
三维激光扫描技术在异形建筑竣工测量中的应用
2022-02-03 08:12聂飞肖琦
资源导刊(信息化测绘) 2022年11期
聂飞 肖琦
(1.江西省地质局地理信息工程大队,江西 南昌 330001;2.江西省地质局第四地质大队,江西 萍乡 337055)
1 引言
竣工测量是指在建筑物新建、扩建、改建过程后,对建筑的相关位置、实际面积等进行的测量工作[1]。近年来,随着城市化进程的加快,以及施工工艺的快速发展,越来越多的异形建筑出现,异形建筑在给人们带来视觉享受的同时,也给竣工测量工作带来了挑战[2]。传统竣工测量作业方式主要包括全站仪数字测图、GPS-RTK 测量、手持测距仪和钢尺直接测量法等,这几种作业方式都是通过获取有限的特征点数据来绘制建筑平面、立面和剖面图等竣工测量成果,虽然简单有效,但仅适用于形状较简单的建筑物。异形建筑由于形状不规则,仅靠有限的特征点数据来绘制相关图件非常困难,因此寻找一种高效快捷的竣工测量方法是当前急需解决的问题。三维激光扫描技术是继GPS 之后兴起的又一次技术革命和创新,其采用非接触的测量方式可全自动、高精度地获取物体表面的密集点云数据,后期结合相关软件可高效快捷地获取异形建筑的竣工测量成果,将其应用于异形建筑竣工测量具有非常大的优势。
2 三维激光扫描技术原理
三维激光扫描技术是于上世纪90 年代中期发展并逐渐成熟起来的一项高新技术,其原理和全站仪测距测角类似,不同点在于传统方式是通过单点逐一测量物体的坐标,而三维激光扫描技术无需接触测量目标,通过发射连续激光束就可快速获取物体表面的密集点云数据,参照配套相机采集的纹理和色彩信息,再利用相关软件就可以大面积、高分辨率地复建出被测物体的三维空间模型,从而实现了从点测量到面测量的跨越,因此它又被称作为“实景复制技术”[3]。三维激光扫描仪采集到的点云数据是以扫描坐标系为基准的,扫描坐标系的定义为:以发射激光束处为该坐标系原点,X轴为扫描仪水平转动轴的零方向,Z轴为扫描仪水平时的天顶方向(理论竖直轴),Y轴与X轴、Z轴成右手坐标关系[4],三维激光扫描技术测量原理如图1所示。
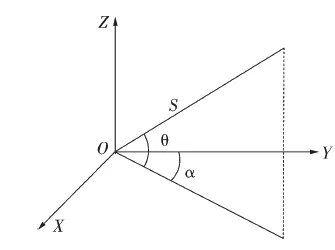
图1 三维激光扫描技术测量原理
3 实例分析
3.1 项目概况
某项目包括容纳两栋办公的塔楼、配套商业裙房、地下车库及城市绿地等功能,总建筑面积约8.6 万m2。该建筑物外形设计新颖前卫,属于典型的不规则多边形异形建筑,楼层错落有致、倾斜交错、楼体凹凸多变、层层堆叠(如图2 所示)。整个建筑外墙多为铝合金玻璃幕墙体系,利用全站仪设站测量很难准确测量各层建筑轮廓特征点,这给利用传统测量方法开展竣工测量带来了挑战。
鉴于该项目的建筑特色,采用三维激光扫描技术进行竣工测量能够快速有效地获取建筑轮廓点云数据,再利用专业软件Cyclone 对点云数据进行处理,编绘出竣工图件并计算建筑面积。Cyclone 是徕卡公司推出的点云数据处理软件,包括点云数据拼接、数据管理、协同作业数据后处理、数据发布、数据浏览等功能,是三维激光扫描产品的最佳伴侣。

图2 某异形建筑外观
3.2 数据采集
(1)控制测量
