
基于强化学习的云资源混合式弹性伸缩算法
2022-02-14 10:55:30吴晓军张成原盛任晓春王玮
西安交通大学学报 2022年1期
近年来,云计算行业快速崛起。云计算的虚拟化概念和自动伸缩功能使计算或应用外包到云成为一种常见的范式
,以按需购买和按需付费模式使用资源可以节约资源和成本。但是,云环境的高度灵活性使资源伸缩问题变得更加复杂
。云环境中的工作负载是不确定的,这一点在涉及面向用户的应用程序中尤为突出
。
自动伸缩是一种调整应用程序资源量以满足不断变化的工作负载需求,同时最小化成本或资源的技术
。目前,已经提出了许多自动伸缩方法,这些方法可以分为响应式和预测式两种
。响应式方法主要包括基于阈值的策略、排队论和控制论等,预测式方法则包含时间序列分析和强化学习方法。由于提前做出了伸缩决策,预测式方法的伸缩及时性比响应式要好。时间序列分析通常包含两个阶段,第一阶段是工作量预测,第二阶段是根据预测的工作量做出扩展决策
。然而,许多时间序列分析方法都是基于阈值来做出伸缩决策,存在阈值设置过程复杂并且难以确定达到阈值后扩展或收缩的实例数的问题。基于强化学习(RL)的伸缩方法具有自适应性和鲁棒性
,不需要任何先验知识,可以确保当工作负载动态变化时应用软件的资源利用处于相对稳定的状态,因此RL是云环境中进行自动伸缩的一种有前景的方法。
目前的工作大部分都集中于在水平伸缩领域进行
。但是,水平伸缩通常面临动作空间难以准确设置的问题。在水平伸缩中,如果将RL的每个状态的动作设置为(-1,0,1),那么面对负载急剧增加情形需要多次调整才能有效减少违反服务质量请求(QoS),影响资源调度的及时性和动态性,还影响用户体验;如果将动作空间范围设置得过大,则会导致算法收敛慢,而且在强化学习的探索阶段随机选择的动作可能会造成意料之外的实例数大范围变化而使系统不稳定。此外,尽管水平伸缩是管理云环境中资源的常用方法,但是也存在一些水平伸缩无法处理的情况
。例如,某个实例上堆积了远超其处理能力的任务时,传统的水平伸缩方法虽然能检测出应用违反QoS数上升,并且会添加实例,但并不能有效解决问题,反而会产生额外的成本。
事实上,应用可在垂直和水平两个方向上进行伸缩。其中,垂直伸缩是指更改单个实例的计算资源量。云环境中的应用程序很容易出现许多影响CPU和内存等资源的本地性能问题,通过这种伸缩,可以调节单个应用实例的性能。水平伸缩指增加或减少实例。两种方法各有利弊:垂直伸缩通常较快且平滑,可以处理单个实例出现问题的情况,但能力范围有限;水平伸缩通过增减应用实例的数量来调整应用能力,通常较慢且粗粒度,对环境变化的反应不及时,而且每个实例都需要消耗一定的基础资源来维持自身运转,但可以在较大范围内伸缩,保证应用的能力满足需要。良好的伸缩策略应结合垂直伸缩和水平伸缩,然而目前大多数工作忽略了垂直伸缩。少数将RL应用于垂直伸缩的工作也存在状态空间和动作空间太大、算法可伸缩性差等问题。例如,Kardani-Moghaddam等将强化学习应用于垂直伸缩,将状态空间和动作空间构建为所有实例的状态和动作的笛卡尔积,算法复杂度随着实例数增加而指数上升,导致这项工作算法训练时间长且在算法可伸缩性方面有限,原文献中也限制了最大实例数
。
针对这些问题,本文提出了一个分组的基于强化学习的混合式自动伸缩算法(BGRL),强化学习算法选择资源自动伸缩问题中最常用的
学习算法
。该算法将水平伸缩和垂直伸缩相结合,通过将应用实例进行逻辑分组的方式使强化学习状态空间和动作空间固定,不随实例数变化而变化,解决了现有的RL算法空间爆炸及算法可伸缩性受限问题。通过汇集所有组的意见决定水平伸缩动作,解决了现有解决方案中设置水平伸缩动作空间时所面临的性能与稳定性的取舍问题。
1 相关工作
式中:
为调整成本,是垂直伸缩操作引入的恒定代价;
为性能损失成本,是当请求违反QoS时支付的性能损失;
为运行应用程序的资源单位成本,与分配的CPU资源量成正比。
、
、
分别是不同成本的非负权重,
+
+
=1。在式(7)的原文献中存在3种权重分配方式:①
=0
01,
=0
90,
=0
