
无人机H2/H∞混合跟踪控制器设计
2022-01-17 09:34:50方永锋周和盛
自动化仪表 2021年10期
方永锋,周和盛,孙 鼎,周 彬
(广东威恒输变电工程有限公司,广东 佛山 528000)
0 引言
无人机(unmaned aerial vehicle,UAV)因其安全、方便以及高效的特点,在电力巡检中得到了广泛的应用,近年来在主网电力巡线、电力塔精巡等领域都有成功的应用案例[1]。无人机在巡检过程中需要和电力线、塔保持一定的安全距离,并时刻调整飞机姿态使得相机对准关键部件采集照片。这对无人机的航线跟踪性能提出了相当高的要求。同时,在飞行作业过程中,外界强风扰动以及无人机自身震动也都在破坏巡检的质量,因此需要无人机飞控具有强大的抗扰性能。
针对无人机的稳定和轨迹跟踪问题,国内外大量学者设计了不同的控制器。根据各方法的机理及其衍生关系,常用控制器可分为线性控制器、非线性控制器、鲁棒线性/非线性控制器和自适应控制器等。常用线性控制模型包括比例积分微分(proportional integral differential,PID)控制器[2]、基于鲁棒线性矩阵不等式(linear matrix inequality,LMI)的PID[3]和线性H∞[4]。常用的非线性器包括滑模控制[5-6]、非线性H∞[7]等。许多学者对鲁棒控制器进行了研究,并提出各类衍生控制器。此外,也有学者将多种方法结合提出新的控制器,如模糊自适应控制器[8]、模糊虚拟力[9]和模糊自适应滑膜[10]。由于无人机在飞行作业过程中数学模型具有非线性和不稳定的动力学特性,使得无人机对环境非常敏感。
为了使鲁棒控制器同时具备抗噪声和抗干扰能力,本文根据电力巡检中的实际需要,提出了采用H2/H∞混合跟踪控制器来控制电力巡检过程中无人机的姿态和高度,实现对测量噪声和外部干扰的鲁棒性和抗干扰性。本研究通过对比试验,证明该控制器对于无人机控制性能的提升作用,在有近塔精巡等较高要求的电力巡检领域有相当高的应用价值。
1 动力学模型
本节将介绍无人机速度、姿态和位置的动力学微分方程,并以此来定义无人机的动力学模型。假定巡检无人机有六个自由度的运动,即可实现x、y和z方向上的三个线性位置平移;同时,可实现围绕x、y和z的三个方向旋转,分别称为滚转(φ)、俯仰(θ)和偏航(Ψ)。
一般情况下,无人机的动力学模型[11]可用六个二阶微分方程来描述,具体定义如下。
(1)
(2)
式中:U1、U2、U3、U4为控制指令;Ωi为角加速度;Ix、Iy、Iz分别为绕x、y、z轴的惯性常数;m为无人机的质量;L为力矩长度;g为重力加速度;b为信任系数。
由于本文的目的是设计一个控制器来跟踪无人机姿态和高度轨迹,为简化模型,本文规定无人机模型简化如下。
(3)

(4)
H2/H∞混合跟踪控制器是用线性方法设计的,因此需要以线性状态空间表示。本文采用雅可比方法,令系统平衡点为:
Xeq=[0 0 0 0 0 0 0 0]T
(5)
在平衡点附近对系统的动态模型进行线性化处理。因此,系统的状态空间为线性,表示为:

