
着舰路径对舰载直升机飞行特性的影响
2022-01-12 13:22:26马东林刘纪福
直升机技术 2021年4期
赵 俊,马东林,刘纪福,罗 骏
(中国直升机设计研究所 直升机旋翼动力学重点实验室,江西 景德镇 333001)
0 引言
舰载直升机是能够在舰船上起降、停留和维护保障,并能长期驻舰使用的直升机的统称。由于当前水面舰艇所面临的水下威胁日益严峻以及海洋资源勘探不断深入,舰载直升机在军事和国民经济领域的地位不断提升。然而,从直升机上舰之初,其较高的事故发生率就引起了广泛的关注。据美国安全中心统计数据显示,舰载直升机飞行事故发生率约为宇航飞行器的5倍、军用飞行器的10倍、民航飞行器的54倍[1]。而从飞行员的反馈来看,舰艉流场对直升机的干扰是引起着舰失败的重要原因。因此,直升机着舰过程中的飞行安全边界问题一直是研究人员关注的重点和热点[2-4]。
在早期研究中,研究人员侧重于分析舰艉流场对直升机的气动干扰特征。Narducci等[5]基于OVERFLOW求解器,采用动量源模型对V-22/LHD耦合流场进行了数值模拟研究,并与海上实测结果进行了对比。结果显示,该方法可以较好地模拟耦合流场的速度分布,表明了动量源模型在机/舰耦合流场模拟中的有效性。随后,Lee等[6-7]采用嵌套网格技术对旋翼进行实体建模,开展了机/舰耦合流场非定常特性的模拟,首次从舰船结构设计的角度指出,当舰载直升机靠近机库门时,旋翼的周期性尾迹会使得机库门产生交变载荷,可能导致机库门结构出现疲劳问题。随着研究的深入,研究人员开始关注舰艉流对直升机飞行特性的影响,并将基于操纵余量获得的舰载直升机风限图作为直升机飞行安全边界的重要评判准则。Bogstad[8]和Roper[9]等采用定常CFD求解的方式获得艉流场数据,并将其用于直升机飞行特性计算。计算结果较好地反映了真实条件直升机操纵余量的变化。Lee等[10]以全尺寸的LHA舰船和UH-60A直升机为组合模型,采用CFD求解器PUMA2,研究了“直通式”甲板流场对直升机飞行特性的影响。尽管舰船艉流的模拟相对简单(无粘控制方程),但从结果却可清晰地看出舰艉流对于飞行员操作的强干扰作用。国内的杨俊[11]对定常艉流场影响下的常规共轴直升机平衡特性进行了初步研究,获得了不同风速及风向角情形下共轴直升机操纵量的变化规律。上述研究为分析直升机着舰飞行安全边界提供了良好的基础。然而,在这些研究中,更侧重于分析直升机在典型位置处的操纵量,直升机着舰路径对飞行特性的影响研究则涉及较少,使得上述研究成果在指导实际着舰飞行时仍存在不足。
鉴于此,本文拟开展着舰路径对舰载直升机飞行特性的影响研究。首先,建立适合于着舰飞行研究的直升机飞行力学模型,构建CFD向飞行力学计算的数据传递策略,从而形成一套适用直升机/舰船动态界面数值分析的方法;然后,基于该方法,研究了着舰过程中直升机在典型位置处的平衡特性,并进一步对比分析了不同着舰路径下直升机风限图的变化特征,以期望得出一些对直升机着舰分析有价值的结论。
