
一种针对电力设备的绝缘智能仿生式快速清除鸟巢装置
2022-01-18 09:58:18姚绮明袁富云
大科技 2022年4期
姚绮明,袁富云
(广东电网有限责任公司江门供电局,广东 江门 529000)
1 结构原理介绍
本装置整体结构主要可分为8 个部分,其结构图如图1 所示。
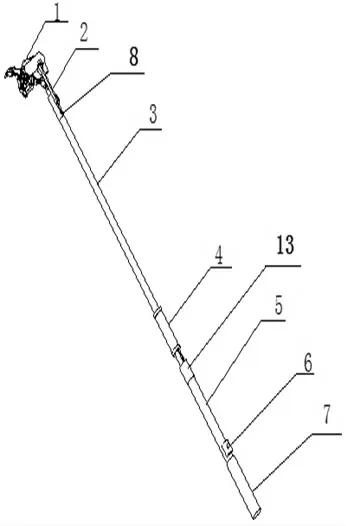
图1 鸟巢清除装置整体结构
(1)仿生机械手,仿照人手结构及五指伸缩握抓功能进行设计,能充分提升清障的灵活性。
(2)电池组,通过简单电路原理为仿生机械手的伸缩握抓动作提供动力的电源。
(3)拉伸连杆,拉伸连杆套于上绝缘杆内部,通过拉伸控制手柄控制仿生机械手向前摆动,拉伸连杆顶端作为仿生机械手的“腕关节”,可根据鸟巢的位置及结构调整“腕关节”摆动倾斜角度,提高每一次清除动作的精确性。
(4)上绝缘杆,作为装置本体外壳,具备绝缘保护功能,上端连接仿生机械手,内套拉伸连杆,下端连接转向轴承。
(5)拉伸控制手柄,套于上绝缘杆底部,主要具备两个功能,上下推拉可控制拉伸连杆顶部的“腕关节”,旋转可控制上绝缘杆及以上部分实现360°转向,以适应不同位置及结构的“鸟巢”,不需要电力人员对整个装置进行角度调整,规避因人手调整一整个装置角度操作过程中的不安全行为[1]。
(6)转向轴承,作为上绝缘杆与下绝缘杆的分界点,承担上绝缘杆及以上部位的旋转功能,实现仿生机械手360°无死角旋转。
(7)遥控开关,通过简单电路控制仿生机械手的伸缩握抓动作。
(8)手柄,位于装置底端,与下绝缘杆一体连接,由于本装置设计了转向轴承,因此,电力人员持手持本装置时,持手柄处的手无须做任何调节,只需固定好本装置即可。
实施流程概要:
如图2 所示,控制开关6 控制电路的连通,当按下控制开关6 电路导通,电源15 给驱动电机16 提供电力,驱动电机16 通过输出轴上的主动齿轮21 转动,主动齿轮21 带动夹爪1 上的从动齿轮22 转动,从动齿轮22 在转动的过程中带动手指18 实现握抓,在本实施例中,手指18 设置为五个,通过每个驱动电机16独立驱动每个手指18 的转动可以使本装置对鸟巢进行握抓清除,同时该开关6 位于操作手柄5 上,方便操作人员的操作。

图2 鸟巢清除装置的电路
2 实施过程详述
如图3 所示,当驱动电机16 转动时,会带动安装在驱动电机16 输出轴上的主动齿轮21 转动,主动齿轮21 带动与手指18 上的从动齿轮22 转动,进而带动手指18 握抓,从而实现对鸟巢的清除;图3 中,手掌1 的摆放位置平行于水平面,驱动电机16 安装在手掌17 上,主动齿轮21 安装在驱动电机16 的输出轴上,且从动齿轮22 安装在手掌1 上并与手掌1 通过转轴转动连接,在驱动电机16 的作用下,主动齿轮21 带动从动齿轮22 转动,从动齿轮22 在转动时带动手指18 垂直于水平面转动,多个手指18 在驱动电机16 的带动下,手指18 可以握住鸟巢。如图3所示,手指18 具有一折弯部,手指18 与手掌1 相连的一端为从动齿轮22。
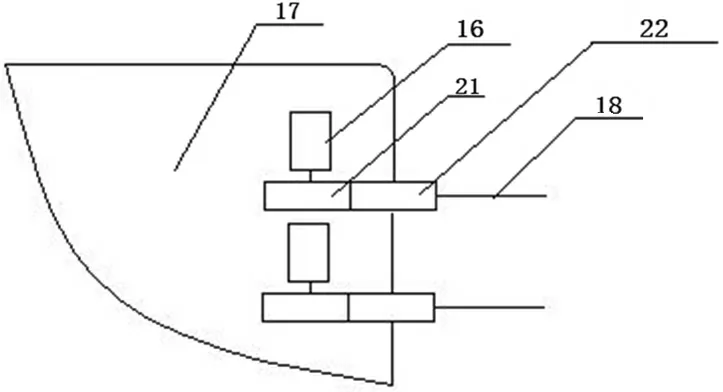
图3 鸟巢清除装置中夹爪构的结构原理
其中,绝缘杆3 为空心管结构;绝缘杆3 一端的周面上设置有第一滑槽结构8,另一端的周面上设置有第二滑槽结构9;拉伸连杆结构2 设于该空心管结构中,拉伸连杆结构2 的一端安装在第一滑槽结构8 中,拉伸连杆结构2 的另一端安装在第二滑槽结构9 中。在本实施例中,通过第一滑槽结构8 与第二滑槽结构9 的设计,可以方便拉伸连杆的运动。
拉伸连杆结构2 包括第一连杆11 和第二连杆12,第一连杆11 的一端与套筒4 相连接,另一端与第二连杆12 的一端相连接,第二连杆12 远离第一连杆11 的一端与夹爪1 相连接。在本实施例中,第二连杆12 与夹爪1 固定连接,这样方便了操作人员控制夹爪1 的转动。
第一连杆11 与套筒4 连接的一端位于第二滑槽结构9 中,第一连杆11 与第二连杆12 相连接的一端位于第一滑槽结构8中。在本实施例中,通过第一连杆11 的两端分别位于第一滑槽结构8、第二滑槽结构9 中的设计,可以限制套筒4 和连杆结构在空心管结构中轴向运动的行程,这样可以使夹爪1 在合理范围内绕绝缘杆3 转动。
