计数(Time Correlation Single Photon Counting,TCSPC)原理[14]可知,当目标回波具有一定信噪比时,利用回波中信号占比大的特点,通过长时间累加与统计区分信号与噪声。图1 为TCSPC原理示意,在无背景噪声的理想情况下,探测器在单次探测周期内只响应首次到达的光子,通过长时间累加与统计形成光子飞行时间(Time of Flight,TOF)分布曲线。常用信号提取算法为峰值—阈值法[15],有无信号回波触发分布直方图区别在于信号回波处触发频数存在高峰,将峰值法提取触发频数峰值的时间位置作为目标距离。峰值—阈值法仍有一定局限性,对于少帧数统计下信号及噪声触发次数相同时难以提取目标距离,对于异常噪声峰会被误提取为目标距离。进一步采用均值法或质心法[16],在短时间统计情况下也会造成较大重构误差使得目标三维图像失真[17]。
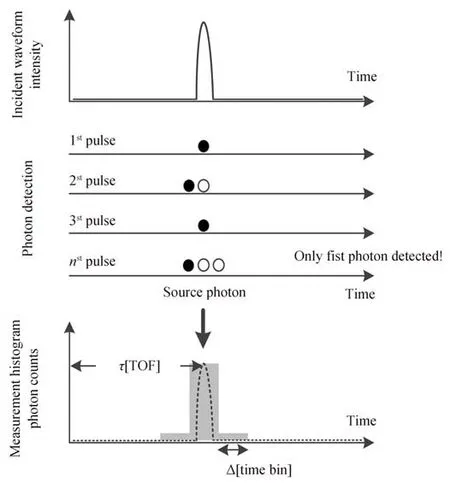
图1 无背景噪声情况下光子计数直方图Fig.1 Photon counting histogram without background noise
1.2 线性/指数拟合方法
针对强噪声背景下探测,TCSPC 方法无法通过目标回波触发探测器频数来提取目标距离信息。提出线性拟合方法凸显目标回波位置信息。考虑到探测器死时间效应会使单周期内只响应首个入射的光子,探测器输出大部分脉冲信号是由噪声引起且集中在距离门开启时刻。采用峰值-阈值方法会得到错误距离信息,这是因为单光子探测响应符合泊松分布,起始时刻探测器响应计数值远大于目标回波响应计数值(如图2(a)和图3)。对统计的光子到达时刻曲线进行线性/指数函数拟合(y=a·t+b,y=ax+b),将原始的光子计数统计曲线与拟合后的函数值相减得到差值分布曲线,通过峰值—阈值方法可以较准确找到差值分布曲线中目标位置。
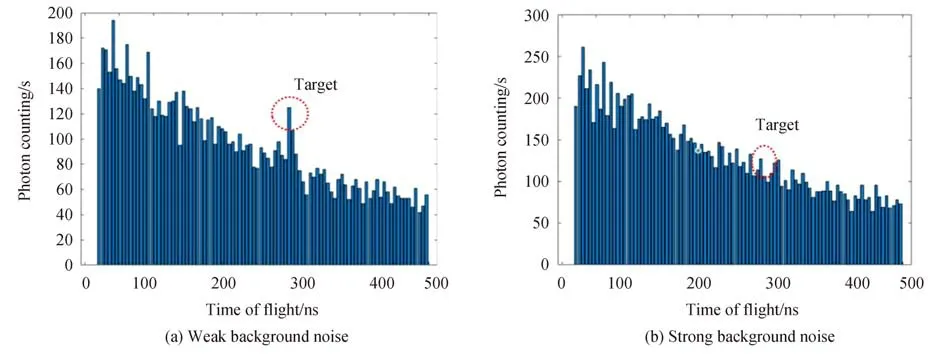
图2 不同强度背景噪声光子计数分布Fig.2 Distribution of photon counting based on the different background noise
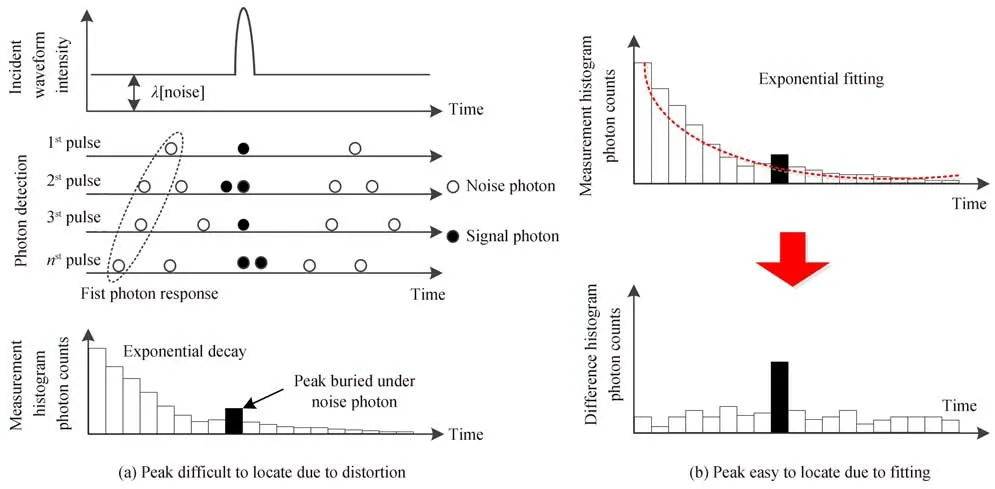
图3 拟合提取峰值示意Fig.3 Schematic of extracting peak by fitting
1.3 矩形/高斯匹配方法
激光回波脉宽往往会展宽并占据多个时间间隔,在目标回波时间附近触发光子计数时间较为集中。采用矩形或者高斯匹配方法对光子计数直方图进行平滑处理,可进一步凸显目标回波和抑制异常噪声。窗口形状可以选择矩形或者高斯型,窗口大小根据激光脉冲宽度Tp确定。矩形匹配窗口和高斯匹配窗口函数表达式为

矩形/高斯匹配距离重构流程如图4。
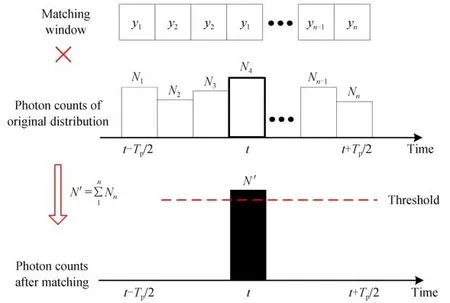
图4 匹配方法示意Fig.4 Schematic of the matching method
