
基于ZigBee的高空垃圾处理机器人设计
2022-01-17 08:28郑金和
自动化仪表 2021年11期
周 慧,郑金和,赵 倩
(曲阜师范大学工学院,山东 日照 276826)
0 引言
目前,我国旅游产业发展迅猛。随着景区客流量的大幅度上升,垃圾处理问题亟待解决,尤其是高山高空区域。然而,景区的垃圾处理手段却停滞不前,仍以人工捡拾为主。对于高山崎岖地区,这种方式不仅效率低下而且存在很大的安全隐患。为了解决这一问题,本文设计了一款基于ZigBee的可组网高空垃圾处理机器人。该机器人可以进行垃圾的精准定位和快速抓取,并具备远程监控、无线传输和多机控制等功能,实现了高空垃圾捡拾的智能化。由于ZigBee技术具有安全、可靠、成本低等特点[1],该机器人灵活轻便、高效节能,提高了高空垃圾捡拾的效率,大大节约了人工成本。
1 系统总体论证
系统主要由ZigBee无线网络系统和控制终端两部分组成,两者之间通过RS-232串行总线进行通信。系统结构如图1所示。图1中,ZigBee无线网络系统由传感器、终端节点、路由器和协调器构成[2]。OpenMV摄像头和GPS导航系统分别进行图像信息和位置数据的采集[3]。路由器作为中继节点,实现数据从终端节点到协调器的传输。协调器将这些数据传送至控制端处理。机器人根据处理后的信息,控制机械臂进行自动捡拾。机器人以四旋翼飞行器为搭载平台,由智能捡拾装置、垃圾存储装置、图像识别装置、太阳能电池板和动力电源供电装置、无线通信等模块组装而成。控制终端以TM4C123GH6PM为控制核心,通过无线通信模块实现摇杆、上位机或手机APP的远程控制。此外,利用ZigBee的终端节点将多台机器人联合组网,使多个终端节点能同时采集数据并将数据传至控制端。通过GPRS移动通信网络,客户端可以使用手机APP对多台机器人的工作进行监控,同时可以发送控制指令到协调器,使其作出相应处理。

图1 系统结构框图Fig.1 System structure block diagram
2 系统的具体设计
系统主要包括智能捡拾、远程控制和无线传输等功能。系统操作流程如图2所示。
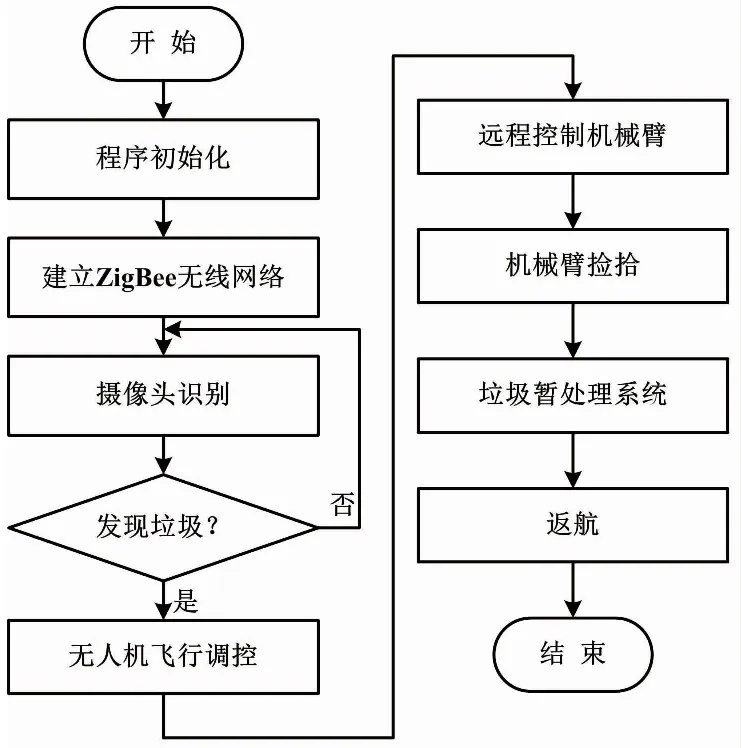
图2 系统操作流程图Fig.2 System operation flowchart
2.1 机器人机械结构的设计
为解决普通四旋翼飞行器左右两侧的存储箱因重力差异而导致的飞行失稳问题,该机器人在飞行器旋翼连接机身处设置四个水平仪与陀螺仪。
TM4C123GH6PM经姿态解算获得俯仰角和横滚角,水平仪和陀螺仪的搭配使用可确保飞行姿态的完整[4]。采用舵机传动机构控制垃圾存储装置的开闭。当机械臂携带垃圾回收时,舵机控制垃圾存储装置开启,放回时关闭。这样不仅可以实现垃圾的暂时储存,还能避免因恶劣天气导致的垃圾泄漏问题。
机械臂的手部设计为360°旋转式仿生活动关节,腕部设计为180°转动式关节,底部可进行360°旋转,实现全方位抓取。同时,分别采用上、下移动式机械爪和开合式机械手臂提高机械咬合力和抓取效率。飞行器和机械臂采用组合方式进行组装,方便拆卸。在不同的应用领域,可以设计不同结构和功能的机械臂完成相应工作。整个系统采用太阳能和常规动力电源进行联合供电。其中:太阳能电池板通过支架安装于飞行器上方;动力电源安装在飞行器控制主板的底部。两者通过充电装置相连,大大提高了机器人的续航能力。
