
测量机器人在地铁隧道自动化变形监测中的应用
2022-02-09 02:51方齐乐
资源导刊(信息化测绘) 2022年12期
方齐乐
(深圳市市政设计研究院有限公司,广东 深圳 518029)
1 引言
随着城市化进程的加快,地下空间已成为人们生产和生活的重要活动场所。测量机器人是一种能够进行目标自动搜索、识别、跟踪和精确照准,并获得角度、距离和三维坐标等信息的自动化智能型电子全站仪[1]。测量机器人系统集自动目标识别、自动照准、自动测距、自动测角、自动跟踪目标、自动记录于一体,可以实现测量的全自动化[2]。
地铁隧道监测具有高精度、高频率和高时效性特点,但是地下空间环境复杂,存在安全隐患。以往主要有自动化静力水准、人工测量和测量机器人等监测方法。静力水准沉降监测可实现自动化,但仅能提供一维沉降信息,存在一定的局限性;人工测量存在人为照准误差,费时费力,而且无法全天候获取多方位数据,出报表周期长。长期以来测量机器人以其高精度、自动编程、高智能照准和识别目标等优点,在大型水库、大坝、桥梁和山体滑坡自动化监测中的应用日益广泛[3,4]。本文以深圳地铁1 号线自动化变形监测为例,在某临近建筑深基坑施工周期内,采用测量机器人对地铁隧道的结构整体变形情况进行监测,为地铁运行实时提供高准确度的动态监测数据,通过对各变形监测点的变形量与预警值进行比较和分析,研判地铁形变的变化趋势,为地铁隧道施工提供了数据指导,为项目施工期间地铁隧道的结构安全和正常使用提供了保障。
2 工程概况
项目位于城市商务中心的核心地段,城市轨道交通1 号线西南侧,该基坑属超深基坑,长约380m,宽约180m,开挖深度20m ~27m。项目场地东北侧为在运营的地铁1 号线区间隧道,上行线隧道距离坑边最小约37.5m,下行线隧道距离坑边最小约50.7m,东北侧部分基坑在轨道交通设施保护范围内。
受建设项目基坑开挖影响,地铁隧道区间约260m范围隧道发生沉降偏移。目前地铁已限速行驶,考虑后续项目仍需施工,需对影响段隧道进行纠偏回调。为确保地铁运营安全,工程综合采用卸载、注浆加固和控制注浆的方法加固受影响区段地层,并回调隧道变形。在注浆纠偏试验过程中需严密监控隧道及隧道周边土体的变化情况,为现场纠偏施工提供数据指导。
3 技术路线
本项目采用自动化监测为主、人工监测为辅的监测方法,采用Lecia TS50 测量机器人与Geomos 专业监测软件配套使用的方式,实现地铁隧道的自动化监测。同时基于Visual Basic 语言设计海量自动化监测数据处理程序并进行数据处理。监测系统如图1 所示。
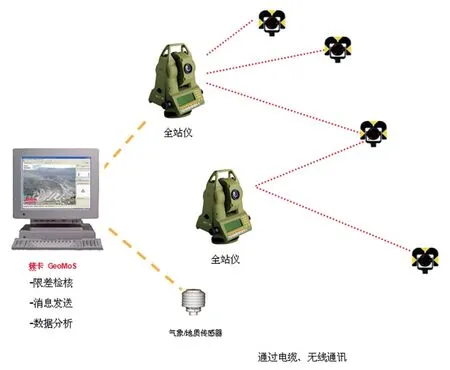
图1 自动变形监测系统
