
面向对象的无人机影像地物分类
2022-01-19 07:53马飞虎徐发东孙翠羽
应用科学学报 2021年2期
马飞虎,徐发东,孙翠羽
华东交通大学土木建筑学院,江西南昌330013
随着新农村建设的推进,农村土地利用越来越受到关注。如何对土地利用信息进行有效的提取,已成为研究的热点。利用传统测量手段采集地物信息会造成人力、物力、财力和时间的浪费。随着近年来遥感技术快速发展,遥感技术已广泛用于土地信息提取。目前研究通常用卫星多光谱提取地物信息[1]。卫星遥感影像因受成本、影像分辨率和天气(如多云)等因素的限制而不利于实际生产。具有操作简单、飞行高度低、影像获取容易、空间分辨率高等优点的小型无人机发展迅猛,弥补了高空卫星遥感的不足[3]。
无人机影像具有丰富的空间信息、几何特征和纹理信息。利用无人机影像可以更有效地提取地物信息。影像存在“同物异谱”和“异物同谱”的现象[4],且无人机航摄影像波段数较少会导致影像光谱分辨率不高。依靠提取影像光谱信息的传统分类方法,难以区分这种“同物异谱”或“异物同谱”的现象,从而导致分类结果不佳,因此不适用于对高分辨率影像进行信息提取。为了有效提取高分辨影像信息,Baatz等[5]提出了面向对象的遥感影像分类方法,该方法是以像素集合为分析单元提取影像信息。利用面向对象分类方法,首先要进行地物分割,分割时要设置一定的均质标准参数,根据影像的光谱信息和形状信息将遥感影像分割成影像对象,每一个对象都是具有相似光谱特征的像素的集合。单一尺度的多尺度分割只能对一种地物有效分割,不能同时把所有地物分割到最佳效果,所以地物会出现“欠分割”和“过分割”的现象[6],导致分类结果不理想。本文利用分层次多尺度分割,对每一层进行最优尺度分割[7],根据无人机影像的光谱、纹理、形状、空间分布等特征信息并结合池塘的矢量信息,在各层次中对地物进行分类,对土地信息提取进行研究。
1 研究区概况与影像数据预处理
1.1 研究区概况
本文选取广东省潮州市某山区村庄为研究区,其耕地和居住区为平地,其他区域为树木覆盖的山地。4月份植被较为茂密而耕地作物较为稀疏,可以有效区分耕地,故数据采用2015年4月获取的包含红、绿、蓝3个波段的无人机影像,如图1所示。影像分辨率为0.2 m,数据尺寸大小为5 201像素×5 201像素。从图1中可以看出,耕地覆盖的作物比较稀疏,部分耕地还未复耕。研究区地物信息为房屋、道路、植被、耕地、池塘,其中耕地分为农作物耕地和裸土耕地。

