
基于自然驾驶数据的驾驶人换道决策识别研究*
2022-01-22 07:24蒋司杨李朝雷毅王畅
汽车技术 2022年1期
蒋司杨 李朝 雷毅 王畅
(长安大学,西安 710064)
主题词人机共驾 换道决策 极端梯度提升 网格搜索
1 前言
智能驾驶系统难以快速地实现完全自动化,因此在较长一段时间内智能汽车将处于人机共驾的过渡阶段。在人机共驾阶段,智能驾驶系统实现驾驶辅助、冲突轨迹纠正以及正确地接管驾驶控制的前提是已具备充分理解驾驶人换道意图与决策的能力。
对驾驶人换道意图与决策的识别已成为智能驾驶领域研究的热点问题,国内外学者对此开展了大量研究。在换道意图识别研究中,通常将驾驶行为划分为换道与车道保持,或左换道、右换道与车道保持。因此,换道意图辨识模型本质上属于分类识别问题,常见的分类识别算法主要基于机器学习,如支持向量机(Support Vector Machine,SVM)、逻辑回归(Logistic Regression,LR)、隐马尔可夫模型(Hidden Markov Model,HMM)、人工神经网络(Artificial Neural Network,ANN)、决策树(Decision Tree,DT)及其集成模型、动态贝叶斯网络等。模型的输入参数,即换道行为的表征参数,可分为交通环境参数、车辆动态参数和驾驶人行为参数。
近年来,随着深度学习的迅速发展,国内外学者将循环神经网络应用于驾驶人换道行为识别中并取得了一定的成果。然而,深度学习算法在模型的可解释性及可靠性方面仍需进一步提升。
目前,针对换道意图与决策识别的研究大多是判断驾驶人是否执行换道,或者是换道方向的辨识,缺乏对换道意图和决策的具体划分。这样可能导致智能驾驶系统无法准确理解驾驶人意图,从而引发人机冲突等矛盾,在带来安全隐患的同时降低了驾驶人对智能系统的信任度及接受度。换道具体决策的辨识也属于分类识别问题,而如何对换道决策进行细分并选取合适的特征参数序列是换道决策识别研究中的关键。
为实现智能系统对驾驶人换道决策的充分理解,本文将驾驶人换道决策细分为强制换道、等待换道、放弃换道和车道保持,在驾驶人实车换道数据基础上,通过分析换道过程提出以自车距目标车道右侧车道线距离、转向盘转角、自车与后车的相对距离的换道行为特征参数组合,并建立基于网格搜索-极端梯度提升(Grid Search-eXtreme Gradient Boosting,GS-XGBoost)模型的驾驶人换道决策识别模型。
2 实车试验
2.1 换道场景与决策
换道场景可分为自由换道场景和非自由换道场景。自由换道场景是指自车车道前方无车且目标车道后方无来车;非自由换道场景是指自车车道前方有车且目标车道后方有来车。为了使智能驾驶系统充分理解驾驶人的换道意图,考虑将换道决策细分。
在自由换道场景下,驾驶人的换道决策比较简单,通常是换道和车道保持2类。而在非自由换道场景中,尤其是当目标车道后方有快速来车的危险情况时,驾驶人会采取多模式的换道决策。因此选取非自由换道场景下目标车道有快速后车的危险情况来研究驾驶人的换道决策。此种场景下的换道决策可分为强制换道、等待换道和放弃换道3类。
如图1 所示,强制换道时,自车认为此时换道不会与快速逼近的后车产生交通冲突,遂决定快速驶入目标车道;放弃换道时,自车认为此时换道有引发交通冲突的可能,于是放弃换道,重新驶回当前车道的中心;等待换道时,自车认为此时换道有引发交通冲突的可能,决定等待后车驶过,再驶入目标车道。等待换道情况1在真实道路中表现为自车在等待目标车道后车驶过的过程中,与目标车道的车道线保持一定距离,待后车驶过后再进入目标车道;等待换道情况2在真实道路中表现为自车在等待目标车道后车驶过的过程中以低速靠近车道线,待后车驶过,再进入目标车道。等待换道策略多见于拥堵或低速路段,在高速路段并不多见。

