基于动态下垂系数的低压微电网无功控制策略
2022-01-12 08:39罗朝旭刘洋罗钦秦建衡
电力建设 2022年1期
罗朝旭,刘洋,罗钦,秦建衡
(1.湖南工业大学电气与信息工程学院,湖南省株洲市 412007;2.电力电子装备与电力电子化电力网络湖南省重点实验室(中南大学),长沙市410083)
0 引 言
随着能源的消耗和环境治理两方面的压力不断增加,人类对能源系统的需求也在不断更新[1]。打破旧能源结构寻求多元化的能源供应问题已经迫在眉睫[2]。微电网结构的主要组成部分有分布式电源、储能装置、变流器、控制设备以及电力负荷[3]。微电网凭借自身优异的控制策略以及有效的能量管理模式,使其可以在孤岛和并网两种模式下稳定运行,并且降低间歇性分布式电源对电网的影响,很大程度上提高了清洁能源的利用效率[4]。
微电网下垂控制策略一直是分布式电源并联运行的关键技术之一[5]。传统下垂控制中各逆变器的频率统一,下垂控制是可以实现有功均衡的,但在无功功率均分上未综合考虑逆变器输出阻抗、线路阻抗的影响[6],其等效输出阻抗特性对逆变器集群稳定运行具有重要的影响[7-8]。
随着微电网技术的成熟,国内外学者相继针对下垂控制在微电网中存在的一些问题提出了大量的改进措施。文献[9]引入一阶高通滤波器,使得下垂控制过程中引起的电压、频率跌落得到了很好的稳定和恢复。文献[10-11]采用角度下垂控制确保在高阻性的馈线网络中均分负荷,由于直接调节逆变器的输出电压角,所以避免了稳态下的频率下降。文献[12]采用负载电压反馈和引入积分跟随项的方法,该方法需要精确的馈线阻抗参数,不适用于复杂的微电网结构。文献[13]在无功功率下垂控制算法中加入积分项,并在参考电压值中添加反馈环节,使逆变器的无功功率输出得到均分,同时系统动态性能也得到提升。文献[14]提出一种f-P/Q下垂控制方法,可以在阻感性负载和阻容性负载下稳定运行,扩大了适用范围,并且无功功率输出达到了很好的均分效果。文献[15]提出一种基于虚拟阻抗技术的主从协调控制策略并将其应用在串并联型的微电网结构中,解决了系统中功率震荡的问题,但是虚拟阻抗的加入需要进行二次调压优化。文献[16]提出了一种根据输出阻抗设置有功、无功输出参考值的改进下垂故障控制策略,可以有效解决微电网故障时电压、频率波动对输出功率的影响。
