基于双模通信的路权控制系统设计
2022-01-19 11:48孙浩凯佟世继
物联网技术 2022年1期
孙浩凯,刘 博,佟世继
(连云港杰瑞电子有限公司,江苏 连云港 222000)
0 引 言
近几年,私家车拥有量快速增加,城市交通压力越来越大,拥堵时间逐步增加,拥堵面积逐年扩大。经常出现交通拥堵的城市也由一、二线蔓延至三、四线。交通压力的增加也促进了城市交通建设理念的不断进步,倡导公共交通、提倡绿色出行成为社会共识。在此背景下,越来越多的城市开通并运营了快速公交(BRT)和智轨列车(ART),提升了城市交通的运行效力。传统交通模式下,通行BRT和ART的专用车道禁止社会车辆进入,在没有公交车辆运行的时间,专用车道处于闲置状态,虽保证了通行安全,但也造成了交通资源的浪费。为了提高专用车道利用率,在保证安全的同时提升交通容量,本文综合了LoRa和ZigBee技术,研究了一种可以安全、高效、有序、可靠地引导社会车辆利用公交专用道的路权控制系统。系统支持状态上传,设备维护简便,兼顾安全原则与路权原则,充分考虑到中国交通现状与特点,对解决城市交通拥堵有着积极的探索意义。
1 系统架构与作用方式
系统由路面信标设备、车载网关设备和后台管理软件组成。
路面信标沿公交专用车道外侧布置,具有指令接收、状态上传和灯态显示功能。车载网关设备安装在BRT或ART车辆内部,可向信标下发控制命令,接收信标上传的状态信息,通过4G网络向后台管理软件上传状态参数。
每个发光信标在出厂时设置唯一ID,所有信标等间距安装,安装时或安装后记录并上传部分信标的GPS信息至后台管理中心。其余信标的GPS信息由后台软件根据信标安装间距自动生成。信标实行分组管理模式,考虑车辆行驶速度和通信时延,每50 m内的信标为一组。每组编号和信标ID按BRT行驶方向递增。
BRT沿公交专用车道行驶时,车载网关以LoRa模式连续向路面信标发送控制命令,车辆前后一定范围内的信标接收指令并做出响应,控制灯态变化。BRT前方300 m范围内信标随车辆行驶依次显示红色灯态,BRT后方200 m范围内信标随车辆行驶依次显示绿灯。BRT靠近信标时,车载网关以ZigBee模式发送状态查询命令,信标接收命令后回传自身状态信息。社会车辆根据信标灯态被允许或禁止进入公交专用车道。为保证社会车辆的视觉效果,信标安装间距应小于2 m。系统架构如图1所示。