第一连杆11 位于空心管结构中,第二连杆12 位于绝缘杆3的外部。在本实施例中,第一连杆11 位于空心管结构中可以避免第一连杆11 在外界环境中受到破坏,同时通过第二连杆12位于绝缘杆3 外部与夹爪1 的上表面相连接的设计,使操作人员在握住套筒4 带动连杆结构在空心管轴向的运动时更容易推动夹爪1 绕绝缘杆3 转动。
夹爪1 包括与绝缘杆3 相铰接的手掌17 以及若干手指18,手指18 的一端与手掌17 相连,驱动装置设在手掌17 上并驱动手指18 与手掌17 转动连接。在本实施例中,通过若干手指18在手掌17 一端,另一个手指18 在另一端的设计可以使夹爪1对鸟巢的握抓更稳定,每个手指18 设置有两个指关节,通过两个指关节成一定弧度相连接的设计,这样可以方便夹爪1 抓取不同形状鸟巢的坚固部分。
手指18 与手掌17 相连接的一端设置有从动齿轮22,驱动装置包括设于手掌17 中的若干驱动电机16、设于驱动电机16输出轴上的主动齿轮21 以及电源15,主动齿轮21 与从动齿轮22 相啮合,电源15 与驱动电机16 电连接。在本实施例中,驱动电机16 由电池组10 或其他装置提供电力,通过齿轮啮合连接的设计方便使驱动电机16 的旋转带动手指18 的握抓。
操作手柄5 上设置有用于控制驱动电机16 启动的控制开关6,控制开关6 与驱动电机16 电连接。在实施例中,将控制开关6设置在操作手柄5 上方便操作人员控制驱动电机16 对夹爪1的握抓,进而对鸟巢进行清除,操作手柄5 上还设置有绝缘手柄7,这样进一步保证了该装置的绝缘性。
绝缘杆3 远离夹爪1 一端设置有轴承13,绝缘杆3 与轴承13 的内圈固定相连接,轴承13 的外圈固定连接有操作手柄5。在本实施例中,这样可以使操作人员一只手只需拿着操作手柄5,另一只手对套筒4 进行旋转或上下移动的操作,或者将操作手柄5 放置在地上或固定在其他设备上,操作人员只需手持套筒4 进行上下移动或转动就可以完成对夹爪1 的位置要求,节省了操作人员的操作难度与体力。
套筒4 内表面设置有凹槽结构19,绝缘杆3 周面上设置有连接键20,连接键20 安装在凹槽结构19 中,凹槽结构19 沿绝缘杆3 轴向的开口长度大于连接键20 沿绝缘杆3 轴向的长度。在本实施例中,凹槽结构19 与连接键20 的设计可以让套筒4带动空心管结构旋转,这样可以方便操作人员对不同方位的鸟巢进行抓取,通过凹槽结构19 沿绝缘杆3 轴向开口长度大于连接键20 沿绝缘杆3 轴向的长度的设计进一步限制拉伸连杆结构2 在合理范围内带动夹爪1 绕绝缘杆3 转动。
3 结语
使用本装置可彻底隔离人体与铁塔的接触,电力人员可站于电杆下进行操作,安全距离足够,减少停电作业及绝缘屏蔽的场景,从而简化现场操作流程及相应安全措施。通过遥控开关控制顶端仿生机械手伸缩握抓,通过拉伸控制手柄调节仿生机械手“腕关节”摆动角度,一次性动作即可完全剥离鸟巢。同时,可根据鸟巢尺寸置换仿生机械手尺寸,以提高清理工作的精准程度。本装置可通过拉伸控制手柄调整仿生机械手方向,实现360°无死角转换,对不同方位的鸟巢进行快速清理,大大提高清理工作的灵活程度。
猜你喜欢
科技与创新(2021年15期)2021-11-28 02:42:43
物流技术与应用(2021年1期)2021-03-22 09:25:38
橡塑技术与装备(2021年2期)2021-02-01 03:36:18
装备制造技术(2020年11期)2021-01-26 00:39:30
装备制造技术(2020年9期)2021-01-26 00:15:14
学苑创造·A版(2020年4期)2020-04-24 09:21:52
小学生学习指导(低年级)(2018年9期)2018-09-26 05:59:30
电子制作(2018年11期)2018-08-04 03:25:44
小星星·阅读100分(高年级)(2018年5期)2018-06-12 08:46:50
科普童话·百科探秘(2015年5期)2015-05-26 07:10:33