1 直升机着舰飞行特性数值分析方法
1.1 基于分离涡模型(DES)的高精度舰船流场数值方法
气流流经舰船上层建筑时会在其锐缘发生流动分离,从而在舰船附近形成包含不稳定剪切层、大尺度涡结构等特征的复杂流场,对其进行高精度模拟,获得高置信度的艉流场数据是开展直升机着舰飞行特性研究的前提。从国外数值研究来看,DES方法能够较好地捕捉舰船流场特征,因此本文采用该方法来对舰船流场进行数值模拟。该方法的基本思想是在舰船边界层内采用雷诺平均N-S方程(RANS)进行求解,而在湍流充分发展区域采用大涡模拟(LES)进行求解。
在DES方法中,通过将当地网格尺度与RANS计算得到的网格中心到壁面的法向距离进行比较来进行 RANS 方法和LES方法之间的转换。DES方法中的长度尺度可以定义为:

(1)
式中:CDES为常数,在本文舰船流场计算中可取CDES=0.65;Δ为网格单元的特征尺度,Δ=max(Δx,Δy,Δz)。当dRANS
依据Polsky等人[12]的研究成果,本文选取k-ωSST 湍流模型以提高RANS方法对于舰船边界层流动的模拟精度。在应用k-ωSST 湍流模型时,还涉及到k和ω的选取,其初始值可根据湍流强度I以及湍流尺度l来确定:
(2)

1.2 CFD向飞行动力学模型的数据传递策略
常规直升机飞行动力学模型已比较成熟,本文不再对其建模进行具体描述。此处将重点介绍CFD向飞行动力学模型的数据传递策略。本文基于“单向耦合”思想建立直升机着舰飞行特性数值分析方法。在该方法中,旋翼和机体被离散为若干气动计算点,如图1所示。其中,每片桨叶上有10个气动计算点,机身、平尾、垂尾、尾桨各一个,共44个气动载荷计算点,通过向各点导入流场数据来模拟艉流场对直升机的干扰。
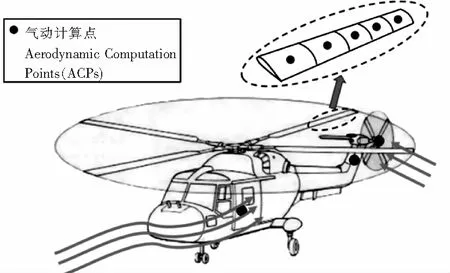
图1 直升机气动载荷计算点示意图
以桨叶微段为例,假设在时刻t0,艉流场的瞬时速度场为Wgust(t0,uG0,vG0,wG0),桨叶微段在桨叶坐标下的坐标为(t0,xb0,yb0,zb0),旋翼桨毂中心在机体坐标系下的坐标为(xMR,yMR,zMR),则其在舰船坐标系下的坐标可表示为:
(3)
式中,TRb、THR、TBH、TEB以及TCE分别表示桨叶坐标系到旋翼旋转坐标系转换矩阵、旋翼旋转坐标系到桨毂坐标系转换矩阵、桨毂坐标系到机体坐标系转换矩阵、机体坐标系到惯性坐标系转换矩阵、惯性坐标系到舰船坐标系转换矩阵。
在获得桨叶微段在舰船坐标系下的位置坐标后,采用距离导数加权方法对艉流场数据进行插值,如下式所示:

(4)
其中:

(5)
式中:s表示桨叶微段中心待插值的速度分量;si为与微段中心相邻数据点的速度分量;(xCi,yCi,zCi)为该相邻点的位置坐标;di表示该相邻点到微段中心的距离;α为调节距离权倒数的指数;n为相邻数据点的个数。由于在本文的研究中,艉流场数据采用结构网格的形式进行存储,桨叶微段中心最终会落到数据域某个矩形单元内,因此n=8。实践表明,α=2即可保证较高的插值精度。
