基于模糊隶属度的多站点多机协同即时响应调度系统
2022-01-27 02:45陈燕燕刘亚东张镇府
农业工程学报 2021年21期
黄 凰,陈燕燕,朱 明,刘亚东,张镇府
基于模糊隶属度的多站点多机协同即时响应调度系统
黄 凰1,2,陈燕燕1,2,朱 明1,2,刘亚东1,张镇府1
(1. 华中农业大学工学院,武汉 430070; 2. 农业农村部长江中下游农业装备重点实验室,武汉 430070)
为了实现多农机站联合调配完成农户的实时作业订单,该研究针对农田与农机的匹配与调度需求问题,综合考虑农户满意度、多农机站协同、订单数量、农田面积和位置坐标等因素,建立带有模糊时间窗并以调度总时长最小和调度农机数量最少为目标的多农机站即时响应调度数学模型。设计了基于保留优秀父代基因的改进遗传算法的农机调度系统,完成多农机站响应多农田的同时作业需求的任务,在最短时间里即时调配农机按照最短路径至各农田完成作业要求。以武汉周边某地区的3个农机站和35个农田作业订单为例,验证所提出的模型和智能优化算法,并进行可视化界面展示。试验表明,当模糊隶属度为0.8,比其为0.9时,调度总路程减少率为9.89%,农机数量降低率为15.38%;针对该地区各农机站农机数量的实际情况,在不影响农户满意度的前提下,单个农机站接受实时订单数量以不超过20为宜。该研究实现了多农机站对多农田精准调度作业,有助于科学合理调度农机,提高农机作业效率,节约成本投入。
农业机械;调度;模糊时间窗;遗传算法;即时响应
0 引 言
中国农业在现代化转型过程中,面临着农机供需信息滞后、资源配置不合理和农机作业效率低等问题,农机规模化作业已成为趋势,农机社会化服务形式需不断创新。在农机社会化服务中,包括了农机服务需求方和农机服务提供方,需求方发布自己的作业需求,其需求包括农田面积,作业类型和时间限制等,农机服务组织如农机站对已发布需求的众多农田分配合适的农机,并规划最短的行驶路线,从而实现即时调度的全局最优。
农机即时响应调度的本质是农机与农田的时空调度问题,该问题的目标是保证在规定时间内完成所有农田作业点任务且尽可能减少调配成本。随着农机组织作业范围的扩大,农机数量的增加以及与农田配置复杂度的增加,传统只关注农机行走路径的农机调度方式已不适应新形势的要求。针对此问题,智能优化算法则在寻求最优调度方式中发挥着至关重要的作用,如元启发式算中的遗传算法[1]、蚁群算法[2]、粒子群算法[3]、模拟退火算法[4]、禁忌搜索算法[5-6]等。
在实现农机合理调度方面,国内外学者对智能调度算法进行了广泛研究。国外学者Ma等[7]和Ribeiro等[8]研究了带时间窗约束和路段容量限制的车辆调度问题,提出以配送时间为目标函数的车辆调度问题。Guan[9-10]对农机调度提出两阶段方案,先分配农机资源,再利用模拟退火和遗传算法求得全局最优解。Alaiso等[11]建立的农机调度模型是旅行商问题的变体,其中对调度路径优化采用群组优化算法—蚁群算法。Seyyedhasani等[12-13]考虑了多辆农机协同作业的情况,使用改进的 Clarke-Wright 算法和禁忌搜索算法,将农机调度问题转换为车辆调度问题。Ma等[14]将遗传算法的交叉和突变操作者引入粒子群算法,构建了杂交粒子群算法,并采用了三级编码规则,实现了多个配送中心危险品风险均衡化的有力调度。Tuani等[15]基于旅行商问题,提出的3-opt局部搜索的异质自适应蚁群优化,在蚁群算法中引入自适应性,实现了在优化搜索过程中使参数接近最佳值,以便于找到近乎最佳的解决方案。
国内学者李洪等[16]为了解决农机作业过程中出现的缺乏有效的农机调度手段以及信息滞后和时效性差等问题,提出了基于GPS、GPRS和GIS的农机监控调度系统,为农机资源的实时监控和有效调度提供了一种切实可行的解决方案。张璠等[17-18]提出了一种基于机主选择的农机调配模式,设计了基于启发式优先级规则的农机调配算法。吴才聪等[19]以动态规划的思想逐步分解决策过程,建立农机时空调度模型,给出农机调度的全局解算方法。王雪阳等[20]提出了基于遗传算法的农机调度ASBOGA,考虑了农机在不充足的条件下,产生农机二次分配的情况,使农机在规定期限内完成调配任务且使调配成本最小。马军岩等[21]设计改进模拟退火和粒子群优化的混合智能算法求解调度模型,建立多区互联的农机调度模型和智能优化调度算法,旨在从全局角度优化农机资源配置,实现资源合理利用。潘帅等[22]研究了多种服务需求的车辆调度问题,以禁忌搜索算法为基础,改良解的构造方法与邻域变换规则,证明了采用改进禁忌搜索算法处理此调度问题的有效性。另外,为实现农机的调度模式更符合实际田间作业情况,凌海峰等[23-25]在模型中加入时间窗限制,Sundaranarayana等[26-27]和张帆等[28-29]对遗传算法进行改进优化,叶文超等[30-32]搭建农机调度管理与管理平台,对农机进行调度和实时监控。综上可见,国内外学者在农机资源调度技术中广泛应用了元启发式智能优化算法,对解决农机资源合理分配,提高农机调度精度和速度方面都有很大的突破和创新,但针对于跨区域多农机即时调度方面研究较少,且在农机调度领域无时间窗限制,或者考虑硬时间窗和软时间窗的较多,而利用模糊时间窗来提高农户满意度和降低调度成本的研究不多。
鉴于此,本文以运筹学中旅行商问题为基础,构建以实现调度总路程和参与调度农机数量最少为优化目的,且最大程度上提高农户满意度的农机调度模型,并利用改进的遗传算法完成农机调度路线最优解的解算,拟实现多站点多农机精准调度,解决多农田即时作业问题,提高农机作业效率。
1 农机调度模型
1.1 模糊时间窗的设计