将匹配窗口函数值视为一维数组,数组大小由激光脉冲宽度Tp所占时间间隔数n来确定,数值由窗口匹配函数式(1)确定。以光子计数分布中的某一时刻t为中心,取n个原始光子计数数据;将两者进行乘积后求和,即N'=∑y·Nn,以N'作为t时刻新的光子计数值;在时间轴上将t从距离门起始时刻至距离门关闭时刻进行遍历,得到匹配后的新光子计数分布;采用峰值—阈值法判定目标回波。该方法基于光子计数分布波形与激光脉冲波形的相关性,实现噪声干扰下的目标距离提取。
1.4 时间相关方法
TCSPC 方法需要长时间累积探测来抑制背景噪声和提取目标距离信息。针对强背景噪声下的目标距离信息快速获取需求,利用时间轴上目标回波响应间隔集中在窄脉宽内而噪声响应随机分布特点,提出时间相关去噪方法。以时间轴上相邻n个响应为判断最小单元,定义为n邻域。由背景噪声引起的探测器响应在时间轴上随机分布,由目标回波信号引起的探测器响应由于受发射激光脉冲调制,在时间轴上分布比较集中且主要集中在激光脉宽Tp时间范围内。如果两个相邻光子之间的飞行时间差小于激光脉宽,则两个光子称之为相关光子,并保留其作为回波信号光子,否则去除被判定为噪声的光子事件,最后将相关光子进行直方图统计并通过峰值—阈值法提取目标回波信息。将单像素点在距离门Tg内的光子响应时间点t1,t2,…,tn逐一进行编号(如图5),求取时间轴上n相邻时间点的时间差,并设定目标回波信号响应判定标准为

图5 邻域时间相关示意Fig.5 Schematic of the neighboring time-correlation

式中,n是时间轴上光子达到时刻的n邻域,t是光子到达时刻,Tp是发射激光脉冲宽度。
如果时间轴上某响应时刻n邻域能够满足该条件,则判断该时刻及其n邻域响应均为回波信号,通过n邻域取均值方式获得目标距离信息,即T=(∑ti)/n。如果不满足该判定标准,则进入下一时刻n邻域再次进行判定,直至距离门时间轴遍历完毕。当完成一个像素点距离重构后,转移到下一个像素点进行同样的判断,最终获得所有像素点目标距离三维图。该方法有利于强背景噪声环境下光子测距,n邻域均值作为目标距离将会丢失目标深度细节特征,同时在多距离目标回波情况下会造成明显测距误差[15]。
1.5 空间相关方法
事实上大部分物体表面具备局部连续特点,相邻像素视场内探测的目标距离差异不会太大,相邻像素提取的目标距离具备空间相关性。通过设置距离阈值可进一步将偏离距离较大的像素点距离信息剔除。采用空间平滑约束方法,将剔除像素点距离用邻域距离均值填补,进一步提高目标距离图像质量。
以9 邻域为例(如图6),假设像素(i,j)光子计数统计分布为Hi,j(t,N),其中t为光子到达时刻,N为对应光子计数值。通过9 邻域光子计数累加得到新光子计数统计分布,再根据峰值-阈值法将提取目标回波。

图6 9 邻域空间相关滤波示意Fig.6 Schematic of the nine neighborhood spatial correlation filter
表1 列出了上述不同方法的优缺点和可能适用的应用场景。

表1 5 种不同的方法对比Table 1 Comparison of the five different methods
2 实验
实现激光三维成像的两种方式:扫描成像和凝视成像。扫描成像一般采用双光楔、振镜或者MEMS、快反镜等进行逐点扫描发射激光覆盖探测视场,采用点元探测器接收回波信号。单元探测器光敏面较小,且逐点扫描非常耗时,因此该方式成像视场难以做大,成像实时性难以提升。凝视成像一般采用大激光光斑直接照射覆盖探测视场,采用阵列探测器接收信号,该方式具有体积小易于集成等优点。激光经过扩束后到达目标时激光能量密度将极大衰减,且大面阵探测器接收回波时激光功率密度将进一步衰减,因此该方式短期内难以满足远距离成像需求。