09;②
=0
01,
=0
09,
=0
90;③
=0
33,
=0
33,
=0
33。
调查结果表明,在广东省青云山自然保护区通过红外相机调查野生动物的分布是有效的检测手段之一,为地面和林下活动警惕的物种监测提供了有效手段,值得长期和扩大范围应用。但由于各种条件的限制,本次调查仅限于森林动态监测样地范围内,且野外调查和相机实际工作时间较短,投入的相机数量有限,尚难以全面准确地评估该地区鸟类和兽类的多样性格局及重要物种的分布和种群状况,特别是斑灵狸、豹猫、白鹇等关键物种的分布和密度,为进一步掌握野生动物的资源现状,亟需在大范围内开展长期的调查和监测工作,并合理增加红外相机的数量(按公里网格法),扩大监测区域和延长监测时间,从而更全面地掌握该地区野生动物现状及分布格局。
资源的自动伸缩问题通常基于监视(M)、分析(A)、计划(P)和执行(W)这种MAPE架构来解决。遵循这种架构,Aslanpour等提出了一种成本感知型自动扩展框架,重点关注执行级别的可能改进
。该框架使用基于阈值的规则来更改系统中虚拟机的数量。尽管基于阈值的决策在解释和实现方面既简单又方便,但是缺乏适应环境变化的灵活性使得该类解决方案不是最佳选择。基于阈值的扩展策略是一种响应策略,存在资源调度不及时的问题。此外,阈值设置应基于大量数据分析,并且每种情况的阈值未必适用于其他情况。在响应式方法中,虽然基于排队论的方法应用于受工作负载变化影响较小的系统时可以看作预测算法,但在其他情况下,它仍然是响应式算法
。更重要的是,基于排队论的模型是系统的近似估计模型,所做出的决策可能不适合系统的实际情况。控制论方法主要用于制定响应式扩展策略,并且仅适用于缓慢变化的工作负载。当工作负载突然变化时,其模型参数无法在短时间内更新为合理值
。
定理 2.4 度量空间([0,1], ρG)中的Cauchy-列收敛,即([0,1], ρG)是完备度量空间。
为了使框架实现更高的适应性,强化学习是一种不错的选择。但是,基于强化学习的解决方案遭受状态和动作空间爆炸、缓慢收敛的困扰。Ghobaei-Arani等利用
学习作为MAPE架构中计划阶段的一部分。这些决策是马尔可夫决策表和
表的组合,用于决定系统中虚拟机的添加和删除
。Arabnejad等引入了
学习和SARSA学习的模糊版本,使用监控指标上的模糊规则作为解决方案,以减少状态数,从而减小
表规模
。Horovitz等提出了一种在容器调度中使用RL动态改变实例伸缩阈值的算法,该算法根据实例数确定状态,与传统的RL算法相比,大大减小了状态空间的规模
。这些工作使用基于阈值或基于规则的技术来减少状态数量,虽然可以有效减小RL算法规模,但是难免会使算法准确性受损。本文采用的分组建模方式可以使算法的状态空间固定,在不受应用规模限制的同时可以收集所有实例的状态,之后再做出决策。
将RL应用于资源伸缩时,还会遭遇动作空间难以准确设置的问题。为此,Yang等提出了一种基于模型的RL算法,以便在微服务场景中使用系统知识
。但是,该算法的每个状态相对应的动作数是固定的。因此,当处理流量急剧变化时,该算法不能解决重复伸缩的问题,导致违反服务级别协议或浪费资源。Horovitz等提出的算法通过动态动作来寻找每个状态的最佳动作和最佳动作附近的可行动作,这样可以将动作空间规模固定在一个较小值
。但是,此算法依赖于
函数的单峰特性,且动作空间改变时,新动作的
设置存在问题。本文的水平伸缩动作是由多个智能体组的伸缩动作汇集而成的,这样既保证了资源伸缩的及时性和准确性,又避免了重复伸缩的问题。
最后,目前的研究工作很少考虑垂直和水平伸缩的组合,而且受限于算法规模,现有的同时考虑垂直和水平伸缩的RL算法通常会在算法伸缩准确性方面做出让步。例如,Rossi等提出的利用RL的基于容器应用的水平和垂直伸缩算法,为了避免算法规模爆炸,规定应用的所有实例在资源量上保持一致,即垂直伸缩动作是全局性的,所有实例同步执行,这样的规定显然忽略了不同实例可能需要不同资源量的情况
。本文结合了垂直和水平两个方向上的伸缩,并把垂直动作细分到每个实例,可以更细粒度地调节应用性能。