通过上述插值即可得到微段中心在舰船坐标系下的艉流场扰动速度分量,然后将该速度分量转换到桨叶坐标系下即完成了一次插值过程。转换后微段中心的艉流场速度分量为:
(6)
通过坐标转换将舰船流场速度分量变换到桨叶坐标系下,然后通过线性叠加的方式将艉流场分量以扰动的形式添加到微段气动计算点,即可计算桨叶微段气动力,最终获得旋翼气动力和力矩。其他部件气动计算点与此类似,在此不再赘述。通过将桨叶挥舞运动方程与刚体动力学方程联立即可得到直升机飞行动力学方程,其简化形式为:

(7)
式中:t是时间变量;X、U分别为直升机状态变量和操纵变量;Wgust为艉流场引起的直升机各部件相对速度。
1.3 基于直升机平衡特性的风限图计算方法研究
风限图是指某一舰载直升机/舰船组合,在给定昼夜、海况、起降方式、任务重量等条件下,直升机在其载舰上起降时不同风速、风向的最大安全边界。本文研发了一种基于直升机平衡特性的新的风限图快速计算方法。该方法的基本策略为:对着舰路径进行离散,选取其中关键位置,对不同风向角及风速下直升机的平衡特性进行计算,计算中直升机与舰船保持相对悬停状态;与理论风限图判据进行对比从而获得在该位置处的风限图;在获得不同位置处的风限图后,综合各风速安全边界,即在同一风向角下取较小的风速值,最终合成的风限图可视为此着舰路径下的着舰安全边界。
一般而言,直升机与不同尺寸舰船进行组合时,其理论风限图的安全判据并不相同。本文在UH-60A路基操纵规范[13]的基础上,考虑到艉流场的扰动及SFS2舰船后台阶构型对飞行员视野和操纵空间的限制,选定如表1所示的约束条件作为风限图绘制的判据。此外,在进行风限图计算时,还要考虑UH-60A直升机的固有风速限制。例如,旋翼在启动和停转过程中要求任意方向上的来流速度不超过22.5 m/s,直升机侧飞速度不超过17.5 m/s。

表1 理论风限图安全判据
1.4 算例验证
由于缺乏试验数据,本文以UH-60A /SFS2组合为算例,将直升机载荷计算值与Kääriä[14]的计算结果进行对比,以验证本文所建立的直升机着舰飞行特性数值分析方法的有效性。在该算例中,采用DES方法对SFS2艉流场进行求解,风速为40 kts(20.58 m/s),风向角为0°。将获得的艉流场数据导入到飞行力学模型中,初始的总距、纵/横向周期变距值分别为15.25°、2.36°和-2.56°,计算结果如图2所示。可以看到,本文计算得到的旋翼时均拉力变化趋势与Kri[14]的计算结果基本一致。进一步分析时均拉力可以看出,在移动至着舰域中心(y/B=0.0)过程中,旋翼拉力减小了10%,这也与实际着舰飞行试验相符。这充分说明了本文所建立的方法的有效性。
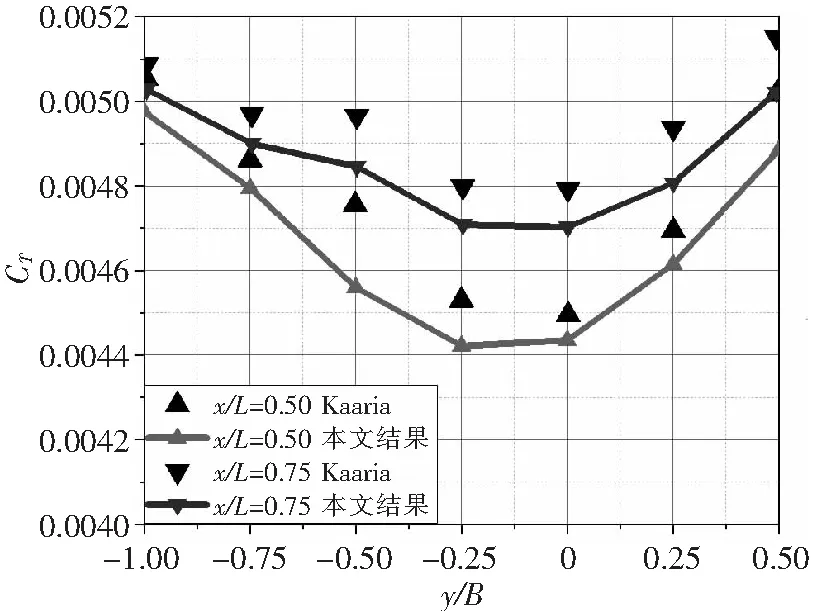
图2 直升机时均拉力系数变化曲线
2 着舰路径对舰载直升机飞行特性的影响
2.1 计算模型及网格划分