在农机调度实际过程中,由于时间窗具有弹性,农户对农机作业时间的要求并不是刚性的,农户偏好于在发出作业请求的某一段时间进行作业,农机只要在一定时间内到达农田完成作业任务,对农作物的耕保收阶段都不会产生很大的影响,但若推迟到达可能会引起农户满意度的下降。因此针对于本文即时调度的情况,借鉴车辆调度中对时间窗的模糊化处理[33-34],设计农机调度的模糊时间窗,农机站不仅可以对农户的即时订单迅速制定出合理的农机调度策略,节省总体调度成本,而且可以更准确的反映农户的心理。
本文处理时间窗所使用的模糊隶属度函数表达式如式(1)所示,利用Qamsari[34]在车辆调度模型中对时间窗用线性函数来表示早于和晚于服务时间的服务水平,在此基础上设计适应农机即时响应调配任务的线性模糊隶属度函数,以此来反映晚于时间窗引起的农户满意度变化,其中模糊隶属度U反映农户满意度,U值越大,农户满意度越高。

式中U为模糊隶属度;l为农户期望的农机最晚到达时间;t为农机站M中编号为的农机到达农田的时间;L为农户期望的农机到达时间。
若农机在时间L之前到达,农户满意度为1;若到达时间超过农户期望时间窗L,但在可容忍的最晚时间即l之前,农户满意度值在(0,1)范围内;若超过l,则农户满意度为0。
1.2 模型假设
本文的带模糊时间窗农机调度模型主要针对以农机站为代表面向农户即时订单的服务形式,该模式的假设条件:
1)农机站的位置信息、各农田的位置和面积以及农机行驶速度均已知,农机的作业能力一定。
2)每辆农机能够给多个农田提供服务,一个农田只需要一台农机作业。
3)有多个农机站,假设各农机站中针对不同的农机作业需求只配有一种车型。
4)在一次调度过程中,被调配的农机从对应的农机站出发,经过调度路径上的农田作业点之后,返回其所属农机站。
5)农机站针对农户的即时订单,须在农户可接受的最迟模糊到达时间之前到达。
6)针对的是单环节作业问题,农田订单为相同的作业任务,如油菜机播,农机站即时响应农田订单,调配对应农机完成农田作业任务。
1.3 模型建立
在某区域范围内有个农机站,分别编号为1,2,3,……,M,各农机站农机数量一定,在时刻,该区域中的农户同时发出多个农田作业需求,该作业需求包括:农田编号分别为1,2……,,农田面积S,期望农机到达作业时间L,=1,2,……,。设农机单位时间内的工作效率为,农机完成有作业需求的农田所需时间为T,且T=S/;t表示农机站M中编号为的农机从农田到农田的时间;T表示农机站M中编号为的农机完成农田作业后的时间。
1.3.1 确立目标函数
由于在该模型中,农机的行驶速度一定,农田面积以及农机工作效率和作业成本一定,则在不计较损耗的情况下,农机对每块农田的作业成本和作业时间是固定的,因此同种或相近作业型号的农机具有相同的作业能力,可用被调配的所有农机在整个调度过程中的总行驶和作业时间来衡量调度时间成本,用参与调度的农机数量来衡量农机调度成本,在模糊隶属度U情况下,确立目标函数如下:

式中min(U)为在模糊隶属度U下整个调度过程总代价成本;表示农机总转移时间在目标函数中的权重;表示参与调度的农机数量在目标函数中的权重;L表示农机站M中编号为农机的调度总路程:X0j表示参与调度的农机数量;为农机站中农机数量;为农田数量。
1.3.2 确立约束条件
农田到是否有农机被调度前往作业,计算公式为

参与调度的农机不能超出农机站拥有的总数量,即
被调配的农机完成对应的农田作业任务之后返回到原所属农机站,即
每个农田需被访问且只能被访问一次,计算公式为

农机完成当前农田的作业任务时间与到达下一个农田所花费时间的总和应低于下一个农田所要求的最迟到达时间,计算公式为

农机完成当前农田作业任务的时间、农机从当前农田到达下一个农田时间和下一个农田作业任务完成所需时间之和是下一个农田完成作业任务的时间。计算公式为

式中,=1,2,…,;=1,2,…,;=1,2,…,;X为农机站M中编号为的农机从农田到农田是否参与作业;X0为完成作业任务后回到农机站的农机数量。
2 遗传算法改进
多站点多农机协同即时响应调度属于组合优化问题,而在解决该问题的众多元启发式算法中,基于适者生存思想的遗传算法应用较为广泛,该算法具有很强的搜索最优解能力,支持多方向的搜索和信息交换,可自适应地调整搜索方向,因此,本文基于传统遗传算法框架来求解构建的农机调度模型。为节约算法求解时间,兼顾农机调度距离最短和调配农机数量最少的优化目标,提高算法搜索全局最优解能力,本文采用改进后的遗传算法来寻求最优调度路径。
2.1 染色体编码
根据农机调度的特点,农机站和农田作业点是已知的,可采用自然数编码方式,能直观看到农机到农田的作业顺序。0代表农机站,1,2,……,代表农田,不同农机的配送路线之间用0分隔,例如有块农田有作业需求,辆农机,则染色体长度为1。
由以上的染色体编码原则随机生成一定数量的染色体,即构成初始种群,以便后续在此基础上进行遗传迭代。
2.2 适应度函数和选择算子
遗传算法就是学习生物遗传特性—“适者生存”,为了判断生成的染色体的优劣性,除了可行性判断之外,还需要设计适应度评估函数,用来计算个体适应度,适应度越好的个体遗传到下代的概率越大。在适应度函数设计上,考虑了调度距离和农机数量目标最小,以及农户能容忍的最晚到达时间,相较于基于调度距离单目标建立的适应度函数,采用综合目标函数倒数作为适应度函数来判断染色体的优劣。采用以下公式计算种群个体的适应度:
式中为目标函数值;为各可行解的调配农机数量;为到达农户的延迟时间;为惩罚权重。
选择算子采用锦标赛选择法,采用精英保留策略[35],从种群中随机选择个个体,对这个个体比较适应度值,具有最高适应度的个体胜出,并参与到后续的交叉变异操作中。
2.3 交叉算子
