多信息融合自动泊车系统研究综述
2022-01-20 21:15:46刘畅
内燃机与配件 2022年4期
关键词:传感器
刘畅

Abstract: Automatic parking system can help drivers to better park and reduce psychological pressure when parking. In order to increase the application scenario and success rate of parking system, the key research of multi-information fusion automatic parking system is summarized. This paper introduces the present situation of multi-information parking system from the research and analysis of multi-information fusion system of parking space identification sensor, path planning, controller and sensor, and puts forward the problems and challenges in the development of parking system.
关键词: 自动泊车;传感器;多信息融合
Key words: automatic parking;sensor;multi-information fusion
中图分类号:U463.6 文献标识码:A 文章编号:1674-957X(2022)04-0218-03
0 引言
信息融合技术是由美国科学家率先提出的一种智能化概念,被首次应用于战争中,且在各国的军事中得到一定程度的应用与普及,因此该项技术当前已相对成熟,应用范围也较为广泛。
近年来,随着当下对汽车安全性与驾驶舒适度的追求,智能化与个性化成为汽车发展的新方向。汽车智能化能帮助人们更好的体会到驾驶乐趣,使其向着自动化方向发展,而汽车的自动泊车系统作为智能化的重要体现,受到社会及驾驶者的广泛关注,此项技术是汽车在低速状态下应对复杂泊车环境的应用。其最终目的是帮助驾驶者便捷、快速地开展泊车操作[1-2]。车位识别的精确度决定着泊车的成功率。目前车位识别采用的传感器主要有超声波传感器、图像传感器和激光雷达传感器等[3],其中采用超声波传感器进行车位识别的方案居多。
传统汽车厂商所采用的车位识别方案大多基于单一的超声波传感器对同一车位进行识别,此类方案一旦出现传感器失效或者误判就极有可能引起交通事故。把信息融合技术应用到泊车系统中,能有效提高泊车中车位识别的精度与稳定性。
1 自动泊车系统
当前汽车的自动化泊车系统是由泊车周围环境感知、泊车路径规划及智能跟踪等信息化板块构成。泊车系统通过车载传感器精准感知停车周围的环境,获取汽车的泊位信息,准确计算出车身与泊位线之间的具体几何关系,制定出最佳的泊车路径,最终控制车辆跟踪路径完成泊车操作。
1.1 车位识别常用传感器
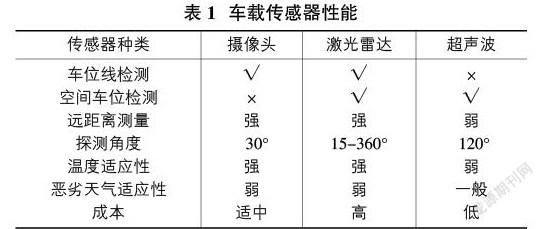
车位识別是路径规划的前提,是泊车系统设计中最为重要的环节。目前的研究主要是利用车载传感器进行车位及障碍物的检测与坐标定位,泊车系统用于车位识别的传感器主要有摄像头、激光雷达、超声波雷达等。
