基于LTE Cat-1的无线静力水准仪系统设计
2022-01-11 10:20:44余光华尹海博
大地测量与地球动力学 2022年1期
徐 熊 余光华 张 宇 李 鸣 尹海博
1 南昌大学信息工程学院,南昌市学府大道999号,330031
不均匀沉降是指相邻2个结构体中基础沉降量的差值,沉降量差值过大会导致上部结构产生额外应力,产生裂缝、倾斜、倒塌等现象,因此对其进行监测是工程监测中不可忽视的一环[1]。目前测量不均匀沉降的仪器主要有水准仪[2-3]、经纬仪、测距仪等。LTE Cat-1是一种介于5G与2G通信之间的中速率通信方式,可无缝接入现有的LTE网络中,无需针对基站进行软硬件升级,网络覆盖成本低,具有广泛的应用价值[4-6]。
针对传统的嵌入式有线静力水准仪使用复杂、无法将现场数据直接传输给质检中心,且易造成数据不真实等问题,本系统将新型物联网技术融入到静力水准仪的设计中。
1 设计原理与方案
图1为静力水准仪的设计原理,该系统基于连通器原理,利用重力作用下静止液面总保持同一水平的特性来测量监测点之间的垂直高度差异和变化量。原始状态下,2个水柱处于同一水平面上,当发生沉降时,水柱的相对高度发生变化,可根据式(1)求出相对高度的大小[7-9]:
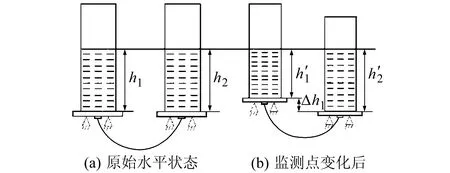
图1 静力水准仪工作原理Fig.1 Working principle of static level
P=ρgh
(1)
式中,P为水柱对底面的压强,ρ为水的密度,g为重力加速度,h为水柱高。
将水柱高度的测量转换为水柱压强的测量。本系统采用进口高精度单晶硅压强传感器,量程为20 kPa,由式(1)计算得到系统的最大量程为2 000 mm,传感器的精度为0.005 mm,通过计算得到系统的测量精度可达0.1 mm。系统采用16位模数转换芯片,分辨率可达0.01 mm,因此综合传感器相关参数的计算与分析后认为,传感器完全满足系统设计需求。