图1 非自由换道场景下的3种换道决策示意
2.2 被试驾驶人信息
公开招募43名驾驶人开展实车试验以获取换道数据,其中女性驾驶人3名,男性驾驶人40名。试验招募的驾驶人均身体健康,无影响驾驶安全的疾病。为保证数据的代表性,以及考虑到自车换道时与后方快速来车博弈的危险性,所招募的被试驾驶人驾龄均在5 年以上,具有丰富的驾驶经验,基本信息如表1所示。

表1 被试驾驶人基本信息
2.3 试验设备
被试驾驶人的自然驾驶数据会被试验车上搭载的多传感数据采集平台采集和储存,该平台由4 个部分组成,即自车运动参数采集系统、周围交通环境参数采集系统、传感器数据传输系统和驾驶过程记录系统。采集平台通过GPS、车载陀螺仪、车载在线诊断接口(On-Board Diagnostics,OBD)和先进预警系统(Advanced Warning System,AWS)定位车辆轨迹并采集试验车的航向角、经纬度、速度、与左右车道线的距离等自车运动参数信息;通过ESR型毫米波雷达采集试验车辆与周围车辆的相对距离、相对速度、相对角度等自车周围环境参数信息;通过6通道视频监控系统以影像的形式直观地记录驾驶过程。平台通过控制器局域网(Controller Area Network,CAN)总线进行数据传输,将CAN采集卡与电脑连接,从而实现自车和周围车辆行驶数据的实时采集和记录。采集平台部分设备如图2所示。