2.2 机器人承载分析
螺旋桨拉力是飞行器的重要指标之一,也是评估升阻特性的基础[5]。在四旋翼飞行器的四个方向上分别安装螺旋桨,由电机旋转提供动力。由于垃圾捡拾及存储装置的存在增大了飞行器起飞和定点悬停的难度,为了保持飞行器的平稳,安装了由陀螺仪和三轴加速度传感器组成的惯性导航模块,并通过卡尔曼滤波算法实现GPS 定位下的目标点悬停[6]。同时,考虑到装置的重量,针对飞行器的重量承载问题进行了承载能力评估。
螺旋桨拉力计算公式如式(1)所示[7]:
F=Dlbn2Pk
(1)
式中:F为螺旋桨拉力;D为直径;l为螺距;b为桨宽;n为转速;P为1个标准大气压;k为经验系数。
根据四旋翼飞行器的实际参数(D=25.4 cm、l=11.43 cm、b=3.1 cm、U=10 V、N=4),经计算可得它的拉力为F≈45.156 N。
四个电机总升力的计算公式如式(2)所示:
Fz=NF
(2)
式中:Fz为总升力;N为螺旋桨的叶数。
经估算,最大载重≈4.1 kg。
2.3 ZigBee无线网络设计
该设计采用ZigBee无线通信技术,能够有效实现终端节点、协调器和客户端之间的数据上传与指令下达[8]。协调器是ZigBee网络中进行数据通信的重要枢纽。在此网络中,某一时刻仅允许一个协调器寻找数据传输的通道,并建立一个网络信号以便于启动网络[9]。ZigBee无线网络以一个节点为协调器成网状向四周分布,并采用主从通信模式,通过地址指向实现多节点无线传输。由于节点之间的通信距离有限,该设计将Wi-Fi模块接入路由节点,由终端节点采集的数据通过路由模式实现不同节点和网络之间通信,并寻找出数据传输的最优路径。由于很多电子设备不支持ZigBee协议,主控TM4C123GH6PM通过Wi-Fi模块将ZigBee信号转换成Wi-Fi信号,以实现模块兼容。因此,工作人员可以通过多类型的电子设备,如计算机、平板或手机,实现机器人的远程操控,使高空垃圾捡拾工作方便、高效。
2.4 智能捡拾模块设计
智能捡拾模块主要由OpenMV图像采集、图像处理和运动控制这三个子模块组成。系统通过手机APP或计算机端的监控系统定位目标垃圾,并采用遥感控制飞行器将目标调整至摄像头的视野中心。摄像头采用特征点检测和轮廓检测的方法对目标垃圾进行识别[10]。系统基于OpenMV处理图像并获得二维像素点坐标,通过建立映射模型和升维处理进行坐标转换,获得三维相机坐标,进而利用T变换转换成在世界坐标系下的位置坐标。
通过对机械臂末端执行器运动至目标位置时的姿态进行运动学逆解,主控TM4C123GH6PM可以计算出舵机旋转角度,同时对到达目标位置进行路径规划,找出最优路径。系统以目标垃圾与机械臂末端执行器之间的位置偏差为反馈数据,设计闭环比例积分微分(proportional integral differential,PID)控制回路对机械臂的位置进行自动调节,实现精准抓取。
本设计可以通过多种设备控制机械臂,如手机APP可以利用控制按键实现机械臂遥控和位置校正。当按下舵机控制的按钮时,相应的字符指令会通过Wi-Fi发送到舵机控制板,通过调用相应的方向控制函数,分别实现对机械臂手部、腕部和底部的控制。同时,摄像头将采集的图像信息实时地传送给接收器,使工作人员能通过手机监控画面随时察看垃圾捡拾情况和机器人的工作状态。