复杂的微电网结构、本地负载的加入以及阻抗参数不匹配问题都会导致功率分配不均,当仅依靠本地信息不足以均分负荷的时候,有学者提出加入通信单元的方法来辅助控制[17-19]。文献[17-18]采用不同的通信方法,对虚拟阻抗不匹配进行补偿,文献[17]基于多智能体一致性理论的通信方法降低系统对全局通信的依赖,增加了系统的可靠性。文献[19]下垂环中加入功率积分跟随项,通过跟踪通信单元传递的功率给定值来补偿电压差,该方法对于本地负荷以及公共负载的突变具有很好的适应性。综上所述,现有文献提出的改进下垂控制方法仍有所欠缺,一部分受限于参数的获取难度以及实施条件,另一部分受限于系统复杂性而无法简单有效地实施。
针对以上问题,本文从微电网输电线路阻抗特征和功率传输特性方面出发,提出一种基于虚拟电抗的自适应系数下垂控制方法。该方法的创新点在于:1)引入含有低通滤波器的虚拟电抗,在使得P、Q功率解耦的同时具有抗高频干扰的特性;2)提出基于低带宽通信的感性下垂控制,通过下垂系数的动态调节可解决逆变器等效输出阻抗不一致带来的无功分配不均衡问题。相较于国内外学者提出的各类改进下垂控制措施,本文的控制方法可适用于任意线路阻抗条件。另外,低带宽通信的加入使得系统具有动态响应速度快、稳态性能好的优点。
1 下垂控制策略
1.1 传统下垂控制
孤岛模式下任意2台逆变器并联运行的简化等效模型如图1所示。Ui、Uj、φi、φj分别为逆变器i、j的下垂控制输出参考电压幅值和相角;Up∠0为公共点的参考电压;Zi、Zj分别为逆变器i、j的等效输出阻抗(逆变器输出阻抗与馈线阻抗之和),Zi=Ri+jXi,Zj=Rj+jXj,Ri、Rj分别为逆变器i、j的电阻,Xi、Xj分别为逆变器i、j的电抗;θi、θj分别为逆变器i、j的阻抗角。
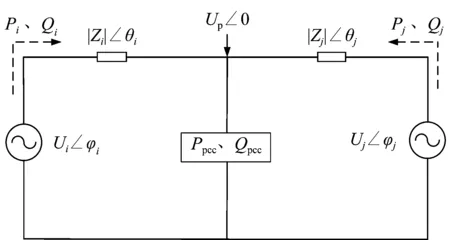
图1 两台逆变器并联简化等效模型Fig.1 Simplified equivalent model of two inverters in parallel
以逆变器i为例,由图1可得逆变器的有功功率Pi与无功功率Qi的潮流计算公式[20]:
(1)
(2)
当等效输出阻抗为感性时,阻抗角θi=90°,Zi=jXi。由于φi非常小,近似取sinφi=φi,cosφi=1。化简式(1)—(2)可得:
(3)
(4)