图2 多传感器数据采集平台
2.4 试验路段和试验过程
为了尽可能多地包含自动驾驶系统的应用场景,本试验在多类型路段上进行,路段信息如表2所示。
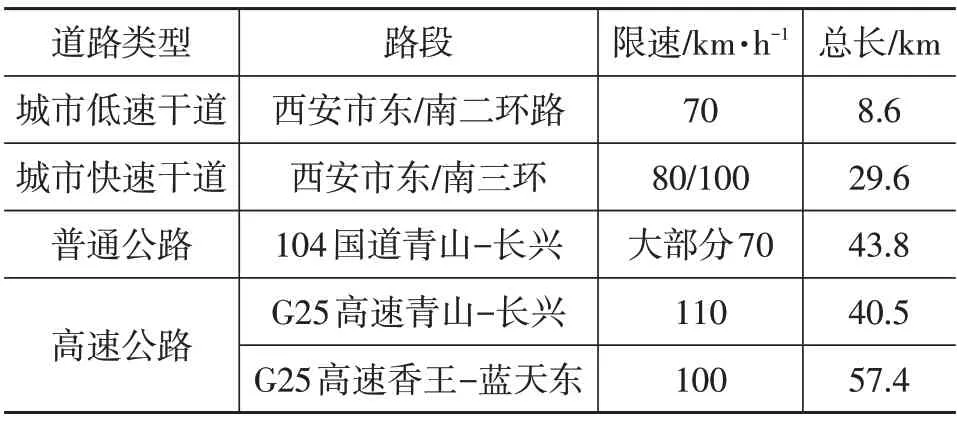
表2 试验路段信息
被试驾驶人被随机分配到各试验线路上,且各试验路线上除试验车外,其他车辆均为正常行驶的车辆。在试验开始前,被试驾驶人在研究人员指导下熟悉试验车。试验过程中,被试驾驶人不佩戴任何仪器,按照自身驾驶习惯自由行驶在指定路线上,并自主换道。由于本文关注后方快速来车对自车换道决策的影响,因此试验存在一定的危险性。为保证试验的安全,试验车上配备一名安全员,安全员仅在出现危险时为被试驾驶人提供协助,其他情况下不干扰驾驶。另外,为避免因被试驾驶人驾驶负担过重而导致的安全问题,单次试验的持续时间控制在1 h左右。
3 换道数据提取与分析
3.1 换道数据提取与预处理
为了研究目标车道后方快速来车对自车换道行为的影响,所提取的数据应包含换道行为开始后自车的运动信息和后方快速来车的运动数据。换道样本数据提取与处理过程如下:
a.确定大致换道片段:将自车已开始执行换道操作,但还未进入目标车道时,目标车道上车速大于自车车速的后车定义为后方快速来车。利用视频和雷达确定自车换道时是否有后方快速来车,若有,则根据视频大致确定换道片段并截取这一片段的所有数据。
b.换道数据提取:将车辆开始持续产生横向运动的时刻定义为换道行为的起点,将车辆首次结束持续横向运动的时刻定义为换道行为的终点。利用数据采集平台上的AWS实时采集试验车左前轮与车辆所处车道左侧车道线的距离、右前轮与车辆所处车道右侧车道线的距离。虽然和可以在一定程度上反映车辆的横向运动情况,但是当试验车中心越过目标车道右侧车道线后,系统的参考车道会从当前车道变为目标车道,这会使数据发生突变。
为了便于观测车辆的横向运动情况,将目标车道右侧车道线设置为参考车道线,换算得到自车左侧车轮与目标车道的距离,如式(1)和图3所示:
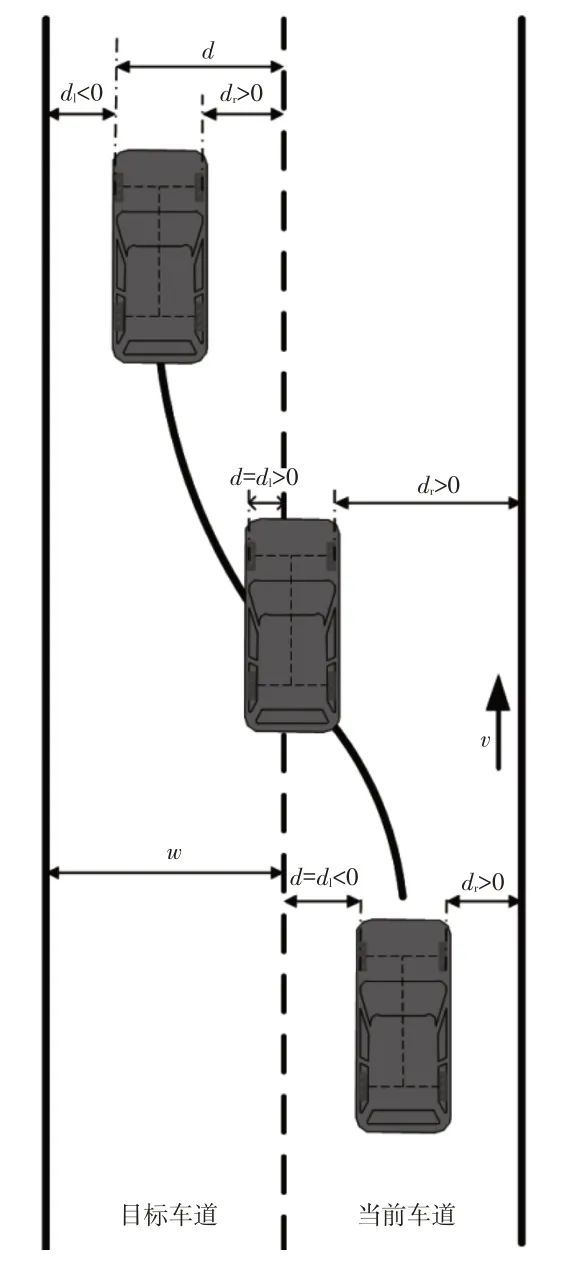
图3 AWS测距示意

式中,为车道宽度,取375 cm。
根据换算得到的可以观测自车的横向运动情况,从而确定准确的换道起止时刻,然后从步骤a中确定的换道片段中提取出相应的换道样本数据。通过确定换道起止时刻如图4所示。
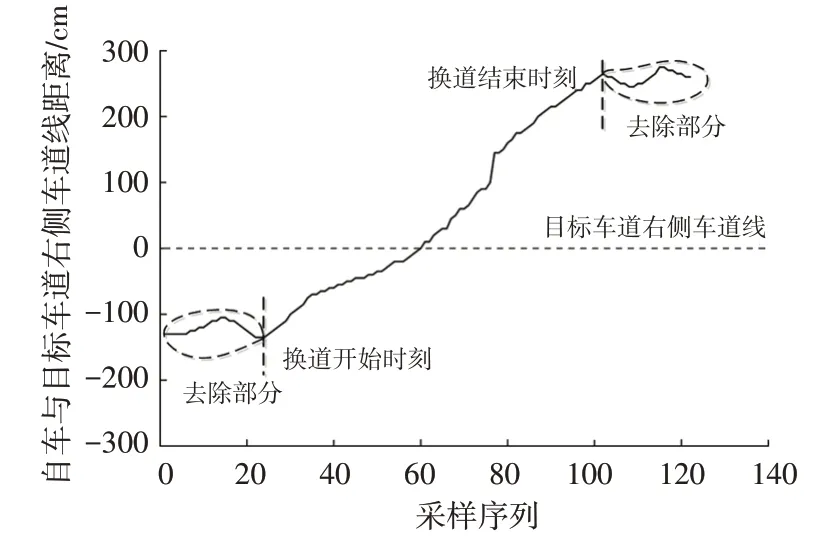
图4 确定换道行为起止点示意
c.换道决策类型确定:结合视频确定步骤b 中的换道样本数据属于本文定义的何种换道决策,为提取的换道样本数据打上标签。
d.数据滤波处理:由于传感器精度有限,采集的数据存在阶跃性,这种阶跃性会弱化数据内部之间的关联性,因此采用卡尔曼滤波处理换道样本数据,部分参数滤波结果如图5所示。