(6)
式中:A、B为线性系统的状态常量。
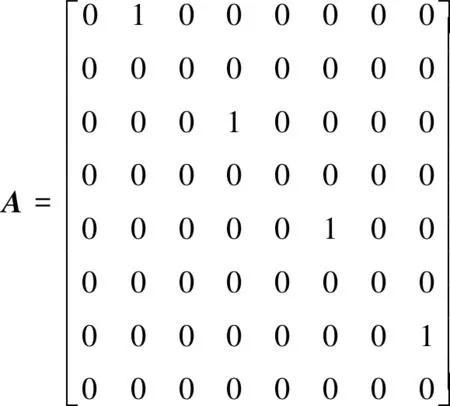
(7)
(8)
2 控制器设计
本文设计的控制器是采用LMI方法设计的鲁棒线性静态状态反馈控制器。该控制器由两个著名的鲁棒控制器H2和H∞混合组成。H2控制器[12]对小变化控制信号的测量噪声具有鲁棒性。H∞控制器[13]对大变化控制信号的外部干扰和模型不确定性具有鲁棒性。因此,利用两种控制器的组合可以得到一个性能更高、鲁棒更强的控制器。它对测量噪声、模型不确定性和低变化控制信号的外部干扰均具有鲁棒性。同时,本文在H2和H∞约束的基础上增加了区域极点配置约束,以改善闭环系统的时域响应,如闭环响应的稳定时间、最大超调和最大频率等。
2.1 混合控制器
LMI方法的鲁棒控制器可描述为:
(9)
式中:X为状态向量;U和W分别为控制信号和外部干扰,外部干扰可能包括测量噪声、外部干扰和模型不确定性;Z∞为从W到输出的传递函数无穷范数且为H∞控制器有界的输出;Z2为从W到输出的传递函数的2范数且为H2控制器有界的输出;D11、D12、D22为零阶矩阵;C1、C2为权重矩阵。
令系统中状态反馈控制信号为U=KX。其中,K为一个任意的常数矩阵。根据式(9),闭环系统模型定义为:
(10)
当且仅当矩阵不等式(11)可行时,式(10)中的矩阵A+B2K将是Hurwitz稳定,即系统是稳定的;同时,从扰动输入W到Z2的一阶范数传递函数的无穷范数将小于任意极小数γ。
(11)
式中:Pcl为对称矩阵;I为具有适当大小的单位矩阵;γ>0可确保H∞的性能。需注意,矩阵<0表示矩阵为负定,矩阵>0表示矩阵为正定。
2.2 混合跟踪控制器
前文已经介绍了H2/H∞混合控制器的标准形式。本节将介绍采用积分控制方法将该混合控制器改进为跟踪控制器。
根据式(9),具有不确定性和干扰下的混合H2/H∞跟踪控制器的系统模型定义为:
(12)

3 仿真分析
本节采用了非线性数值在MATLAB/Simulink环境对无人机飞行进行模拟。该模拟器主要由飞机、发动机、执行器和伺服系统、传感器和仪表着陆系统、环境和飞行控制系统5部分组成。根据跟踪控制器结构和式(12),仿真过程控制器的系统模型计算如下。
(13)

(14)

(15)
(16)
(17)
Z∞=(eφeθeΨez)T
(18)
Z2=[XU]T
(19)
Y=[φθΨz]T
(20)
式中:A和B为线性系统的状态常量,由式(7)、式(8)求得;W为空气的水平和垂直扰动高斯白噪声,且两个方向的最大速度为7 m/s和2 m/s;eφ、eθ、eΨ、ez为仿真过程误差。
仿真过程中的试验参数选取如表1所示。

表1 试验参数选取Tab.1 Selection of experimental parameters
为进一步验证算法性能,将本文所设计的控制器和PID控制器[14]的仿真结果进行比较和分析。图1为期望和实际轨迹对比结果。

图1 期望和实际轨迹对比结果Fig.1 Comparison results of desired and actual trajectories
图2为两种控制器下的高度跟踪误差对比结果。

图2 高度跟踪误差对比结果Fig.2 Comparison results of height tracking error
由图2可以看出,本文所设计的H2/H∞混合跟踪控制器在水平飞行时的最大高度跟踪误差小于3.3 m,且本文所设计控制器的误差曲线更加平缓,PID控制器的跟踪误差曲线呈剧烈抖动,且最大高度跟踪误差更大。
4 结论
本文对无人机电力塔巡检作业过程中的稳定性和轨迹跟踪问题进行研究,提出了采用H2/H∞混合跟踪控制器来控制电力巡检过程中无人机的姿态和高度。将本文所设计控制器与传统PID控制器的高度跟踪误差进行对比,结果进一步验证了本文所设计控制器的有效性及实用性。
本文所设计控制器在仿真时假定指令的执行无延时,然而在实际飞行任务中受软、硬件制约,必然存在时延、干扰等问题。未来研究方向为:一方面,可研究具有时延的轨迹跟踪问题;另一方面,可将控制器写入硬件,完成实物论证。
猜你喜欢
数学物理学报(2022年4期)2022-08-22 04:08:00
中学生数理化·高一版(2021年2期)2021-03-19 08:32:06
数学年刊A辑(中文版)(2020年3期)2020-10-27 02:44:16
自动化学报(2019年6期)2019-07-23 01:18:22
中央民族大学学报(自然科学版)(2018年3期)2018-11-09 01:16:34
中学生数理化·八年级物理人教版(2017年9期)2017-12-20 08:11:30
厦门理工学院学报(2016年1期)2016-12-01 04:50:41
北京航空航天大学学报(2016年7期)2016-11-16 01:51:01
系统工程与电子技术(2016年4期)2016-08-24 07:46:18
噪声与振动控制(2015年4期)2015-01-01 07:08:05