2 基于强化学习的混合式伸缩算法
针对相关工作中提到的将强化学习应用在云资源混合式伸缩问题时面临的算法空间爆炸、收敛速度慢、动作空间难以准确设置等问题,本文提出了基于强化学习的分组的混合式伸缩算法。
2.1 BGRL算法逻辑结构
图1描绘了本文BGRL算法的逻辑结构。用户将请求发送到应用的负载均衡器,负载均衡器将这些请求分配到现有的应用实例中。每个实例都包含了本地监测模块和本地伸缩模块。本地监测模块负责监视并更新该实例的状态信息,在本文中指CPU利用率和请求的平均响应时间。每个本地伸缩模块执行垂直伸缩动作来更改该实例资源。在应用层面由水平伸缩模块执行水平方向上增减实例的操作。
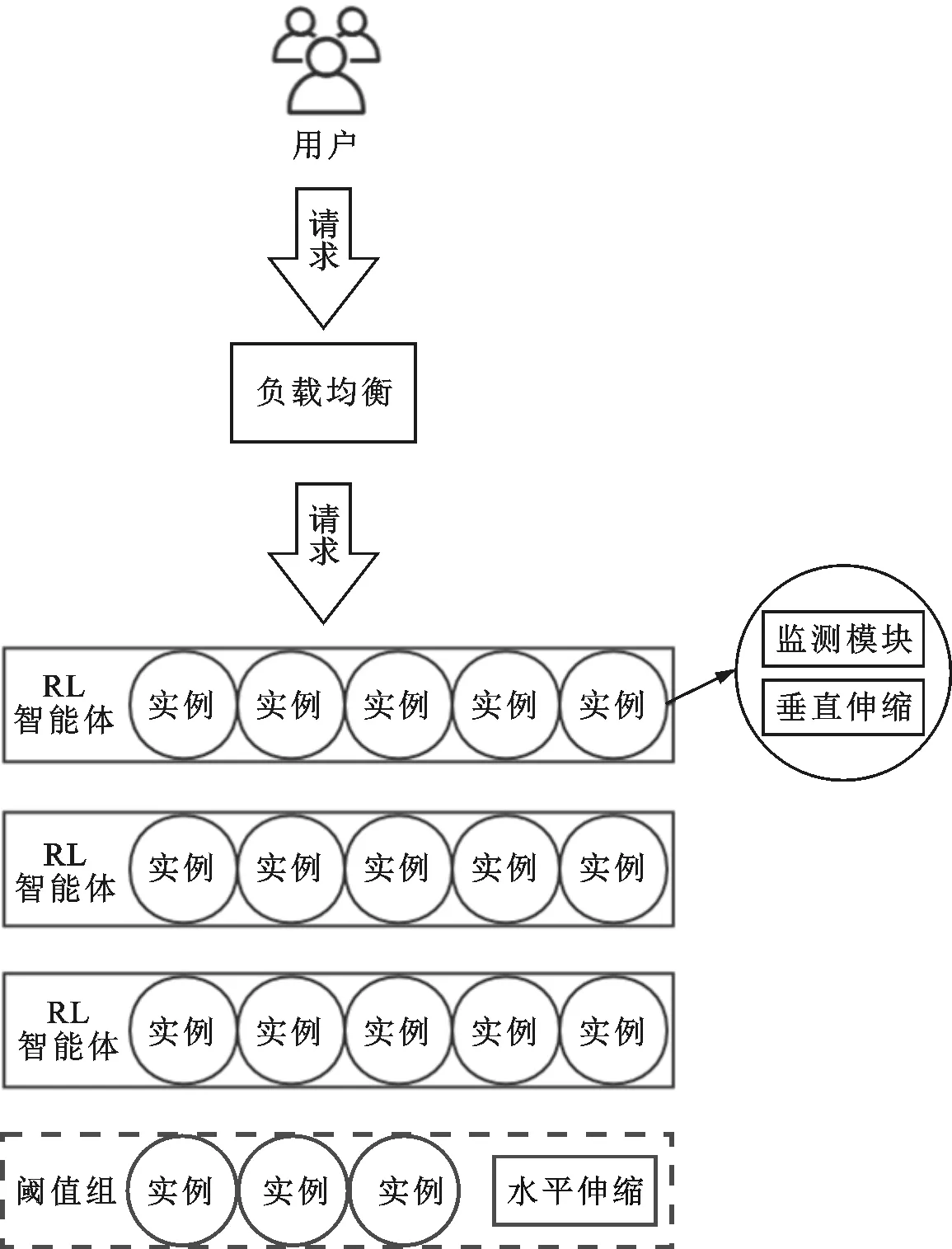
逻辑分组是指在逻辑上本文将应用程序实例分为若干个智能体组和一个阈值组,即如果目前应用包含
个实例,则将
表示为
图2中,控制字符/R/标示一个多帧的开始;/A/,标示一个多帧的结束;/Q/,标示链路配置信息传输的开始;/C/为链路配置信息,共由1四字节组成,这些配置数据由用户在初始化时写入配置寄存器中,用于定义JESD204B系统的工作模式;/D/为用于填充多帧的数据,并无实际意义。
=
+
(1)
式中:
表示智能体组容量;
表示智能体组数量;
表示阈值组中的实例数。
图2显示了BGRL算法自动伸缩的主要过程。本文将应用运行过程划分为若干个时间间隔,在每个时间间隔末进行混合式伸缩。每个实例通过监测模块定期收集该实例状态,在每个伸缩过程开始时,强化学习模块收集所有实例最新状态,在逻辑上将所有实例划分为若干智能体组和一个阈值组,每个智能体组代表一个强化学习智能体,智能体组的状态由组内所有实例的状态联合组成。图2中,
=5,
=2,
=3。
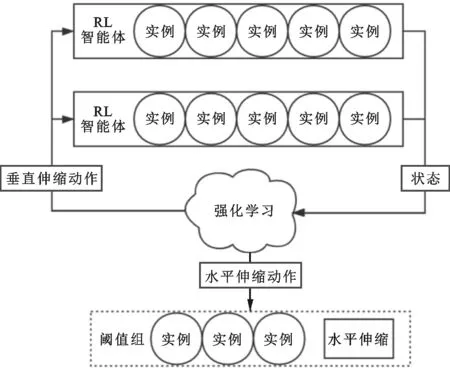
所有智能体组共同训练一个强化学习算法,通过并行学习,可以加快算法收敛速度。本文中的RL算法动作空间包括组内各实例垂直伸缩动作和应用级别的水平伸缩动作,垂直伸缩动作发回给智能体组,由组内各实例中垂直伸缩模块执行。水平伸缩动作由所有智能体组训练得到的水平动作汇集发送给阈值组,由水平伸缩模块在阈值组内进行增减实例的操作。
如果阈值组实例数到达
,则该阈值组升为智能体组,并开启一个新的阈值组。如果阈值组中无实例且需要删减实例,则挑选一个智能体组降为阈值组。最后,阈值组中的实例进行基于阈值的垂直伸缩。如果系统实例数不足以构成一个智能体组,则根据系统状态进行基于阈值的水平伸缩。
BGRL算法流程如下。
输入:
表,
,
,
的最小值
,智能体组容量
,所有实例最新状态信息
。
24end if
举例:基于特征b33a589d3627bc6f2e5bd0e6b42f 53b6,探测到URL http://198.98.122.172/cunty.sh,进而截取获得IP 198.98.122.172,针对这个IP进行端口探测和协议识别198.98.122.172:50
1 根据
并行更新
表;
2 根据
将所有实例分为
个智能体组和一个阈值组;
3 根据阈值规则对阈值组实例进行垂直伸缩;
20 减少-
个应用实例;
5 初始化水平伸缩变量
=0;
临床中甲状腺功能亢进症又称甲亢,其指由多种的病因所导致的甲状腺的激素分泌过度,引发的以神经、循环或消化系统兴奋性的升高与代谢亢进为主要的临床表现的一种综合征[1]。目前的临床资料认为,甲状腺功能亢进症与自身的免疫系统有关,为器官特异性的自身免疫系统疾病。
6 for
=1 to
do
7 计算第
个智能体组的状态
;
12 选择
表中状态
对应的最佳动作;
现阶段,随着我国科技水平的不断提升,智能手机已经得到了广泛的普及。学生能够借助手机来进入到淘宝、京东、拼多多等网站进行网购,网购商品繁多、操作简单,这在一定程度上拓展了学生的消费需求。
9 if
<
then
10 随机选择伸缩动作;
