光纤时频传递链路光程补偿控制方法研究
2022-01-18 08:29肖庆雯杨宏雷张升康
宇航计测技术 2021年5期
肖庆雯 杨宏雷 胡 钢 赵 环 张升康 葛 军
(1.计量与校准技术重点实验室,北京无线电计量测试研究所,北京 100039;2.电子科技大学 信息与通信工程学院,四川成都 611731)
1 引 言
高精度时间频率传递在时间频率计量、导航定位、前沿科学探索等领域发挥着重要作用[1-4]。时间频率传递已往采用卫星无线电传递方式,同步精度为纳秒到皮秒量级[5,6]。随着光学原子钟技术的不断发展,其稳定度已达到10-18量级[7,8]。然而,基于无线卫星链路的传递方式难以完全满足这类新型高精度、高稳定度时频基准的传递要求。鉴于近几十年来光纤通信网络基础设施的大规模建设,以及光纤低损耗、抗干扰能力强的特性,利用商用光纤传输网络进行光学时频基准远程传递将是未来时频传递主要技术手段[9-12]。
目前,光纤时频传递技术主要有三种实现方式:光载射频时频传递[2]、光频信号时频传递[9,10]以及光梳信号时频传递[4,13]。光载射频传递技术以传输的时频信号作为调制信号,对连续激光载波进行调制,可满足铯原子钟、氢原子钟等低成本频率基准传递要求;光频信号时频传递通过光纤直接传递光学频率信号,主要用于光学原子钟的高精度比对;光梳信号时频传递技术以飞秒光梳信号作为传递信号,光梳信号在时频域内具有等间隔特性,可以锁定在微波频率标准或光学频率标准上[14],成为了X射线自由电子激光器等[4]国家大科学装置中的主要时频传递手段。
光学时频信号在光纤链路中不可避免地会叠加环境引入的相位抖动噪声,为保证时频传递稳定度,须要对其进行精密的补偿控制。光纤时频传递通常采用往返传输鉴相补偿方案,通过对比远端回传信号与本地参考信号的相位,提取二者的相位误差信息,利用光学信号相位共轭补偿方式或光程主动控制方式对光纤链路的相位抖动噪声进行补偿。这两种控制方式均建立在光纤链路噪声变化相对光学信号传递过程可忽略不计的前提下。在光学信号相位共轭补偿方案中,本地信号与回传信号混频后获得光纤链路噪声的相位共轭补偿信号,并将其施加于传递光学信号,完成相位抖动噪声预补偿;在传输过程中,光学信号叠加光纤链路相位噪声后,从而使传递至远端的光学时频信号与本地端达到相位同步。由于频率信号调频或调相可以很容易实现,此方法主要应用于光纤链路激光频率相干传递,并且获得了显著的进展[11,12]。在光程主动控制方案中,反馈控制作用于光纤链路光程,通过实时改变光纤链路长度,达到减弱光纤链路相位噪声影响的目的。这种方案被广泛应用于时间信号传递领域,主要是由于在传递时间信号时,本地光学时钟信号须要保持精密稳定,采用类似上述改变时间信号相位的方式是不可行的。随着各种应用场景对时间信号同步精度要求的不断提高,时间信号精密传递相关的技术有待进一步发展和完善。