图1 无人机影像Figure 1 UAV image
1.2 数据预处理
对获取的原始无人机影像进行预处理。由于无人机在飞行时受到风的影响会导致飞行姿态不稳定且相机镜头也会出现畸变,故采用定位定姿系统(position and orientation system,POS)数据对影像数据进行校正,主要包括畸变差校正、空中三角测量及正射影像生成[8]。预处理的大致过程为利用POS提供的3个飞行姿态角解算旋转矩阵:首先构建影像的4个角点坐标,利用共线方程求出原始影像和正射影像的关系;然后在像平面坐标加入适当的畸变模型,再将像平面坐标转换为影像下标,根据内方位元素解算影像的畸变值;最后通过灰度插值得到校正后影像。
2 研究方法
2.1 最优尺度选择
本文采用eCoginition软件提取地物信息,在不同层对影像进行多尺度分割。分层多尺度分割时采用由上至下的迭代分割,多尺度分割时需要设置波段权重、分割尺度、形状因子、异质性因子等参数,这些参数直接影响分割的效果。异质性因子包括形状异质性因子和光谱异质性因子,二者权重之和为1;形状异质性又包括紧致度异质性和光滑度异质性,二者权重之和为1[9]。因此确定了形状异质性因子(shape)权重和紧致度异质性(compactness)的权重就能够确定光谱异质性因子和光滑度异质性的权重。参数的选择对分割效果影响很大,分割结果越好,分类精度越高。由于存在池塘的矢量数据,在影像层分割研究区的池塘时,可以利用池塘矢量数据与多尺度分割结合进行分割,也可以用棋盘分割结合矢量进行分割。不同的分割方法主要影响分割时间,但对于分割结果的精度影响较小,分割尺度需设置较大。分割其他地物时,各波段权重均设置为1,以10为初始分割尺度,shape和compactness的初始值为0.1,且均在0.1~0.9依次取值[10]。分割试验时的步长为5,逐次递增进行分割实验,直到得到最优分割尺度。研究发现,在适宜分割道路和耕地的情况下,其他地物出现“欠分割”,在适宜分割房屋的情况下,道路和耕地出现“过分割”,植被出现“欠分割”。在适宜分割植被的情况下,其他地物除了池塘外出现“过分割”。最优分割参数如表1所示。

表1 多尺度分割分类层次Table 1 Classif ication levels based on multi-scale segmentation
2.2 不同分割层上地物信息分类
本文在不同分割层对影像进行多尺度分割分类,具体流程步骤如下:
步骤1在Level 1分割层进行池塘分类