监测的基本思路为:接到业主委托任务→资料收集、分析→现场踏勘→组织专业技术人员拟定监测方案、技术标准→组织专家对技术设计文件进行评审论证→进行现场监测布点、仪器布设等工作→仪器调试→自动化监测系统建立→监测内业处理→成果检查、校核→成果表、技术报告→验收→成果归档、交业主→后期服务。
4 监测系统介绍
4.1 仪器设备及监测系统
系统硬件部分主要有徕卡TS50 型自动全站仪、棱镜连接器、目标棱镜、计算机、网络通信设备、电源箱[5-7]。(1)徕卡TS50 型自动全站仪。利用测量机器人高智能自动识别系统对测量目标点进行水平角、垂直角、距离数据的采集。(2)棱镜连接器。将棱镜固定在全站仪脚架上或固定监测墩子点位,使之成为测站或镜站。(3)目标棱镜。目标棱镜一般均匀安装在变形监测目标点和基准点上。(4)计算机。计算机监测软件通过控制测量机器人实现自动化监测。(5)网络通信设备。通过有线或无线方式建立一个专用的通讯链路,实现全站仪和监控计算机之间的数据通信。(6)电源箱。为测量机器人等设备提供不间断电源[8-10]。变形监测设备组成如图2 所示。
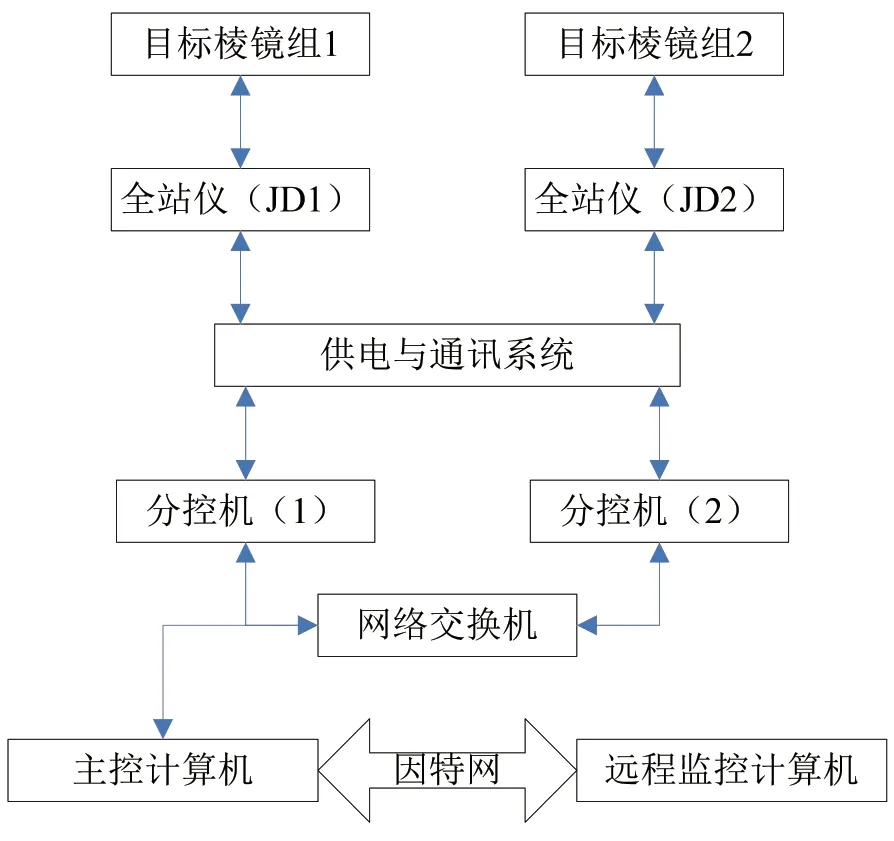
图2 变形监测设备组成
结合项目特点和规范要求,监测网测量要求和控制指标如表1 和表2 所示。

表1 监测网测量参数要求
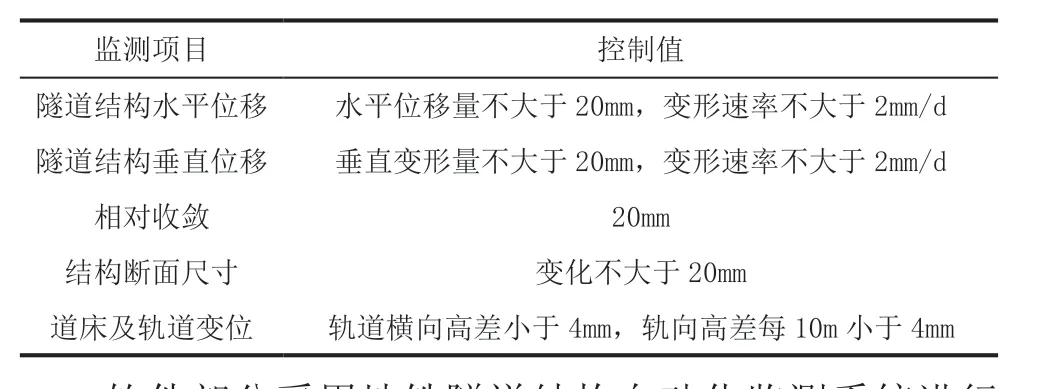
表2 地铁盾构区间结构监测项目控制指标
软件部分采用地铁隧道结构自动化监测系统进行管理。系统集变形监测数据采集、处理、分析、预警预报和传输分发为一体,形成高度智能的自动化安全监测管理系统。
4.2 自动化监测点的布设
根据规范和项目安全评估方案要求,结合基坑与地铁空间位置关系以及本工程应急抢险的特殊性,与基坑对应位置的隧道监测点断面间距按照5m 设置,每个监测断面布设5 个点位,如图3 所示,分别是拱顶1 个、侧壁2 个、道床2 个,隧道左线和右线共布置监测点2395 个,用于监测隧道结构平面位移、竖向位移、相对收敛、隧道尺寸、道床横向和竖向高差等内容。
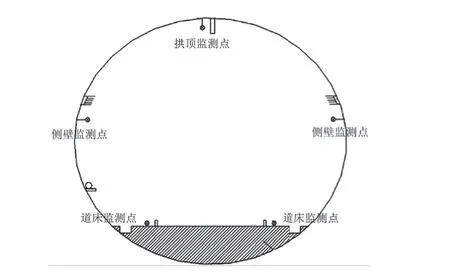
图3 隧道断面监测点位分布
4.3 监测系统优势
项目解决了人工监测只能地铁停运监测的局限性,实现了实时无线传输监测成果和预警、预报;同时基于Visual Basic 语言设计实现了海量自动化监测数据处理程序,可及时处理分析海量监测数据,大大提高内业工作效率,有效节约成本。海量自动化监测数据处理系统如图4 所示。
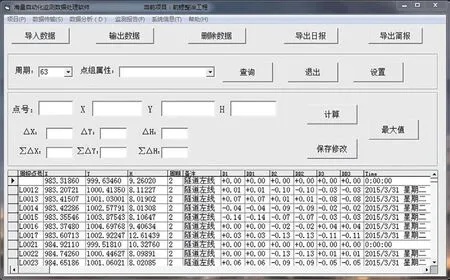
图4 基于VB的海量自动化监测数据处理系统
5 监测效果及分析
5.1 监测效果对比