本文采用的染色体编码方式为自然数编码,而对自然数编码进行交叉的方式有顺序交叉和循环交叉等,这些方法被广泛运用在类似旅行商问题的单路径问题上,但不适用于农机复杂的调度条件和多条子路径的优化问题。因此,本文采用改进的交叉算子,以便最大可能保留优秀子路径。
步骤一:改进的交叉算子分别在两个父代染色体1和2上随机选择一段子染色体和作为子路径,并将被选择的子染色体分别前置;
步骤二:将父代染色体2中子染色体没有的编码,按照其在父代染色体2中的顺序添加到父代染色体的子染色体的后面,并在染色体的末尾添加编码0,得到子代染色体1,同理可得到子染色体2;
步骤三:针对于步骤二中得到的子代染色体1,在子染色体后面的m个位置添加1个编码0,共有m种情况,分别计算其适应度,将适应度最大的个体作为子代染色体1,子代染色体2同样方式得到。
2.4 变异算子
相较于传统的单点变异、单点交换和路径合并等变异方法,选择2-opt算法对得到的子路径进行变异操作,2-opt算法属于局部搜索算法,而局部搜索算法是解决本文组合最优问题的有效工具,其核心在于随机选择一个区间段的染色体进行优化,这个优化只是对于当前一个状态的优化,并不是对全局的优化,可加快算法的收敛速度。
步骤一:随机选择一个可行解染色体,并假设这个可行解是最优解;
步骤二:运用2-opt算法,在这个染色体上随机选择两点i和k,保持i之前的染色体不变并添加到新染色体中,将i和k之间的染色体翻转其编号添加到新染色体中,保持k之后的染色体不变并添加到新染色体中。
步骤三:对于步骤二得到的新染色体,计算其适应度值,并与原染色体的适应度比较,选取适应度最好的染色体作为当前最优路径,再重复上述过程直到迭代结束,找到最优路径。
3 实例分析
3.1 农机调度结果可视化展示
在湖北省沙洋县油菜轮作试点建有3个农机站,各农机站的某种型号农机数量均为7,农机行驶速度为 30 km/h,农机日工作量为5.33 hm2。在同一时间段,各农机站附近均匀分布35个农田订单作业需求,由于农户对农机作业需求的同时性,可优先按照距离划分农机站和对应服务的农田,各农机站对分配到的农田订单进行单独调度作业,并将农田分别编码,编码后农机站和对应农田基本信息见表1。
根据表1中的农田和农机站的基本信息,划定一定区域表示某一地区的农田总数。可得到如图1所示的农机农田位置示意图。
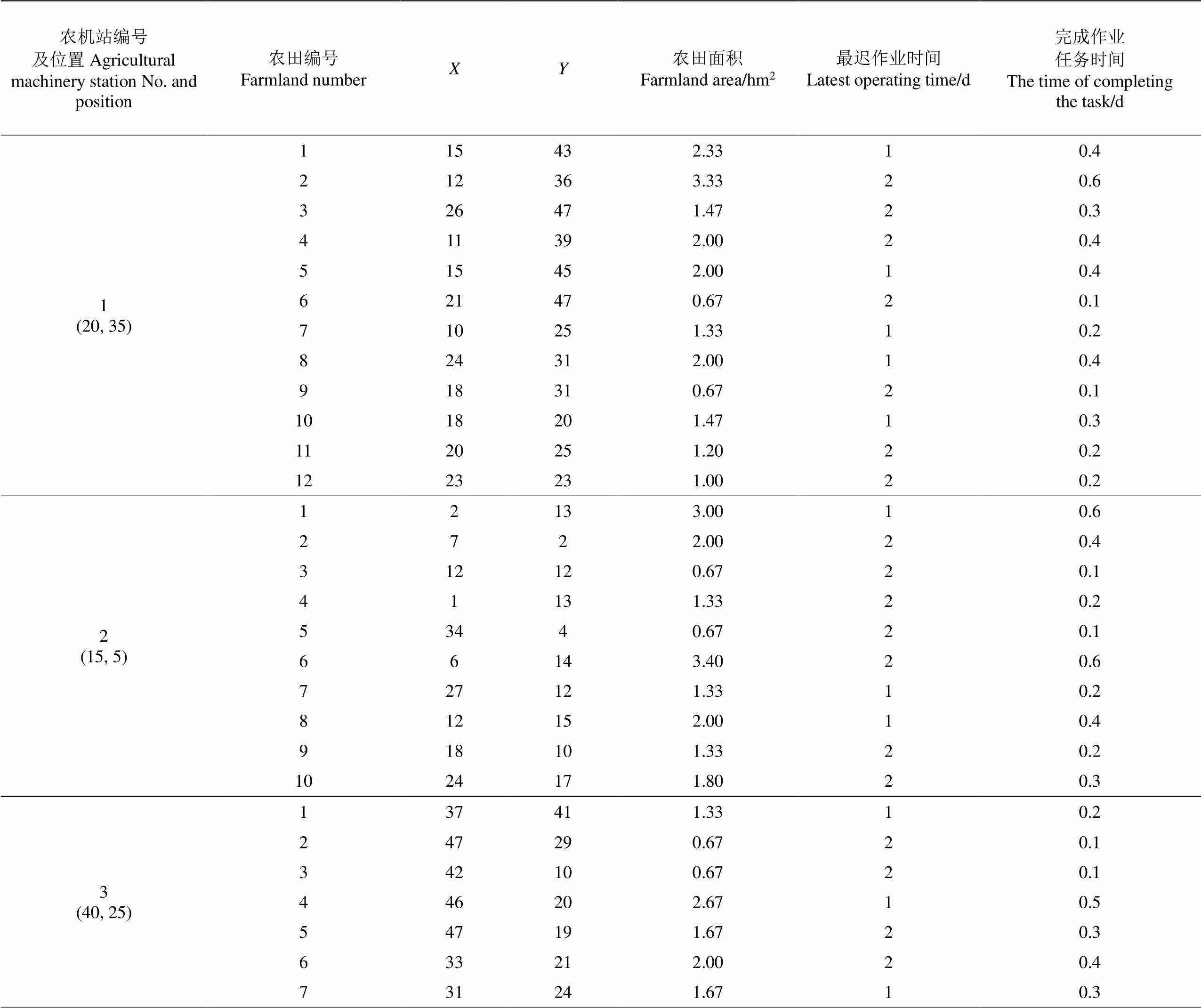
表1 农机站对应服务农田的基本信息

农机站编号及位置Agricultural machinery station No. and position农田编号Farmland numberXY农田面积Farmland area/hm2最迟作业时间Latest operating time/d完成作业任务时间The time of completing the task/d 3(40, 25)845162.0020.4 940381.3320.2 1035302.0020.4 1142152.6720.5 1233101.3310.2 1327201.6010.3
注:和表示农田的坐标和坐标,km。农机站位置和农田坐标的参考坐标系以112.304932°E和30.745032°N为坐标原点,以正东、正北方向为轴、轴。最迟作业时间是指发出农田作业订单后,农户期望的农机最迟作业时间,1、2分别表示发出订单第一、二日农机能完成作业;完成作业任务时间是指农机完成农田订单的作业时间,计算公式:完成作业任务时间=农田面积/农机日工作量。
Note:andrepresent theandcoordinates of the farmland, and the units of X coordinate and Y coordinate units are km. Reference coordinate system for the position of agricultural machinery station and farmland coordinates took east longitude 112.304932 and north latitude 30.745032 as the coordinate origin and took the east and north directions as theaxis andaxis. The latest operation time in the table refers to the latest operation time of agricultural machinery expected by farmers after issuing farmland operation orders. 1, 2 means that agricultural machinery can complete the operation on the first and second days of issuing orders, and 2 means that agricultural machinery can complete the operation on the second day of issuing orders. Completion task time refers to the operation time of agricultural machinery to complete farmland orders. The calculation formula is: completion task time = farmland area / daily workload of agricultural machinery.