系统设计框架如图2所示,包括数据采集终端、数据接收基站、客户端3个部分,其中数据采集终端主要由压强传感器、ZigBee终端、Cortex-M3微控制器组成,利用ZigBee终端建立多个数据采集节点,实现多点监测;数据基站由ZigBee协调器、Cortex-M3微控制器、Wi-Fi模块、LTE Cat-1等组成,ZigBee协调器收集多个ZigBee终端的数据,用户可通过PC端或者移动端连接Wi-Fi模块对数据进行现场查看,LTE Cat-1模块将数据上传至服务器;客户端主要是针对质检中心或从事市政工程行业的工作人员所设计的,方便查看现场监测结果,防止数据造假。数据采集终端与数据接收基站的软件设计基于嵌入式实时操作系统FreeRTOS,使用该操作系统进行软件设计省去了程序时序与逻辑的考虑,大幅降低了程序设计的难度[10-11],但需要占用一部分系统RAM资源。
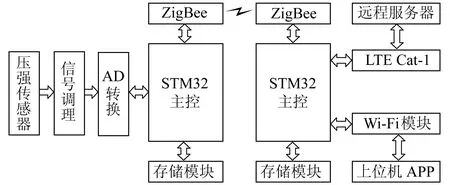
图2 系统设计框架Fig.2 System desire framework
2 系统硬件设计
2.1 数据采集终端
数据采集终端由Cortex-M3微控制器、ZigBee终端、压强传感器、锂电池充放电电路等组成。微控制器从传感器处获取采集到的压强信号,经过处理后形成沉降数据并经由串口通信发送给ZigBee终端,最后由ZigBee终端发送给ZigBee协调器。微控制器的最小系统由时钟电路、电源电路、复位电路、调试电路组成,时钟电路由8 M的晶振与2个22 pF的电容组成,产生时钟信号;电源电路由6个0.1 μF的滤波电容组成,分别连接在微控制器的每个电源引脚处,起到去耦作用;复位电路由复位按键与10 K电阻、10 μF电容组成;调试电路包括程序烧录接口和串口,具体电路设计如图3所示。