式(3)—(4)表明,有功功率Pi与功角φi有关,无功功率Qi与Ui-Up有关。并由文献[21]可知稳态情况下功率与等效输出阻抗的关系。
传统下垂控制方程为:
(5)
(6)

1.2 传统下垂控制的局限性
频率在整个逆变器并联系统中可视为全局变量,系统稳定运行时各个部位具有相同的频率。所以在感性传输线路中有功功率是精确均分的,并与下垂系数成反比,与逆变器的额定有功功率成正比。任意2台逆变器i、j有功功率的输出有如下关系:
(7)
由于受阻抗不匹配的影响,各逆变器的输出电压不相同。取并联系统中任意2台逆变器i、j,令:
(8)
将式(8)代入式(6)可得稳态时2台逆变器之间的电压差如下:
ΔU=Ui-Uj=kUiQi-kUjQj
(9)
将式(4)、(6)联立,消去Ui可得式(10):
(10)
将式(10)代入式(9)中得:
(11)
令ΔU=0,并结合式(8)可有:
(12)
式(12)为无功功率均分的充分条件,但在实际条件下由于受线路阻抗不匹配的影响,很难满足等效输出阻抗与额定无功容量成反比的条件。以并联系统中2台容量相同的逆变器为例,存在线路阻抗不匹配情况时,无功功率分配偏差示意图如图2所示。
从图2可看出,阻抗大的逆变器输出无功功率较小,可以通过调整线路阻抗来调节逆变器的功率输出曲线,进而达到减小功率均分误差的目的;但是由于逆变器的地理位置不同,这将导致馈线阻抗具有随机性人为难以控制的特点。另外也可以通过增大下垂系数减小功率均分误差,但下垂系数过大会导致电压对无功功率的调节能力减弱,所以下垂系数大小要适中。
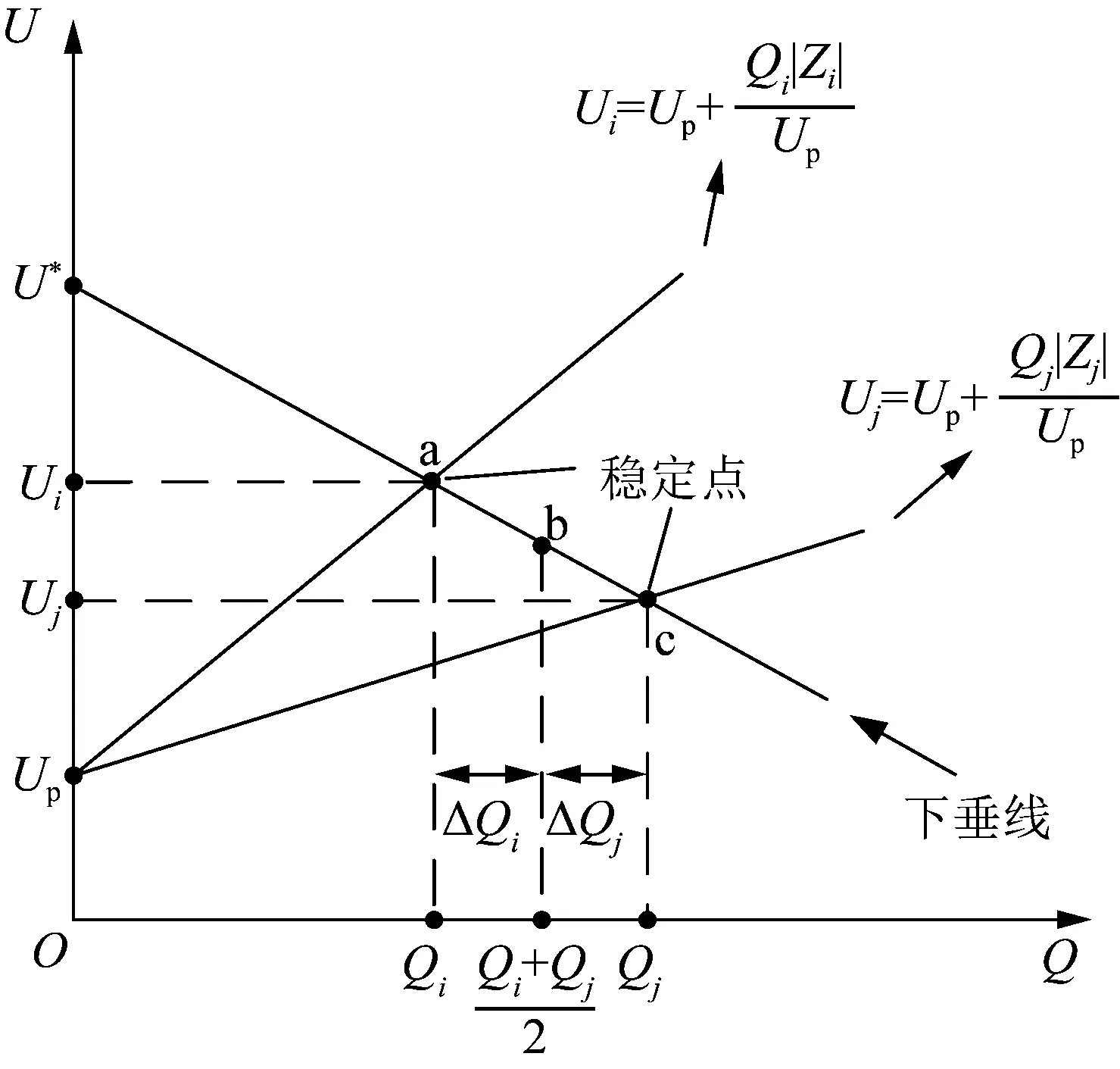
图2 2台容量相同的逆变器无功均分状况Fig.2 Equal distribution of reactive power between two inverters with the same capacity
2 改进下垂控制
2.1 引入虚拟电抗使功率解耦
当逆变器的等效输出阻抗为感性时,下垂算法中的变量ω、U与P、Q之间不存在耦合,但实际的低压微电网系统中等效输出阻抗为阻性,逆变器输出功率之间将会存在耦合现象[22],这使得传统下垂控制无法适用。为解决此问题,采用引入虚拟电抗的方法进行功率解耦。为简易说明虚拟电抗对等效输出阻抗的调节机制,以图3单台逆变器引入虚拟电抗后的等效电路图为例进行分析。