研究区部分农田改造成池塘将用于水产养殖,故事先获取了池塘的矢量信息。池塘作为矢量参与分割,所以采用标准最邻近法对池塘进行分类,该方法在分类时无需定义分类规则,只需选取类别的样本,并进行特征统计分析。以该特征为中心计算影像对象距离各类样本特征的距离,将距离最近的影像对象归为相对应的类别[11]。如图2所示的结果表明,池塘分类完整、边界清晰。
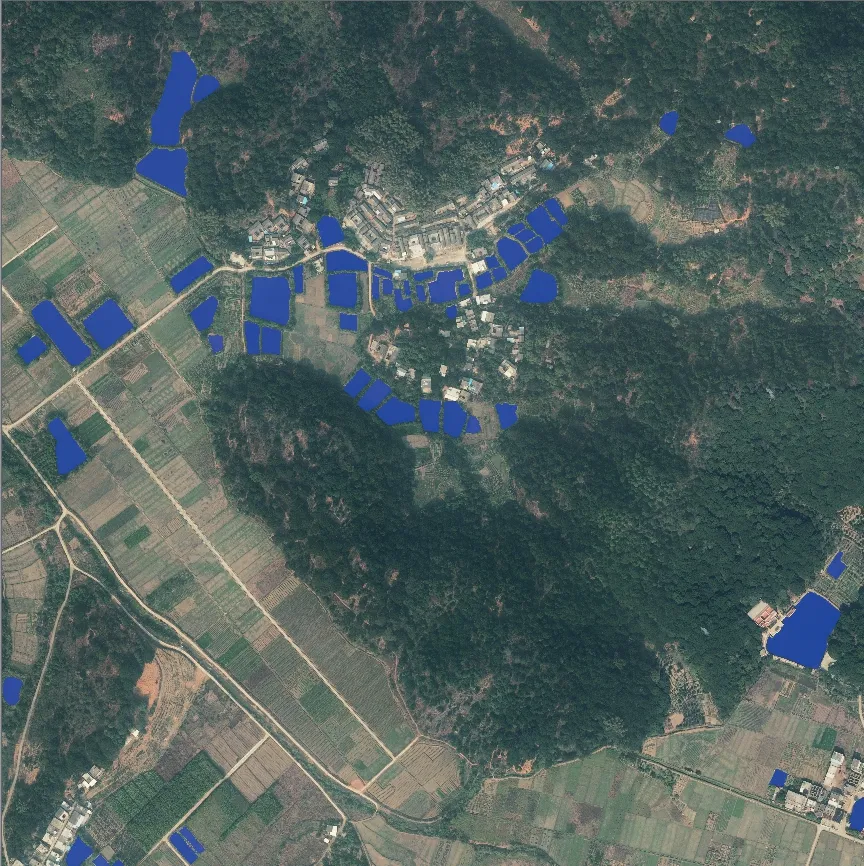
图2 Level 1分割层池塘分类结果Figure 2 Level 1 segmentation layer pond classif ication result
步骤2在Level 2分割层对道路和耕地进行分类
首先将Level 1分割层分类的池塘类别同步到Level 2分割层上。在分割尺度为190、shape值为0.5、compactness值为0.7的情况下,可以有效地分割道路和耕地(农作物耕地和裸土耕地)。利用不同波段的均值可以区分不同地物。经过多次试验发现:红波段均值不易区分植被和农作物耕地等绿色植被,绿波段均值和蓝波段均值均能较好地区分植被和非植被;故采用绿波段均值区分植被和非植被。当时,可以提取出道路、裸土耕地和少量房屋信息。道路和裸土耕地形状特征明显,可通过地物的几何特征如长度(length)、长/宽(length/width)对道路进行分类提取[12]。Length/width≥2.7时,提取出道路信息。剩余部分通过Length>580将道路信息提取出来。但此时信息提取还不完全。道路中含有裸土耕地,根据道路、耕地和植被的亮度不同,通过亮度均值(BR)再进行裸土耕地的提取。

剩余未分类信息中含有农作物耕地,通过设置BR≥81进行提取。提取信息结果包括农作物耕地、裸土耕地和少量房屋。研究发现,红波段均值(mean(R))>106时可以将农作物耕地信息提取出来。多次试验表明,波段的标准差可以较好地区分裸土耕地和房屋。在裸土耕地中利用红波段标准差大于20将房屋信息提取出来并删除[13]。在剩余类别中利用绿波段均值(mean(G))<107.9将非农作物耕地信息提取出来,在非农作物耕地中仍然含有农作物耕地,因农作物形状规整,可以利用length>312和蓝波段标准差小于16.33进行农作物耕地信息的提取。农作物耕地中含有少量非农作物耕地,农作物耕地形状特征明显,可通过length>296和形状指数特征I小于1.885进行农作物耕地信息的提取,并删除剩余非农作物耕地信息。