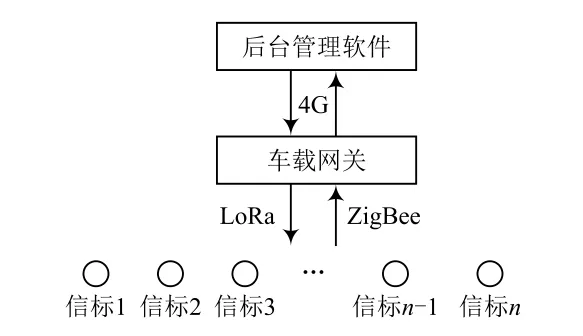
图1 系统架构
2 路面信标硬件设计
信标由壳体、太阳能板、可充电电池、充放电管理单元、微控制器、上行无线数传单元、下行无线数传单元和发光单元组成。总体设计如图2所示。
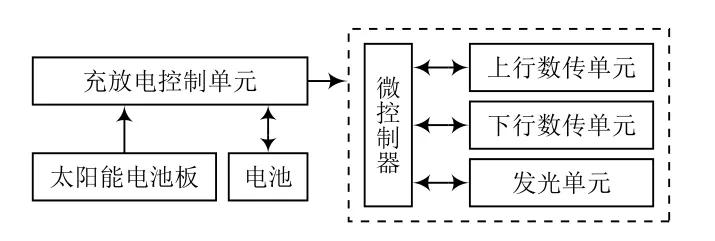
图2 信标硬件总体方案
微控制器选用TI公司MSP430G2553型低功耗MCU,1 MHz频率条件下,电流小于220 μA,休眠电流小于0.1 μA。
太阳能电池板采用浙江奉化金星的S55型太阳能板,单晶硅结构,尺寸为55.5 mm×44.5 mm,输出电压为5.5 V,输出功率为0.4 W。
电池采用广东金凤凰的1 000 mAh三元锂电池,支持-40~70 ℃放电、-30~70 ℃充电。
充放电控制单元中,充电电路采用上海如韵电子的CN3063锂电池充电管理芯片,该器件内部包括功率晶体管,应用时不需要外部的电流检测电阻和阻流二极管。内部包含8位模拟-数字转换电路,能够根据输入电压源的电流输出能力自动调整充电电流,用户不需要考虑最坏情况,可最大限度地利用输入电压源的电流输出能力,适合利用太阳能板等电流输出能力有限的电压源供电的锂电池充电应用。恒压充电电压为4.2 V。当输入电压掉电时,CN3063自动进入低功耗的睡眠模式,此时漏电流小于3 μA。
放电电路中,稳压电源采用赫尔微的HE7233芯片,最大输出电流为350 mA,漏电流为1 μA。该芯片优秀的漏电流指标有助于增加信标的续航能力。充放电管理单元原理如图3所示。
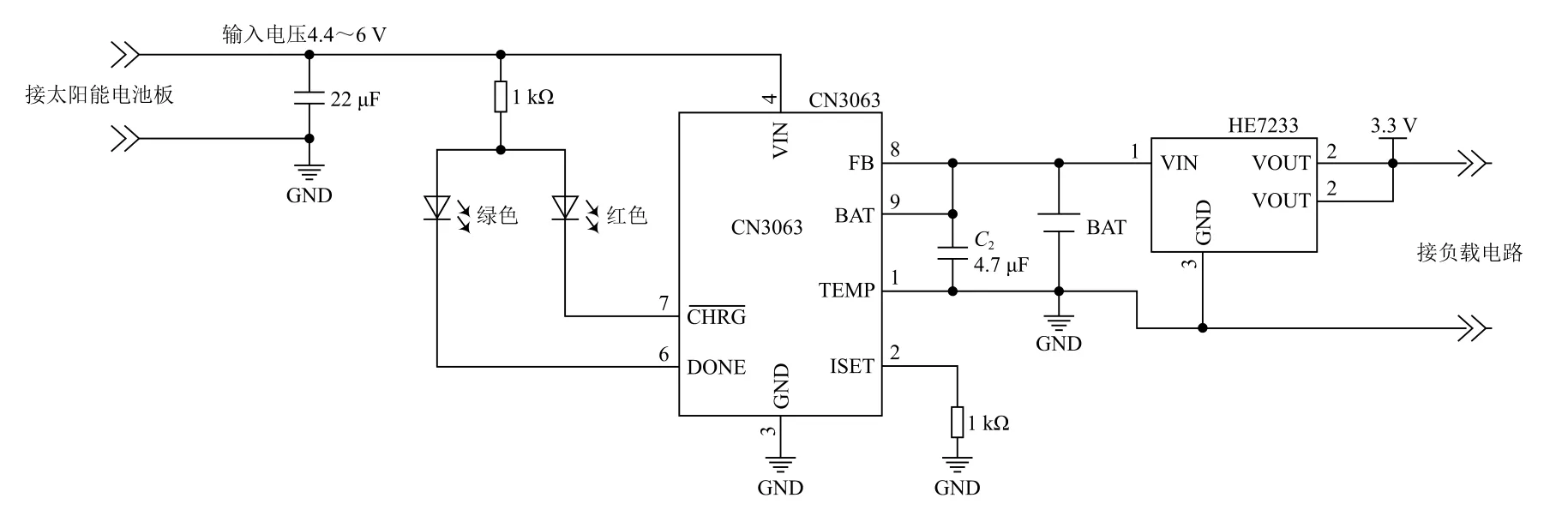
图3 信标充放电管理单元
下行数传单元(信标接收车载网关指令)采用源自军用战术通信系统的LoRa调制方式。相较传统调制方式,其在抑制同频干扰的性能方面具有明显优势,解决了传统设计方案无法同时兼顾距离、抗扰和功耗的弊端,适合小数据量在负载环境中的超远距离传输。硬件选用致远电子的ZM433SX-M型LoRa模块,基于Semtech公司的SX1276芯片,载波频率为410~525 MHz,发射功率为20 dBm,接收灵敏度为-148 dBm,理论最高传输速率为37.5 Kb/s。下行数传单元原理如图4所示。
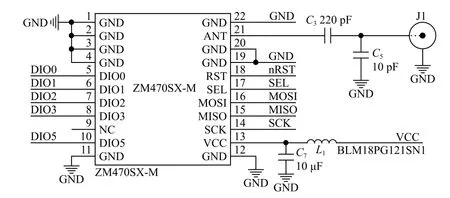