2.5 电源模块的设计
电源模块是系统的重要组成部分,由电源输入、电源隔离和电压转化这三个子模块组成[11]。本设计采用太阳能电池板和动力电源作为供电装置。其中,太阳能可以持续供电,确保机器人的续航能力。太阳能供电系统结构如图3所示。
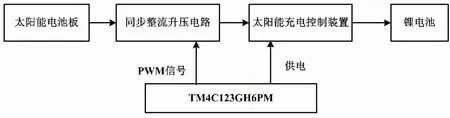
图3 太阳能供电系统结构图Fig.3 Solar power supply system structure diagram
太阳能电池板输出的电压经同步整流升压电路升压,再通过太阳能充电控制装置对锂电池进行充电,并由设计的充电电压检测电路进行断电保护。由于主控及各个模块的工作电压不同,电源模块可以将外接直流电源电压转换成各模块所需的电压。该系统中,主控TM4C123GH6PM采用3.3 V供电,机械臂的舵机采用5 V供电。因此,本文设计了3.3 V和5 V的电源稳压电路。降压电源电路如图4所示。
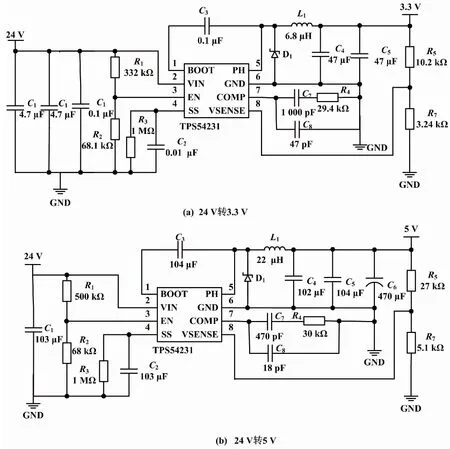
图4 降压电源电路Fig.4 Step-down power supply circuit
降压电路采用TPS54231芯片作为控制芯片,通过稳压三极管和电容等进行降压。TPS54231芯片性能高、功耗低,内部具有斜率补偿的电流模式,大大简化了外部补偿计算。经测试,飞行器上可放置由12片小型电池板串联构成的太阳能电池组件,可提供约6 V电压。
3 创新点
①系统基于ZigBee技术建立无线网络,利用Wi-Fi联网实时上传机器人的工作数据,并根据反馈的数据对机器人的工作计划及路径进行相应的优化调整。同时,工作人员能够通过上位机或手机APP实时观察机器人的运行状况以及垃圾周围环境,实现远程监控。
②系统基于OpenMV,通过特征点检测和轮廓检测的方法对目标垃圾进行准确识别,并设计闭环PID控制回路以实现自动捡拾和垃圾回收。该系统不仅可实现由传统的人工捡拾到智能捡拾的转变,而且能够应对恶劣环境。
③系统具有多机工作模式,不同终端机器人之间相互通信,可实现同一个终端控制多个垃圾处理机器人进行高空作业。多机共同协作能够进行同一区域互不干扰的高效率工作,或不同区域互相配合的大规模作业。
④系统采用太阳能与常规动力电源联合供电,可实现太阳能实时供电,提高航行能力,使垃圾处理更加节能、高效。
4 结论
基于ZigBee无线通信技术,采用四旋翼飞行器设计的一款高空作业机器人,可以实现精准定位、远程控制、智能捡拾、多机控制等功能。该机器人具有小型化、智能化、低功耗、续航时间长等优点,解决了高空垃圾处理存在的高风险和低效率的问题,实现了高空垃圾捡拾和存储的智能一体化。
猜你喜欢
科学大众(2022年23期)2023-01-30
凤凰动漫(军事大王)(2022年1期)2022-04-19
现代装饰(2020年8期)2020-08-24
铁道通信信号(2019年9期)2019-11-25
小哥白尼(趣味科学)(2018年4期)2018-06-21
电子制作(2018年2期)2018-04-18
电子制作(2016年15期)2017-01-15
少儿科学周刊·儿童版(2015年7期)2015-11-24
小朋友·快乐手工(2015年5期)2015-06-06
太阳能(2015年12期)2015-04-12