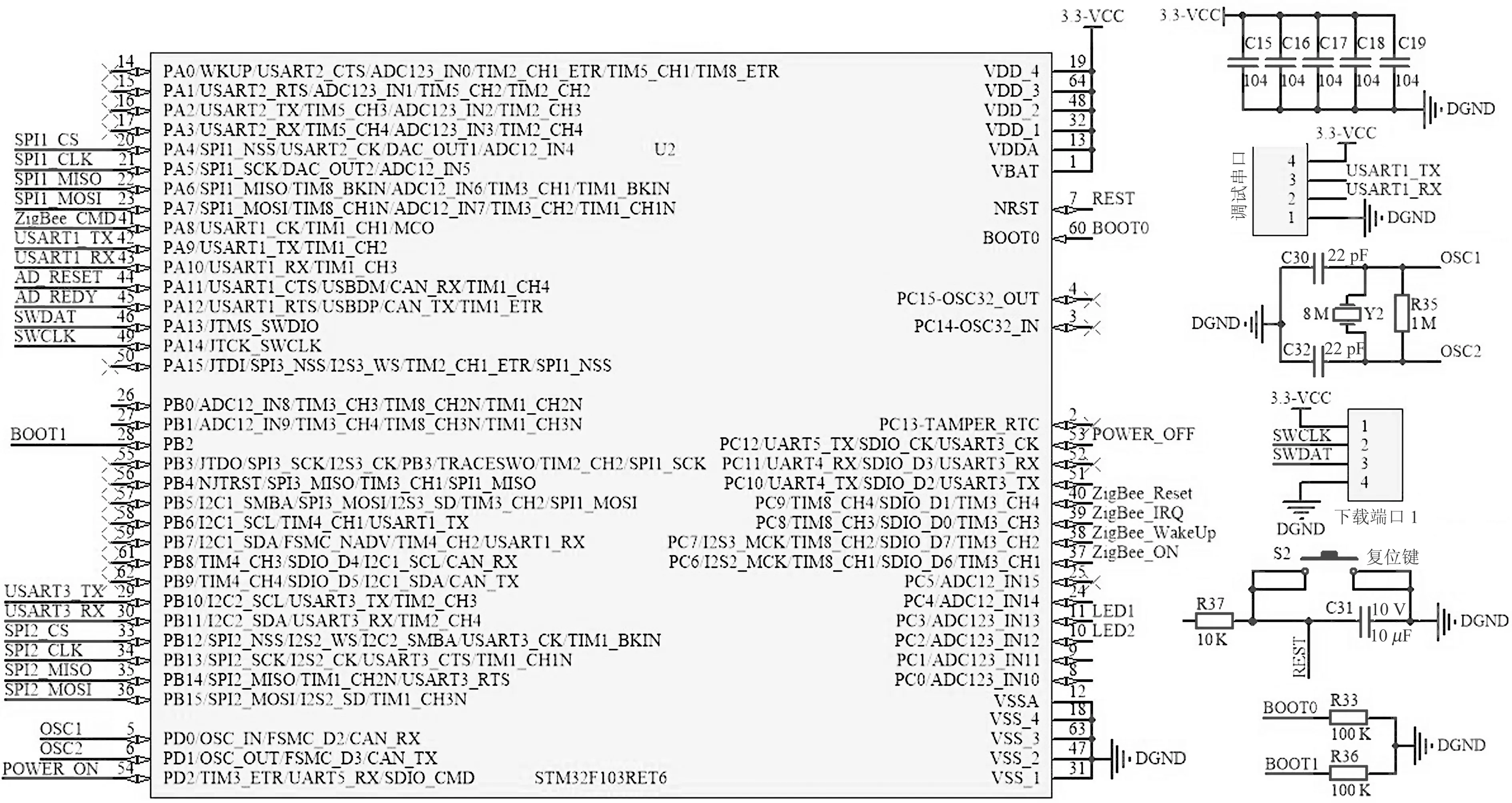
图3 控制器外围电路Fig.3 Controller peripheral circuit
图4为ZigBee终端电路,芯片型号为CC2530。ZigBee的本质是单片机,同样具有串口,因此固件的烧录与调试都是通过串口进行的,即图中的P0.2和P0.3引脚。该串口还用于与Cortex-M3微控制器进行通信,获取采集到的沉降数据,2条串口电路上都串联0 Ω的电阻,电源接口与GND引脚之间有10 μF和0.1 μF的电容并联,用于滤波,电源供电电压为3.3 V。
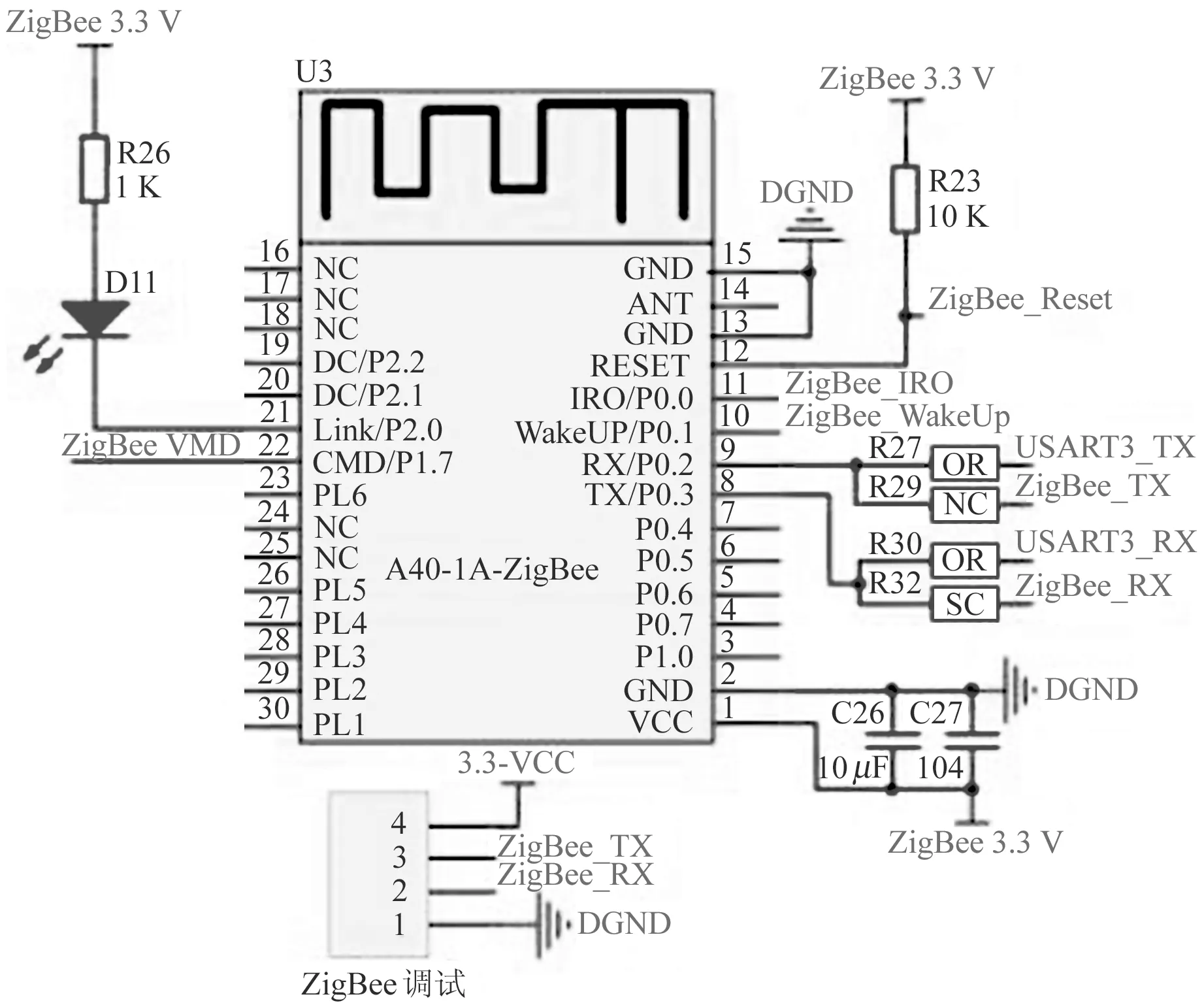
图4 ZigBee终端电路Fig.4 ZigBee terminal circuit
为使设备低功耗运行,延长锂电池的使用寿命,设计ZigBee终端的电源管理电路,如图5所示。ZigBee终端不工作期间,通过Cortex-M3微控制器将电源关闭。
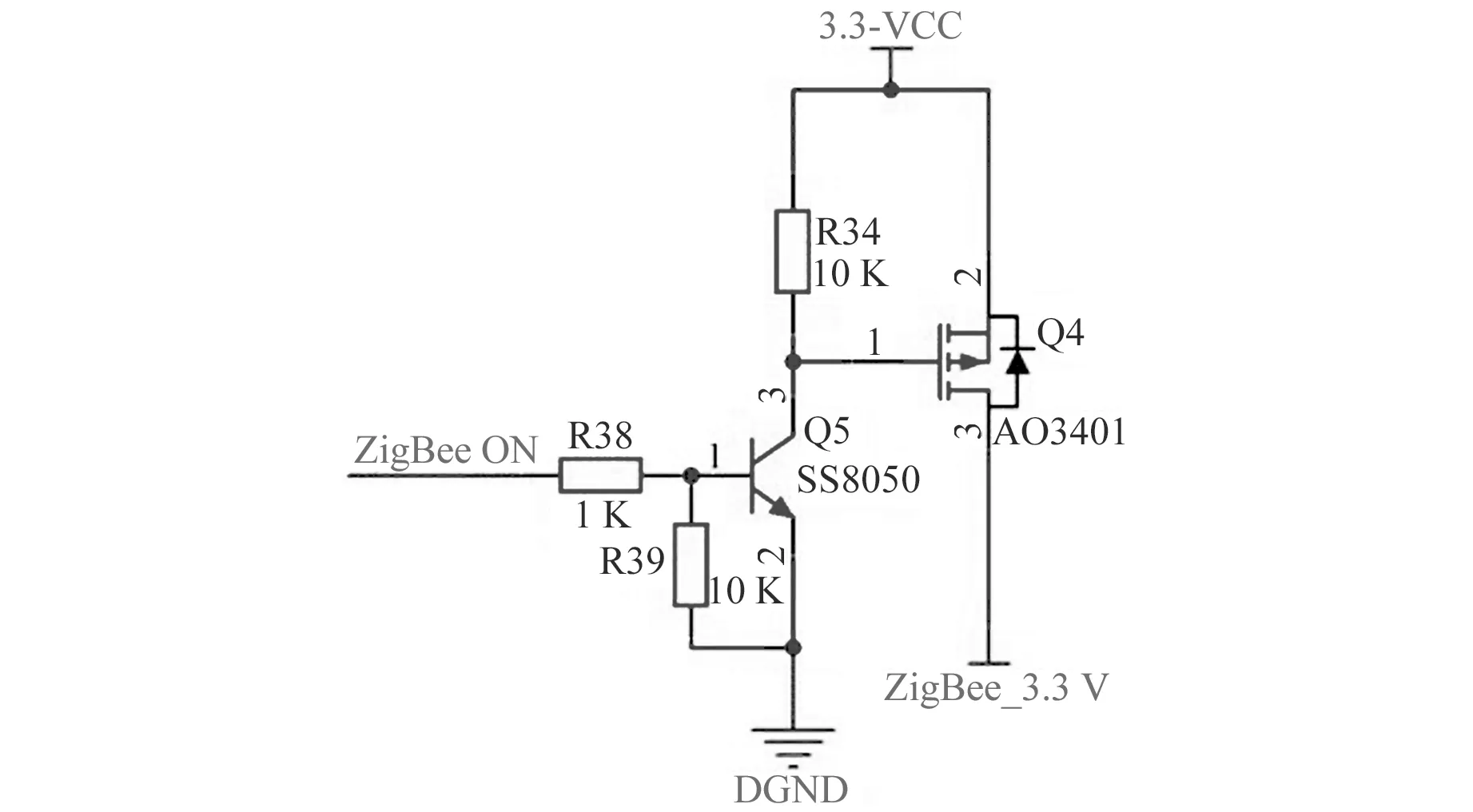
图5 电源管理电路Fig.5 Power management circuit
压强传感器型号为HALO-XQ-WG,量程范围在0~20 kPa,工作温度范围为-20~70 ℃,工作电压为5 V,测量精度可达0.005% FS。图6为信号采集电路,图中P3和P4接压强传感器,引脚2为信号输出引脚,由于压强传感器采集到的是模拟信号,故需要使用AD转换芯片将模拟信号转换为数字信号,这样微控制器才能进行数据处理。