摄像头获得的信息与人眼相似,由于其具有丰富的信息检测能力,常用于车位线车位的检测,但其获得的信息缺少立体性,对于立体空间停车位的检测能力不足,同时其受光线影响严重,在能见度低的环境中很难实现车位的识别。激光雷达具有很强的远距离目标识别能力,可直接检测出目标的距离、速度等信息,并且具有很强的抗干扰能力。激光雷达具有车位线车位与空间车位的检测能力,其可以远距离检测出空间车位,但其车位线检测的分辨率与摄像头相比有较大差距。强烈的太阳光、其他激光信号和沙尘、雨雪等恶劣环境都会影响激光雷达检测的精确度,其还具有成本高,体积大等缺点。超声波具有很强的穿透性与指向性,其受恶劣天气及光线的影响小,具有很强的稳定性,且超声波雷达成本低,体积小。温度对超声波雷达有较大的影响,远距离目标信息测量精度不够。超声波雷达常用于近距离空间车位检测,其不具备停车线车位的检测能力,但其强大的全天候检测能力与低成本使其成为使用率最高的车位检测雷达[4]。各车载传感器性能如表1所示。
1.2 路径规划
路径规划是泊车系统设计的重要步骤,泊车路径规划需要结合车位与障碍物的位置信息,根据车辆最小转弯半径、车长、车宽等车辆自身参数规划出满足避障条件的泊车路径。
目前泊车路径规划的方法大致可以分为三类:基于几何图形的路径规划、基于地图搜索算法的路径规划、基于机器学习模糊控制算法的路径规划。基于几何图形的泊车路径规划方法通常采用圆弧相切法、直线圆弧相切法、多项式路径拟合等方法。圆弧相切法与直线圆弧相切法常用于垂直车位泊车的路径设计中,其设计方法简单,便于实现,但在其圆弧相切处存在曲率突变的过程,会造成原地转向导致轮胎磨损与加重转向助力电机负担的问题。多项式路径拟合方法常用于水平车位的泊车路径规划,其路径曲率虽然连续,但求解复杂,需要较大的计算量,为了妥协计算量与路径精确度常采用五次多项式进行泊车路径拟合,其连续的曲率对控制的要求很高,若控制器对车速与路径跟踪的精度不够很可能会导致泊车失败。基于地图搜索的算法常用A*、D*、RRT等[5],此规划方法通过建立启发函数在泊车传感器识别的地图中根据障碍物与车位位置信息寻找合适的泊车路径,并用曲线平滑路径,其算法的精确度与计算复杂度取决于地图规划栅格的大小,由于其规划时很难考虑到车辆的最小转弯半径与转向速度,所以成功率不高,在进行泊车规划时很少使用此类算法。基于机器学习模糊控制算法的路径规划是根据驾驶员泊车习惯利用模糊控制规则结合机器学习规划出的实时泊车路径,其对泊车环境的实时检测,使泊车系统可以适应于复杂的泊车环境,但同时也对系统软件与硬件的计算能力有了更高要求,同时也需要进行大量的模型训练。
长安大学刘虎[6]利用五次多项式对固定场景障碍物约束下的车辆轨迹进行了曲率优化,实现了泊车路径曲率连续化。大连理工大学王浩杰[7]通过改进RRT算法的扩展方式与采样方式,提高了RRT算法的搜索与泊车避障能力,并用样条曲线进行优化,保证泊车路径的平顺性。合肥工业大学钱立军[8]利用车辆方向盘匀速转动时车辆行驶轨迹,设计了五段泊车路径,通过避障条件优化路径参数,减少了计算量,提高了路径的连贯性。华南理工大学陈鑫[9]提出了基于强化学习算法的泊车路径规划,通过仿真证明了算法较强的规划适应能力与强壮性。湖南大学李红[10]利用B样条曲线对泊车路径进行了规划,并规划了单步与多步的泊车路径方案来适应不同场景的泊车位。
1.3 跟踪控制器
泊车跟踪控制器设计是控制车辆按照规划路径进行泊车。目前常用泊车控制器有PID控制、MPC控制、LQR控制与滑膜控制等。PID控制常用于泊车的纵向速度控制,该算法的实现不需要精确的模型,但其参数优化较为困难,常与机器学习等智能控制算法结合,实现其控制器参数优化。MPC、LQR与滑膜控制用于泊车的纵向路径跟踪控制。MPC可以实时获取最优的在线控制量,其精度与控制器设计的预测层数有关,但其对硬件的计算能力要求较高。LQR控制易于实现,但其在曲率变化较大的泊车路径跟踪中误差较大,对泊车路径规划要求较高。滑膜控制具有很强的抗干扰能力,但由于其不连续的开关特性会造成抖动[11]。
北京交通大学董航瑞[12]提出了一种基于坐标补偿的MFAC预瞄偏差角跟踪方案,此方案不需要车辆模型信息,可适用于多种类型车辆,并通过Matlab仿真证明其控制效果优于PID与原型MFAC控制方案。吉林大学张家旭[13]通过非奇异快速终端滑模理论与双幂次趋近律设计了滑模泊车路径跟踪器,并通过仿真软件,证明了跟踪控制的动态响应特性与鲁棒性有所提高。重庆理工大学宋