图5 相对距离参数滤波结果
按照以上步骤共筛选出强制换道样本280组,放弃换道样本356 组,等待换道样本44 组,共计680 组换道样本数据。由于车辆换道为持续过程,还筛选了300组车道保持样本数据。
3.2 换道决策识别时刻
换道决策识别时刻是指模型识别出换道决策时识别时间窗口所处的时间点,通过分析该指标可以判别模型的识别能力。为了避免自车在换道时与目标车道后方快速来车产生交通冲突,识别模型应在自车压线前识别出换道行为,因此在选取识别时刻时应参考换道的压线时间。对换道样本的压线时间进行统计分析,结果如图6所示。识别时间窗口选取得过长会降低识别模型的实时性和准确性;选取得过短则会导致时间窗包含的运动信息过少,从而降低识别模型的准确性。综上,选取强制换道的压线时间均值1.9 s为最长的识别时刻,选取0.4 s为最短的识别时刻,采用滑动时间窗口的方法建立驾驶人换道行为识别模型。滑动时间窗口的步长设置为0.1 s,即前、后窗口中有-0.1 s的数据是相同的。

图6 换道压线时间统计分布
3.3 换道特征数据分析
换道过程就是自车通过转动转向盘向目标车道做持续横向移动的过程,而3种换道决策本质上就是自车与目标车道后方快速来车博弈后的不同结果。因此选取转向盘转角、与目标车道右侧车道线的距离以及自车与后车的相对距离作为换道决策识别模型的特征输入参数。其中,和为车辆动态参数,为交通环境参数,2类参数的组合可以提高识别模型的鲁棒性。
将筛选出的980 组样本在1.9 s 识别时间窗内的特征参数数据归一化到[-1,1]。并对比各特征参数在不同换道决策上的分布,结果如图7所示。从图7a和图7b中可知,强制换道决策在和的分布范围最大,车道保持在和的分布范围最小,符合前述对换道过程的分析。归一化后的值越接近1,表明后车距自车越远,越接近-1表明后车距自车越近。而当后车距自车较近时,驾驶人会倾向于认为此时换道会与后车发生交通冲突,从而决定放弃换道或等待换道。由图7c可知,等待换道和放弃换道的值较接近-1,尤其是等待换道,且它们的分布范围也较小,符合2.1节对不同换道决策的定义。