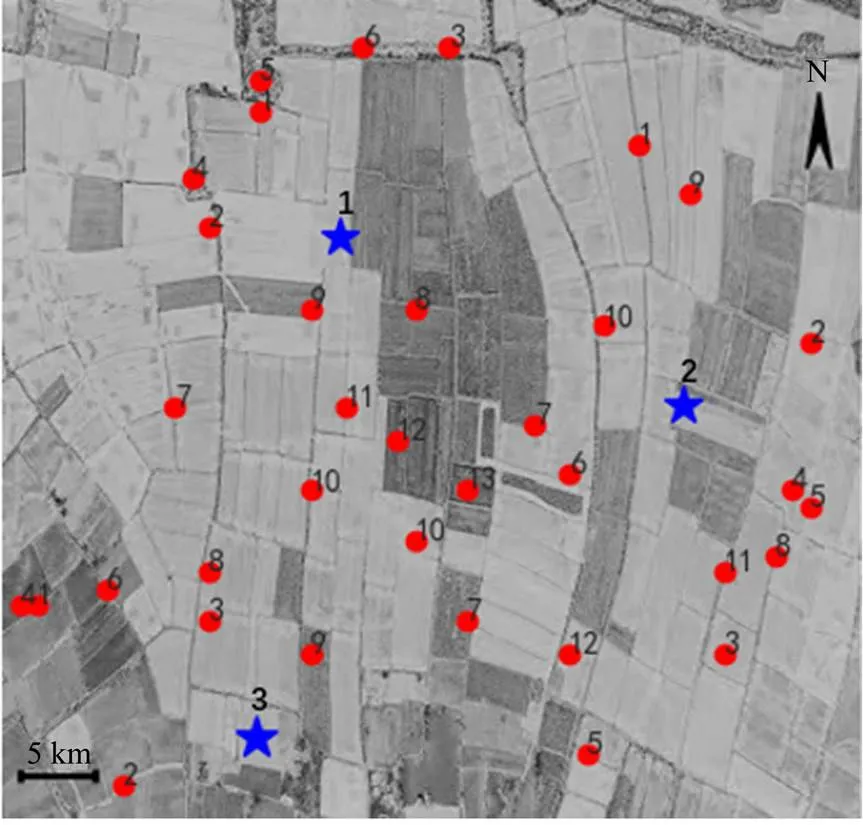
注:五角星图案和圆点图案分别代表农机站和农田,其上的数字表示其编号。
针对本文的农机调度问题,由提出的改进的遗传算法进行优化规划,经过对种群规模、交叉和变异概率的多次调试,种群初始规模为100时已能满足文中农机站对农机订单的调配任务,且调度距离趋于稳定的迭代次数在50~200之间,交叉和变异算子分别为0.8和0.1时的调度距离较短。故将参数设置如下:种群初始规模为100,最大迭代次数为200次,交叉概率为0.8,变异概率为0.1。当模糊隶属度U=1,权重=0.5,=0.5时,得到如图2所示农机调度可视化路线示意图,从线条和箭头指示方向可看出,调配的农机对应的农田作业订单和作业顺序,例如针对农机站1,一台农机的调度路线为0-9-7-10-12-11-0。
根据本文提出的带模糊时间窗的农机调度模型以及遗传算法,可得如表2所示的农机调度路线结果。每个农机站参与调度的农机数相差不大,分别为4和5,不超过农机站拥有的最大农机数量;每个农机在农田订单作业时间窗内完成作业,且农机站最长调度时间都未超过最迟接受作业时间的2 d。
3.2 试验任务分配结果分析
针对本文农户同时发出的35个农田作业订单,改变模糊隶属度U的大小,U在区间[0.5-1.0]范围内逐次降低,使其在不同农户满意度情况下,以不同的权重进行农机调配试验,试验结果如表3所示。
由表3试验结果可看出,调度总路程和调配农机数量权重相同情况下,降低模糊隶属度,调度总代价成本逐渐减小。考虑到实际农机作业和调度分配情况,农户发出即时作业订单,需要农机站快速响应,而农机站对于作业任务订单,会优先考虑总调度路程代价成本,因而当取值较大,取值较小时,可以得到路程代价成本和农机数量代价成本较均衡的农机分配结果。为了观察U(农户满意度)和农户订单数量对农机调度的影响,本文在其他影响因素不变的情况下,提取这两项影响因素分别分析农机任务分配结果,分别以折线图和迭代次数图对代价成本变化进行直观展示。

注:箭头表示从农机站出发的农机完成分配到的农田作业任务,最终返回到农机站,数字表示农田的编号。实线、长划线-点、圆点、短划线和长划线箭头分别代表各农机站中农机编号为1、2、3、4和5的调度路径。
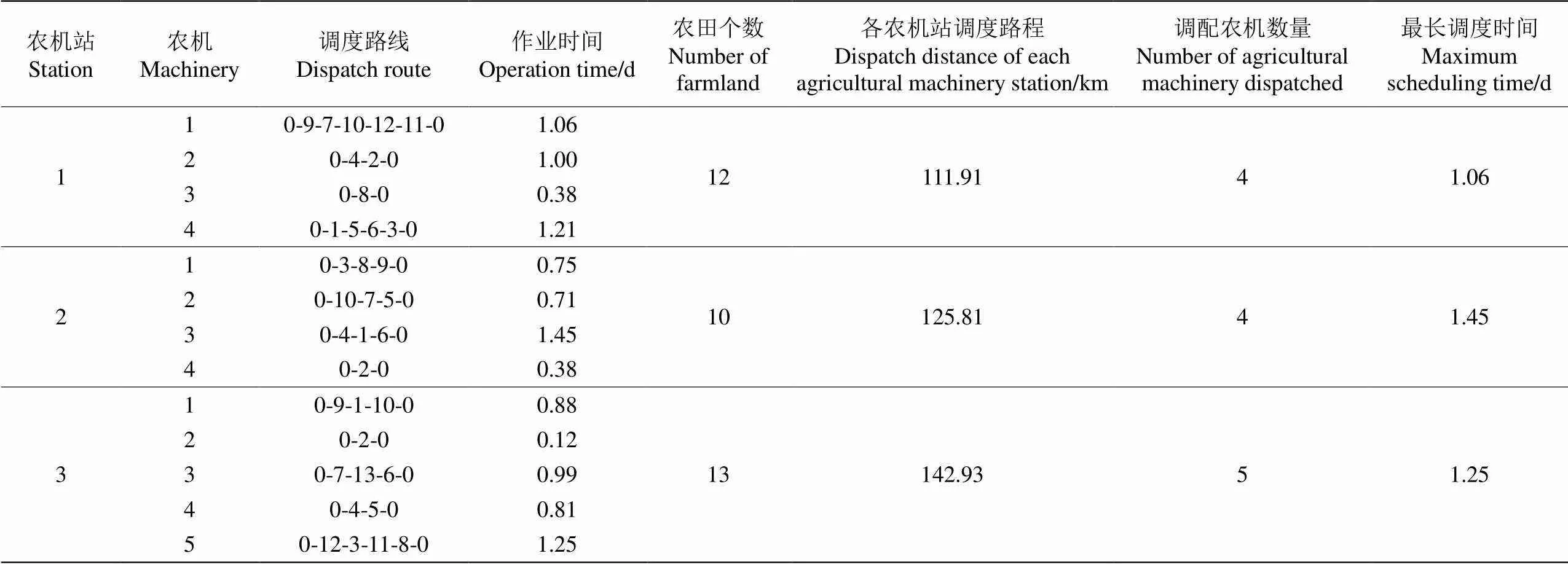
表2 3个农机站调配农机路线结果
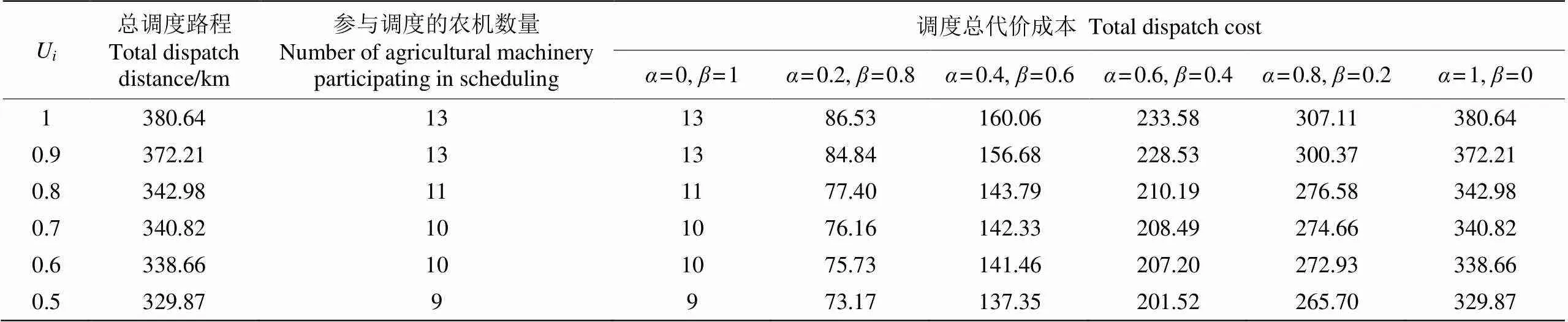
表3 不同模糊隶属度、权重下的3个农机站调配试验结果
注:表示农机总调度路程在目标函数中的权重;表示参与调度的农机数量在目标函数中的权重。
Note:represents the weight of the total dispatch distance of agricultural machinery in the objective function;represents the weight of the number of agricultural machinery participating in scheduling in the objective function.
(1)农户满意度对农机任务分配的影响
由于模糊隶属度U侧面反映的是农户满意度,下面将以农户满意度来代替模糊隶属度进行分析,农户满意度对农机任务分配的影响见图3。
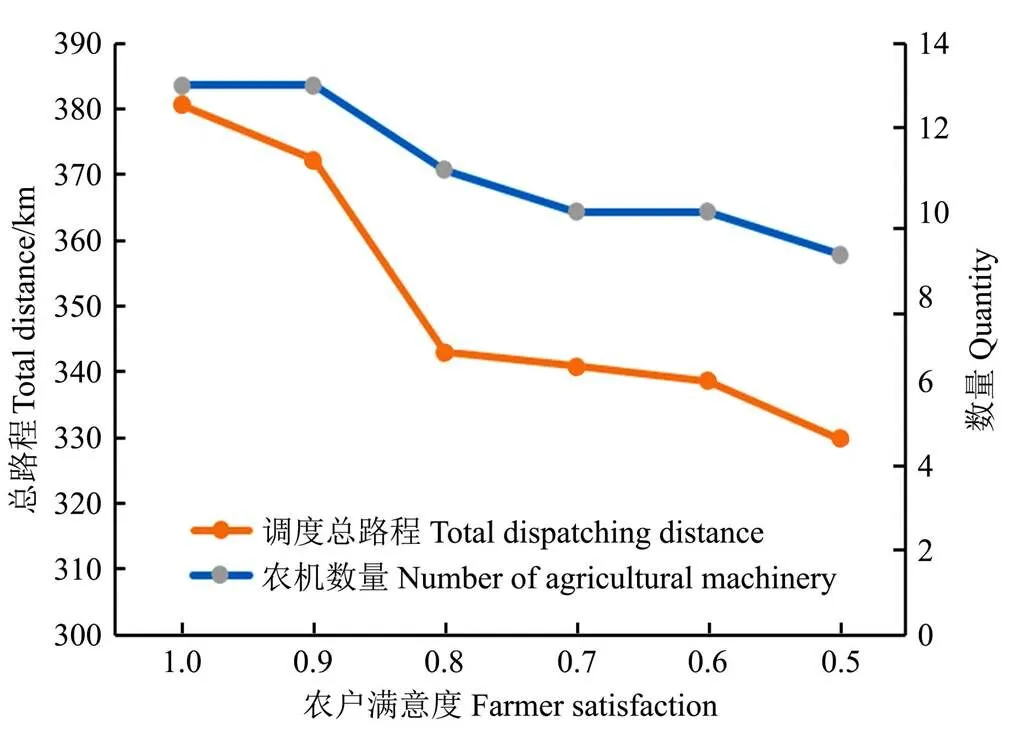
图3 调度总路程、农机数量与农户满意度的关系