搭建了细光束发射扫描与面阵探测器接收相结合的激光三维成像实验装置,如图7(a)。采用二维扫描器件实现激光细光束快速扫描发射(2.5°×2.5°)并覆盖探测视场(2°×2°),细光束发射能保证到达目标处的激光能量密度。采用面阵探测器接收激光回波信号能够保证大视场成像探测。激光发射和接收同轴可最大限度保证视场内激光能量利用率。二维扫描器扫描频率达kHz 量级可最大限度提升单元视场内激光回波率。
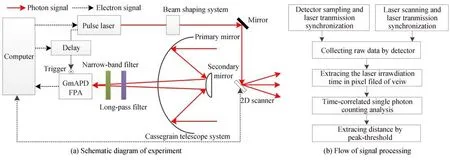
图7 基于扫描发射与面阵接收相结合的激光成像实验Fig.7 Laser imaging experiment base on fine beam scanning and Gm-APD FPA receiving
脉冲激光器(波长1 550 nm,脉宽1 ns,单脉冲能量0.1 mJ)经过光束整形光学系统后的束散射角为1 mrad,通过反射镜和扫描器进行二维扫描发射,空间扫描图案可根据需求进行设置。采用卡塞格林望远系统接收激光回波信号,经过长通滤光片(带外截止深度OD 6,透过率95%@1 064 nm)和窄带滤光片(Δλ=2 nm,透过率90%)后汇聚至Gm-APD FPA(横向分辨率64×64,时间分辨率1 ns,门宽9 bit)。激光器重频与Gm-APD FPA 帧频同步设置为20 kHz。电延迟器用于调节探测器距离门开启时刻,实现感兴趣距离目标探测。基于Gm-APD FPA 输出“0”或者“1”数字化信号,以及二维扫描器方位反馈信号进行目标距离重构流程,如图7(b)。
由于采用细光束扫描发射导致探测器单像元无法全程实时地接收目标回波信号,有效回波仅在断续时间点出现,大部分时刻接收噪声响应。结合激光光束扫描方位信息,在探测器输出信号时域上进行精确间隔取样,保证统计范围内的目标回波信号占大多数,降低光子计数直方图中噪声计数。以像元(i,j)为例(i∈[1,64],j∈[1,64]),在单个探测器采样周期内,统计激光光束发射方位(θx,θy)处于像元(i,j)视场范围(Δx,Δy)内的所有时刻Tt(t∈[1,64]),其中单像素视场内响应目标回波的次数是由激光扫描周期决定,最终对所有时刻Tt进行直方图分布统计,通过上述多类距离重构方法提取目标距离。
3 结果与分析
在室外几百米以内对目标模型(大小100 mm×90 mm)开展了三维成像实验,目标背景为天空云层。采用光子计数时间统计法得到2 Hz 帧频下的目标3D 距离像和2D 强度像,如图8。通过距离重构可以清楚看到目标整体轮廓,但是目标边缘以及探测器其他视场内存在较多噪声,不利于后续激光三维图像目标特征提取与识别等应用。目标强度像不均匀主要是由目标反射率差异、探测器响应非均匀等因素引起的,2D 强度像可用辅助3D 距离像进行目标识别。图9 是选取图8 中像素点(15,32)(代表目标点)和像素点(42,42)(代表背景点)的2 Hz 光子计数统计直方图,其中目标处具有较强回波光子计数,通过峰值—阈值方法较容易判定目标距离,而背景处均是符合泊松分布特点的噪声响应。以目标回波信号背景比值(Signal Background Ratio,SBR)作为定量比对评估参数,SBR 被定义为目标回波处10 Bin 内光子计数值比上10 Bin内噪声光子计数值,图9(b)中目标的SBR 为6.02。