AD转换芯片型号为AD7705,AD芯片需要时钟电路,CLK-IN与CLK-OUT所接电路即为时钟电路。AD芯片的基准电压由高精度基准源REF5025产生,输出2.5 V的电压作为AD7705的参考电压。
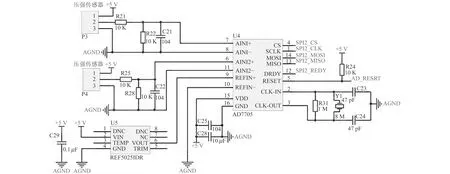
图6 信号采集电路Fig.6 Signal acquisition circuit
2.2 数据基站
数据基站部分包括Cortex-M3微控制器、ZigBee协调器、Wi-Fi模块、LTE Cat-1物联网模块、锂电池充放电电路等。ZigBee协调器负责收集多个终端节点的沉降数据,并发送给Cortex-M3微控制器,微控制器再将这些数据通过LTE Cat-1发送至远端的服务器,用户可以通过连接Wi-Fi实时、原地查看数据。上述部分电路与数据采集终端的电路相似,不再赘述。
LTE Cat-1通信模块型号为WH-GM5,是首款Cat-1联网通信模组,支持MQTT协议,并且支持自定义注册包、心跳包功能,支持2路Socket连接,可更加快速地将用户数据传输到网络。其外围电路如图7所示,电源电路并联4个滤波电容,供电电压为3.8 V,UART0_RXD和UART0_TXD为串口,用于接收微控制器传输过来的数据和固件烧录,与微控制器的串口4连接。
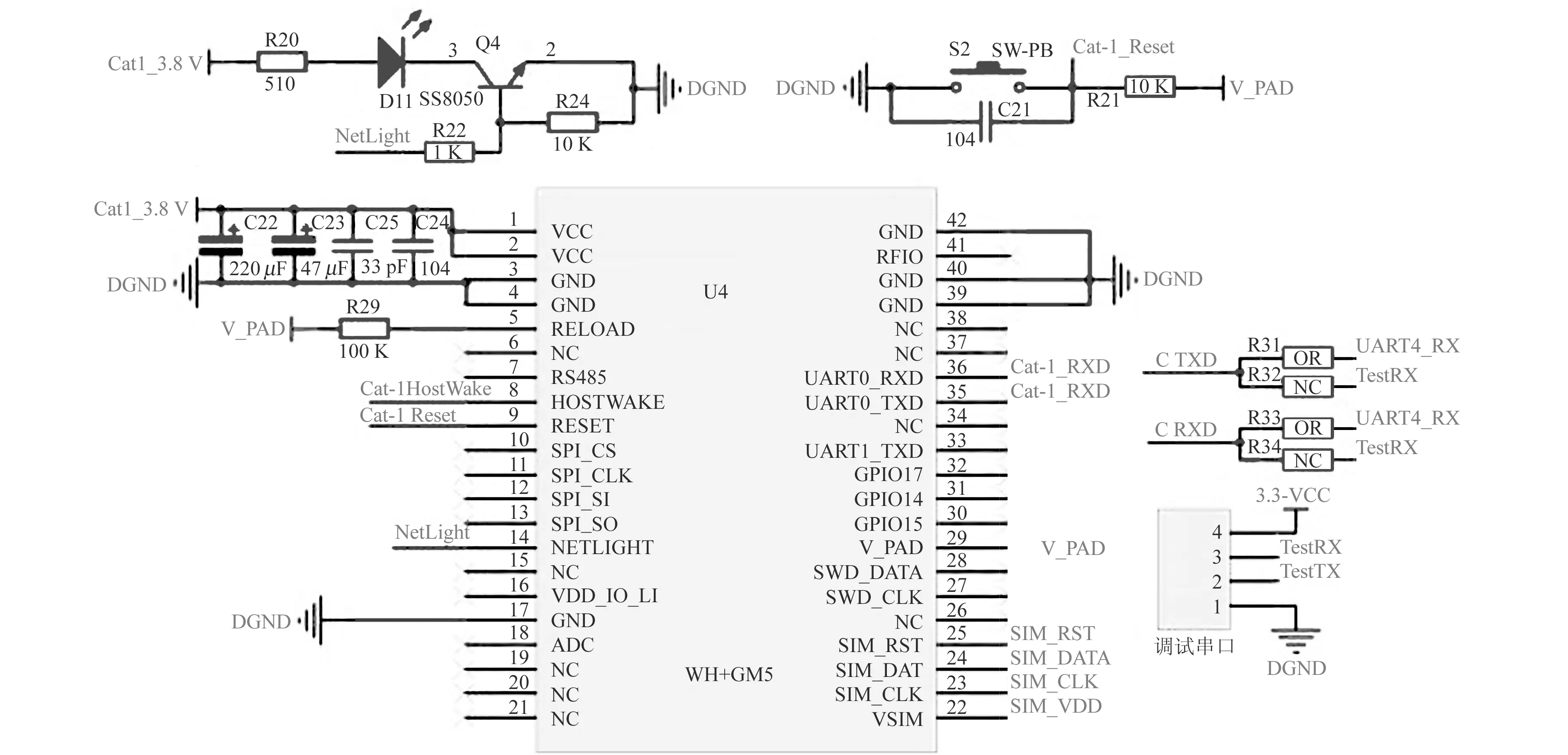
图7 LTE Cat-1通信电路Fig.7 LTE CAT-1 communication circuit
图8为锂电池充电电路,所用芯片型号为GS7001,是一款双节电池线性式充电芯片,输出电压为8.4 V ,输入电压为4.2~18 V。P1端口为电压输入端,P2为锂电池,电能经过降压、整流、滤波之后存储在锂电池中。D8为充电指示灯,红色代表电量已经充满,绿色代表正在充电。