当农户满意度从1.0到0.5逐渐降低时,对相邻满意度下的调度总路程和农机数量变化进行分析,可得出以下结论:当农户满意度在0.8时,用本文算法得出的农机调度总路程变化最快,比农户满意度为0.9时的调度总路程下降了近9.89%,下降趋势较为明显,大幅度节约了调度成本,当满意度低于0.8时,调度总路程变化较平缓,无明显变化;相邻农户满意度下的农机数量进行比较,当农户满意度为0.8时,参与调度的农机数量才开始减少,此时的农机数量与农户满意度为0.9下的农机数量相比,下降了15.38%,远远高于其他相邻满意度下的农机数量下降率,这也与实际生产情况相符合,农机在一定时间内到达农田作业即可满足农户订单要求。故可建议将农户满意度设置为0.8,以便于满足大部分农户,但若农户对作业时间要求较高,需将其设置为0.9~1.0;若农户对作业时间要求较低可将其设置为0.8以下。因此,具体的农户满意度参数设置需视农户实际需求情况而定,以满足不同要求的农户,并以此来提高农机站的服务水平。
(2)订单数量对农机任务分配的影响
为了更加直观看出订单数量对农机站调配农机的影响,以农机站1为例,在农户满意度为1的情况下,调度距离随算法迭代次数的变化如图4所示,当订单数量分别为12,17和20时,调度路程趋于稳定的最少算法迭代次数分别接近30次,100次和150次,订单数量越多,调度距离趋于稳定且最短所需的迭代次数越多。其中最少迭代次数、调度最短路程、农机数量和算法运算时间如表5所示。
从表4可看出,本试验当农机站1号的订单数量为17时,该农机站所有农机参与此次即时调度作业,且农户满意度为1,农户不需要多余等待时间。如果农机站1接受农户订单数量超过17(例如表4中订单数量为20时),若还需在农户指定时间里完成作业,参与调度农机数量将超过该农机站拥有的总数7辆,此时可参照上文所讲农户满意度对调度的影响,减小模糊隶属度,适当降低农户满意度,以此来达到作业要求。由此可见,本文所建模型和智能优化算法能满足多种情况下的农机调度作业。若在不影响农户满意度的提前下,依据本文模型和算法,单个农机站接受实时订单数量以不超过20为宜。

图4 订单数量分别为12、17、20时的调度路程随迭代次数变化曲线
3.3 算法对比分析
为进一步验证本文所提算法的性能,与目前运用较多的混合遗传算法进行比较,其中混合遗传算法采用贪婪策略为农田订单分配农机,并采用基于传统遗传算法的顺序交叉算子和粒子群算法进行解的空间搜索。表5为本文算法和混合遗传算法的对比结果,由表5可知,各农机站在两种算法下需要调配的农机数量一致,但调度路程和算法运行时间却有差异:对于农机站1,使用改进遗传算法进行农机调度作业时,调度路程和运算时间分别缩短14.14%和0.55%;对于农机站2,调度路程和运算时间分别缩短11.05%和7.66%;对于农机站3,调度路程和运算时间分别缩短4.90%和14.78%。
从对比结果可看出,本文采用的改进遗传算法总体上优于混合遗传算法,缩短了调配算法运算时间,农机调配任务分配结果更加合理,减少了调度路程。
4 结 论
1)本文在建模的基础上,增加了模糊时间窗,该方法更加贴合农机调度的实际情况,其中模糊隶属度则反映了农户满意度。从以上农户满意度对调度总路程和时间、农机数量的影响可看出,建议将农户满意度设置为0.8,相较于农户满意度为0.9时的农机调度路程,其调度路程减少率可达9.89%,可满足大部分农户对作业时间的需求,若农户对作业时间要求较高或者较低,可视情况设置为高于0.8或低于0.8。
2)基于改进的遗传算法,相比于传统的遗传算法,本文对于交叉和变异算子的改进,减少了运算结果陷入局部最优解的风险,三个农机站调配农机的算法运行时间分别缩短了0.55%、7.66%和14.78%,调度路程分别缩短了14.14%、11.05%和4.90%。