图8 激光雷达成像结果(2 Hz)Fig.8 The results of LiDAR imaging(2 Hz)
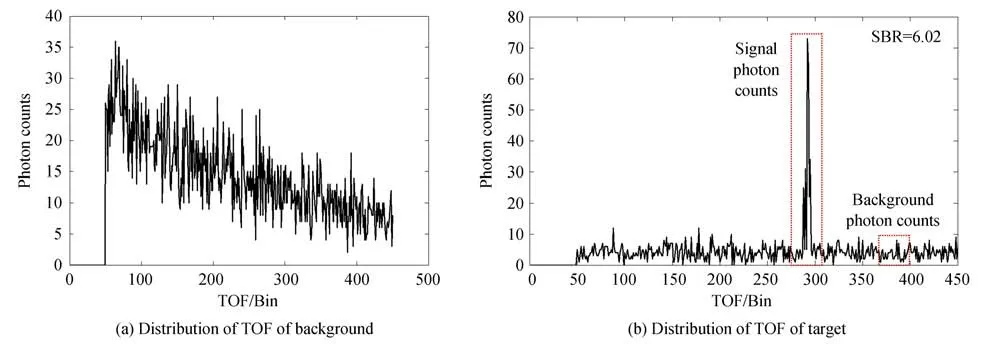
图9 光子飞行时间分布(2 Hz)Fig.9 Distribution of TOF(2 Hz)
针对动态目标激光三维成像应用,成像帧频2 Hz 无法满足应用需求,因此需要开展少帧统计下目标距离重构方法比对。为比较不同距离重构方法,选择图8 中(42,42)目标像素点中的1 000 帧数据作为比对对象,如图10。其中,图10(a)和图10(b)分别采用高斯匹配(σ=2 Bin)和矩形匹配(3 Bin 矩形和5 Bin 矩形)方法,获得的新光子计数直方图曲线更加平滑,有利于后续目标回波信号提取。图10(c)采用线性拟合方法后,拟合值与原始数值的差值归一化曲线反而无法提取出目标回波信号。图10(d)分别采用了3 Bin、5 Bin和7 Bin 时间邻域相关处理,时间邻域差值曲线中仍无法提取出目标回波信号。图10(e)是对(42,42)像素的9 邻域200 帧光子计数数据进行累加处理,可以发现在单像素无法提取目标回波的情况下,9 邻域空间相关处理后更有利于提取目标距离信息。
通过上述距离重构结果可以发现,邻域时间相关处理后反而无法提取目标距离信息,主要原因是所使用的Gm-APD FPA 器件在时间轴上的响应不均匀,具体表现在:连续1 000 帧探测中Gm-APD FPA 的(42,42)像素响应光子数仅为201,在50 Bin~450 Bin 时间轴上只有136 个Bin 上存在光子响应。单元Gm-APD 器件时间响应均匀性比Gm-APD FPA 器件更好,采用单元Gm-APD 器件将会取得较好距离重构效果[17]。
图10(a)~(c)原始数据中SBR 为7.40,经过高斯匹配、矩阵匹配以及线性拟合等方法处理过后,SBR 值分别变为7.41、9.40 和8.23。高斯匹配方法处理后效果不明显,矩阵匹配和线性拟合处理方法有一定效果提升。图10(e)原始数据中9 邻域SBR 均值为0.50,经过邻域空间相关方法处理过后,SBR 值分别变为6.67,经空间相关处理方法后SBR 有数量级提升效果。根据SBR 提升效果,选取传统光子计数时间统计方法、矩阵匹配方法和空间相关方法等三种方法进行3D 图像重构。


图10 不同帧重构方法获得新的光子计数统计直方图Fig.10 New photon counting statistical histogram obtained by different methods
图11 为不同成像帧频下的目标3D 图像重构结果。通过三维图像初步比较可以看出,空间相关方法在少帧(100 Hz)统计情况下仍具有较好的3D 图像重构质量,目标内部空缺的距离值会得到填补,三维图像较平滑,但会造成少数边缘细节部分丢失;矩阵匹配传统方法在多帧(40 Hz 和20 Hz)统计情况下可以取得较好的去噪效果。在实际应用过程中去噪方法选择与器件性能(死时间、暗计数等参数)密切相关,比如时间相关方法在单元Gm-APD 器件中具有较好去噪效果[17],但在本文中的面阵盖格器件中难以取得较好效果。