图4 信标下行数传单元
上行数传单元采用ZigBee制式,理论传输速率为250 Kb/s。硬件选用致远电子AW5161型基于NXP5161芯片的ZigBee模块。上行数传单元原理如图5所示。
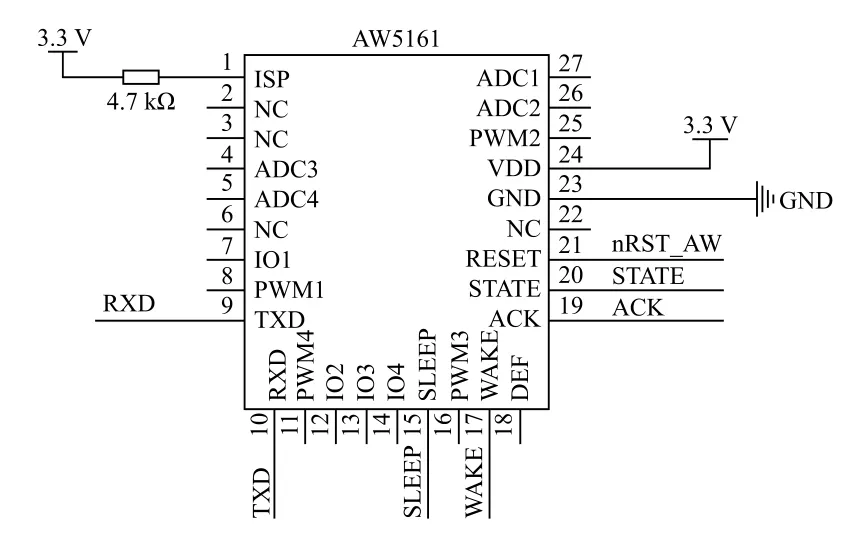
图5 信标上行数传单元
3 车载网关详细系统设计
BRT或ART车辆长度普遍在18 m以上。为保证车载网关与路面信标有良好的通信效果,车载网关采用分布式设计,分为主机和从机两部分,主从机之间通过以太网通信,支持TCP协议,主机为Server模式,从机为Client模式。BRT车辆与主机的数据交互(主要为车辆行驶速度)经路由器通过以太网传输。总体架构如图6所示。主机放置在车头,从机放置在车尾,下行指令传输需要远距离通信,故主机和从机的LoRa天线选用专用的玻璃钢定制天线,放置在车辆外侧。ZigBee天线仅需与车辆附近信标通信,与4G天线一起放置在车内靠窗的隐蔽位置。
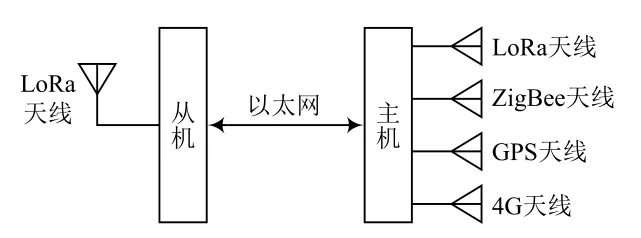
图6 车载网关总体架构
当车辆需要向前方信标下发控制命令时,由主机下发命令。当车辆需要向后方信标下发控制命令时,主机通过以太网将命令发送至从机,由从机下发。
3.1 主机硬件详细设计
主机由电源、控制单元、以太网传输单元、下行数传单元(LoRa)、上行数传单元(ZigBee)、4G通信单元组成。硬件组成如图7所示。
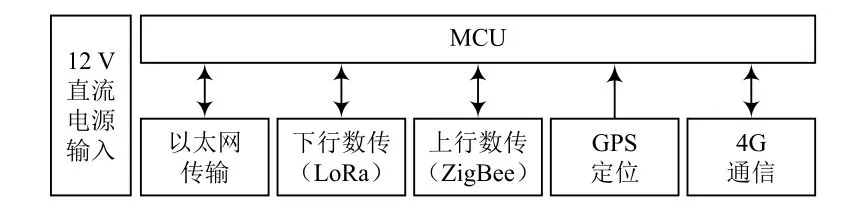
图7 车载网关主机硬件组成
电源采用12 V直流供电,可由车载点烟器获得。
MCU选用STM32F105型单片机,工作主频为72 MHz。
以太网传输单元采用WIZnet公司的W5500型全硬件TCP/IP嵌入式以太网控制器,支持 TCP、UDP、IPv4、ICMP、ARP、IGMP、PPPoE等多种协议;集成了TCP/IP协议栈、MAC层和PHY层,支持客户端或服务端32 KB片上缓存、8个硬件Socket独立通信、SPI总线接口,如图8所示。
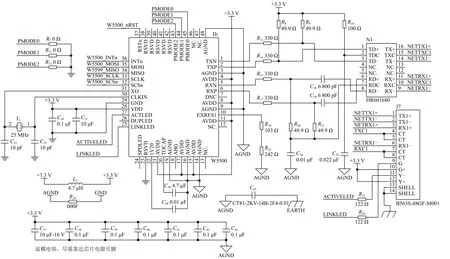
图8 车载网关主机以太网传输单元
下行数传单元和上行数传单元的硬件设计与信标相同。采用致远电子的ZM433SX-M型LoRa通信模块和AW5161型ZigBee通信模块。