图3 引入虚拟电抗后等效电路图Fig.3 Equivalent circuit diagram after introducing virtual reactance
图3中:U∠φ为参考电压;U∠β为实际输出电压;R为等效输出阻抗电阻值;X为等效输出阻抗电抗值;XV为引入的虚拟电抗值;ΔUV为虚拟电抗引入后产生的压降。由图3可知,引入虚拟电抗后,等效输出阻抗Z=R+jX+jXV,通过改变虚拟电抗的值可以将等效输出阻抗调节成感性,解决低压电网中功率耦合的问题,使传统感性下垂控制适用于低压微电网,同时提高线路阻抗的一致性。
本文中虚拟电抗的引入过程如图4所示,负载电流ioabc作为虚拟电抗引入时的反馈电流。ΔUV与参考电压Uref合成新的双环参考电压,以此达到在电路中引入电抗的效果。
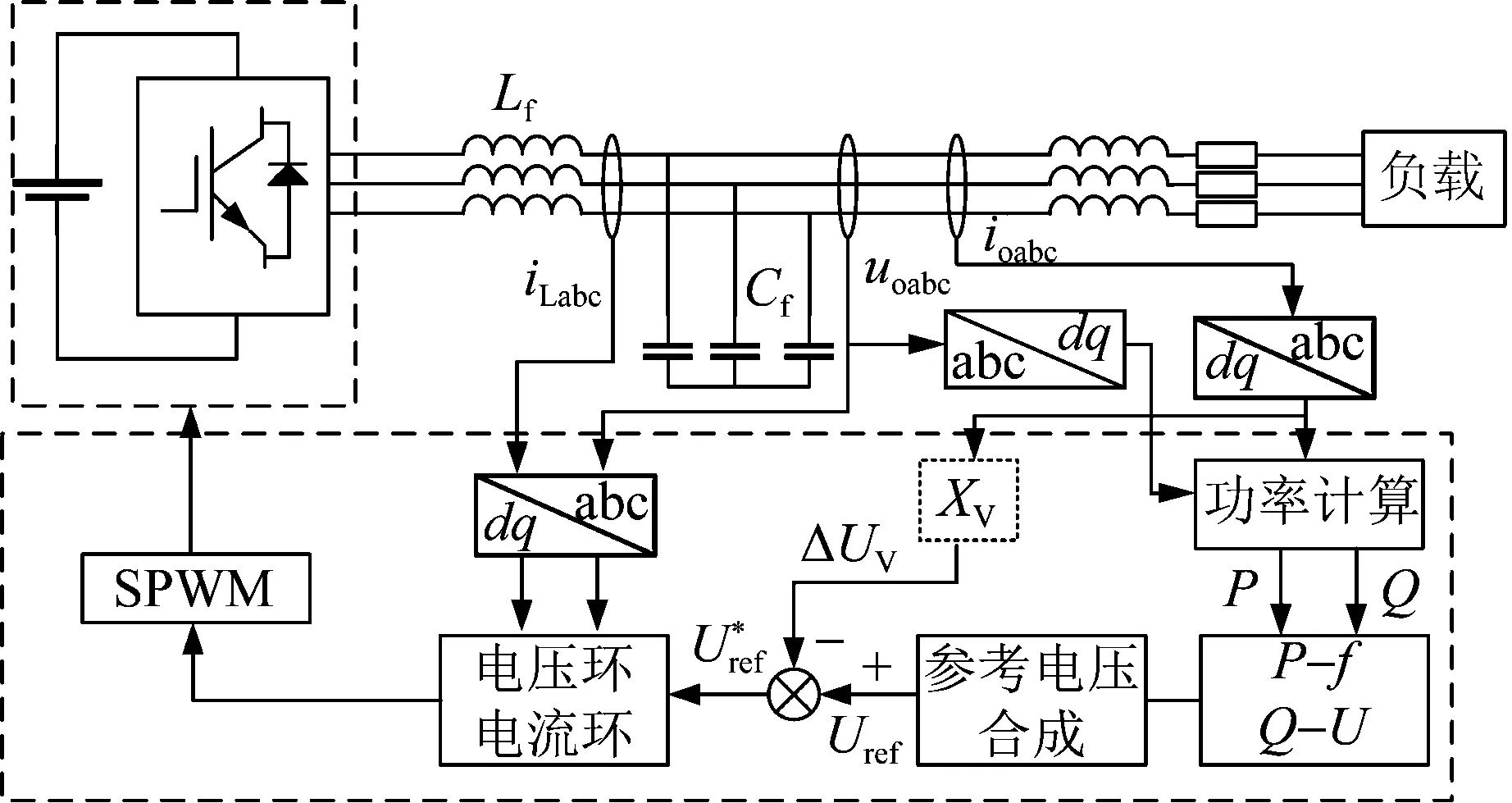
图4 虚拟电抗引入过程原理图Fig.4 Schematic diagram of the introduction process of the virtual reactance

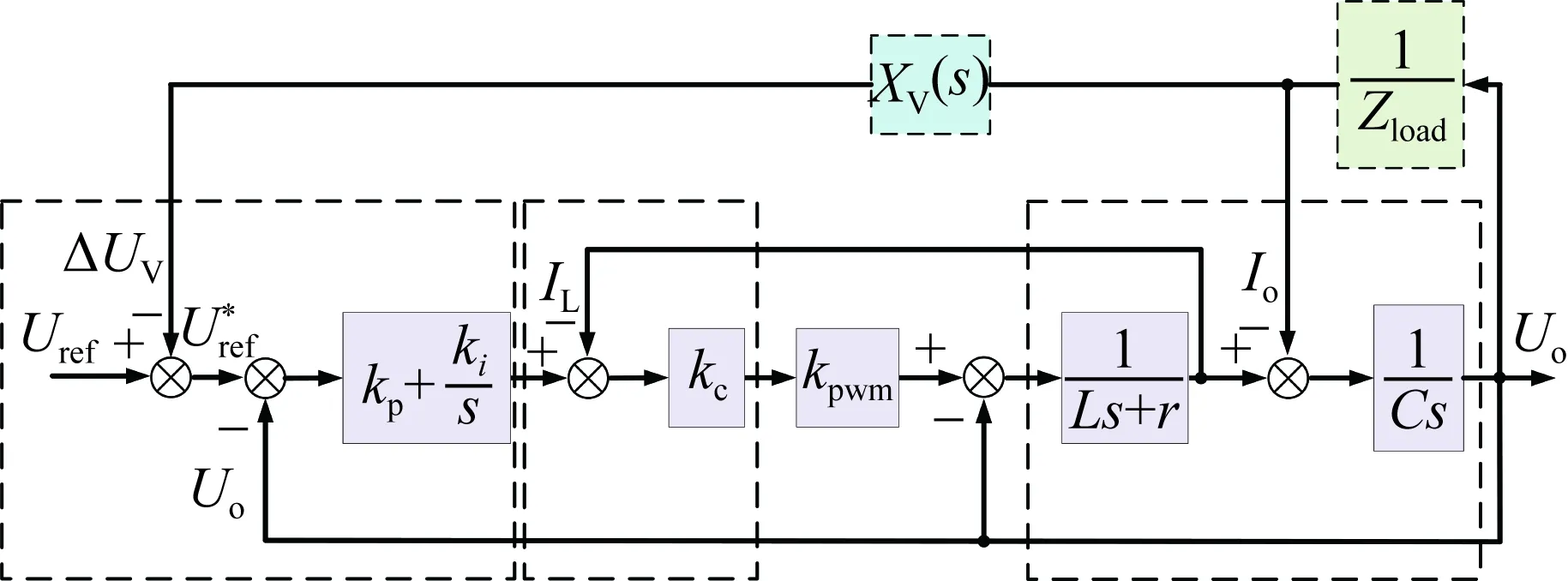
图5 电压电流双闭环控制框图Fig.5 Block diagram of voltage and current double closed-loop control
定义:
(13)
式中:GLf、GCf分别为滤波电感、滤波电容拉氏变换;Gu为电压环PI控制器的传递函数;Gi(s)为电流环P控制器与逆变器增益的传递函数;L为滤波电感;C为滤波电容;r为滤波电阻;s为拉普拉斯算子。
由戴维南定理和梅森增益公式求得未加虚拟阻抗时的闭环输出电压Uo:
(14)
式中:B(s)为电压增益;Zo(s)为逆变器输出阻抗;Io为逆变器输出电流。
(15)
Δ=1+Gu(s)GLf(s)Gi(s)GCf(s)+GLf(s)GCf(s)+GLf(s)Gi(s)
(16)
引入虚拟电抗后输出电压Uo可改写为:
Uo=B(s)Uref-[B(s)Xv(s)+Zo(s)]Io
(17)
由式(17)可得引入虚拟电抗以后逆变器输出阻抗为:
(18)
式中:ωc为低通滤波器的截止频率,可以有效避免高频噪声的干扰[23]。
