
交互式智能导引机器人在检修厂房的应用
2022-02-11 05:58刘康宁吕崇伟丁春嵘许衍根
机器人技术与应用 2022年6期
刘康宁 吕崇伟 丁春嵘 许衍根
(国能铁路装备有限责任公司沧州机车车辆维修分公司,河北沧州,061113)
0 引言
铁路是关系国计民生的基础产业,是社会经济健康发展的重要保障。铁路行业承担着运输煤炭等各行业生产和消费环节物资的任务,每个环节都需要投入大量的人工进行操作、调度与维护,尤其是机车车辆维修车间还承担着参观、学习、交流等繁重的任务[1]。故将智能机器人引入到铁路装备系统中,代替人工执行接待、讲解、答疑的工作,可极大地降低讲解错误率,提升讲解效率,提升铁路信息自动化程度,同时还可以解决传统文字讲解方式信息量大、难以充分宣传铁路各方面发展成果的难题。
智能化和无人化将是机车车辆维修车间未来重要的发展方向。本文阐述了交互式智能导引机器人(以下简称导引机器人)的优点和应用现状,分析了导引机器人的关键技术,并探讨机器人未来的研究挑战与发展趋势。
1 导引机器人的优势
本文设计的导引机器人主要应用于铁路装备机车车辆维修车间,旨在代替或辅助讲解员执行接待、讲解、答疑等任务。
机车车辆维修车间作业环境复杂,场景多变,讲解员工作强度大、效率低,讲解内容主观性强,导引机器人不仅可以克服和弥补人工作业中存在的缺陷和不足,还可以发挥机器人讲解的灵活性和智能性,进而确保参观、学习、交流工作稳定、安全地进行,提高车间生产运维效率和水平。导引机器人的具体优势主要表现在以下几个方面。
1)受外界环境影响较小。
导引机器人可以24h无休地进行接待、讲解工作,通过搭载的激光雷达传感器构建所需讲解区域的二维地图,激光实时扫描特征点在地图中进行匹配,完成定位导航功能,不受外界环境干扰,重复定位精度≤5cm[2]。机车车辆维修车间安装有铁轨等设备,这增加了导引机器人跨越的难度。导引机器人采用多传感器融合方式,使用激光雷达传感器、深度摄像头、超声波传感器等互相弥补探测盲区,以实现运动中遇到障碍物停止的功能。导引机器人整机外观如图1所示。

图1 导引机器人整机外观
2)标准化执行和智能沟通。
导引机器人安装有麦克风阵列,可以实现日常简单的人机语音交互;导引机器人的屏幕上还可以播放讲解的视频;导引机器人的路径规划无需对实际环境做任何改变,而是在构建的地图上直接进行停靠点设置,以及虚拟巡线路径的规划,导引机器人在实际场景中沿着规划的虚拟路径依次到达相应的讲解停靠点[3]即可。导引机器人架构设计如图2所示。
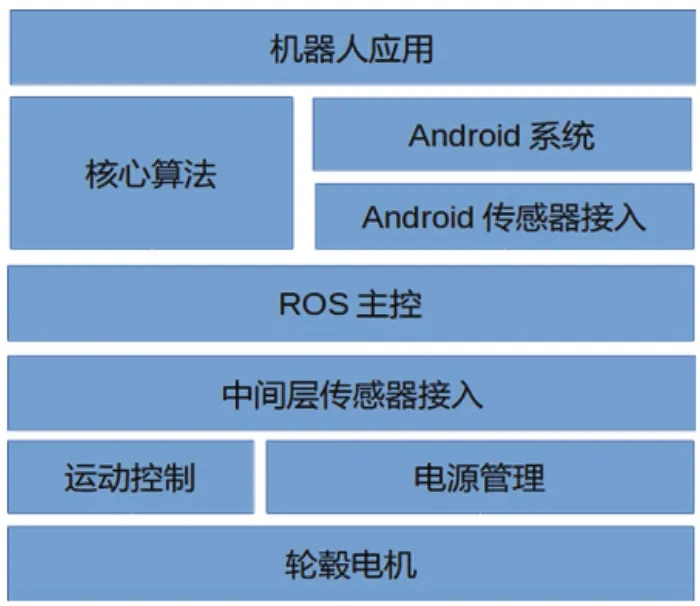
图2 导引机器人整体架构设计
3)讲解准确性高。
导引机器人在执行讲解任务时,可极大地提升讲解效率,降低讲解错误率,提升机车车辆维修车间信息自动化程度,解决传统文字讲解方式信息量大、难以充分宣传铁路各方面发展成果等问题。传统人工讲解和导引机器人讲解效果对比情况如表1所示。