选用项目周边已有的为满足施工控制测量布设的2 个二级导线点作为起始点,二级导线点的高程按照四等水准要求进行联测。扫描线路布设成闭合导线,导线点位分布设在建筑物的周边,考虑到两栋高层建筑的顶部构造比较复杂,因此在建筑物的4 个拐角处选择合适的角度设站,扫描控制网的布设如图3 所示。布设好控制点后,利用CORS 网络RTK 联测已知二级导线点,经检测平面及高程精度均满足《城市测量规范》的要求后方可进行观测,每个控制点均观测两次,取两次观测值的平均值作为终值,最终得到每个控制点在CGCS2000 坐标系下的平面坐标和高程,便于后期将扫描点云数据统一转换到该大地坐标系下。
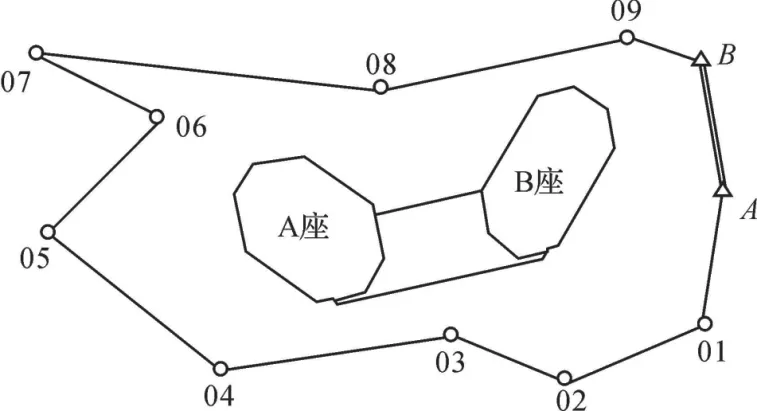
图3 扫描控制网布设
(2)点云数据采集
点云数据的获取采用华测Z+F IMAGER 5010C 地面高精度激光扫描仪,该扫描仪具有易携轻量化、外业操作简单、快速等优点,它使用极其纤细的近红外线激光束,采用非接触式快速获取数据的脉冲式扫描机制原理,每秒发射最高可达110 万点的纤细激光束,能获取相对精度高、覆盖范围广的点云数据,单站即能获取一幢楼一个立面的点云数据。点云数据采集的具体步骤为:架设三维激光扫描仪、整平并设置适宜的高度、设置好扫描参数、将后视标靶架设在已知点、直接对待测立面进行扫描并获取点云和影像数据。
3.3 点云数据处理
将采集到的点云数据导入Cyclone 软件,点云数据处理主要有点云拼接、点云去噪、点云统一、点云输出四个步骤。
(1)点云拼接
为保证建筑物表面点云配准的精度,采用序列拼接的方法,从第一站开始,将前两站点云数据导入Cyclone,先利用两站点云间4 个球形标靶进行初配准,再利用重叠点云进行ICP 配准。按照这种策略将9 站点云拼接完成后,首尾重叠处的点云相差在6mm 以内,满足建模精度的要求。
(2)点云去噪
利用Cyclone 软件手动去除点云中含有粗差的数据和无效的形体数据,这一过程属于去噪处理,在Cyclone 软件中打开拼接完成后的9 站点云总图,通过旋转、放大操作将点云调整到理想位置,根据需要在工具栏中选择合适的工具去除噪声点。
(3)点云统一
去噪后的点云数据在相邻两站点云重叠区域存在数据冗余,造成数据量增大、采样间隔不一致的状况,因此需要对点云数据进行重采样,具体过程就是在保证点云数据质量的前提下,利用Cyclone 软件压缩点云的数据量,再对点云数据进行统一化处理,将多站点云合并成一个整体。
(4)点云输出
将Cyclone 软件预处理完成后的点云数据导出为特定格式,以便在点云成图软件中进行深加工,处理后的点云成果数据如图4 所示。

图4 处理后的点云成果数据
3.4 建筑平面图绘制和面积计算
由于建筑物某些层的面积形状是相同的,只提取有代表性的建筑层计算面积,下面以其中某层为例,说明横切面提取及面积计算的方法。
(1)提取层模型。在Cyclone 软件中用Rectangle Fence Mode 命令选取该层建筑物的点云数据,通过Copy Fenced to New ModelSpace 复制模型到新的模型空间,选取菜单栏中的Top View,从选取层的顶视图可看到此层的粗略轮廓线。