为更直观地体现出虚拟电抗引入后逆变器输出阻抗的相频特性,作如图6所示伯德图。Zo为传统情况下未引入虚拟电抗的输出阻抗,在较宽的频带下呈高阻态,相角几乎为0°。该Bode图中虚拟电抗一共设定5组对比值,ZoA—ZoE取值分别为0.1、0.5、1.0、5.0、10.0 mH,随着虚拟电抗值逐渐增大,逆变器输出阻抗在较宽的频带下相角呈90°。ZoC曲线下虚拟电抗的引入值为1.5 mH,此时已达到仿真时的解耦条件,同时也验证了引入虚拟电抗可以将逆变器的输出阻抗调节为感性,对低压微电网中功率耦合问题具有很好的解耦作用。
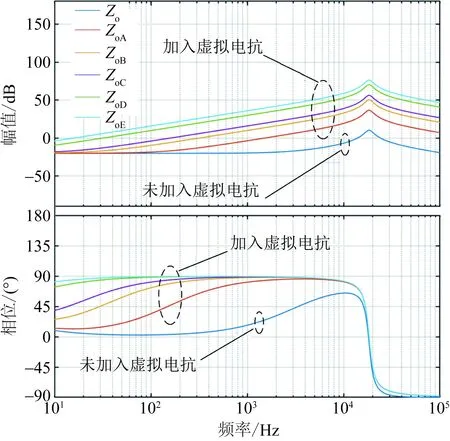
图6 虚拟电抗引入前后逆变器输出阻抗Bode图Fig.6 Bode diagram of inverter output impedance before and after virtual reactance introduction
2.2 动态下垂系数设计
虚拟电抗的加入使得低压微电网中的有功功率与无功功率得以解耦,满足传统下垂控制的条件。虚拟电抗的引入减小了逆变器之间的等效输出阻抗差值ΔZ,缓解了因为馈线长度不同,对无功功率均分不利的影响。由于线路阻抗差ΔZ仍然存在,无功功率不能精确均分问题仍未解决。本文在利用虚拟电抗解耦的基础上,提出一种基于低带宽通信的自适应系数控制方法,通过动态调节下垂系数使无功功率达到精确均分。
改进后的无功功率下垂控制算法为:
(19)
(20)
图7为改进后的动态系数下垂控制框图。相较于传统下垂控制中固定的下垂系数,改进后下垂控制算法中的下垂系数具有自适应调节能力。当逆变器输出的无功功率与给定值之间存在差值,PI控制器将会对基准下垂系数进行动态调节,进而改变逆变器的无功功率输出。在无功功率调节的过程中,有功功率输出一直处于均分状态。
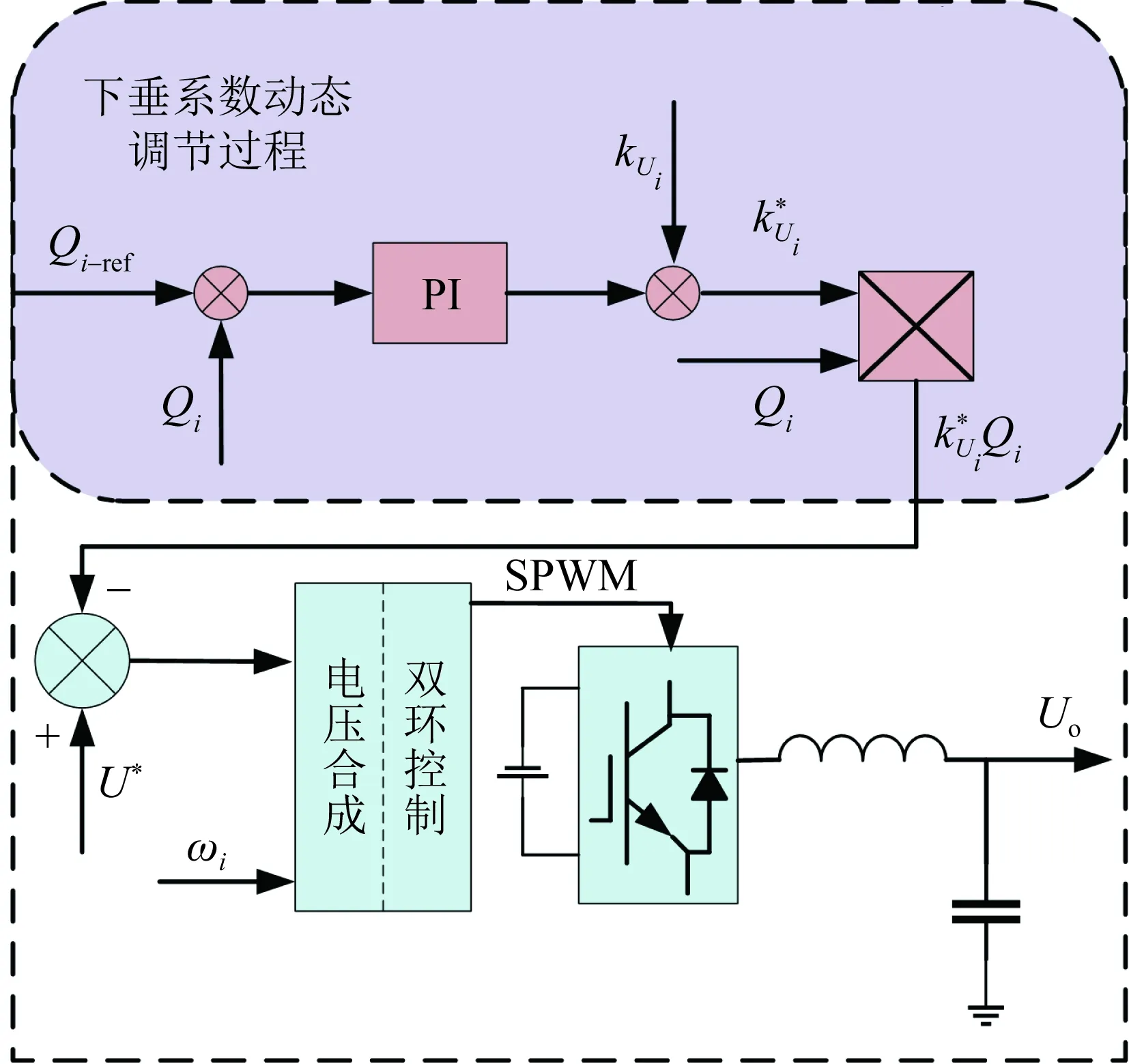
图7 动态下垂系数控制框图Fig.7 Frame of dynamic droop coefficient control
2.3 动态下垂控制结构与调节过程

图8 含有网络通信单元的微电网结构框图Fig.8 Block diagram of microgrid structure with network communication unit
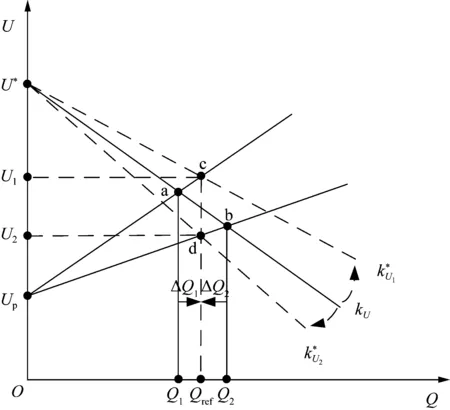