自动化监测数据均由自主开发的程序进行处理,系统接收到各种监测数据后,能及时进行解算,计算变形量,评估隧道结构物的安全性。项目监测周期从2019 年3 月持续到11 月。在隧道区间内左右线共布设342 个监测断面,在监测周期内,项目结合自动化监测和人工水准监测方法,对比分析同时段的两种监测成果,以评估自动化监测系统的可靠性。当自动化与人工监测成果相差大于 (m人为当期人工监测中误差,m自为当期自动化监测中误差)时,通过控制系统调整设备参数,更换监测频率,分析查找两种监测成果差异较大原因,解决列车震动、施工、气流等因素对监测精度的影响。以人工(二等水准和三等导线)和自动化垂直位移为例,对比分析同期左、右线两种监测方式下垂直位移阶段变化量曲线,如图5和图6 所示。
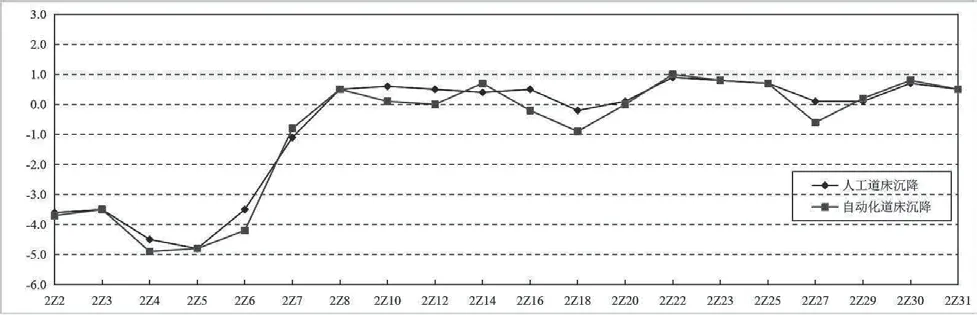
图5 地铁左线自动化与人工阶段沉降量曲线图(mm)
图6 地铁右线自动化与人工阶段沉降量曲线图(mm)
5.2 精度对比分析
(1)距离的差分改正:因气象元素的距离大气折射率等因素,可利用基准站和各监测站的已知距离,解算距离气象改正比例系数,进而实现实时差分改正。
(2)球气差的改正 :因球气差对高差测量的影响,基于精密水准测量可知监测站和基准点间的高差,利用变形监测高效快捷的特点(球气差改正系数),解出变形点与监测点经球气差改正的三角高差和平距。
(3)方位角的差分改正:因大气水平折光和水平度盘零方向的变化等,无法保证仪器在长期变形监测过程中的绝对稳定,故需考虑水平方位角差分改正。
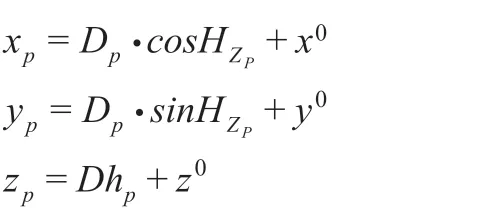
(4)变形点三维坐标和变形量的计算:基于距离和方位角两项的差分改正,按极坐标计算公式可准确求得每周期各变形点的三维坐标。
6 结语
本文结合项目实施情况,验证了测量机器人自动化实时监测的技术要点,达到预期效果。通过测量机器人在工程中的具体应用,采用网络数字化的监测技术简便灵活,避免了人为测量误差,降低了劳动成本,提高了工作效率。该方法为基坑开挖引起的地基变形提供了准确及时的数据,积累了丰富的监测经验,对于保障地铁隧道安全运营具有重大意义。
猜你喜欢
煤气与热力(2022年4期)2022-05-23
水利水电科技进展(2021年6期)2022-01-07
中华诗词(2020年1期)2020-09-21
水电站设计(2020年4期)2020-07-16
中国外汇(2019年6期)2019-07-13
小读者(2019年24期)2019-01-10
小学生作文(中高年级适用)(2018年5期)2018-06-11
中学生数理化·七年级数学人教版(2017年11期)2017-04-23
数学大王·中高年级(2016年12期)2016-12-26
小天使·四年级语数英综合(2016年11期)2016-11-29