式中:L为影像对象的边界长度;S为影像对象的面积。分类结果如图3所示。
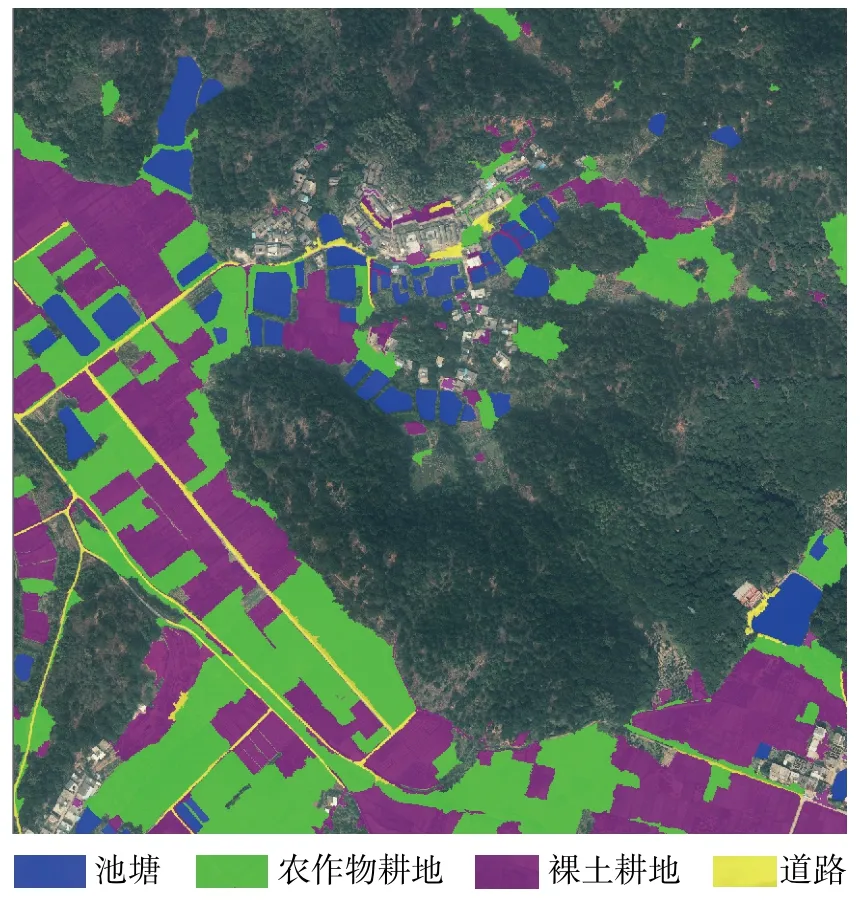
图3 Level 2分割层分类结果Figure 3 Level 2 segmentation layer classif ication result
步骤3在Level 3分割层对植被进行分类。
通过原始影像可以发现,该研究区植占比较大,且与其他地物的边界较明显。首先将Level 2分割层分类结果同步到Level 3分割层上。实验中发现蓝波段均值和绿波段均值都能较好地区分植被,因此选用mean(B)<100提取植被地物信息。剩余未分类的地物为房屋、低矮灌木和少量未分类的农作物耕地。因为个别瓦房在植被内部,远离居民区,所以在下一步房屋分类中将其提取出来。
步骤4在Level 4分割层对房屋进行分类。
首先将Level 3分割层分类的地物同步到Level 4分割层上,房屋大部分为房顶颜色较深的瓦房,其次是房顶颜色稍亮的水泥浇筑房屋,极个别是蓝色屋顶的铁皮房。利用蓝波段均值¯B≥100提取房屋信息,实验发现少量未分类的农作物耕地也被提取在房屋类别之内。通过实验找到最优分类特征,即红绿比值指数(RGBI=mean(R)/mean(G))。在房屋类别中,利用RGBI<0.867对Level3中未被分类提取的农作物耕地进行分类。除少量灌木外其他已大多分类,并将这些灌木分类为植被。分类结果如图5所示。
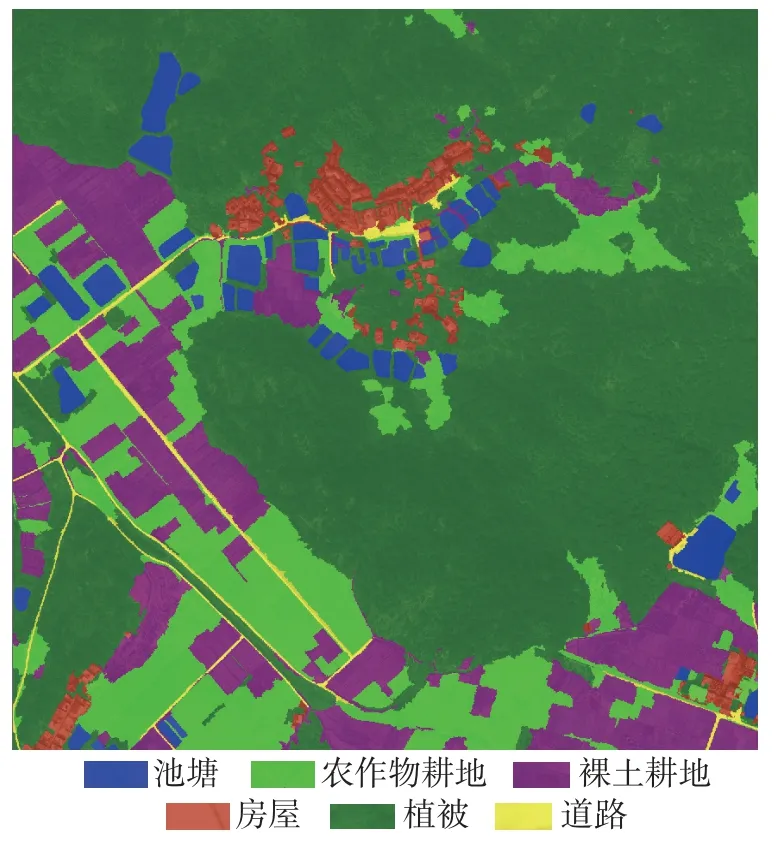
图5 Level 4分割层分类结果Figure 5 Level 4 segmentation layer classif ication result

图4 Level 3分割层分类结果Figure 4 Level 3 segmentation layer classif ication result
3 精度分析评价
为了验证分层次多尺度分割分类的高精度,本文以单一尺度的面向对象分类进行对比分析。将多尺度多层次分类过程中使用的规则应用于单一尺度分类。因分割尺度为190时对耕地和道路信息分割效果最好,故单一分割尺度分类时选择分割尺度为190,shape为0.5,compactness为0.7。由于仅在一个分割层对所有地物进行分割分类,有些分割不理想的地物在分类时会与多层次多尺度分割分类的结果存在一定的差异,因此单一尺度分类运用多层次分割分类的规则时,需微调使用过的参数。