2 光纤时频传递与延迟补偿理论
2.1 往返传输补偿原理
实验基于光程控制的延迟补偿方法,原理如图1所示。本地光学时钟信号经过延迟线、光纤链路传递至远端,再由远端反射回本地。被反射的信号受光纤链路影响产生相位抖动,并与本地时钟参考同时输入至鉴相器内进行相位误差探测。反馈控制模块根据相位误差信号进行负反馈运算,输出驱动信号实时反馈控制延迟线。
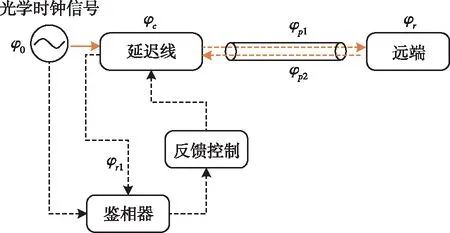
图1 时频信号往返传输补偿原理框图
主动补偿控制过程中的信号相位关系分析如下[15]:设光学时钟信号的初相位为φ0,延迟线的相位补偿量为φc,往返传输时光纤链路引入的相位抖动分别为φp1和φp2,则远端接收信号的相位φr为
φr=φ0+φc+φp1
(1)
由于光纤中光信号的传播速度远远大于光纤引入的相位抖动的速度,因此可以认为光纤在往返传输时所引入相同的相位抖动,即φp1=φp2=φp。
到达本地的反射信号相位φr1为
φr1=φ0+2(φc+φp)
(2)
鉴相器对比光学时钟信号与回传信号的相位,提取的相位差Δφ表示为
Δφ=φr1-φ0=2(φc+φp)
(3)
因此,得到鉴相器的补偿条件为
φc+φp=0
(4)
反馈控制模块根据上述补偿条件,实时改变延迟线的相位补偿量φc,减小光学时钟信号与回传信号的相位差,实现链路延迟实时补偿。
2.2 光纤链路相位噪声理论分析
光学时钟信号在光纤中传输时的相位与其经过的光程有关,可表示为
(5)
式中:L——光纤长度;n——光纤折射率;c——光速;ν——传输频率。
造成相位抖动的主要原因是温度影响下光纤长度及折射率改变所导致的相位变化。用式(5)对温度T求导,得到相位抖动表达式为
(6)
其中,第一项为光纤长度变化产生的相位抖动,dL/dT为光纤热膨胀系数。第二项为光纤折射率变化产生的相位抖动。由于光纤折射率受温度的影响相对较小,相较第一项可忽略。因此,大体上可通过改变光纤传输路径长度,进而改变所经光程,以实现链路中相位抖动的综合补偿。
3 基于光程控制的延迟补偿方法
依据上述补偿原理,在实验室条件下,利用~11km的光纤盘进行光纤链路光程控制延迟补偿实验,实验系统如图2所示。系统分为本地时钟参考锁定及光纤链路延迟补偿两部分。在本地时钟参考锁定部分中,锁模激光器输出两路中心波长为1 550nm,重复频率为250MHz的飞秒激光脉冲。其中,一路飞秒激光脉冲将作为参考信号用于本地时钟参考锁定,另一路作为传递信号,用于完成时频信号的远程传递。飞秒激光脉冲直接入射至本地光学-微波鉴相器1,同时,本地时钟参考输出7.5GHz微波信号至光学-微波鉴相器1的微波调制端口。鉴相器1根据飞秒激光脉冲与微波信号之间的相位差[13],输出误差电压信号至伺服控制器1。伺服控制器1对输入的误差电压信号进行比例、积分和微分运算,输出反馈控制电压信号至锁模激光器以调节飞秒激光脉冲的重复频率。