图9 动态系数调节无功功率过程Fig.9 Process of dynamic coefficient adjusting reactive power
Qi-ref与本地控制器之间的数据传输需要通信线进行链接,通信方面采用低带宽的通信方式。这将使得整个系统对通信频率要求不高。本文中Qi-ref的值每0.1 s更新一次,即通信频率为10 Hz。考虑到工作时通信中断的问题,在通信单元恢复之前下垂系数会停留在最后一次的调节值上;如在通信中断期间没有负载突变情况,逆变器输出的无功功率仍然可以精确均分。
3 仿真验证与分析
为了验证上述方法的正确性与有效性,利用Matlab/Simulink搭建了2台逆变器的仿真模型并进行4组仿真分析。逆变器馈线长度分别为700 m和500 m。阻感比为7.3 Ω/mH。其他仿真参数如表1所示。
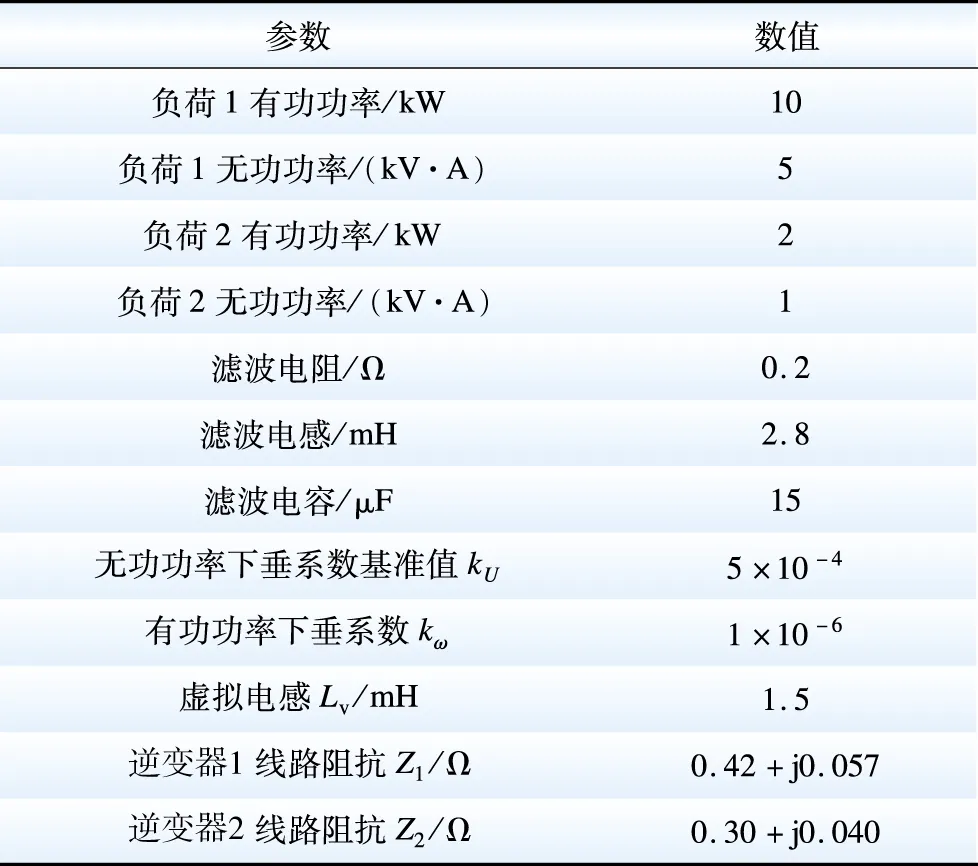
表1 仿真参数Table 1 Simulation parameters
3.1 工况1仿真
工况1控制方法采用传统的感性下垂控制算法,负荷1接入,仿真波形如图10所示。由于2台逆变器的等效输出阻抗不同,从图10(b)可看出2台逆变器的无功输出存在1.3 kV·A的功率差,从图10(a)可看出有功功率输出也未完全均分。由于线路阻抗呈阻性导致有功功率与无功功率之间存在功率耦合,即有功的输出受频率和电压两者共同影响,所以传统下垂控制要在低压微电网中应用,首先要解决的问题是功率解耦。
3.2 工况2仿真
取2台容量相同的逆变器,设定下垂系数为1∶1,馈线阻抗不相同,输电线路为阻感性。工况2的控制方法采用在传统的感性下垂公式中引入虚拟电抗解耦的方法。
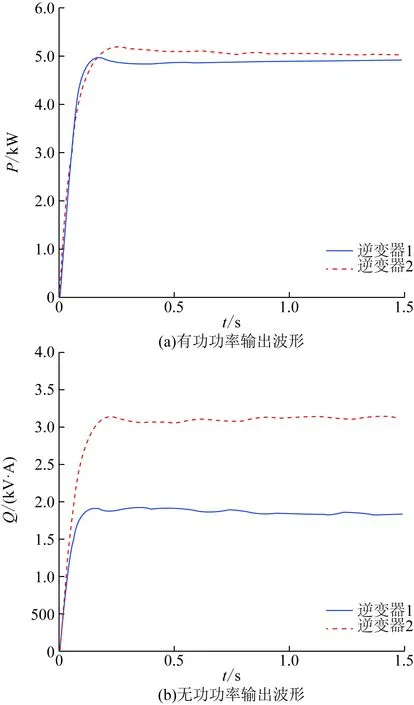
图10 工况1下的功率输出情况Fig.10 Power output under working condition 1
仿真结果如图11所示,在0 s时负荷1切入,有功功率和无功功率分别设置为10 kW、5kV·A,在0.75 s时投入负荷2,有功功率与无功功率分别增加到12 kW、6 kV·A。从图11(a)中可知有功输出在稳态时是精确均分的,2台逆变器输出的有功功率之比P1∶P2=1∶1。从图11(b)中可知逆变器1无功功率相对误差为-10%,逆变器2的无功功率相对误差为10.8%。0.75 s后由于负荷增大无功功率不均分的现象进一步恶化,功率差ΔQ=Q2-Q1由520 V·A增加至930 V·A。
