
无人机架空线路巡检技术发展现状及展望
2022-02-06 02:48冯建辉姜虹云李朋岳周朝荣
云南电力技术 2022年6期
冯建辉,姜虹云,李朋岳,周朝荣
(1.云南电网有限责任公司怒江供电局,云南 怒江 673100;2.云南电网有限责任公司,云南 昆明 650000;3.云南电网有限责任公司文山供电局,云南 文山 663000)
0 前言
无人机架空线路巡检相比于人工巡检从安全、效率、质量等方面都有了质的提升,利用无人机进行巡检已经成为电力巡检智能化的必然选择。但是随着无人机在线路巡检中的逐步应用,一些问题也逐渐暴露出来,本文针对无人机架空线路巡检在避障、通信、图像采集及识别、集群协同作业技术发展现状进行了分析及展望,为无人机架空线路巡检技术发展提供一定思路。
1 无人机架空线路巡检应用现状
目前开展架空线路巡检的无人机平台多为多旋翼无人机,现已有众多公司推出了面向电力巡检的行业无人机成品,如大疆推出的御2系列(如图1)、精灵系列、经纬300 系列无人机;南方测绘推出的智航系列无人机;千寻推出的X 系列行业无人机等。

图1 大疆御2行业进阶版无人机
这些无人机由飞控、电机、电池、图传、负载、地面控制终端构成,部分高端产品还搭载了避障系统,具有成本低、体积小、机动性强、操作简单、对场地依赖小等优点[1]。
在面对架空线路铺设的复杂地理环境,传统的人工巡线需要巡检人员徒步进入,通过人眼、望远镜等方式观察塔架情况,耗费时间长、效率低、危险性高、存在观察死角等问题[2],而巡线无人机无需人员到场,避免了地形、距离不利影响,同时利用其搭载的各类光学成像相机、红外相机、激光雷达等负载对架空线路进行多角度,全方位巡检及数据采集(如图2),并通过地面终端及专业软件进行处理[3],可以完成长距离沿线巡检、精细化巡检、可视化走廊等任务,对输电线路断股、鸟窝异物、温度异常、绝缘子串破损、树障等检测,有效缓解了电网巡视效率低、巡视质量不统一、无法定量判断设备状态、覆盖细节不够等问题[4]。
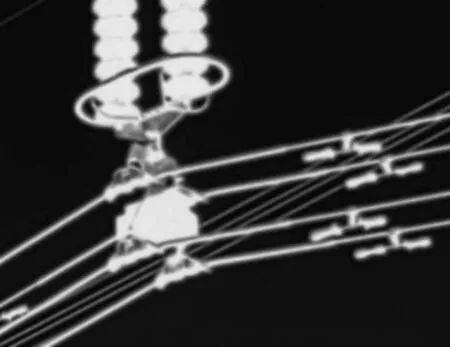
图2 无人机采集的架空线路红外信息
2 无人机巡检技术发展现状及展望
随着巡线无人机的逐步推广应用,一些问题也逐渐暴露出来:目前无人机普遍采用单人、单控、单机手动巡检方式[5],受限于此种方式及无人机平台约束,在作业时存在巡检安全、巡检效率、通讯距离等问题,制约了无人机巡线进一步发展。
2.1 无人机巡检避障技术
面对部署在复杂环境下的架空线路塔架,巡线人员通常远距离操控无人机接近架空线路进行巡检,无人机处于视线范围之外,仅能通过无人机搭载的光学镜头进行有限的周围环境观测与控制,而目前巡检要求无人机低速近距离观察杆塔、线缆等,以发现缺陷和隐患,因人工操作的介入,该作业具有较高风险[6]。以杆塔为例,无人机为近距离检测分布于杆体两侧的绝缘子串、电缆接头等元件,必须在检测完一侧后从线缆下方飞过塔体到另一侧继续检测。由于操作人员视线易受天气、时辰影响,无人机可能在飞过塔体时误触高压线缆而引发安全事故,甚至给电网带来不可挽回的灾难性后果。
为尽量减小无人机与架空线路的间距,提高巡检作业质量,部分巡检无人机配备了避障系统,当避障系统检测到无人机与目标距离小于安全距离时,发出避障或停止指令,以实现避障目的,从而保障无人机巡检工作顺利进行,提高作业的安全性,防止碰撞事故发生[7](如图3)。
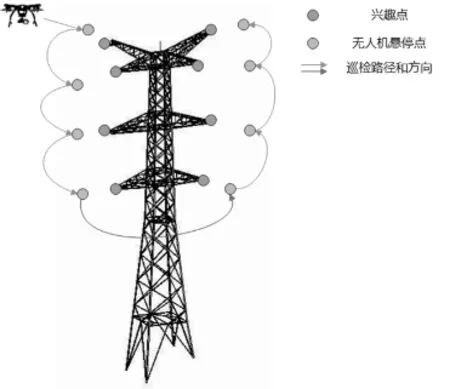
图3 无人机巡检路径规划