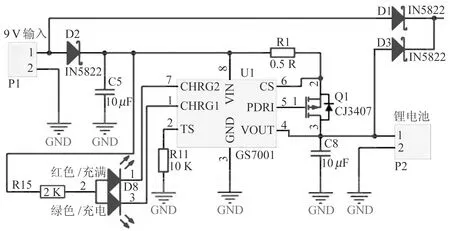
图8 锂电池充电电路Fig.8 Lithium battery charging circuit
图9所示为降压/稳压电路,所用芯片型号为MP1482,此芯片的输入电压范围为4.75~18 V,输出电压范围为0.923~15 V,能够完成8.4 V电压向3.3 V、3.8 V电压的转换,加上滤波、整流电路即可完成降压/稳压功能。
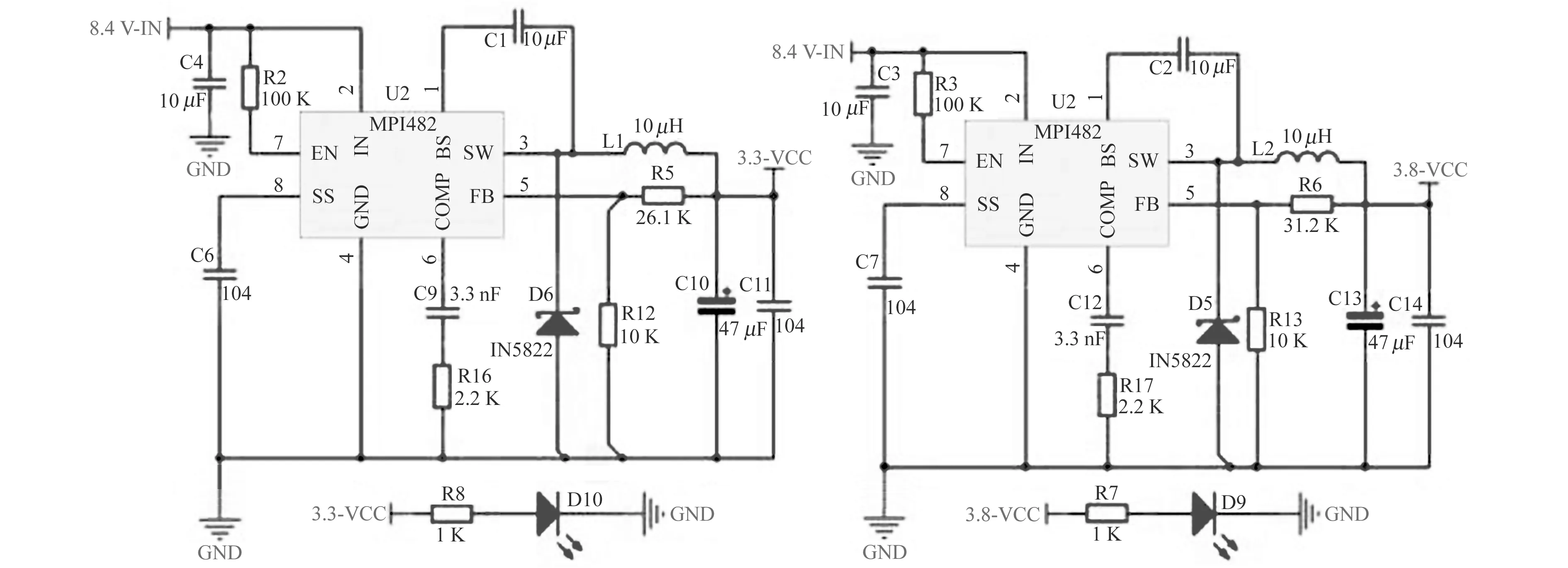
图9 降压/稳压电路Fig.9 Buck regulator circuit
3 系统软件设计
3.1 数据采集终端
FreeRTOS 作为一个轻量级的操作系统,功能包括任务管理、时间管理、内存管理等,任务调度机制是其核心技术,支持抢占式调度、时间片调度、合作式调度3种调度方式。
图10为数据采集终端的主程序流程。程序一开始进入系统初始化,分为硬件外设初始化和FreeRTOS操作系统初始化,硬件外设初始化有I/O口的配置、串口的初始化等,操作系统初始化有选择任务调度方式、函数参数的设置等;接着进入创建任务,分为ZigBee接收、压强数据获取、数据处理、ZigBee发送等4个子任务,并设置每个任务的优先级、栈大小等,操作系统根据优先级的高低自动切换任务的进程,4个任务中最为重要的是数据处理子任务,负责将压强数据转换为高度,并与原始状态变化后的高度作差,得出沉降的高度。
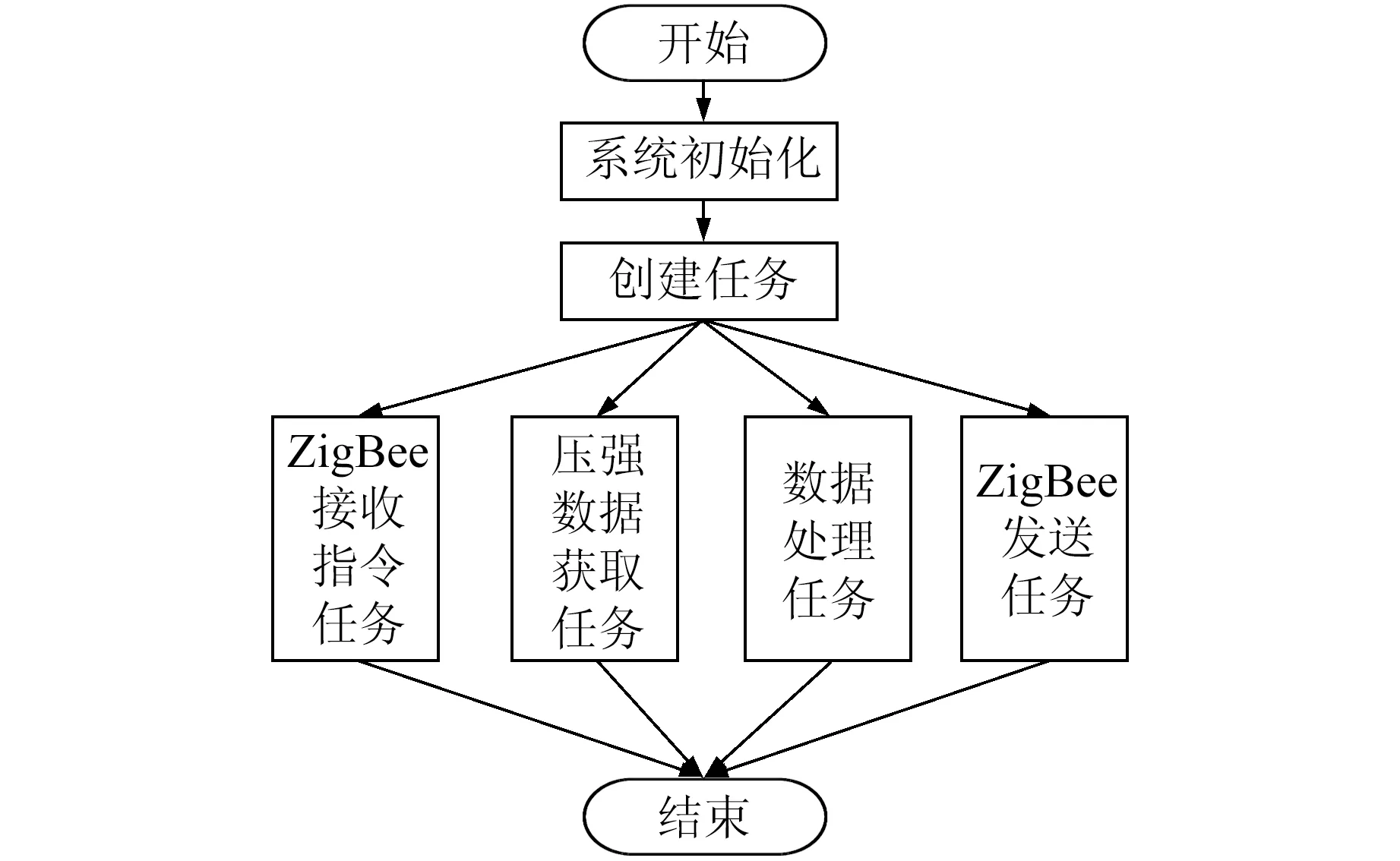
图10 数据采集终端主程序流程Fig.10 Main program flow of data acquisition terminal