由工况1与工况2对比可知,虚拟电抗的加入使低压线路中功率耦合的现象得以解决,同时缓解了阻抗不匹配的问题,但阻抗不匹配的问题仍然存在,无功功率仍不能完全均分。要想使无功功率完全均分,只能进一步加大虚拟电抗的值,以此来抵消线路阻抗不一致带来的影响,但虚拟电抗的增大会造成公共点的电压下降,影响电能质量,另外遇到负荷突变的情况时,虚拟电抗的匹配度会下降,这时仍会出现功率不能完全均分的情况。
3.3 工况3仿真
2台逆变器容量相同,在工况2基础上,采用改进的下垂控制方法(工况3),基准下垂系数如表1所示。初始负载接入负荷1。在0~0.5 s采用工况2,0.5 s时改进下垂控制策略切入,1.0 s时负荷2切入系统。逆变器的功率输出情况如图12所示。由于频率是全局变量,由图12(a)可知,当系统达到稳态时有功功率精确均分,P1∶P2=1∶1。
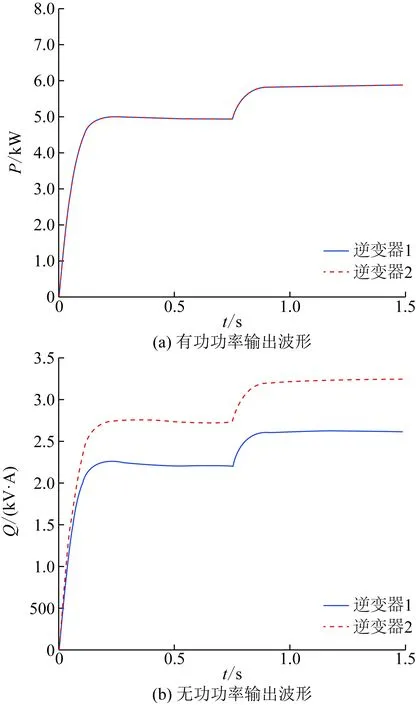
图11 工况2下的功率输出情况Fig.11 Power output under working condition 2
从图12(b)中可看出,0.5 s时开始调节2台逆变器输出的无功功率,逆变器1输出无功功率开始增加,逆变器2输出无功功率开始减少,0.6 s时无功负荷调节完毕,2台逆变器分配的无功功率比值Q1∶Q2=1∶1。在1.0 s时切入负荷2,无功功率的控制效果仍然很好,2台逆变器精确均分所有负荷。另外负荷的增加也没有引起2台逆变器有功与无功输出功率再次产生耦合现象,虚拟电抗的解耦效果良好。通过自适应调节下垂系数完全消除了线路阻抗不匹配和负荷突增致使虚拟电抗匹配度下降造成的影响。
3.4 工况4仿真
在实际系统中各个逆变器的供电容量不相同,工况4中2台逆变器按照容量比为3∶2情况分担负荷。初始负载接入负荷1,0~0.5 s采用工况2的控制方法,0.5 s时改进控制方法切入,1.0 s时负荷2切入。