本文以UH-60A和SFS2舰船为组合开展着舰路径对舰载直升机飞行特性影响研究。采用网格生成软件生成10Ls(长)×8Ls(宽)×6Ls(高)的矩形计算域网格(Ls为舰船长度)。入口及出口边界分别设定为速度入口和压力出口条件,舰体为无滑移壁面,海平面及其他计算域表面均设定为滑移壁面。为模拟物面粘性边界层的作用,在舰体表面生成边界层网格。边界层第一层网格厚度为1.5 mm(y+值范围为25~320),保证满足湍流模型计算所使用的壁面函数的y+条件;边界层网格增长率为1.1。舰体附近网格尺寸(Δ0/H)约为4.5×10-2,以保证对舰船附近流动特征的精细捕捉;最终SFS2计算模型的总网格数量为7.2×106。舰船坐标系原点位于甲板与机库交线的中点上,x轴指向舰尾,y轴指向右舷,z轴垂直甲板指向上方,如图3所示。

图3 SFS2计算域网格
艉流场数据域长度为1.0L,宽为2.0B,高为2.0H,覆盖了直升机横向侧移及在各位置处姿态变化所经历的空间范围。其中,L、B、H分别为甲板的长、宽以及机库高度。艉流场数据采用DES方法进行数值模拟获得,数据时长为30 s。本文主要研究艉流场空间特性对直升机平衡特性的影响,因此还要对非定常艉流数据进行时均化处理。为了便于说明,本文采用国外标准海军术语[15]来描述舰船相对来流方向,即当来流分别从右舷和左舷吹来时,定义为“Green”和“Red”。因此,右舷和左舷30°来流可分别表示为G30、R30 WOD(wind-over-deck),0°风向角表示为0 WOD。
2.2 典型位置下直升机的平衡特性
直升机在垂直降落到甲板之前,会在着舰点上方约与机库同高度处(即(0.5L,0B,1H))保持相对悬停以等待舰船运动的静息期。因此,直升机在该位置处的平衡特性对于分析直升机着舰过程中的操纵余量具有较好的参考价值。图4计算了此位置处直升机在时均艉流场中配平的操纵量、姿态角及需用功率随风速及风向角的变化曲线。图中正、负风向角分别表示左舷风和右舷风。在所研究的风速及风向角范围内,总距杆量仅在40%~60%间波动(图4(a)),即飞行员有充足的总距操纵余量来维持高度的稳定。这也表明在一般情形下,总距操纵余量对飞行员着舰操作影响较小。此外,从其变化趋势可以看到,在较小风向角时飞行员需要施加更多的总距杆量以保持垂向受力平衡。
从横向操纵杆量的变化趋势(图4(b))可以看到,对于右舷风,随着来流速度增大,直升机横向杆量增加,使得直升机向右滚转幅度加大(图4(e));而对于左舷来流,随着风速增大,横向杆量逐渐减小(即向左的横向杆量增大),导致直升机滚转姿态更加向左倾斜。值得注意的是,在右舷风-30°≤WOD≤0°范围内,直升机仍施加了向左的横向杆量。这是由于尾桨提供了部分向右的侧向力。也正是由于此原因,在相同风速时,右舷风情形下直升机向右滚转的幅度小于左舷风情形下直升机的左倾幅度(图4(e))。不仅如此,从图4(e)还可看到,在左侧风情形下,由于来流中的正向侧洗分量会增大尾桨桨叶有效迎角,使得尾桨拉力增大,进而导致机头左偏,因此随着风速、风向角增加,直升机配平的脚蹬量增大(使机头向右偏);而右侧风情形下脚蹬量的变化趋势恰好相反,且当风速、风向角增大到一定程度时,出现了负脚蹬操纵,表明在这些情形下飞行员已无法维持机头朝向的稳定。这也意味着,脚蹬余量是限制飞行员着舰操作的重要因素,尤其是在大侧风情形下。