图7 不同换道决策的特征参数对比
进一步对数据进行单因素方差分析,结果如表3所示。结果表明,、和在4类换道决策单元间有显著差异,且具有统计学意义。值为样本数据的组间方差与组内方差的比值,值越大,表明组间差异越显著。从表3的值大小可知,在单元样本间的差异最为显著,这是因为是驾驶人在进行换道决策时最为直观的参考因素。
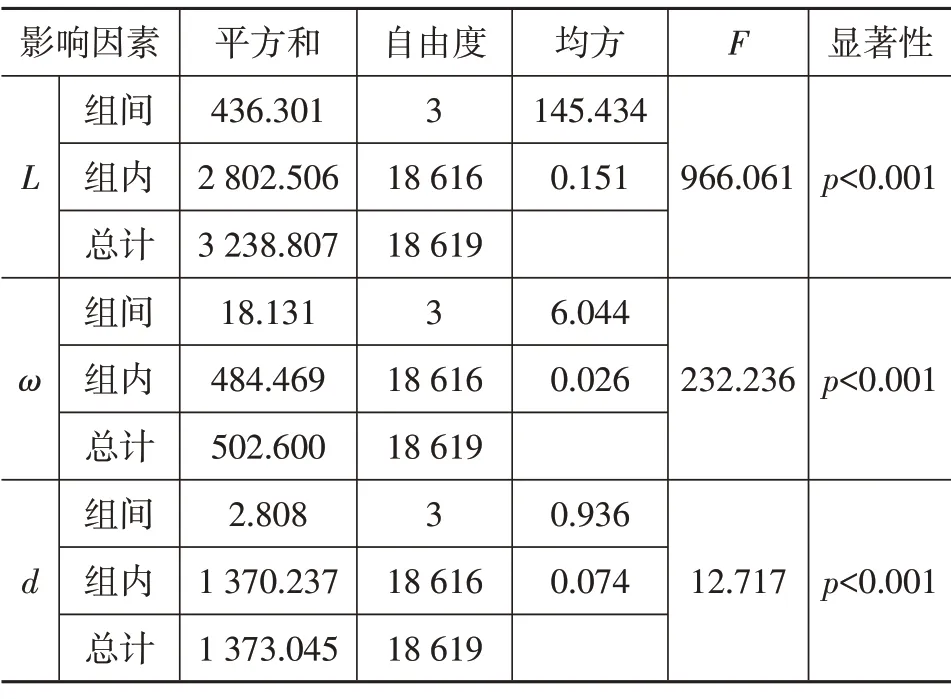
表3 单因素方差分析
4 基于GS-XGBoost的换道行为识别模型
4.1 模型建立
模型对4 类换道决策的识别过程本质上是一个多分类过程。因为XGBoost 在处理多分类问题上性能优越,所以本文选择XGBoost算法,利用转向盘转角、自车与目标车道右侧车道线距离和自车与后车的相对距离组成的换道行为特征参数组来建立各识别时间窗口下的换道决策识别模型。将筛选的样本数据按照4∶1 的比例随机划分为训练集和测试集,如表4所示。
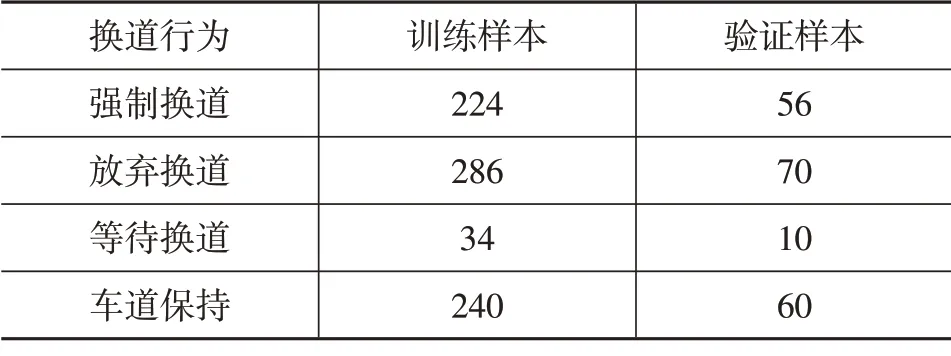
表4 换道行为识别模型所用数据 组
XGBoost 是一种基于Cart 决策树的提升集成算法,在训练前无需对数据进行预处理也可保证极高的准确率,并且能对算法进行详细解释,其强大的并行处理能力也能极大提高运算速度。驾驶人换道行为模式识别模型的训练集为:

式中,=684 个为样本数量,每个样本具有3 个特征;x={}为第个样本的特征数据;y为第个样本的标签,即换道决策类型,y=1~4分别代表强制换道(LC-M)、放弃换道(LC-Y)、等待换道(LC-W)和车道保持行为(LK)。
XGBoost 是一种基于提升(Boosting)集成思想的加法模型,训练时采用贪心算法学习,每次迭代都学习一棵Cart 决策树来拟合之前(-1)棵树的预测结果与真实结果的损失,算法中的迭代次数即为训练决策树的棵数。XGBoost 算法的核心是通过训练达到目标函数的最优值,目标函数为:



重新定义一棵树:

式中,ω为各叶子结点的权重向量;(x)为一棵树的结构,作用是将输入x映射到某个叶子结点。
重新定义一颗树的复杂程度:

式中,为叶子结点的数量;和为常数。
将属于第个叶子结点的所有样本特征数据x划入一个叶子结点样本集合I,此时目标函数可表示为:

定义:

将式(8)带入式(7)得目标函数的最终表达式为:

4.2 模型改进
XGBoost 通过迭代学习提高其预测准确性,但是迭代次数过多会导致模型过拟合,降低模型的泛化性。为了避免识别模型过拟合,对训练集进行5折交叉验证以得到最佳的迭代次数。
XGBoost的参数分为模型参数和超参数2类。其中超参数需要人为设定,并且可通过调整超参数的值提升算法的学习性能。本文采用网格搜索(Grid Search,GS)算法调整超参数。GS 是一种穷举的搜索方法,它将各超参数的可能值进行排列组合,然后将各超参数组合用于模型训练,利用交叉验证评估不同超参数组合模型的表现。对于多分类问题,GS 算法中交叉验证的结果是预测值和真实值的对数损失值,使得对数损失值最小的超参数组合即为最优组合。XGBoost 超参数解释及GS调参范围如表5所示。

表5 XGBoost超参数及GS调参范围
4.3 模型识别准确性评估
本文采用某类换道样本标签的召回率(该类样本中标签被正确预测的数量占该类样本总数的比例)作为模型对某类换道决策识别性能的评价指标;采用准确率(全体样本中标签被正确预测的数量占全体样本总数的比例)作为模型的整体识别性能的评价指标。部分时间窗下的换道行为模型识别结果如图8所示。
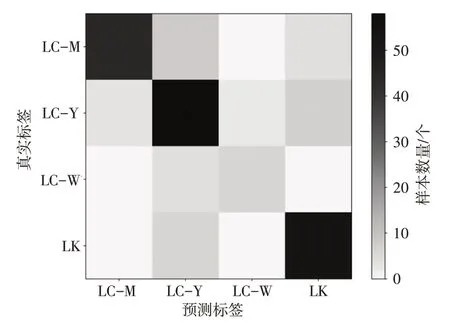
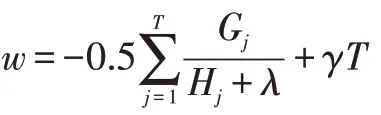
图8 1.4 s识别时间窗换道行为识别模型混淆矩阵
以1.4 s时间窗下的验证结果为例,强制换道、放弃换道、等待换道和车道保持的召回率依次为0.785 7、0.828 6、0.600 0和0.900 0,整体准确率为0.826 5。比较不同时间窗下换道行为识别模型性能,结果如表6和图9所示。
由表6和图9可知:基于GS-XGBoost的识别模型对车道保持的识别性能最好,识别召回率保持在85%~90%范围内;对等待换道的识别率最低,为60%或70%;放弃换道在绝大部分时间窗下的识别召回率在80%~90%范围内。强制换道的识别召回率随时间窗的减小而有减小的趋势,且波动较大。其原因在于:当驾驶人采取车道保持决策时,基本不对车辆执行其他操作,因此表征参数间的识别规律比较显著,模型能较为准确地对其进行识别;等待换道因与放弃换道的特征相似,极易被错误分类为放弃换道,另外等待换道的样本也较少,所以模型对等待换道的识别性能较差;强制换道的平均压线时间为1.9 s,当识别时间窗较短时,强制换道的特征与其他换道行为比较相似,并且此时数据集包含的特征信息较少,因此容易被错误识别。