佳[14]利用PID控制算法进行了车辆纵向车速控制器和车辆横向车轮转角控制器与航向角控制器的设计,实现对圆弧与直线泊车路径的跟踪。大连理工大学王浩杰[7]基于PID算法对纵向车速进行了控制,并设计了MPC控制器控制车轮转向角,针对泊车工控的特殊性进行了控制器改进,通过泊车仿真验证了控制器精确性。北方工业大学徐春玲[15]利用人工智能控制算法,把泊车过程中车辆的起始位置作为输入条件,并设计深度神经网络的控制模型对车辆泊车过程进行分析,通过Matlab仿真验证了泊车控制器的可靠性。
2 多传感器信息融合
2.1 多传感器信息融合车位识别
各类传感器由于原理不同,在泊车过程中有不同的适用场景,当前泊车车位识别方法主要有基于超声波传感器的空间车位检测与基于摄像头的停车线车位检测。单一的泊车传感器无法适用于多状况的泊车环境,并且在传感器失效或误判时易造成泊车事故,多传感器在泊车上的融合使用能有效弥补单一传感器的缺陷。
国内学者对多传感器融合泊车车位识别进行了探究。江苏大学沈峥楠[16]以模糊推理为多信息的融合算法,利用超声波传感器探测车位纵向深度,轮速传感器探测横向长度,视觉传感器辅助检测轮毂用以检测障碍车辆位姿,有效识别了斜车位。山东理工大学沈刚[17]也使用模糊推理多信息融合算法实现了多状况的空间车位检测,利用超声波传感器对空间车位进行初步检测,再利用激光雷达检测周围障碍物,通过激光点云与投影获得泊车车位与障碍物的坐标位置。扬州大学许亚[18]利用基于深度学习的YOLOV4工具对车位识别进行训练,并对基于MaskRCNN双目测试与激光测距进行融合,提高了车位距离识别的精确度。
多传感器信息融合在车位识别的应用,增加泊车系统对复杂车位的识别,正在逐渐成为泊车系统研究的重点问题。
2.2 多传感器信息融合体系
通过传感器所获信息对目标状态进行估计,根据对各个传感器输入信息进行处理与融合方法的不同,传感器信息融合在结构上可以分为集中式、分布式、混合式三种。
集中式融合结构中传感器数据直接在数据融合中心进行融合,具有灵活的融合算法,可以实现数据的实时融合,且融合精度高,但中央处理器需要同时计算各个传感器的原始数据,对处理器计算能力有较高要求,同时底层传感器缺少信息交互,鲁棒性差。集中式融合结构如图1所示。
分布式融合结构在每个传感器上都有处理单元,传感器获得的信息经过局部处理后再传送到中央处理器进行数据的组合与计算获得融合后结果,其在每个传感器上都设有独立的处理单元,相比与集中式有更快的计算速度与稳定性,但传感器所获信息的损失大于集中式融合结构,跟踪精度较差。分布式融合结构如图2所示。
混合式结构分布由集中式与分布式组合而成,其结合了集中式与分布式的优点,具有较强的灵活性,但结构复杂,对通信与处理器有很高要求。混合式融合结构如图3所示。
3 结束语
文章从自动泊车系统与多传感器信息融合两大方面对多信息融合自动泊车系统进行了介绍,目前泊车路径规划与路径跟踪控制的研究已较为成熟,单传感器泊车系统在使用场景中有很大的局限性,难以满足日常复杂的泊车环境,多信息融合自动泊车系统的研究能有效增加泊车系统的应用场景与泊车成功率。但信息融合自动泊车系统在发展过程中还存在以下问题与挑战:
①在车位识别中多个传感器获得的信息会出现冗余与矛盾,需要在多信息融合过程中解决数据对准,数据关联,错误数据的问题。
②虽然在标准车位的路径规划研究较为成熟,但随着泊车系统车位识别与障碍物检测能力的提升,需要结合当前路径规劃理论对窄车位与多障碍物的泊车路径规划进行深入研究。
③路径跟踪控制器在设计中只考虑跟踪控制性能是不足够的,需要在设计中把环境感知与路径规划结合起来,另外也要考虑到车辆泊车跟踪舒适性。
参考文献:
[1]冯泽,蒙雪敏,孙振保,等.电动汽车整车电子控制器(VCU系统)智能横向泊车服务系统的设计探究[J].科技创新与应用,2019(35):79-80.