图13(a)为2台逆变器的有功功率均分情况,在0.12 s时功率达到稳定,在后续的时间段中逆变器的有功功率保持3∶2的比例分担负荷。从图13(b)中可以看出,在0~0.5 s无功功率未按照容量比进行均分。0.5 s改进控制方法开始切入,2台逆变器无功功率在短时间内达到Q1∶Q2=3∶2。在1.0 s时负荷2切入,无功功率仍然能够在短时间内过渡到合理的分配状态。
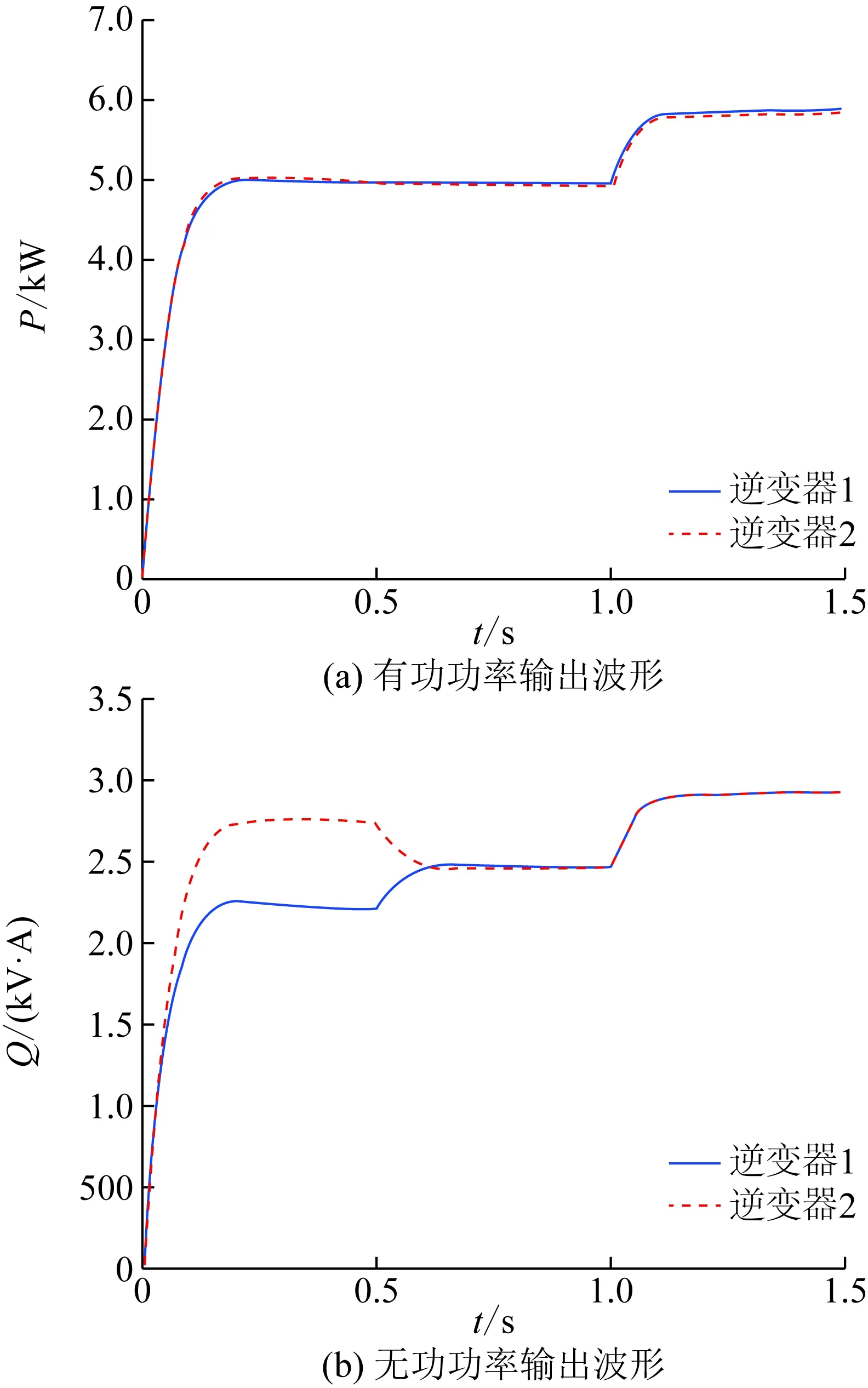
图12 工况3下的功率输出情况Fig.12 Power output under working condition 3
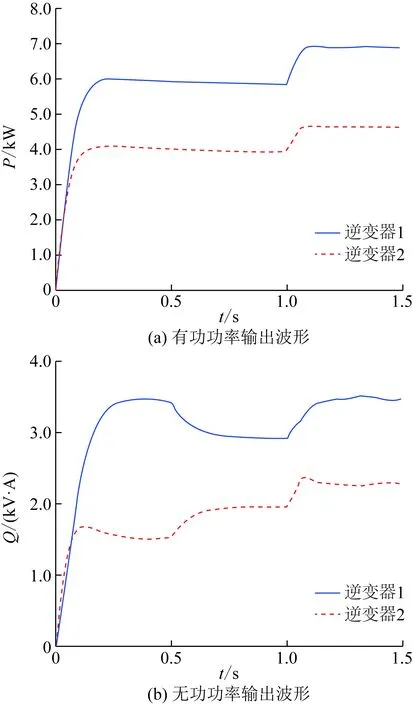
图13 工况4下的功率输出情况Fig.13 Power output under working condition 4
4 结 论
传统的下垂控制方法在低压传输线路中无法按照下垂系数分配系统负荷,其原因是低压线路阻抗呈阻性,功率之间存在耦合状态,再加上输电线路长度的随机性导致等效输出阻抗值不匹配等原因,使得传统的下垂控制方法不适用于低压线路。为了解决上述问题,本文采用了一种基于虚拟电抗的自适应下垂系数的改进控制策略,主要得到以下结论。
1)虚拟电抗的引入使得等效输出阻抗调节为感性,使传统下垂控制可以适用于任意阻抗条件下。同时,自适应下垂系数方法的引入可以使系统快速地达到功率均分,消除阻抗不匹配因素带来的影响。通过中央控制器与本地控制单元进行低带宽通信,使其具有更好的网络协调能力,并且系统对通信频率要求不高。即使在存在通信故障的情况下,其控制效果也优于传统的感性下垂控制。
2)该方法避免了线路参数的测量,可应用于多台容量相同或不同的分布式电源系统中,并且可以灵活应对负载突变情况,在短时间内达到功率输出要求。
猜你喜欢
大电机技术(2022年3期)2022-08-06
中学生数理化·八年级物理人教版(2022年6期)2022-06-05
中学生数理化·八年级物理人教版(2022年6期)2022-06-05
中学生数理化·八年级物理人教版(2022年6期)2022-06-05
时代文学·上半月(2022年1期)2022-01-15
防爆电机(2021年1期)2021-03-29
微电机(2020年9期)2020-12-04
中学生数理化·八年级物理人教版(2019年6期)2019-06-25
新商务周刊(2017年17期)2017-12-24
中学数学杂志(初中版)(2017年4期)2017-08-28