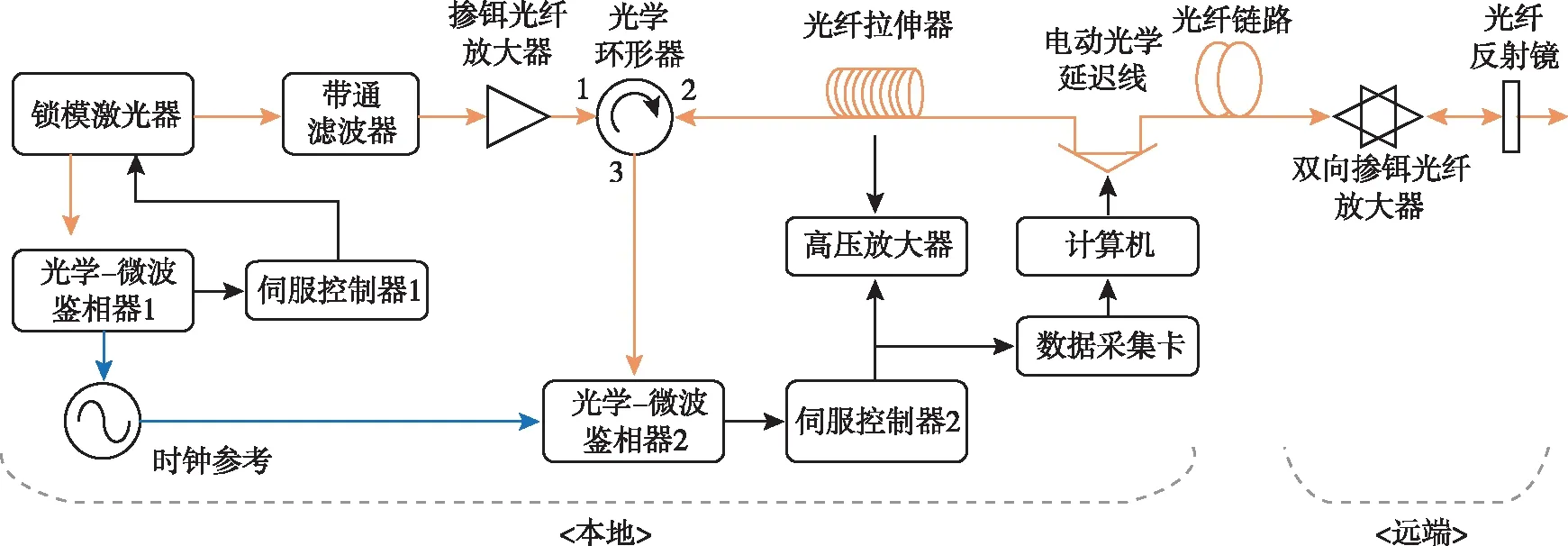
图2 基于光程控制的延迟补偿系统框图
在光纤链路延迟补偿中,飞秒激光脉冲先经过一个带宽为0.8nm的光纤带通滤波器,通过限制脉冲激光光谱带宽,减弱长距离光纤色散特性引入的飞秒脉冲展宽效应,可保证后端光学-微波鉴相器2的鉴相精度。随后窄带激光脉冲经过掺铒光纤放大器,使得激光脉冲获得功率放大。功率放大后的激光脉冲依次经过光学环形器、压电式光纤拉伸器、电动光学延迟线进入长距离光纤链路中。在实验中,为进一步减小光纤色散特性对窄带激光脉冲的时域展宽效应,长距离光纤链路采用~10km单模光纤串联~1 100m色散补偿光纤配置,大体完成色散补偿。在远端,窄带脉冲激光经双向掺铒光纤放大器完成功率补偿后,输入至光纤反射镜,其中,90%的窄带脉冲激光透射后作为远端激光复现信号;剩余10%的激光被反射,经光纤链路回传至本地端。回传窄带激光信号经光学环形器送入光学-微波鉴相器2。由于激光信号经光纤链路往返传输后,受链路噪声影响产生了脉冲时域相位抖动。光学-微波鉴相器2将回传激光信号与本地时钟参考信号进行鉴相,获得二者的相位误差。伺服控制器2根据误差电压信号进行比例、积分和微分运算,输出反馈控制电压信号。此信号被分为两路,一路经高压放大器驱动压电式光纤拉伸器,完成光纤链路长度的快速反馈;另一路输入至数据采集卡,采集到的电压数据上传至计算机。计算机通过LabVIEW软件控制平台调节电动光学延迟线。通过上述压电式光纤拉伸快速反馈及电动光学延迟线慢反馈复合控制方式,不仅可以实现光纤链路相位噪声的快速抑制,而且可以保证光纤链路长度的长期稳定,增强系统的鲁棒性。
基于LabVIEW的电动光学延迟线控制程序如图3所示。程序实现功能可分为模块初始化与实时控制循环。模块初始化在每次光学延迟线启动时,用于延迟线绝对补偿量清零。由于延迟线最大可调延迟量为560ps,将相对延迟位置设置为280ps处,使延迟范围在正负方向上保持相等,可提升系统应对延迟冲击的能力,并最大限度的利用延迟调节范围。在实时控制循环中,采用LabVIEW DAQ方式对伺服控制器2的输出电压信号进行实时离散化采集。采样位数为16位,采样率为10kS/s。通过判断电压均值所处设定的电压范围,判别电动光学延迟线的调整方向。由于伺服控制器2的输出电压处于(-5~+5)V之间,程序中设定电压范围(-5~-2.5)V和(+2.5~+5)V,电动光学延迟线的延迟调整方向相反。