[2]江浩斌,叶浩,马世典,等.基于多传感器数据融合的自动泊车系统高精度辨识车位的方法[J].重庆理工大学学报(自然科学版),2019,33(4):1-10.
[3]朴昌浩,禄盛,等.自动泊车系统设计[D].北京:科技出版社,2014.
[4]甄先通,黄坚,等.自动驾驶汽车环境感知[D].北京:清华大学出版社,2020.
[5]熊莹,毛雪松.基于二段多项式的窄空间平行泊车路径规划方.计算机系统应用,2020,29(8):211-216.
[6]刘虎,杨嘉,杨太旗,等.车辆平行泊车系统路径规划与控制研究[J].机电工程技术,2021,50(01):61-63.
[7]王浩杰.自动泊车系统路径规划与跟踪算法研究[D].大连理工大学,2021.
[8]钱立军,胡伟龙,刘庆,吴冰.多段式自动泊车路径规划及其关键技术[J].吉林大学学报(工学版),2016,46(03):785-791.
[9]陈鑫,兰凤崇,陈吉清.基于改进深度强化学习的自动泊车路径规划[J].重庆理工大学学报(自然科学),2021,35(07):17-27.
[10]李红.自动泊车系统路径规划与跟踪控制研究[D].湖南大学,2014.
[11]化祖旭.自动驾驶汽车路径跟踪控制算法综述[J].装备制造技术,2021(06):100-103.
[12]董航瑞.基于无模型自适应控制的自动泊车系统[D].北京交通大学,2014.
[13]张家旭,赵健,施正堂,杨雄.基于回旋曲线的平行泊车路径规划和跟踪控制[J].吉林大学学报(工学版),2020,50(06):2247-2257.
[14]宋佳.垂直泊车车位识别与路径跟踪控制[D].重庆理工大学,2021.
[15]徐春玲.面向平行泊车场景的自动泊车控制策略研究[D].北方工业大学,2018.
[16]沈峥楠.基于多传感器信息融合的自动泊车系统研究[D].江苏大学,2017.
[17]沈刚.基于多传感器信息融合的智能泊车路径规划与跟踪方法研究[D].山东理工大学,2020.
[18]許亚.基于视频识别和激光定位的车位检测系统[D].扬州大学,2020.
猜你喜欢
学苑创造·A版(2023年6期)2023-06-16 01:16:11
小学科学(2022年8期)2022-09-07 07:53:46
商品与质量(2021年43期)2022-01-18 05:27:30
云南化工(2021年8期)2021-12-21 06:37:00
纺织科学研究(2021年1期)2021-12-03 15:04:42
电子制作(2019年22期)2020-01-14 03:16:52
传媒评论(2019年5期)2019-08-30 03:50:18
电子制作(2019年7期)2019-04-25 13:17:14
时代英语·高一(2019年1期)2019-03-13 10:29:48
电子制作(2018年9期)2018-08-04 03:30:58