为了获得更好的进行障碍检测,张午阳等提出的一种基于深度学习的无人机单目视觉避障方法,该方法可以通过无人机搭载的光学镜头进行避障,无需额外传感器,减小了避障系统的体积及成本[8];朱平等提出了一种基于双目视觉与光流结合的无人机避障方法,实现了获取无人机与障碍物距离信息与相对运动信息,安全性得到了进一步提高[9]。同时,孟光磊等人仿真实现了基于超声波的无人机避障技术[10];而N.Gageik 等人基于红外测距传感器和超声波传感器,通过光流和惯性测量单元对红外和超声波数据进行滤波以此实现无人机的避障[11]。大疆最新推出的经纬M30 系列行业无人机就搭载6 向双目视距功能,实现10 m 内障碍物感知范围,实现了全方位避障。但是上述传感器避障仍存在一定的问题,视觉传感器感知范围有限,同时面对各种光照条件下的输电线,容易出现漏检、误检现象;红外、超声波测距传感器作用距离短;而检测效果好的毫米波雷达存在成本高、重量大等问题[12]。
根据架空线路特点,有研究人员提出利用线路产生的电磁场进行无人机避障(如图4),陈绍祥等人设计了一种高压输电线路电场三维检测装置,实现了对线路周围的电场检测[13]。黄俊璞等人利用输电线路周围电场强度的二次倒数作为判据进行避障,提高了无人机对架空线路避障的准确率[14]。
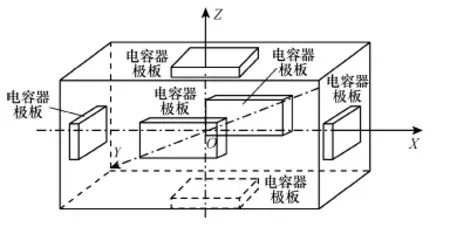
图4 电场检测单元结构
总体而言,基于输电线路电磁场的无人机巡检避障技术对无人机计算性能要求小、成本低、灵敏度高、非常适合荷载小、巡航时间有限的线路巡检无人机,具有较高的研究价值和工程实现价值。
2.2 无人机巡检通信技术
在巡线无人机作业时,需要地面站与无人机双向通信,将控制指令、无人机状态、巡检数据互相传输,无人机与地面站的通信距离将直接决定无人机单次架空线路巡检的距离与巡检效率[15]。目前巡检无人机通常配置对应的数传与图传系统,大疆推出的DJI O3 图传行业版为例,其支持2.4G、5.8G 通信频段,并可以接入4G 移动网络,实现6~8 km 无干扰、无遮盖的通讯距离,但是面对架空线路常见的山地、树林环境,以及架空线路附近的复杂电磁干扰,将造成有效通信距离快速下降,严重阻碍巡线效率。也有学者针对电磁干扰开展了通信研究,Slimenu F.等人提出了基于协作Q学习进行信道选择,提高了数据传输安全容量[16];张慧婷等人提出了基于深度强化学习的无人机通信抗干扰算法,通过智能决策进行最佳传输,实现时频域联合抗干扰[17]。
常见的无人机数传、图传技术虽然应用广泛,但是其地面端面临的地表障碍天然限制了无线电信号的传播,因此还需要其他手段进行远距离通信,目前常见的远距离无人机通讯技术包括有卫星通讯、以及中继通信等[18]。
卫星通信是通过地球静止轨道卫星以及中低高通量卫星星座、卫星互联网等新型空间信息基础设置,实现机载端与地面端通信,具有全天候、全时段的优点,但是通信设备成本高、体积大、通信延迟大,仅适合大型无人机搭载[19]。高通量卫星通讯技术不断发展,以美国SpaceX的星链计划为典型代表,以及我国发射的“中星16 号”、“亚太6D”等静止轨道卫星等,高通量卫星通信系统正在逐步建立,同时科研人员也对移动终端接收天线小型化、便携化技术开展研究,西安电子科技大学设计了一款便携式多频圆极化卫星通讯天线,在携带状态时天线直径仅为20 mm[20];毛勇等人也设计了一款潜用双频卫星通信天线,整体尺寸控制在了Φ140×430 mm[21]。随着卫星通信技术进步,日后有望在巡检无人机上实现超远距离、高宽带、低延迟的卫星通信。
中继通信是通过增设一个通信中继无人机,负责搭载通信中继设备,可以有效地提高巡检无人机作业距离,由于无人机通信中继可以应用于各类场合,受到了研究人员的关注(如图5)。S.Hosseinalipour 考虑到存在干扰的场景下,实现了部署无人机的最优位置以最大化系统的信号干扰比[22];R.Fan 等人联合优化无人机的放置和发射功率,以最大限度地提高系统吞吐量[23];方晶针对通信中继无人机的部署开展了轨迹优化与资源分配技术研究,并结合无人机轨迹和能耗提出了一种基于能效的联合轨迹与功率优化算法,有效提升了无人机中继辅助通信系统的能效[24];总体而言,中继无人机可以有效解决巡检无人机与地面端通信距离不足的问题,但是其需要额外配置一架无人机,对成本、携带等方面提出挑战。
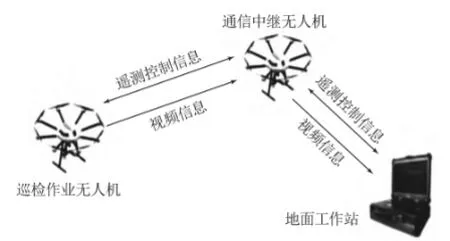