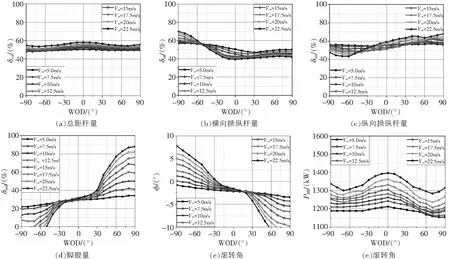
图4 直升机在时均舰艉流场中的平衡特性随风速和风向角的变化曲线
由于UH-60A直升机尾桨具有20°倾角,因此尾桨拉力的变化还会对纵向杆量操纵带来影响。在左舷风情形下,尾桨拉力增大会给直升机附加低头力矩,飞行员需要施加向后的纵向杆量以抵消这种影响。因此从图4(c)可以看到,在该风向条件下,随着风速、风向角增加,直升机配平的纵向杆量逐渐增大,而右舷风情形正好相反。
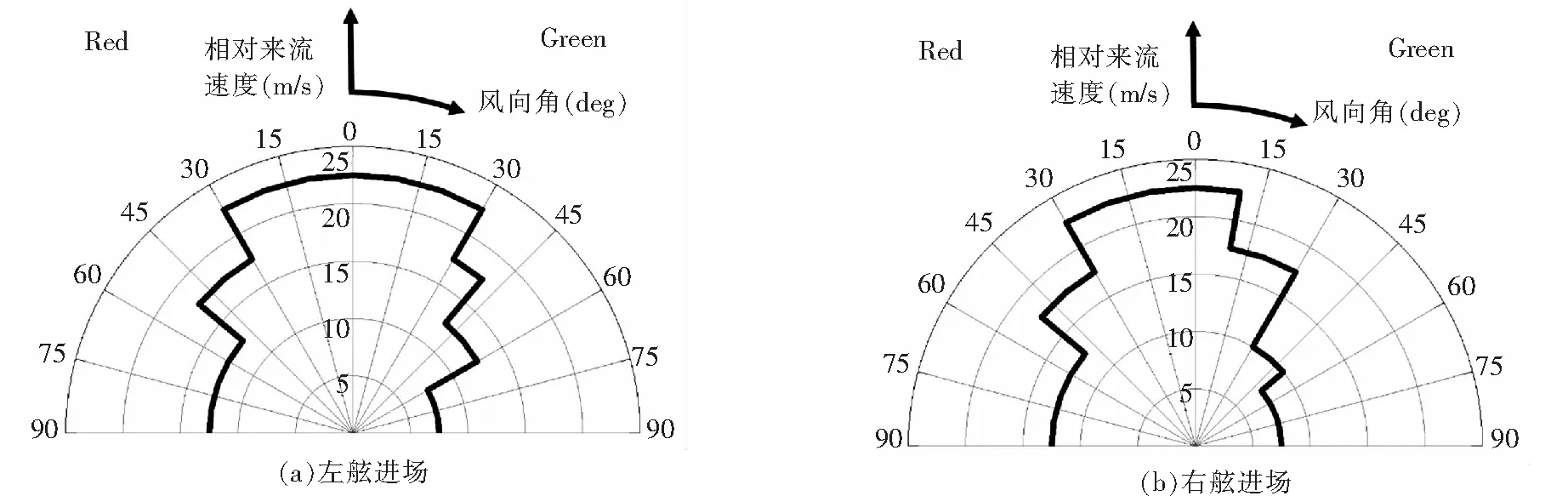
为了进一步分析上述直升机平衡特性变化趋势的内在原因,图5给出了0 WOD和G30 WOD情形下z/H=1.0平面内的时均横向速度分量分布云图,还标示出了旋翼和尾桨的相对位置。在侧风情形下,从机库迎风侧垂直边缘形成的摆动剪切层结构将着舰域划分为横向速度区别较为明显的两个区域,图中分别标示为Ⅰ和Ⅱ。受剪切层与主流动量交换的影响,区域Ⅱ内的横向速度明显小于区域I,即剪切层对自由来流中的侧洗有显著的削弱作用。从图5中还可以看到,在G30 WOD情形下尾桨恰好进入侧洗较强的主流区I,可以推测,当-30° 图5 不同风向角下z/H=1.0平面内各时均速度分量分布云图 图6计算给出了直升机分别在着舰点、右舷及左舷上方悬停时的风限图。由图4(d)可知,对于右旋直升机,受脚蹬量的影响,其抗右侧风能力显著弱于抗左侧的风能力。因此从图6(a)可以看到,即使在着舰域中心,直升机风限图左、右风速边界并不对称,且右侧风速安全边界要小于左侧情形,尤其在大风向角情形下。此外,在左侧大风向角情形下,限制风限图风速边界的主要因素为滚转角。这是由于尾桨提供了部分向右的侧向力,导致在相同风速时,左侧风情形下机身左倾的幅度要大于右侧风情形下机身右倾的幅度。因此,随着风速及风向角的增大,左侧风情形下机身的滚转角先达到滚转角判据。尽管如此,风限图左侧风速安全边界仍高于右侧,这表明相较于滚转角限制因素,直升机在着舰过程中对脚蹬余量更为敏感。 图6 直升机在不同悬停位置处的风限图(UH-60A/SFS2) 当直升机位于右舷上方(图6(b)),由图5可知,此时尾桨进入负向侧洗速度较大的主流区(Ⅰ),这使得尾桨拉力大幅降低,飞行员需要施加更多的脚蹬量以维持机头的朝向稳定。因此,从整体上看,此位置处风限图右侧风速安全边界要小于着舰点上方情形。而当直升机处于左舷上方时,受摆动剪切层与主流动量交换的影响,其尾桨受负向侧洗速度的作用较小。