实例分析中选取的是湖北省沙洋县油菜轮作试点,若用文中提出的模型和算法来解决相似问题时,需修改对应的农机站和农田订单信息,且文中农田订单位置相对较分散,故以地块中心点来代表农田位置,未来进一步研究相对集中的农田田块时需考虑每个地块的农机进入作业点和离开作业点的位置,且本文考虑的是单环节作业问题,若考虑的是流水作业问题,多个作业环节同时进行,不同环节之间存在作业时间的交叉,需要对模型中的约束方程进行补充,增加其他环节对该环节作业影响的约束条件。
[1] Li X, Shi X, He J, et al. Coupling simulation and optimization to solve planning problems in a fast-developing area[J]. Annals of The Association of American Geographers, 2011, 101(5): 1032-1048.
[2] Chavez, Jhon J S, Escobar J W, et al. A multi-objective pareto ant colony algorithm for the multi-depot vehicle routing problem with backhauls[J]. International Journal of Industrial Engineering Computations, 2016, 7(1): 35-48.
[3] Xia L, Yeh G O. Integration of genetic algorithms and GIS for optimal location search[J]. International Journal of Geographical Information Science, 2005, 19(5): 581-601.
[4] Dupanloup I, Schneider S, Excoffier L. A simulated annealing approach to define the genetic structure of populations[J]. Molecular Ecology, 2010, 11(12): 2571-2581.
[5] Basnet C B, Foulds L R, Wilson J M. Scheduling contractors' farm-to-farm crop harvesting operations[J]. International Transactions in Operational Research, 2006, 13(1): 1-15.
[6] Schneider M. The vehicle-routing problem with time windows and driver specific times[J] European Journal of Operational Research, 2016, 250(1): 101-119.
[7] Ma H, Cheang B, Lim A, et al. An investigation into the vehicle routing problem with time windows and link capacity constraints[J]. Omega, 2011, 40(3): 336 -347.
[8] Ribeiro G M, Laporte G. An adaptive large neighborhood search heuristic for the cumulative capacitated vehicle routing problem[J]. Computers and Operations Research, 2011, 39(3): 728-735.