图5 无人机通信中继系统示意图
2.3 巡检图像采集识别技术
目前巡检无人机可以实现对架空线路的塔杆、金具、绝缘子、基础、附属设施、通道等进行检测,但是主要方式仍然依赖于人工操控无人机,巡检质量依赖于飞手经验,存在拍摄照片型式标准不同、照片质量参差等问题,亟需开展智能化巡检技术,提高巡检质量[25]。
大疆推出的行业无人机针对架空线路巡检提供了标准化的解决方案,从模型建立、到精细化巡检,降低了巡检人员手动操作的要求,提升了数据标准化。但是其需要事先进行数据采集,目标点拍摄角度、巡检路径固定,覆盖细节不足,无法判断设备状态等问题。广东电网在大疆无人机的基础上,结合架空线路巡检特点进行功能和软件系统的优化,实现了更规范、高质量的自动巡检。
此外,目前无人机架空线路巡检仍仅局限于信息采集,再离线进行人工缺陷检测,由于拍摄图像数量巨大、周边环境复杂多变,人工判别线路故障依赖经验,工作量大,误检率高,难以满足架空线路巡检快速准确性要求[26]。与此同时,随着人工智能,深度学习技术的发展,图像识别算法得到广泛应用,因此,架空线路故障智能检测技术研究也取得了一定进展。
李帷韬等提出了一种基于强化学习的线路缺陷检测方法,并针对检测结果可信性指标,构建不同的Transformer 网络编码层自适应调整机制,体高功率检测精度[27];陈嘉琛等提出了一种基于YOLO v3 的输电线路缺陷识别方法,通过轻型化与剪枝技术,降低了对服务器硬件要求[28];王道累等人针对玻璃绝缘子自爆开展了针对性缺陷检测研究,通过改进的生成对抗网络进行无监督学习[29],为电力设备缺陷无监督检测提供了参考。
虽然目前架空线路缺陷检测技术有了长足的进步,但是仍普遍存在计算量要求高、计算时间长、泛化性差等问题。因此面对架空线路的设备场景多、故障类型复杂等特点,小样本、高泛化性缺陷检测技术,以及低计算量、硬件化边缘部署技术有着广阔的研究前景。
2.4 集群协同技术
相比单架无人机,多无人机集群协同作业可以获得更广阔的观察视野,在单架无人机的性能约束下最大限度提升续航能力和任务能力,在农药喷洒、土地测量、环境监控、气象观测、资源探查等多方面具有良好的应用性。受到学者的关注,成为研究热点。
浙江大学高飞提出的应用于复杂野外环境的微型无人机自主集群算法及系统被国际权威综合性期刊《Science》于网站首页专题报道[30]。此外,国内外学者针对无人机集群的队形构建、集群控制、协同导航、任务分配、路径规划、自组网通信、避障等领域均开展了相应研究,取得了良好的进展。
尽管集群协同技术具备诸多优点,但目前针对架空线路的无人机集群系统巡检技术研究尚少,因此针对架空线路的大范围、高复杂电磁环境等特点,开展单线路、多线路、通道及电气设备的无人机集群协同巡检技术研究,对提高架空线路巡检效率、安全性、解决巡检任务重与巡检人员短缺的突出矛盾,有着重要的应用价值和研究意义。
3 结束语
无人机架空线路巡检相比于人工巡检从安全、效率、质量等方面都有了质的提高,利用无人机进行巡检已经成为电力巡检智能化的必然选择,但是随着无人机巡检逐步应用,现有的一些问题也逐渐暴露出来:面对架空线路环境复杂、电磁干扰严重、巡检种类多、任务量大、范围广等问题,本文根据目前架空线路巡检无人机技术现状,具体分析了无人机架空线路巡检在避障、通讯、图像采集、集群协同等关键技术以及发展趋势,为架空线路无人机巡检发展提供一定思路。
猜你喜欢
智慧电力(2022年1期)2022-03-02
科技研究·理论版(2021年4期)2021-09-10
河南电力(2020年5期)2020-05-22
无线电通信技术(2019年1期)2019-12-24
太原科技大学学报(2019年6期)2019-11-18
军事运筹与系统工程(2019年4期)2019-09-11
电子制作(2018年11期)2018-08-04
无人机(2018年1期)2018-07-05
中国交通信息化(2017年3期)2017-06-08
知识就是力量(2017年2期)2017-01-21