3.2 数据基站
图11为数据基站的主程序设计流程,本部分设计同样是基于FreeRTOS操作系统,故大致流程与数据采集终端相似,不同之处在于所创建的任务分为ZigBee接收数据任务、Wi-Fi响应上位机任务、Wi-Fi与上位机通信任务、Cat-1响应服务器并上传数据任务等。通过Wi-Fi与上位机通信任务,用户可原地、实时查看采集到的沉降数据;通过Cat-1响应并上传数据任务,直接将数据传输至质检中心和相关市政工程部门,可防止出现数据造假等行为。
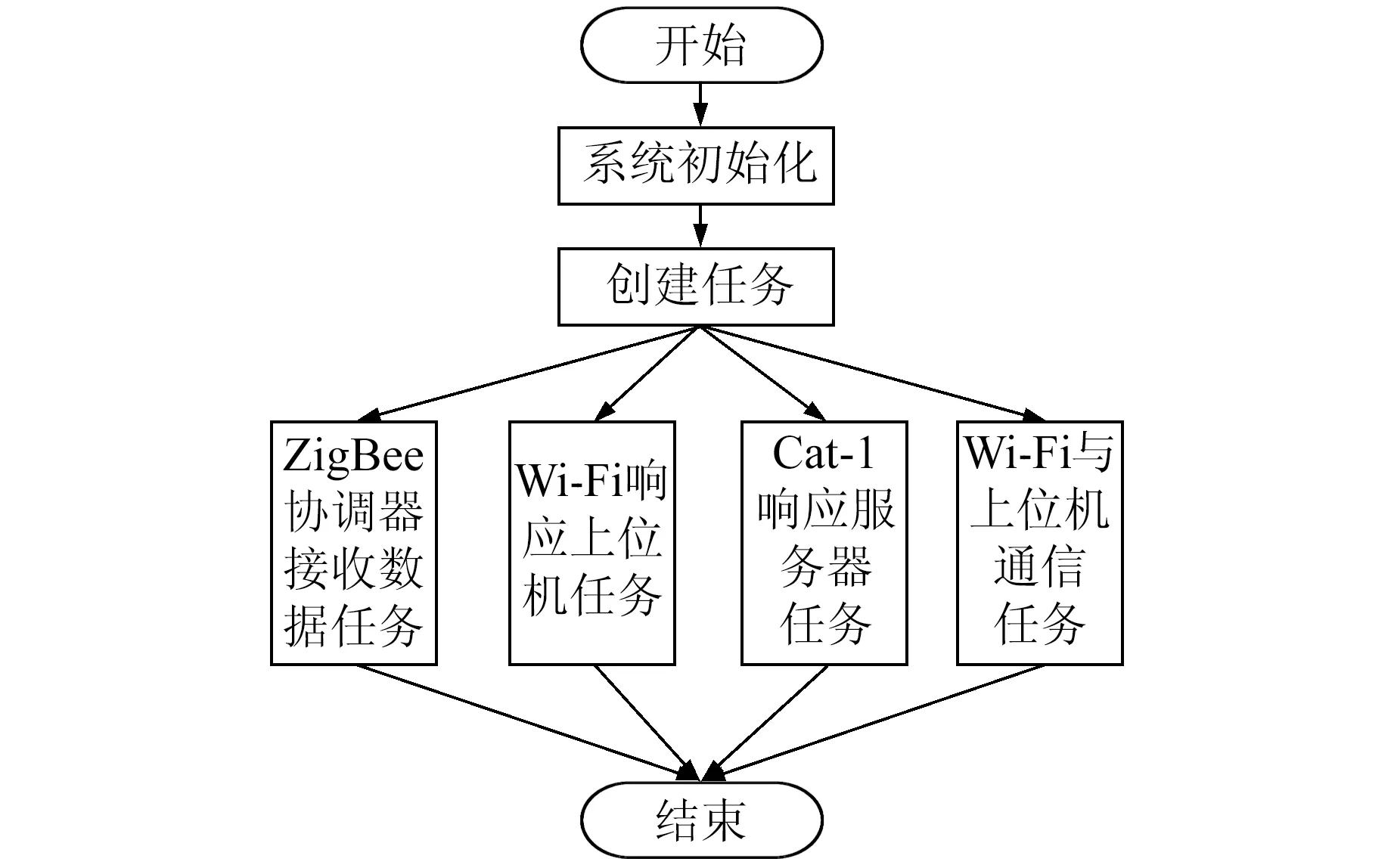
图11 数据接收基站主程序流程Fig.11 Main program flow of data receiving base station
图12为WH-GM5模组与服务器的连接流程,主要通过调用AT指令集来实现,部分AT指令集及功能描述如表1所示。模组初始化后,首先发送AT+ICCID指令,查询模块的ICCID码,所有AT指令在查询参数之后都会返回“OK”信息,故延时等待300 ms之后判断是否收到“OK”信息,返回“OK”则说明查询成功。接着发送AT+NATEN=ON指令,打开网络,该指令有ON和OFF两个赋值参数,分别代表打开和关闭网络。之后发送AT+CSQ指令,查询信号的强度与质量,并判断信号的质量是否等于99或0,若为此数值,说明无信号,需要继续等待与查询信号的质量。当信号质量不为99或0时,说明该信号质量可以进行数据传输,于是发送AT+SOCKA=TCP指令,设置服务器的IP和端口,IP设置为114.115.166.243,端口号为1883,与对应的服务器进行连接,连接稳定后返回OK。