不仅如此,相对于着舰点上方情形,该情形下的尾桨更加远离主流区(Ⅰ),即使在G30 WOD时,直升机尾桨仍位于较小的负向侧洗速度区(Ⅱ);而在相同风向角时(例如G30),着舰点上方情形时的尾桨已进入负向侧洗速度较大的主流区(Ⅰ)(图5)。这就使得直升机在左舷上方悬停时风限图右侧风速安全边界最大。 基于本文所提出的风限图快速计算方法,将图6(a)分别和(b)、(c)进行合成,即可近似表示直升机从右舷/左舷横向侧移至着舰点上方过程中的风限图,如图7所示。可以看到,当右旋直升机从舰船左侧进行横向侧移时,其风限图与在着舰点上方保持相对悬停时的风限图一致。这进一步说明了着舰点上方与机库相同高度位置处直升机的平衡特性具有较强的代表性。事实上,国外采用虚拟飞行仿真技术绘制理论风限图时,也会要求飞行员在该位置处保持相对悬停状态20 s左右,以其工作载荷作为风速安全边界的判断依据[15]。此外,对比图7(a)和(b)可以看到,当右旋直升机从舰船右侧进场时,风限图右侧风速边界明显小于从左侧进场情形。由上文分析可知,这主要是由于尾桨气动环境不同所引起的。这也意味着,若从直升机操纵余量(尤其是脚蹬余量)的角度出发,右旋直升机从舰船背风侧(即左舷)进场相对较好。 图7 直升机分别从左舷和右舷着舰时的风限图(UH-60A/SFS2) 本文建立了常规直升机着舰飞行特性数值分析方法。采用该方法对着舰过程中直升机在典型位置的平衡特性进行了研究,并重点分析了不同着舰路径下直升机的风限图特征及其影响机理,得出结论如下: 1) 本文建立的常规直升机着舰飞行特性数值分析方法,能够准确地计算直升机飞行过程中的平衡特性,较好地实现了飞行力学和CFD方法间的单向耦合,适用于直升机着舰飞行特性研究。 2) 在一般情形下,总距操纵余量对飞行员着舰操作影响较小,而脚蹬余量往往是限制飞行员着舰操作的重要因素,尤其是在大侧风情形下。 3) 若从直升机操纵余量(尤其是脚蹬余量)的角度出发,右旋直升机从舰船背风侧(即左舷)进场相对较好,此时直升机飞行安全边界相对较大。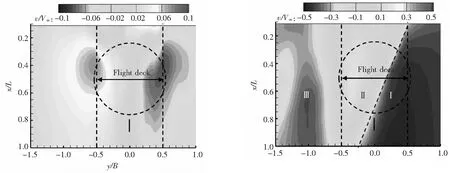
2.3 不同着舰路径下直升机风限图研究

3 结论
猜你喜欢
知识就是力量(2023年3期)2023-03-17 16:51:51
舰船科学技术(2022年21期)2022-12-12 08:07:10
航空学报(2022年2期)2022-03-29 07:49:38
南京航空航天大学学报(2021年2期)2021-05-06 03:06:38
舰船科学技术(2021年12期)2021-03-29 01:28:44
小资CHIC!ELEGANCE(2016年26期)2016-12-13 20:06:51
知识经济·中国直销(2016年3期)2016-02-27 16:15:34
舰船科学技术(2016年1期)2016-02-27 15:39:26
海军航空大学学报(2015年1期)2015-11-11 17:18:24
风能(2015年8期)2015-02-27 10:15:11