GPS定位单元采用天工测控SKG09D型模块,基于联发科MT3333芯片,接收灵敏度达-165 dBm。
4G通信单元采用济南有人物联网公司的WH-LTE-7S4型4G通信模块,有独立SIM卡接口。
3.2 从机硬件设计
从机由电源、控制单元、以太网传输单元、下行数传单元(LoRa)组成,各子单元电路设计与主机相同。组成框图如图9所示。
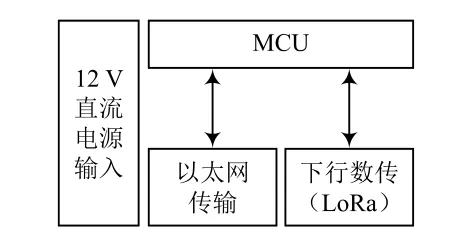
图9 车载网关从机组成
4 传输机制分析及参数计算
4.1 下行传输机制分析及LoRa参数计算
4.1.1 指令下行控制机制分析
车辆行驶时,车载网关根据自身的实时GPS信息、车辆行驶速度和预先配置的信标控制距离(即BRT行驶时控制前后一定距离范围内的信标),结合预先存储的信标的实际GPS信息和分组信息(每50 m距离内的信标为一组),获得车辆前后控制距离范围内(该距离信息已预先配置)信标的组内ID,并对这个目标组信标下发控制指令。
信标收到控制指令后,解析并比较指令中的目标灯态与信标当前灯态。若两者一致,则信标不改变自身灯态;若两者不一致,则信标需改变自身灯态。信标改变自身灯态前,将自身组内ID编号与车载网关下发指令中的延迟时间参数相乘,获得自身延迟执行的时间。保证所有信标按排布顺序依次点亮或熄灭。
4.1.2 LoRa参数计算
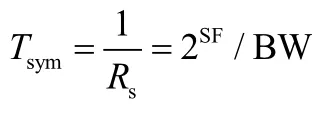
影响LoRa通信距离的参数主要有发射功率、扩频因子SF、带宽BW、编码率CR。LoRa扩频调制技术采用多个信息码片代表有效负载信息的每个位。扩频信息的发送速度称为符号速率,码片速率与符号速率之间的比值为扩频因子。
为获得较远的通信距离,车载网关的发射功率选择最高档20 dBm。
2.2.4 哮喘治疗情况 480例现患哮喘儿童在哮喘发作时使用抗生素者409例(85.21%)、全身或吸入性激素389例(81.04%)、支气管扩张剂340例(70.83%)、抗白三烯治疗310例(64.58%)、免疫调节剂283例(58.96%)、中药治疗339例(70.62%),抗过敏治疗55例(11.46%)和脱敏治疗2例(0.42%)。
SX1276的扩频因子范围为6~12,带宽范围为7.8~500 kHz,循环编码率范围为1~4,对应实际开销比率为1.25~2。