(2)将特征层导入CAD。预先安装Cloud-Worx 插件,CAD 软件的菜单栏会自动出现Cloud-Worx 选项,利用Cloud-Worx 插件将Cyclone 软件中的数据模型导入CAD,在CAD 菜单的三维视图中选择俯视,就可出现层模型的轮廓线。
(3)建筑平立面图绘制。由于目标建筑物很高且楼层越往上拐角越多,从地面使用仰角扫描楼层的中部和顶部时,会出现一些拐角被遮挡而缺少点云数据的现象。为提高建筑物面积的提取精度,研究采用构造线的方法来弥补层模型不规则的地方,如直角处与对称处,导入CAD 的建筑物轮廊线有缺少数据的部分,根据对称性原则,可通过构造线方法,较好地还原建筑层的形状和特征。用构造线对粗略轮廓线的所有边都进行勾画,可得到层模型比较精细的轮廓线,再用多线段对轮廓线进行绘制,可得到最终的建筑物精细平面图。结合数码相机获取的高分辨率影像,利用CAD 进行建筑立面线划图的提取与绘制(如图5 所示)。
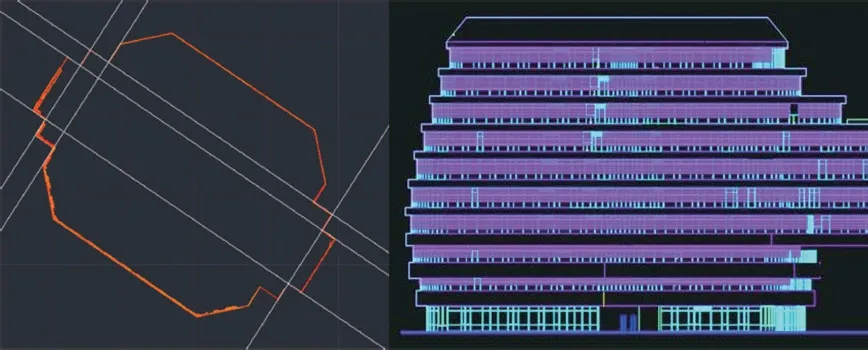
图5 建筑平立面图
3.5 精度验证

表1 全站仪实测坐标与三维激光扫描测量坐标对比
为了验证本次竣工测量成果的质量,在建筑物上选取12 个特征点,分别用免棱镜全站仪测量出所有特征点的坐标,将其结果与三维激光点云中量取的坐标值进行比较[5],统计结果如表1 所示。从表1 统计数据可以看出,12 个特征点的平面位置误差为0.012m,高程误差为0.011m,满足CJJ/T 8-2011《城市测量规范》关于城市建筑竣工测绘的相关精度要求。
3.6 效率分析
任务完成后,项目组将传统竣工测量方法与利用三维激光扫描技术的生产效率进行了比较:在外业效率方面,利用GPS-RTK 和全站仪数字测图的方法需要两个人,用时3 天;而三维激光扫描技术不到1 天即可完成外业数据采集工作。在内业效率方面,传统方法需要对数据进行展点,再跟草图进行对比,最后绘制出成果图;而三维激光扫描技术可以在导出数据后直接在点云上描绘,再经过简单处理就可直接出成果图,经比较,内业出图效率比传统作图高出3 倍以上。总体来看,三维激光扫描技术和传统测绘方法相比,生产效率至少提高了3 倍以上,应用效果显著。
4 结束语
三维激光扫描技术具有扫描速度快、数据信息量大、精度高等优点,将其应用于复杂、不规则的异形建筑中能够显著提高竣工测量的工作效率,同时,还可提高规划核实工作的准确性、科学性和高效性。但是,该技术在实际应用中依然存在一些问题,比如难以获取到异形建筑物顶部的数据,而且遇到扫描对象为玻璃幕墙等反射率较低的建筑材料时,点云数据的质量不是十分理想,相信随着仪器的不断升级以及相关软件功能的不断完善,以上问题都会得到妥善解决,该技术必将具有广阔的应用前景。
猜你喜欢
现代仪器与医疗(2022年2期)2022-08-11
矿产勘查(2020年1期)2020-12-28
水电站设计(2020年4期)2020-07-16
模具制造(2019年3期)2019-06-06
铁道标准设计(2018年12期)2018-11-22
汽车与安全(2017年7期)2017-08-03
汽车与安全(2017年6期)2017-07-25
汽车与安全(2017年5期)2017-07-20
汽车与安全(2017年3期)2017-04-26
现代营销·经营版(2015年3期)2015-04-20