“数学益智游戏”校本课程由学校自身组织、规划,不仅活动方案由学校自身研究设计,而且课程实施力量也来自学校内部,因此课程开发时要注意发挥校内教师的作用,调动教师参与的积极性。根据前期的问卷调查和访谈,我们了解到实施游戏教学的形式会受到班额大,空间范围小的限制,因此,我们结合学校现有条件开发了系列数学游戏微课程(见图2)。教师各显神通,有的用手机录制,有的用PPT录制,有的用超级录屏或Camatasia Studio录屏软件……课程的跨时空性大大地提高了数学游戏开展的可操作性。
11 else
8 产生一个0到1的随机数
;
13 end if
14 将垂直动作发回第
个智能体组执行;
15 将水平伸缩动作计入
;
16 end for
17 if
>0 then
18 增加
个应用实例;
19 else if
<0 then
4 if
>0 then
21 end if
为确保建设项目取得预期的建设成效,学校出台了《广东开放大学、广东理工职业学院“创新强校工程”项目管理办法》《广东开放大学、广东理工职业学院“创新强校工程”资金管理办法》《广东开放大学、广东理工职业学院“创新强校工程”项目验收办法》等系列制度,通过制度的完整性和规范性,既为项目的建设提供了各项制度保障,又为各项目的合规依规建设提供了制度约束。
22else
23 根据阈值规则对阈值组进行水平伸缩;
1.1一般资料2016年1月至2017年2月我院选取50例高血压左室肥厚伴左心衰竭患者作为观察组,同期选取了体检者50例作为对照组。观察组有23例女性和27例男性,最小35岁,最大75岁,平均(56.7±6.1)岁;对照组有25例男性和25例女性,最小35岁,最大73岁,平均(54.8±6.7)岁。两组的普通资料对比不存在统计学差异性,能够进行比较分析。
输出:更新后的
表和
。
式中
代表平均响应时间的最大可接受值。
26
=
-
;
27end if
28输出更新后的
表和
。
2.5 对农药残留问题的认识 农药的不科学使用容易造成农药残留量超限,危害人类健康。在此次调查研究中,83.4%的烟农认为烟草存在农药残留问题,对人体有危害,26.6%的烟农认为烟草经过了烘烤过程,后期还要经过燃烧,不存在农药残留。95.8%的烟农认为农药残留量逐年降低,也有4.2%的人认为时好时坏,主要根据当年病虫害发生情况而存在差异。
2.2 Q学习设置
学习是针对连续时间半马尔可夫决策问题的一种RL,它是自动伸缩中最常用的算法,通常由以下要素描述。
(1)探索率
。强化学习类似于一个试错的学习,需要从智能体与环境的交互中发现优的策略,同时又不至于在试错的过程中丢失太多的奖励。本文使用在探索和利用之间进行权衡的标准策略——
贪婪策略。其中,探索(发现新的路径)和利用(选择当前最佳)就是进行决策时需要平衡的两个方面。所以,当选择动作时,会以一定的概率
选择随机动作,进行那些未知领域的探索。
(2)状态
。状态
表示观察到的环境状态。形成状态空间的候选因素很多,例如,响应时间、CPU利用率、内存利用率、I/O利用率等。因为CPU利用率可以最有效地反映应用程序的资源利用率,并且响应时间可以最直观地反映用户体验,所以本文选择CPU利用率和响应时间来确定状态空间。在本文中每一个智能体组拥有
个实例,用
=[
,
]表示实例
的状态,其中,
是实例
的CPU利用率,
表示实例
的最新平均响应时间。相应地,状态
表示为
=[
,
,,
]
(2)
本文将CPU利用率离散化为
个等级,平均响应时间离散化为
个等级,则状态空间规模为(
)
。
(3)动作
。动作
指根据观察到的环境状态所采取的策略。本文的动作空间包含水平动作和垂直动作。水平动作
取值范围为(-1,0,1),表示增减的实例数。每个实例的垂直动作
v
取值范围也是(-1,0,1),表示该实例增减的CPU资源量。本文假设每个CPU资源处理能力相同且每个实例具有一个共同的CPU上限。每次学习得到动作空间
表示为
=[
,
,
,,
v
]
(3)
不难算出,动作空间大小为3
+1
。相应地,本算法
表规模为
=(
)
3
+1
。
通过逻辑分组,本文提出算法中的状态和动作空间规模不再随实例数量变化而变化,解决了传统基于RL的资源伸缩算法的动作空间和状态空间维度爆炸问题。并且,最终执行的水平动作