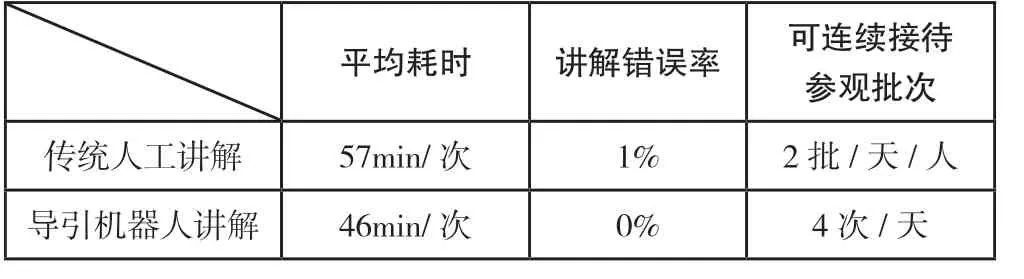
表1 传统人工讲解和导引机器人讲解效果对比
4)减少人工工作量。
通过运用大数据及人工智能(AI)模型的搭建,整个系统可以提升机器人讲解内容的精准性。机器人后台服务器具备建模的拓展功能,并能对构建的模型进行训练修正,以减少人工手动纠错的工作量,提高工作效率。
2 导引机器人应用分析
目前,各类机器人系统已经在多个行业中得到应用,其性能已经趋于稳定,对工作量大、重复性强的作业尤为适用。机器人系统不受工作时间及劳动强度等的限制,工作效率得到很大提高,另外,其综合图像识别、信息采集及管理技术,在各类应用上的效果也十分显著。
导引机器人主要的应用场景是铁路装备机车车辆维修车间。机车车辆维修车间承担参观、学习、交流等繁重的任务,存在讲解时间周期长、任务量大、重复性强、人为因素影响大、信息化程度不高等缺点,引入导引机器人,可以将自动化和信息化深度融合,实现讲解作业的自动化和智能化。
导引机器人采用两轮驱动底盘和多传感器融合技术,结合人工智能技术,完成讲解任务。在机车车辆维修车间的作业中,导引机器人可以降低人工讲解的压力和工作强度,减少人为因素对讲解过程的干扰,提升作业效率,提高讲解质量和信息化水平。基于人工智能技术的机器人得到长久的发展和广泛的应用,这些应用为用户带来了显著的效益。
3 导引机器人关键技术
3.1 定位导航技术
导引机器人配备有激光导航传感器,利用软件工具进行环境地图的绘制,保存环境地图后,导引机器人根据控制端指令自动设置路线,实现单点或多点控制移动,以及巡线模式移动;导引机器人可以实时地向控制端反馈机器人当前位置、方向和前进路线[4]。
SLAM定位导航系统是机器人从未知环境的未知地点出发,在运动过程中通过重复观测到的环境特征定位自身位置和姿态,再根据自身位置构建周围环境的增量式地图,从而达到同时定位和地图构建的目的。其核心过程主要包括3个步骤:第一步是预处理,利用算法代码对激光雷达的原始数据进行优化,对有问题的数据进行剔除或者进行滤波处理;第二步是匹配,把当前局部环境的点云数据在已经建立的地图上寻找对应的位置,该步骤对于SLAM导航系统非常关键;第三步是地图融合,将来自激光雷达的新数据拼接到原始地图中,最终完成地图的更新,这一过程在SLAM定位导航系统中一直持续进行。
激光雷达地图数据融合过程如图3所示。
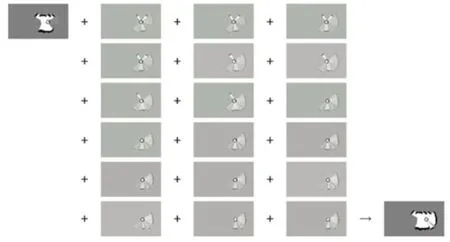
图3 激光雷达地图数据融合过程
3.2 运动控制技术