带宽越大,扩频因子越小,传输速率越快,但接收灵敏度越低。其中符号速率=BW/(2),
为节约功耗,信标的LoRa模块在CAD模式下工作,平时休眠,每0.5 s唤醒一次,唤醒后检测是否收到前导码,若收到前导码,则信标转入数据接收模式,随后再次休眠。设前导码传输时间为,负载数据传输时间为,车辆最高行驶速度=100 km/h,信标分组距离=50 m,则需满足>(+)。其中也为信标休眠时间,保证信标不会丢失前导码数据。为充分保证通信的可靠性,车载网关和信标的可靠传输距离应远大于实际需求。综合以上需求和传输距离测试结果,最终选择SF=12,BW=500 kHz,CR=4/8。
LoRa传输时间相关计算公式如下:
(2)有效数据的传输符号数:

其中PL为负载数据字节数+CRC校验字节数,这里为12字节负载数据+4字节CRC校验数据。代入数值得到:


因此,数据包理论传输时间:=+=(730+256) ms=986 ms。
经过实测发现,由于MCU处理延时、CRC校验延时等因素,数据包实际传输时间为1 050 ms。车辆行驶速度为100 km/h时,1 050 ms内车辆行驶距离为29.17 m,远小于信标分组距离50 m。在市中心无线干扰较严重的区域,车载网关与信标之间的实际通信距离为800 m左右,远超过300~400 m的指标需求,有充足的安全余量。
4.2 上行数据传输机制分析及参数计算
4.2.1 上行数据传输机制分析
与下行控制相似,车辆行驶时,根据GPS信息向指定信标发送查询命令;信标收到命令后,上传自身状态信息。有所不同的是,下行控制是按组控制,而上行传输是对信标单点查询。ZigBee采用了CSMA避免碰撞机制,避免信息自动重传时各节点相互干扰。
与LoRa相同,为节约功耗,信标的ZigBee模块平时处于休眠态。当接收到正确的LoRa信息时,根据RSSI粗略判断车辆的距离,并按最高车速计算达到时间,再取一定的提前量,获得唤醒ZigBee模块的等待时间。等待时间到达后,唤醒ZigBee模块,ZigBee接收查询命令并完成上传信息后,转入休眠状态。考虑无线传输不可避免会有丢包现象,为节约功耗,唤醒ZigBee模块后,若超出设定时间仍未接收到查询命令,则自动转入休眠状态。
4.2.2 上行传输参数计算