是多个智能体组学习结果的汇集,最终的水平动作取值范围为
-
≤
≤
(4)
当负载急剧增加时,最多可以增加
个实例,可以保证达到系统性能要求的速度,而且也避免了设置水平伸缩动作空间时面临的性能与稳定性的取舍问题。
(4)奖励
。基于
学习的资源自动伸缩算法的最终目的是保证服务QoS和资源利用率。所以,本文中
学习的奖励
由QoS和CPU利用率两个部分组成。
QoS代表了用户的要求及满意度。当系统负载上升造成服务资源不足时,会造成服务QoS下降,用户体验变差。通常QoS有可用性、响应时间、吞吐量、可靠性等度量指标。本文将智能体组内平均响应时间
作为QoS指标,响应时间定义为从任务提交到完成的等待时间。
尽管当CPU利用率低时可以为用户带来较高的QoS,但是也意味着资源浪费,增加了应用运行成本。因此,在
中应考虑资源利用率,本文中即指智能体组内CPU利用率
,该参数可以帮助决策朝着提高资源利用率方向发展。
为了在保证QoS的情况下尽可能提高CPU利用率,本文设定奖励函数
为
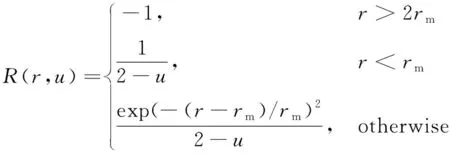
(5)
25if
>
then
3 实验对比与分析
3.1 工作负载构建与RL参数设置
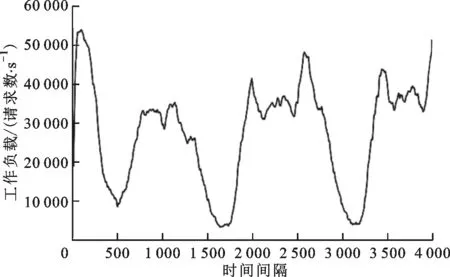
实验环境被仿真为一个云计算应用,一开始具有60个应用实例。仿真中使用的应用程序工作负载如图3所示,这种工作负载模式是通过重放由Gulisano等收集的实际应用程序数据集而产生的
。工作负载以请求的方式添加到应用程序的负载均衡器,负载均衡器按照各实例的CPU资源量以相应的概率将请求发送到实例的任务队列中,当实例空闲则会从任务队列中取出任务并完成。另外,为了模拟实际情况中可能会出现的单个实例的局部问题,本文随机选择若干个时间间隔,使某个实例堆积过量任务。
本文采用恒定的学习率
=0
05和折现因子
=0
9,探索率
被初始化为1,并从1减小到0
1以便在使用
贪婪策略学习的初始迭代中提供更高的探索能力,算法训练次数为10
。每个实例的最大CPU资源量设置为7,实例默认CPU资源量为4,
设置为1 s。阈值组的伸缩规则为当实例CPU利用率超过80%时增加一个CPU,当利用率低于40%时减少一个CPU。当应用实例数小于
时,即无法组成一个智能体组时,则根据应用的全局CPU利用率以同样的阈值规则做水平伸缩。
3.2 评价指标
为全面衡量算法性能,本文除平均CPU利用率和平均响应时间外,增加了违反QoS的百分比和平均CPU资源量两个指标。评价指标体现了应用性能和运行成本,这是使用云或边缘云时需要衡量的重点
。本文将响应时间超过2 s的请求视为违反QoS的请求,违反QoS百分比即违反QoS的请求数与总请求数的比值。
政策性农业保险费用是由中央和地方财政统一承担,中央占40%,省级占20%,市县占20%,农户占20%。如果财政部门补贴资金由于当年的财政发生问题而没有发放,保险公司对农户的理赔将无法顺利进行,这会对农户正常利益造成影响。甘肃省属于经济欠发达地区,经济建设发展速度过慢。由于近几年各种农业保险险种的增加和范围的扩大,很容易导致财政预算过大、无法及时发放的问题,不但会影响保险公司进行理赔,也会对地区创新保险险种造成影响。如果政府在当年财政预算中对于农业保险的补助相应减少,也会影响保险的发展。
此外,为了综合评估算法,本文从文献[21]中引入归一化成本
(
,
)=
+
+
(6)
资源伸缩决策通常是对系统性能下降的响应。但是,应用程序的特性、工作负载变化、资源共享冲突等因素都可能影响性能。因此,云环境中资源伸缩方案需要具有较强的学习能力和自适应性。
比较原文献的实验结果后,本文选择第3种权重分配方式,因为该方式平衡了3种部署目标,在原文献中表现最佳。
3.3 对比算法