导引机器人的运动本体采用双轮差动的车体结构,在车体底部前方左右两侧安装差速轮作为驱动轮,车体后方的两个车轮均为万向轮。差速轮不需要配置转向电机,它本身不能旋转,转向时的半径、速度、角速度都是靠内外驱动轮之间的速度差来实现转向。这种运动模型的优点在于灵活性高,可以实现原地打转等动作。导引机器人底盘运动控制设计如图4所示。
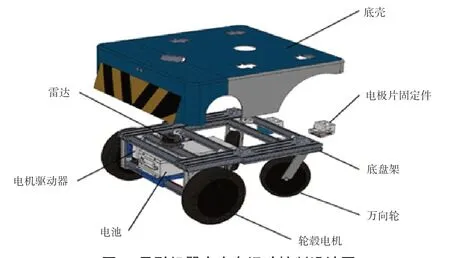
图4 导引机器人底盘运动控制设计图
3.3 自动避障技术
通过增设电子地图虚拟墙和硬件传感器,可以有效地防止导引机器人在机车车辆维修车间工作时,碰撞到行人或现场设备等。在设有虚拟墙的位置,导引机器人通过激光雷达传感器实时扫描行走区域的地图与原始地图进行匹配,将下一秒要进入的地图坐标与禁行区的坐标做计算,确保机器人不会主动进入禁行区域[5]。同时,导引机器人本体上安装了多种类型的传感器,以达到对行人、设备等的防碰撞保护的目的。导引机器人电子地图避障如图5所示。

图5 电子地图避障示意图
3.4 智能语音对话技术
导引机器人采用多麦克风阵列技术,可以在人机对话时,有效地实现噪声抑制和回声消除功能;拾音距离达到5m,同时具备360。声源定位和人声分离的功能,可以准确地识别讲话人的语音内容[6]。此外,导引机器人实现了高性能、低功耗、低延迟的语音技术的本地化(导引机器人本体上实现),采用经过1万小时机器学习的训练语音数据进行语音识别。
4 发展与趋势
目前,导引机器人在铁路装备行业已得到广泛应用,机车车辆维修车间实现无人化、智能化管理也将成为必然趋势。未来导引机器人的发展将表现在以下几个方面。
1)多传感器融合,数据分析多维化。
未来导引机器人将逐步集成多个传感器,运用多源融合技术采集多种类型的数据进行地图的特征提取和分析,从而进行更精准地位置定位。
2)拓展作业需求,执行操作灵巧化。
目前导引机器人还不具备巡检设备的能力,随着自动化和智能化的发展,未来导引机器人可以在进行讲解任务的同时,实现末端执行器的灵巧操作,如对计量仪表(压力表、气压表、温度计、压力计等)进行读取,阀门开关状态的判断等,更大程度地减轻作业人员的工作压力。
3)组合作业模式,任务处理集成化。
在未来应用中,现场环境的复杂性和特殊性促使导引机器人将具备多任务处理能力,以及实现多种作业方式集成化,如将机器人巡检功能与讲解功能相结合,提高作业能力和效率,实现机器人各系统的信息共享。
猜你喜欢
北京测绘(2022年5期)2022-11-22
汽车观察(2021年8期)2021-09-01
中国交通信息化(2019年1期)2019-03-26
电子制作(2018年16期)2018-09-26
科学中国人(2018年1期)2018-06-08
山东工业技术(2016年15期)2016-12-01
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
铁道货运(2013年2期)2013-08-07