[9] Guan S, Nakamura M, Shikanai T, et al. Resource assignment and scheduling based on a two-phase metaheuristic for cropping system[J]. Computers and Electronics in Agriculture, 2009, 66(2): 181-190.
[10] Guan S, Nakamura M, Shikanai T, et al. A two-phase metaheuristic for farm work scheduling[J]. IFIP Advances in Information and Communication Technology, 2009, 1(295): 1999-2010.
[11] Alaiso S, Backman J, Visala A. Ant colony optimization for scheduling of agricultural contracting work[J]. IFAC Proceedings Volumes, 2013, 46(18): 133-137.
[12] Seyyedhasani H, Dvorak J S. Reducing field work time using fleet routing optimization[J]. Biosystems Engineering. 2018, 169: 1-10.
[13] Seyyedhasani H, Dvorak J S. Dynamic rerouting of a fleet of vehicles in agricultural operations through a dynamic multiple depot vehicle routing problem representation[J]. Biosystems Engineering. 2018, 171: 63-77.
[14] MaC, LiuP, XuX. Vehiclesrobustschedulingofhazardousmaterialsbasedonhybridparticleswarmoptimizationandgeneticalgorithm[J]. IETIntelligentTransportSystems, 2020, 14(14):1955-1966
[15] TuaniAF, KeedwellE, CollettM. Heterogenousadaptiveantcolonyoptimizationwith3-optlocalsearchforthetravellingsalesmanproblem[J]. AppliedSoftComputing, 2020, 97(4):106720.
[16] 李洪,姚光强,陈立平.基于GPS、GPRS和GIS的农机监控调度系统[J].农业工程学报,2008,24(增刊2):119-122.
Li Hong, Yao Guangqiang, Chen Liping. Farm machinery monitoring and scheduling system based on GPS, GPRS and GIS[J].Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2008, 24(Supp. 2): 119-122. (in Chinese with English abstract)
[17] 张璠,滕桂法,马建斌,等.基于启发式优先级规则的农机调配算法[J].农业工程学报,2012,28(10):78-85.
Zhang Fan, Teng Guifa, Ma Jianbin, et al. Farm machinery scheduling and allocating based on heuristic priority rules[J].Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28 (10): 78-85. (in Chinese with English abstract)
[18] 张璠,滕桂法,苑迎春,等.农机跨区作业紧急调配算法适宜性选择[J] .农业工程学报,2018,34(5):47-53.
Zhang Fan, Teng Guifa, Yuan Yingchun, et al. Suitability selection of emergency scheduling and allocating algorithm of agricultural machinery[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(5): 47-53. (in Chinese with English abstract)
[19] 吴才聪,蔡亚平,罗梦佳,等.基于时间窗的农机资源时空调度模型[J].农业机械学报,2013,44(5):237-241,231.
Wu Caicong, Cai Yaping, Luo Mengjia, et al. Time-windows based temporal and spatial scheduling model for agricultural machinery resources[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(5): 237-241,231. (in Chinese with English abstract)
[20] 王雪阳,苑侗侗,苑迎春,等.带时间窗的农机调度方法研究[J].河北农业大学学报,2016,39(6):117-123.
Wang Xueyang, Yuan Tongtong, Yuan Yingchun, et al. A Study on method of agricultural scheduling with time window[J]. Journal of Hebei Agricultural University. 2016, 39(6): 117-123. (in Chinese with English abstract)
[21] 马军岩,袁逸萍,任年鲁,等.多区域协调调度架构下的农机服务资源优化配置方法[J].中国农业大学学报,2020,25(4):113-122.
Ma Junyan, Yuan Yiping, Ren Nianlu, et al. Optimal allocation of agricultural machinery service resources under multi-regional coordinated scheduling architecture[J]. Journal of China Agricultural University, 2020, 25(4): 113-122.(in Chinese with English abstract)
[22] 潘帅,陈钰成,高元,等.带软时间窗的多种服务需求车辆调度问题及其禁忌搜索算法研究[J].武汉理工大学学报:交通科学与工程版,2020,44(6):1123-1128.
Pan Shuai, Chen Yucheng, Gao Yuan, et al. Research on the vehicle scheduling problem of multiple service demands with soft Time window and its tabu search algorithm[J]. Journal of Wuhan University of Technology: Transportation Science and Engineering Edition, 2020, 44 (6): 1123-1128. (in Chinese with English abstract)
[23] 凌海峰,谷俊辉.带软时间窗的多车场开放式车辆调度[J].计算机工程与应用,2017,53(14):232-239.
Ling Haifeng, Gu Junhui. Study on multi-depot open vehicle routing problem with soft time windows[J]. Computer Engineering and Applications, 2017, 53(14): 232-239. (in Chinese with English abstract)
[24] 张惠珍,刘云,倪静.基于客户满意度的MOVRPFTW的单亲遗传混合蚁群算法[J].系统管理学报,2019,28 (5):927- 933.
Zhang Huizhen, Liu Yun, Ni Jing. MOVRPFTW's partheno-genetic hybrid ant colony algorithm based on customer satisfaction[J]. Journal of System Management, 2019, 28(5): 927-933. (in Chinese with English abstract)
[25] 唐丽敏,张雅茹,潘相君,等.带双时间窗约束的粮食专用车调度优化[J].上海海事大学学报,2021,42 (1):50-55.
Tang Limin, Zhang Yaru, Pan Xiangjun, et al. Scheduling optimization of special grain vehicles with dual time windows constraints[J]. Journal of Shanghai Maritime University, 2021, 42(1): 50-55. (in Chinese with English abstract)
[26] Sundaranarayana D, Suresh A, Saravanan G. A improved genetic algorithm based proficient resource management and scheduling[J]. Materials Today: Proceedings, 2020, 481(11): 1-7.
[27] Kuo R J, Zulvia F E. Hybrid genetic ant colony optimization algorithm for capacitated vehicle routing problem with fuzzy demand-a case study on garbage collection system[C]. 4th Intemational Conference on Industrial Engineering and Applications. IEEE, 2017: 244-248.
[28] 张帆,罗锡文,张智刚,等.基于改进多父辈遗传算法的农机调度优化方法[J].农业工程学报,2021,37(9):192-198.
Zhang Fan, Luo Xiwen, Zhang Zhigang, et al. Optimization method for agricultural machinery scheduling based on improved multi-parent genetic algorithm[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2021, 37(9): 192-198. (in Chinese with English abstract)
[29] 王占中,赵利英,曹宁博.基于多层编码遗传算法的危险品运输调度模型[J].吉林大学学报:工学版,2017,47(3):751-755.