为了评估BGRL的性能,将BGRL与基于阈值的水平伸缩算法THS、基于强化学习的分组的水平伸缩算法HGRL以及近期的文献[21]中的算法HVSRL做比较。HVSRL是根据全局状态来进行水平伸缩和垂直伸缩的强化学习算法,其中垂直伸缩是所有实例同步伸缩,并未细分到单个实例。在THS算法中本文设置CPU利用率上下限分别为80%和40%,当应用程序的全局CPU利用率超过上限时则增加一个实例,当CPU利用率低于下限时则删除一个实例。通过与最常见的基于阈值的伸缩算法比较,可以评估BGRL的常规性能。HGRL是BGRL删除垂直伸缩功能的退化算法,通过与该算法比较,可以评估垂直伸缩对于应用性能的提升,以及凸显出现局部性能问题时垂直伸缩的作用。
3.4 实验结果与分析
考虑到算法准确性与稳定性之间的权衡,需要选择适当的
。由式(1)可以看出
决定了如何进行逻辑分组:
较大则算法状态空间和动作空间大,学习时并行度小,算法训练时间长;
较小则每次训练包含的应用信息少,算法准确性会下降。而且,水平动作
的上下限
由
和实例数
决定。较小的
可能会使系统不稳定,极端情况如当
=1时,每个实例自成一个智能体组,可能某个时间段内工作负载少,所有组学习到的水平动作都是减少一个实例,则下一个时间段内应用将无实例,较大的
则会使系统在负载急剧变化时来不及做出适当调整,产生大量违反QoS的请求。因此,本文首先比较了不同
时的算法效果,结果如表1所示。
该系统往往与电网企业办公大楼中其他非数据中心区域设备(如办公空调)共用,根据PUE的定义,只需统计系统与数据中心关联的部分耗电量,而此部分耗电量难以直接测量,只能通过估算的方法得出,具体如下:
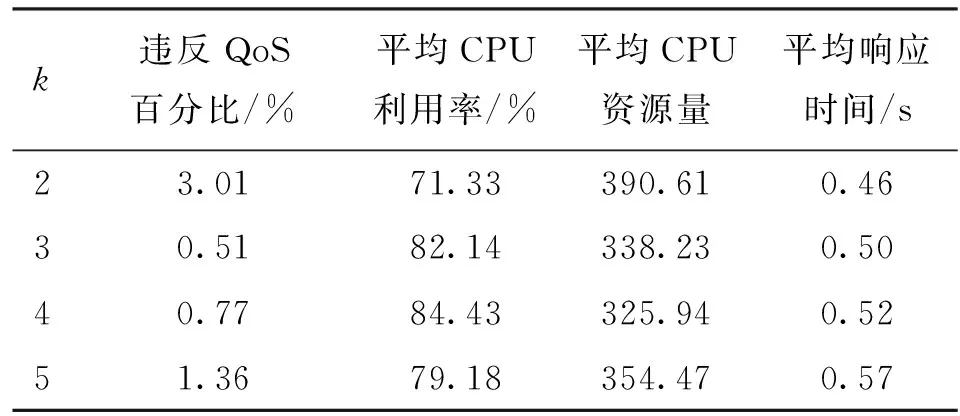
从表1中可以看出,当
=3,4时算法表现较好。
=3时算法违反QoS百分比最低,仅为0.51%,CPU利用率较高,超过了82%,使用CPU资源量较少;
=4时算法的CPU利用率最高,达到了84.43%,使用的CPU资源量最少。考虑到实际场景中减少违反QoS百分比更为重要,本文选择
=3。
=3时BGRL和其他3种算法的实验结果如图4~7所示。
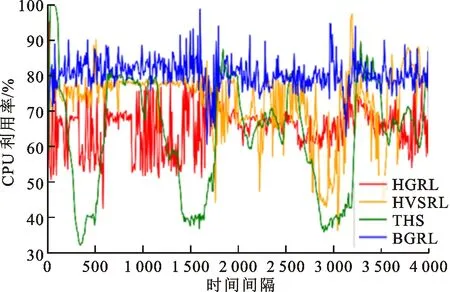
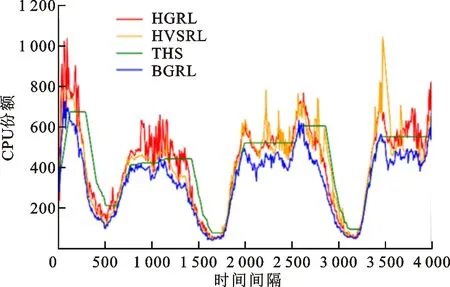
从图4和图5可以看出,当面对工作负载急剧上升的情况时,THS需要多个时间间隔才能增加足够的实例以满足应用需求,在此期间THS的CPU利用率将达到100%,必然产生大量违反QoS的请求。THS只在CPU利用率超过阈值范围时才进行伸缩。从图5可以看出,THS存在许多资源量连续不变的时间间隔,可见THS对负载的变化不敏感,而且THS伸缩变化慢,所以THS的CPU利用率曲线和工作负载变化的曲线相似。
与此不同的是,3种强化学习算法都通过自适应伸缩使自身的资源量与工作负载相对应,所以图5中3种强化学习算法的CPU资源量曲线与工作负载曲线相似,图4中3种强化学习算法的CPU利用率也较为稳定。但是,HSVRL的状态空间是整个应用的全局状态,根据全局状态选择全局动作,其垂直伸缩动作是所有实例同步垂直伸缩,所以HSVRL的曲线会出现较大波动,如图4和图5中时间间隔在3 500左右时HSVRL的变化。与BGRL相比,HGRL只能进行水平伸缩,无法对实例进行细粒度调节所以其资源量变化较大。BGRL使用了虚拟分组,可以选择恰当的水平伸缩动作以及具体到单个实例的垂直伸缩动作,所以表现最优,使用的CPU资源量最少最贴合负载变化,CPU利用率最高最稳定。
本研究发现,在卵巢恶性肿瘤中,B7-H4和(或)B7-H6蛋白的表达率为91.38%,高于其在卵巢良性肿瘤中的表达率(27.91%,P<0.05),提示其与卵巢恶性肿瘤的发病密切相关。本研究结果还显示,B7-H4和(或)B7-H6蛋白的表达率与患者年龄、组织类型、p53蛋白表达情况有关(P<0.05),但未显示其与组织分化程度、FIGO临床分期及CA125表达情况的相关性,可能与样本量较小有关。此外,本研究中的标本均为石蜡标本,由于包埋固定剂与抗原交联作用,会封闭一部分抗原,且固定时间越久,抗原封闭的越多,使弱表达的抗原呈现假阴性,也可能导致结果偏倚。