图6 单一尺度分类结果Figure 6 Single-scale classif ication result
分类精度是检验分类方法可行性的首要指标[14],通过人工目译并结合谷歌卫星图获取的734个样本对分类结果利用混淆矩阵进行精度评价。最终得到多层次分割分类误差矩阵和单一尺度面向对象分类误差矩阵表,如表2所示。

表2 分类精度评价Table 2 Classif ication accuracy assessment
由表2可知,本文研究中多尺度分割分类除农作物耕地、植被、房屋外,其他地物的生产精度和用户精度都在90%以上,植被的分类精度较低主要是部分植被光谱与农作物耕地光谱接近,被分类为农作物耕地。单一尺度分类中房屋和植被分类精度较低,主要是因为部分黑色瓦房和植被光谱接近导致错误分类。多尺度分割分类的结果总体精度达到84.20%,kappa系数为0.806 2。而单一尺度分类的结果总体精度为77.11%,kappa系数为0.721 4。单一尺度分类精度低主要原因是单一尺度分割对道路和耕地分割效果较好,而对于其他地物出现较多“欠分割”现象。总体来说,本研究采用的数据和区域内的类别的分类精度更高。
4 结语
本文利用无人机获取研究所用的影像数据,在每一分割层对不同地物信息进行最优分割,然后在不同分割层对研究区最优分割地物进行分类。通过对比实验,多尺度多层次分割分类的分类精度高,可以为土地规划提供更加精确的土地利用信息。虽然此方法能取得较高的精度,但在分类过程中对不同地物最优分割尺度的选取、shape和compactness值的设置都需要人工实验,且提取地物的规则更是因数据的不同而有所差异,对分类者的经验和能力要求较高。如何智能化匹配地物最优分割尺度,减少建立分类规则时的人为干预,是下一步重点研究的目标。
猜你喜欢
今日农业(2022年16期)2022-11-09
今日农业(2022年15期)2022-09-20
今日农业(2022年13期)2022-09-15
今日农业(2021年16期)2021-11-26
现代企业(2021年2期)2021-07-20
高师理科学刊(2016年8期)2016-06-15
邯郸职业技术学院学报(2016年2期)2016-02-27
西藏科技(2015年4期)2015-09-26
河北北方学院学报(自然科学版)(2014年2期)2014-05-30
首都外语论坛(2014年1期)2014-03-20