表6 基于GS-XGBoost的换道行为识别模型识别结果
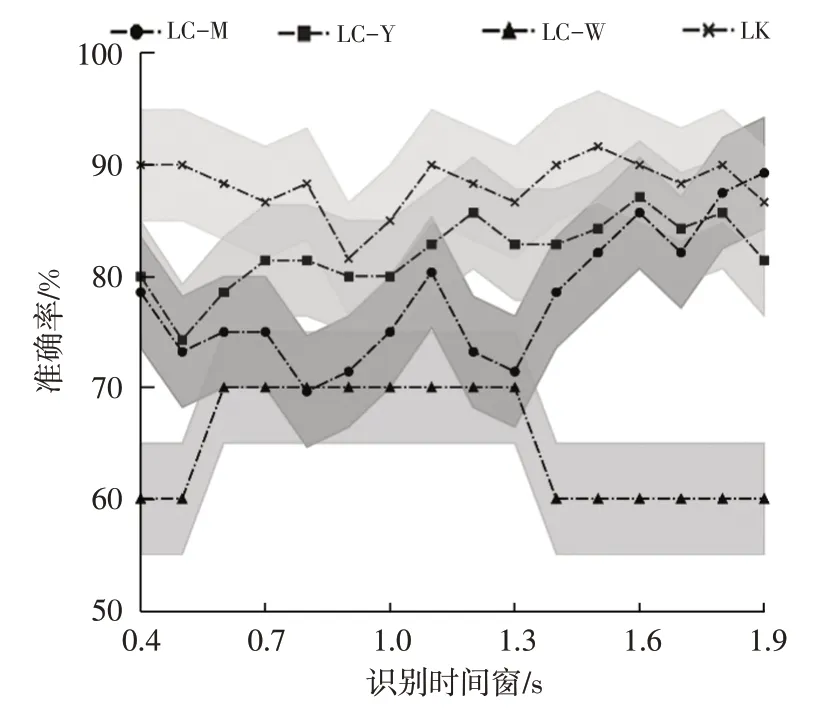
图9 基于GS-XGBoost的换道决策识别模型识别结果
为近一步评估本文建立的换道行为识别模型的识别性能,本文选用经GS改进算法优化后的LR、SVM、DT和梯度提升决策树(Gradient Boosting Decision Tree,GBDT)模型以及LSTM网络分别建立各识别时间窗下的换道决策识别模型,它们的整体识别准确率和时效性对比分别如图10和表7所示。如图10所示,SVM和LR在所有的识别时间窗下的识别性能都低于其他算法,说明这2种算法对4类决策单元特征参数中隐含的信息挖掘能力较差,无法准确地识别真实的驾驶人换道决策。深度学习算法可以使模型对数据的理解更加深入。LSTM网络由于其在处理时序问题时展现出的强大的挖掘能力和深度表征能力,越来越多地被应用到换道意图识别中。但是由于4类换道决策样本不均衡,而决策树集成算法在处理样本不均衡问题上效果比深度学习好,所以LSTM网络在各时间窗下的识别准确率都低于GBDT和XGBoost。表7对比了6种算法最高识别准确率和对应的时间窗,由表7可知,XG⁃Boost可以较早且较准确地将换道决策识别出来。

图10 各识别时间窗下不同算法识别准确率对比

表7 不同算法模型识别时效性对比
综上,就时效性和准确性而言,本文建立的基于GS-XGBoost算法的驾驶人换道决策识别模型优于列出的其他模型。
5 结束语
为实现智能系统对驾驶人换道决策的准确辨识,本文将换道决策细分为强制换道、等待换道、放弃换道和车道保持,通过分析驾驶人实施4类换道决策时自车的行驶状态和周边环境,提出了包括与目标车道右侧车道线距离、转向盘转角和自车与后车的相对距离的换道决策输入特征参数的组合方案,采用滑动时间窗法确定了换道决策的识别时刻,并利用训练集数据建立了各时间窗下基于GS-XGBoost的驾驶人换道决策识别模型。测试集数据验证以及与其他机器学习和深度学习算法的对比结果表明,所提出的识别模型可以较早、较准确地辨识出驾驶人的具体换道决策。细分的换道决策识别模型,可为智能驾驶系统有效理解驾驶人意图与行为提供技术支撑。
本文的识别模型是在实车试验数据的基础上建立的。真实驾驶条件下,等待换道决策出现得不多,因此样本数据不平衡,这是导致模型对等待换道决策识别准确率不够高的重要原因。后续考虑多积累等待样本换道样本以提高模型的识别准确率。
猜你喜欢
汽车实用技术(2022年5期)2022-04-02
青少年科技博览(中学版)(2019年2期)2019-06-20
决策(2018年8期)2018-12-10
小天使·四年级语数英综合(2018年1期)2018-07-04
中学生数理化·高一版(2017年2期)2017-04-25
数学学习与研究(2017年3期)2017-03-09
中国报道(2015年6期)2015-06-19
计算技术与自动化(2014年1期)2014-12-12
中学生数理化·七年级数学人教版(2014年6期)2014-09-18
小天使·四年级语数英综合(2011年4期)2011-06-30