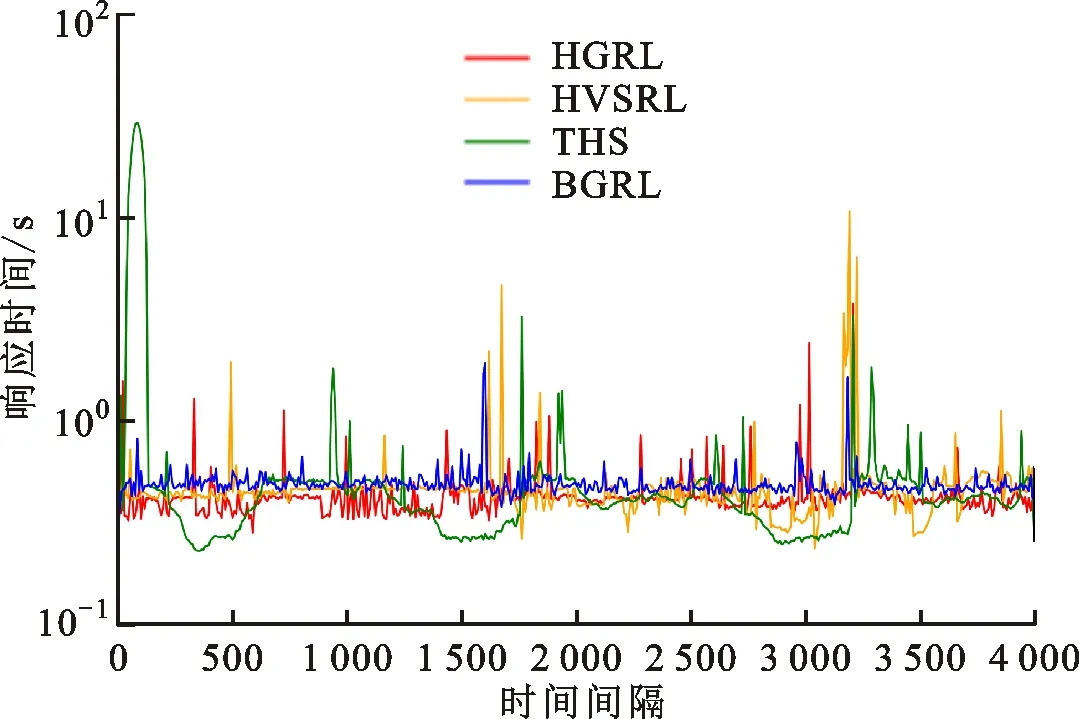
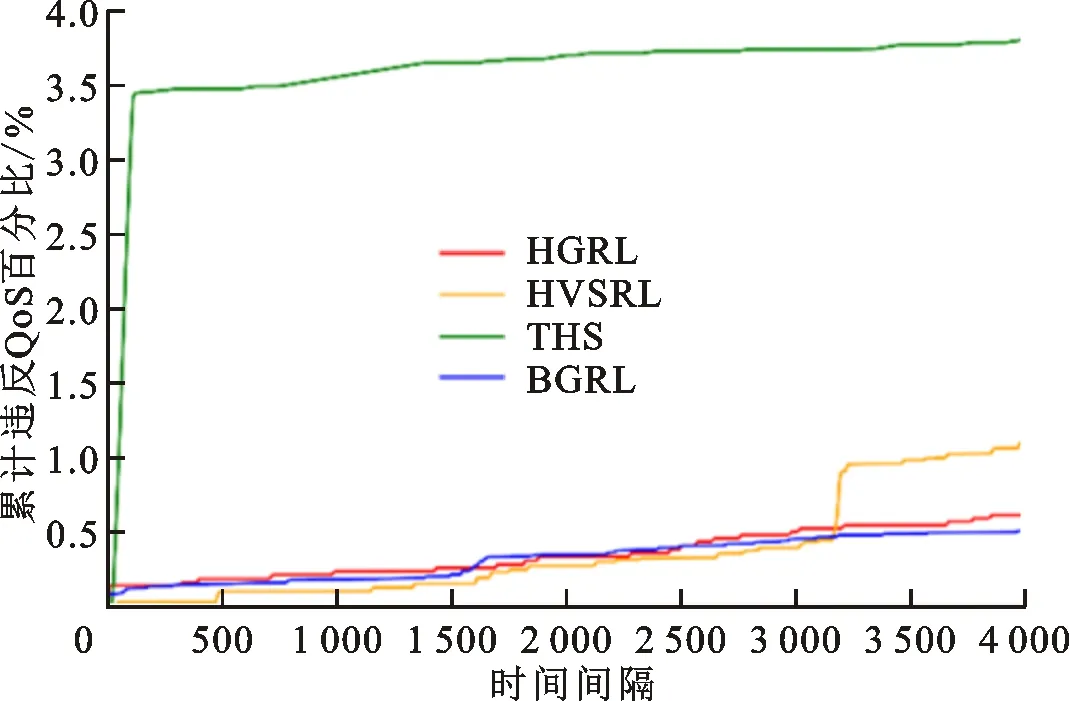
违反QoS通常由两种情况造成:①负载急剧增加时应用资源不够;②没有解决实验中模拟的个别实例出现的局部问题。从图7可以看出,面对一开始负载急剧增加的情况,THS由于扩展不及时而产生了大量的违反QoS的请求,图6中相应位置也可以看到此时THS的平均响应时间很长,而3个强化学习算法都解决了该问题。另外,THS和HGRL只能进行水平伸缩而无法有效处理局部问题,HVSRL是根据全局状态对所有实例同步垂直伸缩,所以并不总是能解决局部问题,反而可能因为不恰当的动作产生更多违反QoS的请求。本文提出的BGRL算法收集每个实例的信息并将垂直伸缩动作细分到单个实例,可以快速地解决局部问题,表现最好,平均响应时间最稳定,违反QoS百分比最小。
表2展示了4种算法在实验过程中的违反QoS百分比、平均CPU利用率、平均CPU资源量、平均响应时间以及归一化成本
等。
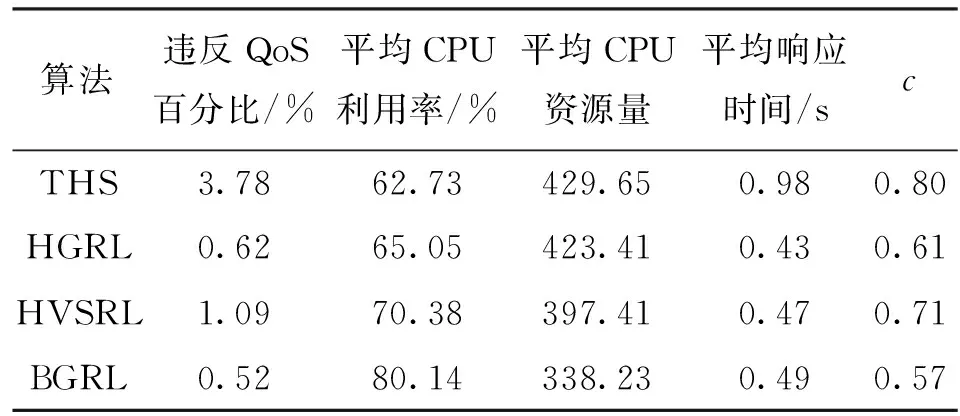
从表2可以看出,与THS相比,3个强化学习算法在违反QoS百分比和平均响应时间方面都有明显改善,这主要是因为在实验一开始负载急剧增加时,强化学习算法处理效果较好。BGRL通过细粒度的垂直伸缩使其在违反QoS百分比、平均CPU利用率、平均CPU资源量等方面表现最优,分别为0.52%,80.14%以及338.23。但是,在平均响应时间方面不如HGRL和HVSRL,这是因为HGRL和HVSRL总是使用了更多的CPU资源,正常情况下请求能更快被处理。在归一化成本
方面,虽然HVSRL与HGRL在CPU资源量和违反QoS百分比上各有优势,但是前者的
比后者要大0.1,这主要是因为垂直伸缩需要付出额外成本。BGRL虽然也包含垂直伸缩,但在违反QoS百分比和使用的资源量上改善明显,所以BGRL的
最小。
4 结 论
本文提出了一种解决云中资源自动伸缩问题的算法BGRL,该算法结合了水平和垂直两个方向上伸缩的优势。BGRL使用了逻辑分组,将应用实例分为了若干个智能体组和一个阈值组,使伸缩问题的规模固定,算法可伸缩性不再受限,多个智能体组共同学习使应用总是能采取恰当的混合式伸缩。通过仿真实验,证明了本文混合式伸缩算法的明显优势。实验结果显示,与现有算法相比,BGRL使应用资源量更贴合负载变化,系统稳定性更高,在保证QoS和减少使用的资源上表现优异。
在未来的工作中,将考虑如何预测工作负载变化,并将其作为强化学习的状态之一,以实现更符合应用需求的自动伸缩。
:
[1] ZHANG Jian, YANG Yang, WANG Zhibo. Outsourcing large-scale systems of linear matrix equations in cloud computing [C]//Proceedings of the 2016 IEEE 22nd International Conference on Parallel and Distributed Systems (ICPADS). Piscataway, NJ, USA: IEEE, 2016: 438-447.
[2] 龚强. 云计算关键技术之弹性伸缩控制技术认知研究 [J]. 信息技术, 2014, 38(1): 1-2, 6.
GONG Qiang. Research on the cognition of elastic retractable control technology: one of the key technology of cloud computing [J]. Information Technology, 2014, 38(1): 1-2, 6.
[3] DEAN J, BARROSO L A. The tail at scale [J]. Communications of the ACM, 2013, 56(2): 74-80.