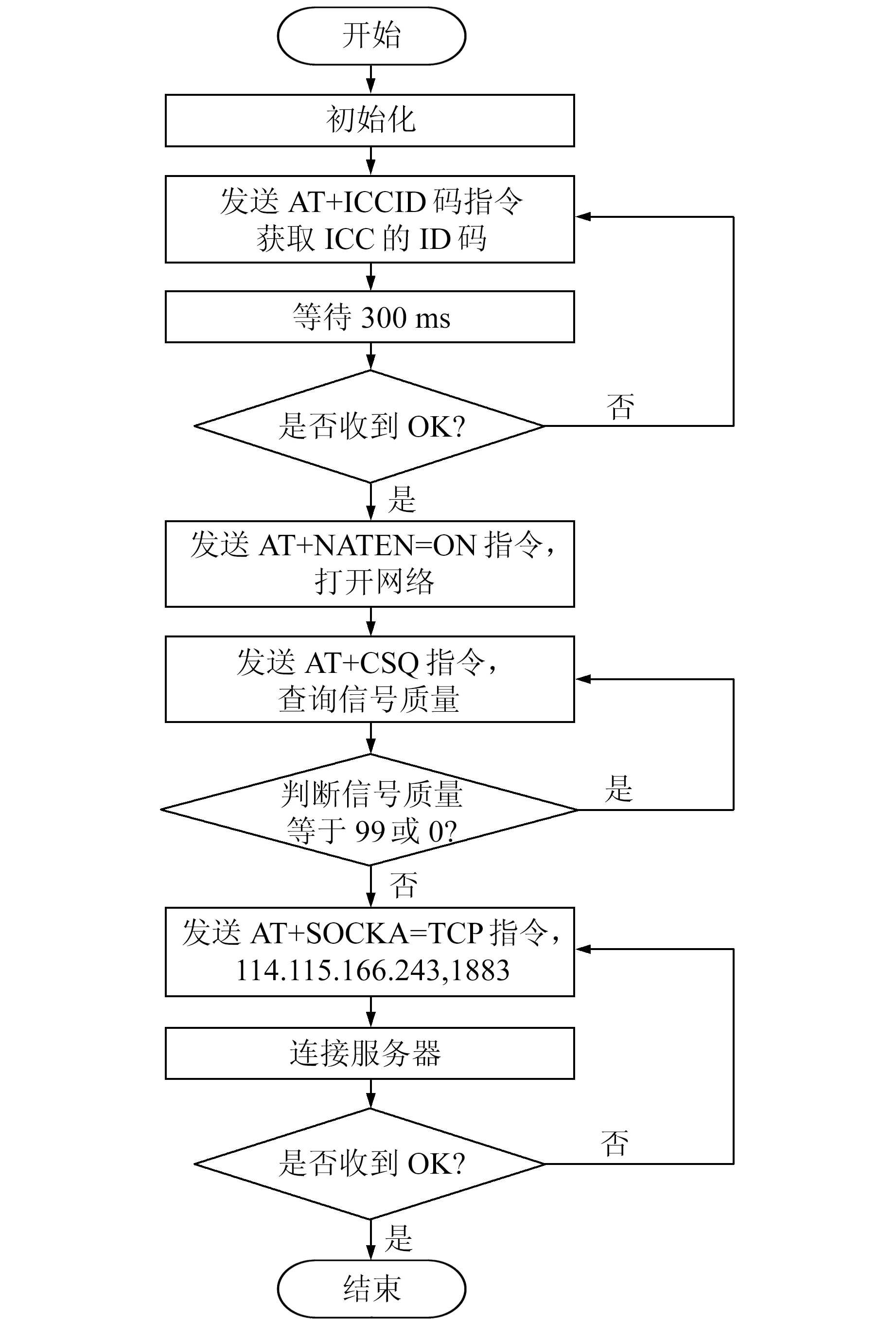
图12 LTE Cat-1物联网通信流程Fig.12 LTE Cat-1 internet of things communication flow
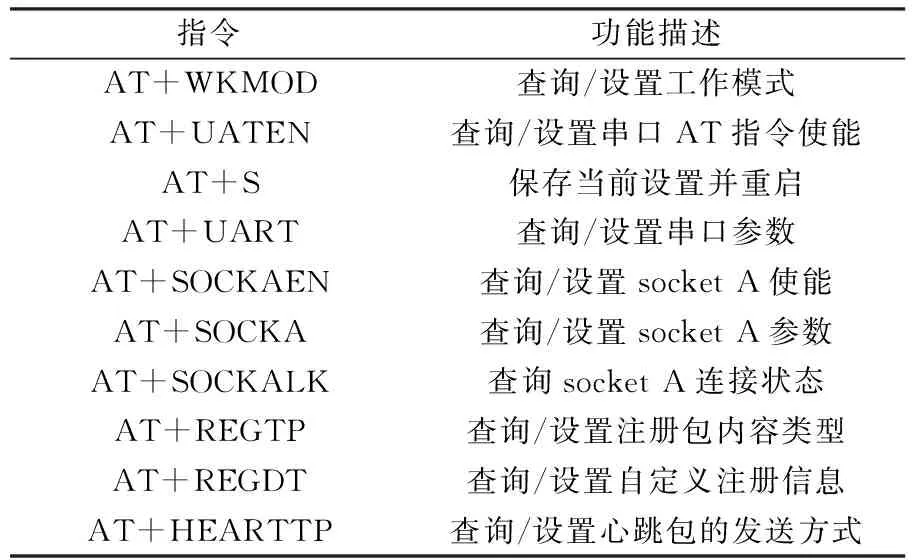
表1 WH-GM5部分AT指令集
4 系统测试
将电子元件与芯片按照硬件电路设计的方式焊接到PCB板上,并使用万用表进行测量、调试,检查是否存在短路、断线等情况。
检查系统的可用性之后进行实际测量,系统多点监测安装及连接示意图如图13所示。初始状态时基准点与各测点在同一平面,液面高度相同;当建筑体发生沉降后,其中一些测点位置静力水准仪下沉,液面高度会发生变化。
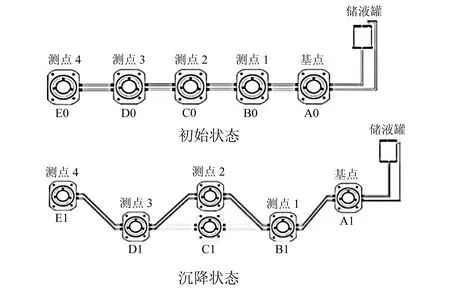
图13 系统多点监测安装及连接示意图Fig.13 Schematic diagram of system multi-point monitoring installation and connection
实际测试步骤为:1)将储液罐预装适量的水(尽量是纯净水),并固定在初始位置;2)在被测物体的固定点安装静力水准仪并开机;3)连接储液罐与静力水准仪之间的水管及气管;4)打开上位机软件,连接数据接收基站Wi-Fi;5)设置上位机工程参数,并下发开始采集指令;6)获取数据并展示。
为了测试系统的精度、稳定性及性能,任意选取3台静力水准仪进行数据分析。3台水准仪的初始液位高度分别为66.360 mm、64.343 mm、67.410 mm,检测时间为2021-02-26~02-28。静力水准仪数据如图14所示,可以看出,测试期内3台静力水准仪的数据变化量分别为0.030 mm、0.033 mm、0.040 mm,基本没发生变化,无突变数据。测试结果表明,本系统设计稳定性好,受外界环境影响小。