车载网关下发查询命令起至信标收到查询命令止,耗时10 ms;信标上传状态信息起至车载网关收到状态信息止,耗时10 ms。双向传输共耗时20 ms。车辆行驶速度为100 km/h时,20 ms行进距离为0.6 m。信标安装间距为1 m条件下(典型值),为保证每一个信标的状态信息数据均不丢失,车辆需满足20 ms行进距离小于1 m,即车辆行驶速度<166.6 km/h,远超过100 km/h的车速上限,有着充足余量。
5 信标工作寿命计算
(1)上行链路等效电流计算
信标发射电流144 mA,平均接收电流26 mA。发送耗时8 ms。
假设每次BRT经过时,上行通信单元唤醒时间为20 000 ms,每天经过100次,平均消耗电流:(26 mA×20 000 ms+144 mA×8 ms)×100/(24×3 600 s)≈ 0.60 mA。
(2)下行链路等效电流计算
平均接收电流10.8 mA。接收耗时15.1 ms,接收间隔为0.000 5 ms。平均消耗电流:(10.8 mA×15.1 ms)/0.000 5 ms=0.326 mA。
(3)LED等效电流计算
单颗LED工作电流为10 mA,每次点亮3颗,每次闪烁时长为5 s。
平均消耗电流:(10 mA×3×5 s)/(24×3 600 s)≈0.001 7 mA;无线休眠电流+MCU平均工作电流等于0.8 mA。
总电流=(0.60+0.326+0.001 7+0.8) mA≈1.73 mA。每天消耗电量=1.73 mA×24 h=41.52 mAh,电池电量为1 000 mAh,无光照条件下可持续工作时间:1 000 mAh/1.73 mA=578.0 h≈ 24.1 d。
根据实测结果,太阳能充电电路在标准光照条件下的充电电流可达60 mA,中国日照时间最少的四川、贵州地区,其标准光照条件下的等效年均日照时间为2.5~3.1 h,梅雨季节的等效日照时间为仅为0.8 h。在此条件下,每天可充电电量为60 mA×0.8 h=48 mAh,大于总信标每天消耗电量。因此,在产品寿命范围内,信标可实现无限续航。
6 嵌入式软件流程及后台软件设计
6.1 路面信标嵌入式软件流程
信标嵌入式软件主要分为两个线程,MCU内部通过定时器中断和在主函数设置标志字实现两线程同步执行。如图10所示的线程1中通过LoRa设置灯态流程图。
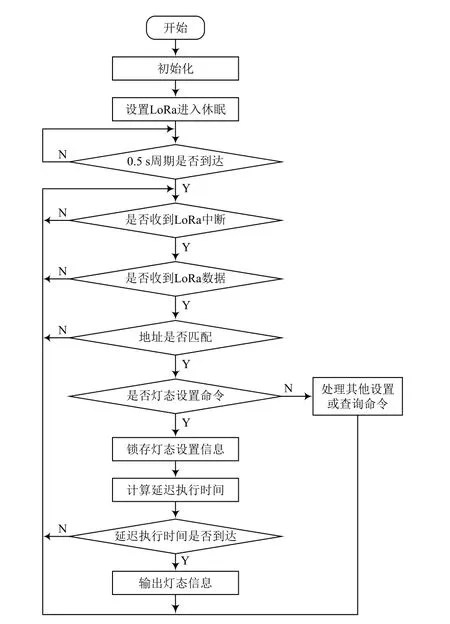
图10 基于LoRa的灯态流程设置