[4] AL-DHURAIBI Y, PARAISO F, DJARALLAH N, et al. Elasticity in cloud computing: state of the art and research challenges [J]. IEEE Transactions on Services Computing, 2018, 11(2): 430-447.
[5] SINGH P, GUPTA P, JYOTI K, et al. Research on auto-scaling of web applications in cloud: survey, trends and future directions [J]. Scalable Computing: Practice and Experience, 2019, 20(2): 399-432.
[6] LORIDO-BOTRAN T, MIGUEL-ALONSO J, LOZANO J A. A review of auto-scaling techniques for elastic applications in cloud environments [J]. Journal of Grid Computing, 2014, 12(4): 559-592.
[7] 李茹杨, 彭慧民, 李仁刚, 等. 强化学习算法与应用综述 [J]. 计算机系统应用, 2020, 29(12): 13-25.
LI Ruyang, PENG Huimin, LI Rengang, et al. Overview on algorithms and applications for reinforcement learning [J]. Computer Systems & Applications, 2020, 29(12): 13-25.
[8] 易鸣. 基于微服务架构应用平台的资源调度优化研究 [D]. 济南: 山东大学, 2020: 9-11.
[9] 王天泽. 基于灰色模型的云资源动态伸缩功能研究 [J]. 软件导刊, 2018, 17(4): 131-134.
WANG Tianze. Research on cloud resources auto-scaling based on grey model [J]. Software Guide, 2018, 17(4): 131-134.
[10]尚小东, 张煜, 郭成昊. 基于作战任务优先级的容器云弹性伸缩系统 [J]. 指挥信息系统与技术, 2020, 11(3): 36-43.
SHANG Xiaodong, ZHANG Yu, GUO Chenghao. Container cloud elastic scaling system based on mission priority [J]. Command Information System and Technology, 2020, 11(3): 36-43.
[11]SHEKHAR S, ABDEL-AZIZ H, BHATTACHARJEE A, et al. Performance interference-aware vertical elasticity for cloud-hosted latency-sensitive applications [C]//Proceedings of the 2018 IEEE 11th International Conference on Cloud Computing (CLOUD). Piscataway, NJ, USA: IEEE, 2018: 82-89.
[12]KARDANI-MOGHADDAM S, BUYYA R, RAMAMOHANARAO K. ADRL: a hybrid anomaly-aware deep reinforcement learning-based resource scaling in clouds [J]. IEEE Transactions on Parallel and Distributed Systems, 2021, 32(3): 514-526.

[14]ASLANPOUR M S, GHOBAEI-ARANI M, NADJARAN TOOSI A. Auto-scaling web applications in clouds: a cost-aware approach [J]. Journal of Network and Computer Applications, 2017, 95: 26-41.
[15]ALI-ELDIN A, TORDSSON J, ELMROTH E. An adaptive hybrid elasticity controller for cloud infrastructures [C]//Proceedings of the 2012 IEEE Network Operations and Management Symposium. Piscataway, NJ, USA: IEEE, 2012: 204-212.
[16]PATIKIRIKORALA T, COLMAN A. Feedback controllers in the cloud [C]//Proceedings of the 2010 APSEC. Sydney, Australia: APSEC, 2010: 39.
[17]GHOBAEI-ARANI M, JABBEHDARI S, POURMINA M A. An autonomic resource provisioning approach for service-based cloud applications: a hybrid approach [J]. Future Generation Computer Systems, 2018, 78: 191-210.
[18]ARABNEJAD H, PAHL C, JAMSHIDI P, et al. A comparison of reinforcement learning techniques for fuzzy cloud auto-scaling [C]//Proceedings of the 2017 17th IEEE/ACM International Symposium on Cluster, Cloud and Grid Computing (CCGRID). Piscataway, NJ, USA: IEEE, 2017: 64-73.
[19]HOROVITZ S, ARIAN Y. Efficient cloud auto-scaling with SLA objective using
-learning [C]//Proceedings of the 2018 IEEE 6th International Conference on Future Internet of Things and Cloud (FiCloud). Piscataway, NJ, USA: IEEE, 2018: 85-92.
[20]YANG Zhe, NGUYEN P, JIN Haiming, et al. MIRAS: model-based reinforcement learning for microservice resource allocation over scientific workflows [C]//Proceedings of the 2019 IEEE 39th International Conference on Distributed Computing Systems (ICDCS). Piscataway, NJ, USA: IEEE, 2019: 122-132.
[21]ROSSI F, NARDELLI M, CARDELLINI V. Horizontal and vertical scaling of container-based applications using reinforcement learning [C]//2019 IEEE 12th International Conference on Cloud Computing (CLOUD). Piscataway, NJ, USA: IEEE, 2019: 329-338.
[22]GULISANO V, JERZAK Z, VOULGARIS S, et al. The DEBS 2016 grand challenge [C]//Proceedings of the 10th ACM International Conference on Distributed and Event-based Systems. New York, USA: ACM, 2016: 289-292.
[23]LI Yuqing, DAI Wenkuan, GAN Xiaoying, et al. Cooperative service placement and scheduling in edge clouds: a deadline-driven approach[J/OL]. IEEE Transactions on Mobile Computing, 2021 [2021-06-01]. https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=9361310.
[24]YOU Wencong, JIAO Lei, LI Jun, et al. Scheduling DDoS cloud scrubbing in ISP networks via randomized online auctions [C]//Proceedings of the IEEE Conference on Computer Communications. Piscataway, NJ, USA: IEEE, 2020: 1658-1667.
猜你喜欢
当代水产(2022年8期)2022-09-20 06:47:12
矿产勘查(2020年11期)2020-12-25 02:55:46
超硬材料工程(2019年1期)2019-02-20 10:47:24
中国化肥信息(2019年6期)2019-01-19 13:10:42
经济技术协作信息(2018年5期)2019-01-19 08:39:16
消费导刊(2017年24期)2018-01-31 01:29:29
印制电路信息(2015年6期)2015-12-30 12:57:48
高中生学习·高三版(2014年3期)2014-04-29 06:11:18
高中生学习·高三版(2014年3期)2014-04-29 06:10:49
电力工程技术(2012年5期)2012-03-25 10:40:44