Wang Zhanzhong, Zhao Liying, Cao Ningbo. Hazardous material transportation scheduling model based on multilayer coding genetic algorithm[J]. Journal of Jilin University: Engineering and Technology Edition, 2017, 47(3): 751-755. (in Chinese with English abstract)
[30] 叶文超,张小花,廖东东,等.基于Android的农机调度与管理平台设计与应用[J].仲恺农业工程学院学报,2019,32(3):53-57.
Ye Wenchao, Zhang Xiaohua, Liao Dongdong, et al. Design and application of agricultural machinery scheduling and management platform based on Android[J]. Journal of Zhongkai University of Agricultural Engineering, 2019, 32(3): 53-57. (in Chinese with English abstract)
[31] 刘振宇,梁建平.基于BDS的农机精确调度和高效作业平台设计与应用[J].中国农机化学报,2018,39(10):97- 102.
Liu Zhenyu, Liang Jianping. Design and application of accurate scheduling and efficient operation platform for agricultural machinery based on BDS[J]. Chinese Journal of Agricultural Machinery Chemistry, 2018, 39(10): 97-102. (in Chinese with English abstract)
[32] 朱登胜,方慧,胡韶明,等.农机远程智能管理平台研发及其应用[J].智慧农业(中英文),2020,2(2):67-81.
Zhu Dengsheng, Fang Hui, Hu Shaoming, et al. Development and application of remote intelligent management platform for agricultural machinery[J]. Smart Agriculture (Chinese and English), 2020, 2(2): 67-81. (in Chinese with English abstract)
[33] 曹庆奎,杨凯文,任向阳,等.基于交通流的多模糊时间窗车辆路径优化[J].运筹与管理,2018,27(8):20-26.
Cao Qingkui, Yang Kaiwen, Ren Xiangyang, et al. Multi-fuzzy time window vehicle path optimization based on traffic flow[J]. Operations Research and Management, 2018, 27(8): 20-26. (in Chinese with English abstract)
[34] Qamsari A, Hosseini-Motlagh S M, Ghannadpour S F. A column generation approach for an inventory routing problem with fuzzy time windows[J]. Operational Research, 2020: 1-51.
[35] 张浩为,谢军伟,张昭建,等.基于混合自适应遗传算法的相控阵雷达任务调度[J].兵工学报,2017,38(9):1761-1770.
Zhang Haowei, Xie Junwei, Zhang Zhaojian, et al. Task scheduling of phased array radar based on hybrid adaptive genetic algorithm[J]. Acta Armamentarii, 2017, 38(9): 1761-1770. (in Chinese with English abstract)
Multi-site and multi-machine cooperative instant response scheduling system based on fuzzy membership
Huang Huang1,2, Chen Yanyan1,2, Zhu Ming1,2, Liu Yadong1, Zhang Zhenfu1
(1.430070;2.430070)
This study aims to realize the joint deployment of multiple agricultural machinery stations, particularly for the real-time job orders. A mathematical model with a fuzzy time window was also established to minimize the total scheduling time and the number of dispatching agricultural machinery. Some factors were comprehensively considered, such as farmers' satisfaction, the cooperation of multiple agricultural machinery stations, the number of orders, the area of farmland, and the location coordinates. An improved genetic method (GA) with excellent parent genes was designed to fulfill the task of multi machine station responding to the demand of multi farmland. At the same time, the agricultural machinery was allocated in the shortest time to implement the operation requirements of each farmland, according to the shortest path. A case study was carried out to verify the model and the visual interface, including three stations of agricultural machinery and 35 operation orders of farmland in a certain area around Wuhan, Hubei Province of China. The results showed that an excellent searching and stable convergence were achieved in the scheduling system of agricultural machinery. Specifically, the reduction rate of the total scheduling distance was 9.89%, and the reduction rate of the number of agricultural machinery was 15.38%, when the fuzzy membership degree was 0.8. An optimal number of real-time orders accepted by a single farm station was not more than 20, according to the actual situation of the agricultural machinery quantity in each station. Furthermore, the improved GA presented a better performance than the hybrid genetic in general, indicating the less calculation time of the deployment, the more reasonable allocation of tasks, and the reduced scheduling distance. The multi-site and multi-machine cooperative instant repose scheduling was also considered the joint deployment agricultural machinery and fuzzy time window in the modeling. There was a higher accuracy of the scheduling operation on agricultural machinery, and the fully considered satisfaction of farmers, even though the complexity of model increased, compared with the scheduling operation at a single agricultural machinery station. In the scheduling algorithm, the crossover and mutation operators were improved to reduce the risk of the operation data falling into the local optimal solution with the less running time. Consequently, the scheme can be widely expected to completely deal with agricultural machinery scheduling under complex backgrounds, fully meeting the cooperative operation of multiple agricultural machinery stations for the real-time operation needs of farmers. This finding can provide a strong support to the cost-saving and high efficiency of operation on agricultural machinery in modern agriculture.
agricultural machinery; dispatching; fuzzy time window; genetic algorithm; immediate response
10.11975/j.issn.1002-6819.2021.21.009
S232.3
A
1002-6819(2021)-21-0071-09
黄凰,陈燕燕,朱明,等.基于模糊隶属度的多站点多机协同即时响应调度系统[J]. 农业工程学报,2021,37(21):71-79.doi:10.11975/j.issn.1002-6819.2021.21.009 http://www.tcsae.org
Huang Huang, Chen Yanyan, Zhu Ming, et al. Multi-site and multi-machine cooperative instant response scheduling system based on fuzzy membership[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2021, 37(21): 71-79. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2021.21.009 http://www.tcsae.org
2021-06-04
2021-10-23
国家自然科学基金项目(71503095);湖北省农业科技创新行动;中央高校基本科研业务费专项资金资助项目(2662015QC017,2662014BQ037);中国工程院咨询项目(2019-ZD-5)
黄凰,博士,讲师,研究方向为农业机械化与农业智能化管理。E-mail:wmyhuang@qq.com
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
小猕猴智力画刊(2022年3期)2022-03-29
小猕猴智力画刊(2022年3期)2022-03-28
今日农业(2021年1期)2021-11-26
北京航空航天大学学报(2021年6期)2021-07-20
汽车工程(2021年12期)2021-03-08
北京航空航天大学学报(2019年9期)2019-10-26
电子制作(2019年16期)2019-09-27
计算机测量与控制(2019年6期)2019-06-27
电子制作(2019年24期)2019-02-23