电压范围(-2.5~+2.5)V对应电动光学延迟线保持不变。随后,根据电动光学延迟线的控制指令格式,利用LabVIEW VISA功能库,通过计算机RS232串口将调整控制命令下发至电动光学延迟线的驱动器,电动光学延迟线的延迟调节分辨率可达0.001ps。在执行链路延迟补偿循环的同时,对数据采集卡采集的电平峰峰值进行监控,通过监测控制电压状态变化,判断整个系统运行状态。
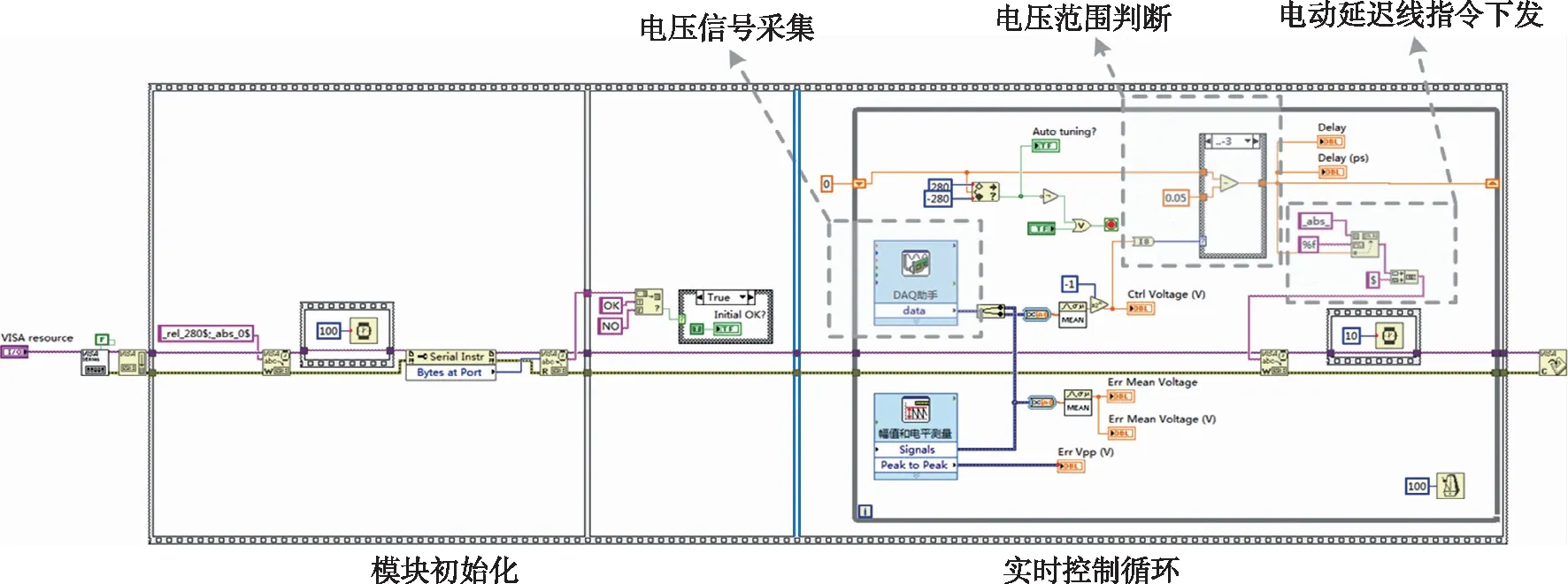
图3 光纤链路光程控制LabVIEW控制程序图
4 实验测试
光纤链路光程延迟补偿系统性能测试如图4所示。在2.5h内,误差信号电压平均值始终保持在0V附近,证明光纤链路延迟量变化被实时控制补偿。时间延迟补偿通过电动光学延迟线的主动调节来完成,通过补偿量往复变化曲线可反映出光纤链路所处环境的温度变化。通过调节电动延迟线,标定出误差电压变化与时延变化的线性关系,以此利用锁定后的误差电压值计算出时延变化,再对时延变化量作稳定度分析。在11km光纤时频传递链路中,环内时间延迟补偿稳定度达到1.55fs/s与0.12fs/1 000s,频率稳定度达到3.06×10-15/s与1.99×10-19/1 000s,如图5所示。

图4 光程延迟补偿系统实时控制测试结果图
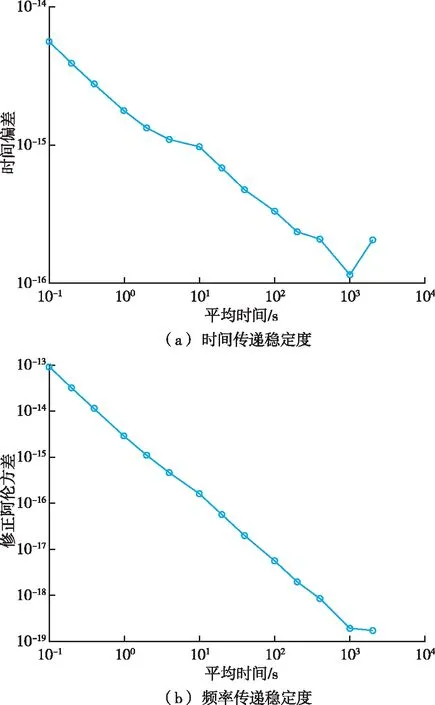
图5 时延补偿系统环内稳定度测试结果图
5 结束语
本文设计实现了基于光程控制延迟补偿原理的光纤链路飞秒激光时频传递延迟补偿系统。采用光纤环路光学-微波鉴相器,提取经往复传播的飞秒激光脉冲与本地微波信号源的相位误差,有效避免了直接光电转换探测引入的附加光电噪声,提高了相位误差探测精度;并以此相位误差信号为输入信号,在LabVIEW环境下控制链路中的电动光学延迟线,对光纤链路延迟抖动进行自动实时补偿。11km光纤时频传递链路实验结果表明,环内时间延迟补偿稳定度达到1.55fs/s,0.12fs/1 000s,频率稳定度达到3.06×10-15/s,1.99×10-19/1 000s。
猜你喜欢
火力与指挥控制(2022年8期)2022-09-16
初中生学习指导·中考版(2022年4期)2022-05-12
移动通信(2021年5期)2021-10-25
中学生数理化(高中版.高考理化)(2021年5期)2021-07-16
科学导报(2021年7期)2021-02-22
科技创新导报(2016年27期)2017-03-14
晚晴(2016年11期)2016-12-20
中学生数理化·中考版(2016年2期)2016-09-10
哈尔滨理工大学学报(2014年3期)2015-01-04
数理化学习·高三版(2009年2期)2009-04-03