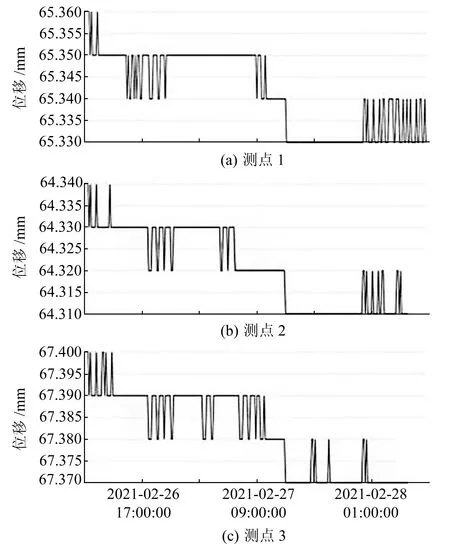
图14 监测平台数据Fig.14 Data of the monitoring platform
5 结 语
不均匀沉降现象是现代建筑在建设过程中不可忽视的问题,可能会导致建筑物倾斜、破裂甚至倒塌,针对这一状况,本文在传统静力水准仪的基础上进行了2个改进:1)将ZigBee组网技术应用于静力水准仪系统设计,形成大规模的监测节点,提高监测范围与精度;2)将LTE Cat-1物联网通信技术应用于系统中,虽然选取的不是通信速率最快的物联网技术,但综合成本、复杂度、功耗、通信速率等方面是最合适的,能直接将现场数据上传至服务器,避免用户的造假行为。另外,本系统设计的软件以FreeRTOS操作系统为基础,系统的实时性更高。
猜你喜欢
防爆电机(2022年1期)2022-02-16 01:13:56
昆钢科技(2021年6期)2021-03-09 06:10:24
装备制造技术(2020年4期)2020-12-25 05:26:00
电子制作(2017年14期)2017-12-18 07:07:58
体育科学研究(2015年5期)2015-02-28 17:06:39
发明与创新(2015年26期)2015-02-27 10:39:31
单片机与嵌入式系统应用(2014年8期)2014-03-23 23:18:21
吉林地质(2014年3期)2014-03-11 16:47:29
单片机与嵌入式系统应用(2014年9期)2014-03-11 15:35:13
电子设计工程(2014年18期)2014-02-27 12:00:35