设BRT车辆标准行驶速度=80 km/h,每组信标的分布距离(即从该组第一个信标到最后一个信标的距离)=50 m,经过每组信标的时间为/,信标切换灯态的延迟等待时间为,信标间距=1 m,每组信标数量=50,则有:=信标在组内的相对ID×(/)×/(-1)≈46 ms。
图11为线程2中ZigBee状态信息查询流程。
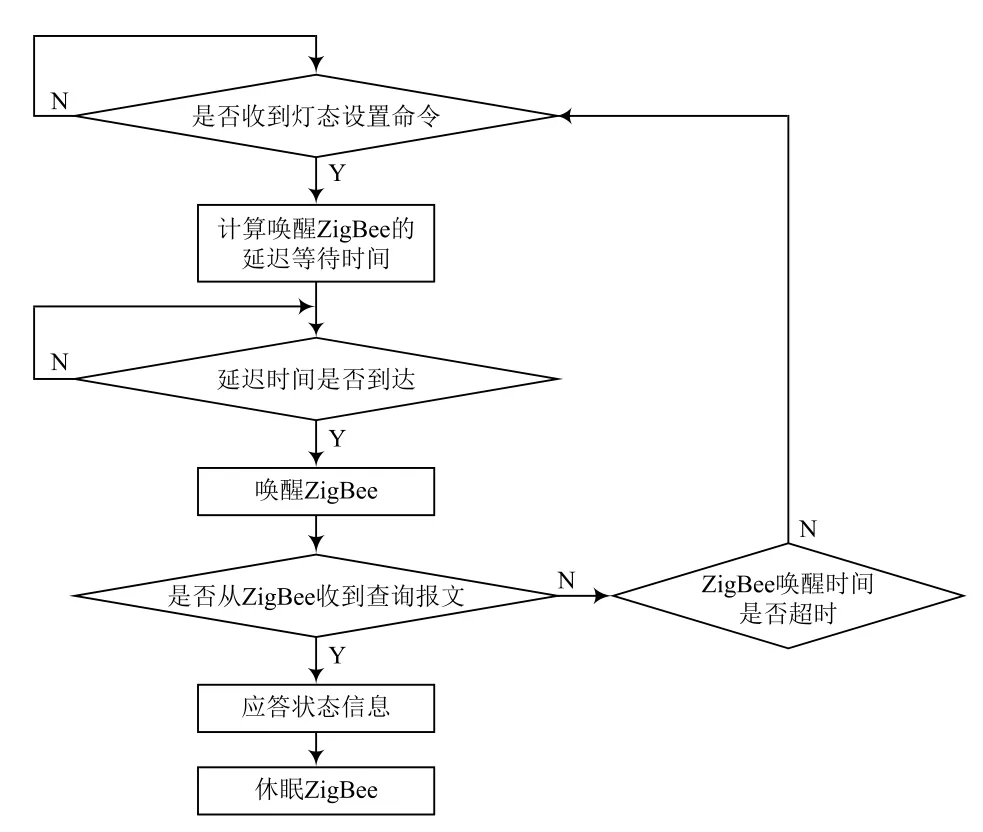
图11 信标状态信息查询流程
设信标唤醒ZigBee的延迟等待时间为,车辆行驶速度为,车辆下发LoRa命令时距离目标组第一个信标的距离为,则有:=/(系数为实际测试的经验值,0<<1,本项目=0.73)。
6.2 车载网关嵌入式软件流程
车载网关嵌入式软件流程如图12所示。
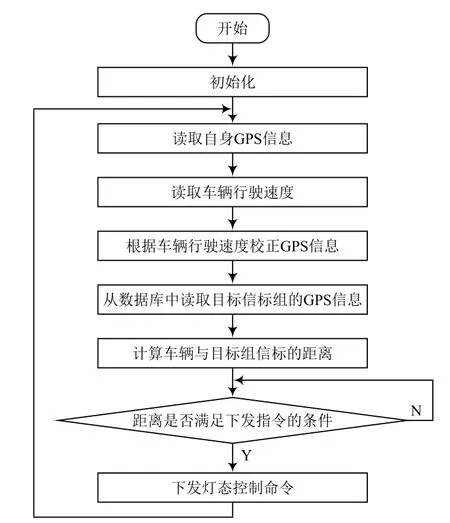
图12 车载网关嵌入式软件流程
6.3 后台软件设计
后台软件采用C#语言设计,分为数据交换层和应用层。与车载网关通过4G网络进行通信,软件在服务器模式下工作。具有以下功能:
(1)按道路、分路段、实时显示区域内所有车载网关和路面信标的状态。监视数据刷新显示时间≤100 ms。
(2)车载网关或信标设备异常时,提示故障信息,报警显示。报警信息响应时间≤100 ms。控制软件界面如图13所示。
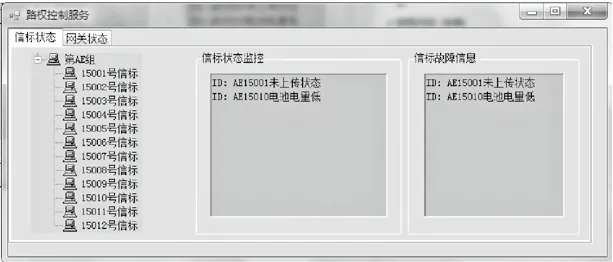
图13 控制软件显示界面
7 结 语
系统基于嵌入式技术,创新性地结合LoRa和ZigBee双模通信机制,实现了上行和下行数据传输的分离,保证了通信可靠性。以此提升公交专用车道的利用率。在当下城市交通越发拥挤的情况下,本项目具有积极的探索意义。
猜你喜欢
计算机测量与控制(2021年8期)2021-08-23
载人航天(2019年1期)2019-03-07
铁道通信信号(2018年3期)2018-04-19
电子器件(2015年5期)2015-12-29
长春理工大学学报(自然科学版)(2015年4期)2015-12-07
太阳能(2015年7期)2015-04-12
水道港口(2015年1期)2015-02-06
航天器工程(2014年5期)2014-03-11
组合机床与自动化加工技术(2014年9期)2014-03-01
河南科技(2014年18期)2014-02-27