图11 100 Hz、40 Hz 和20 Hz 成像帧频下的三维图像重构Fig.11 3D image reconstruction under 100 Hz,40 Hz,20 Hz frame per second conditions,respectively
从本质上来说,文中提到的空间相关方法(匹配方法、拟合方法、时间相关方法)和TCSPC 方法是同一类方法,空间相关方法是借助面阵探测器和目标局部表面连续的特点来实现,匹配方法、拟合方法和时间相关方法是借助目标回波聚集在同一时间附近的特点来实现的。空间相关法等是一种技术层面的方法,TCSPC 方法是一种物理层面的方法。在实际应用过程中需要根据成像系统的激光发射与接收特点、探测器件特点、目标特性以及应用场景进行综合考虑,寻找出最优的解决方案。
噪声抑制和距离重构始终是光子计数成像算法的核心问题之一。硬件系统可较好滤除大部分噪声,而高效且抗噪距离重构算法是目标高质量三维成像的保障。除了设计优化硬件系统与采用新型物理降噪原理[4,6],抑噪算法可大致分为信号级(单像素回波)抑噪与图像级(三维回波)抑噪,信号级抑噪算法有明确的物理背景与意义,图像级抑噪算法可分析利用三维回波信息,功能扩展性好但计算量大[9-11]。本文研究聚焦在信号级抑噪和目标距离重构方面,后续需要根据回波特性分析结果以及应用需求,综合确定最终距离重构方法。
4 结论
分析了光子计数时间统计、线性/指数拟合、矩阵/高斯匹配、时间相关、空间相关等方法原理与特点,以及对目标距离重构精度的影响。提出一种细光束发射扫描与面阵探测器接收相结合的激光三维成像实验方案,该方案兼顾提升目标处激光能量密度和扩大成像视场的特点。采用激光扫描方位信息联合的处理方法,在回波数据处理过程中融合扫描方位提高探测信噪比。
基于面阵盖格APD 阵列原始数据,开展了不同距离重构方法处理结果比对。实验发现空间相关方法具备较好的面阵盖格器件距离重构效果,能够提升三维成像帧频。系统梳理了重构方法并开展实验比对,研究结果可为强噪声背景下激光三维成像高帧频、高分辨成像探测应用提供实验支撑。下一步将开展室外远距实验,探索研究基于Gm-APD PFA 器件的三维图像目标识别与跟踪应用。
猜你喜欢
光子学报(2022年11期)2022-11-26 03:43:44
数学小灵通(1-2年级)(2021年11期)2021-12-02 01:30:20
中等数学(2020年8期)2020-11-26 08:05:58
小学生学习指导(低年级)(2020年4期)2020-06-02 09:09:26
小学科学(2020年1期)2020-02-18 06:26:40
百科探秘·航空航天(2020年12期)2020-01-22 08:57:19
小学科学(2019年12期)2019-01-06 03:38:45
数学小灵通·3-4年级(2017年11期)2017-11-29 01:35:42
湖南师范大学自然科学学报(2015年1期)2015-02-27 14:50:05
太空探索(2014年9期)2014-07-10 13:06:30