
海上地震勘探过障碍物变观系统设计与应用
2022-01-08 07:32:12邱能根孙永全夏竹君薛志刚轩义华龙黎
石油工业技术监督 2021年12期
邱能根,孙永全,夏竹君,薛志刚,轩义华,龙黎
1.中海油能源发展股份有限公司 工程技术深圳分公司(广东 深圳 518054)
2.中海石油(中国)有限公司 深圳分公司(广东 深圳 518054)
0 引言
南海东部近5 年的勘探实践表明,中浅层在地质储量占比、贡献以及动用率方面遥遥领先[1],未来几年南海东部中浅层油气勘探开发仍为增储上产的重要领域。而中浅层勘探方向以浅水富烃洼陷周边挖潜,成熟区构造和岩性圈闭复式勘探以及围绕设施进行勘探开发一体化为主,因此对这些区域的地震资料品质要求越来越高[2]。早期对浅水区域的勘探,从兼顾采集资料品质和施工效率的角度考虑,国内海上三维地震采集大多采用单船拖缆的施工方式[3],而这些区域随着勘探进程的深入,海上设施(包括平台、FPSO、工程管道等)也越来越多,受障碍物的影响,传统的单船拖缆施工方式(图1)已经无法施工,从而导致无法获得障碍物周边区域地层的反射资料,继而造成面元覆盖图在障碍物区域出现空白或空洞现象,地震资料出现浅层剖面缺口效益,这显然不符合高精度勘探的要求及缺口效益形成原理[4](图2)。
图1 传统单船拖缆过障碍物施工示意图
图2 剖面缺口原理示意图
“单船+双船”施工模式,从源头出发,对施工设计进行优化,并在南海东部EP24 过平台作业中实践。实践结果表明:这种施工模式,能够很大程度改善障碍物附近面元覆盖问题,从而为平台区域地质目标评价以及开发油藏动态监测提供更多基础资料,也为类似过障碍物施工设计提供一种参考。
1“单船+双船”过障碍物变观设计
1.1 单船过障碍物变观设计
海上拖缆地震资料采集在进行变观设计时,要遵循覆盖次数一致性原则。而单船过障碍物变观则是在传统束状观测系统的基础上进行变观,即在合适的位置改变航行轨迹,从而减小传统观测方式因船舶无法到达障碍物区域,造成的施工面积空窗,出现面元空洞的问题。如何选择合适的位置改变航行轨迹,实际作业时,要根据障碍物的大小,以及船舶的操控能力来调整变观策略。单船变观及其主要参数如图3 所示,其包括航行线偏移距离O和偏移方向,船舶响应距离L1,过障直线距离L0等。
对比图1 和图3 可知,变观设计后采集空白区域从矩形区域缩小为多边形区域,单船过障碍物相比传统施工方式,采集空白区域有所缩小,无论是面元覆盖还是剖面缺口效益都将得到改善,但是由于作业安全距离的局限性,这种缺口依然比较大。因此引入双船变观,配合单船变观施工方式,以最大程度改善面元缺口。
图3 单船过障碍物变观参数示意图
1.2 双船过障碍物变观设计
双船作业,即是在单船拖缆船的基础上,加入一条从船(震源船或炮船),采用双船作业放隔山炮的方式弥补平台下方信息的缺失,即依靠调节从船(震源船)与电缆拖带船的相对位置,实现反射点相对位置调整,以获得障碍物下的地震资料[5]。实际作业中,双船之间的位置关系也需要根据障碍物的大小和形状以及施工的天气和海况,进行实时调整。双船位置关系和调整参数如图4所示。

图4 双船作业相对位置关系及调整参数示意图
对比图3和图4,采用双船作业方式可以弥补单船作业窄方位角、小偏移距以及作业灵活性差的缺点,震源船没有拖缆和扩展器的限制,可以更加靠近障碍物,从而最大程度地增加平台附近的反射,进一步减小甚至弥补平台附近的反射缺口。
2 EP23-1过平台变观正演模拟
EP24工区位于南海珠江口盆地EP油田采集区域,EP 油田作为南海最早开发的区域,是典型的油气开发成熟区,区域内遍布多种海上设施,工区内存在FPSO、平台、浮标等障碍物,导致施工难度大,传统的单船拖缆施工方式,无法完成这些障碍物附近资料采集,故本次采集采用“单船+双船”变观方式进行实施,最大程度获取障碍物附近资料,为后续储层评价和开发生产提供更多的基础资料。
EP24工区内遍布多种障碍物,受这些障碍物影响,以工区中EP23-1平台附近采集为例,以传统的束状观测系统进行施工,由HYSY718 船执行,双源6缆6 000 m拖缆作业,障碍物附近将有大片区域无法进行采集,导致面元呈现空白带和空洞现象。
为解决以上空白带无法采集问题,本次采集从源头出发,在采集设计时就进行变观设计,采用“单船+双船”模式执行施工,在传统拖缆设计的基础上进行变观设计,共部署6 条单船变观线和6 条双船变观线,如图5所示。
图5 EP23-1平台单船+双船过障碍物变观测线示意图
本次单船变观依然由HYSY718船执行,单船变观正演面元情况如图6(a)所示。从图中可以看出,EP23-1平台附近面元覆盖得到很大改善,资料缺口进一步缩小。
本次双船变观作业采用海洋石油721(主船)双源10缆6 000 m拖缆作业、海洋石油718(辅助船)作为震源船执行采集。
静水条件下,辅助船震源距离边缆横距>90 m,纵距>170 m,为辅船的安全作业距离,双船作业正演情况如图6(b)所示。从图中可以看出,EP23-1平台附近面元得到很大程度改善,采集缺口进一步缩小,继而能够补充获得的地震资料,为该平台油气藏监测和开发目标评价提供更多的基础资料。
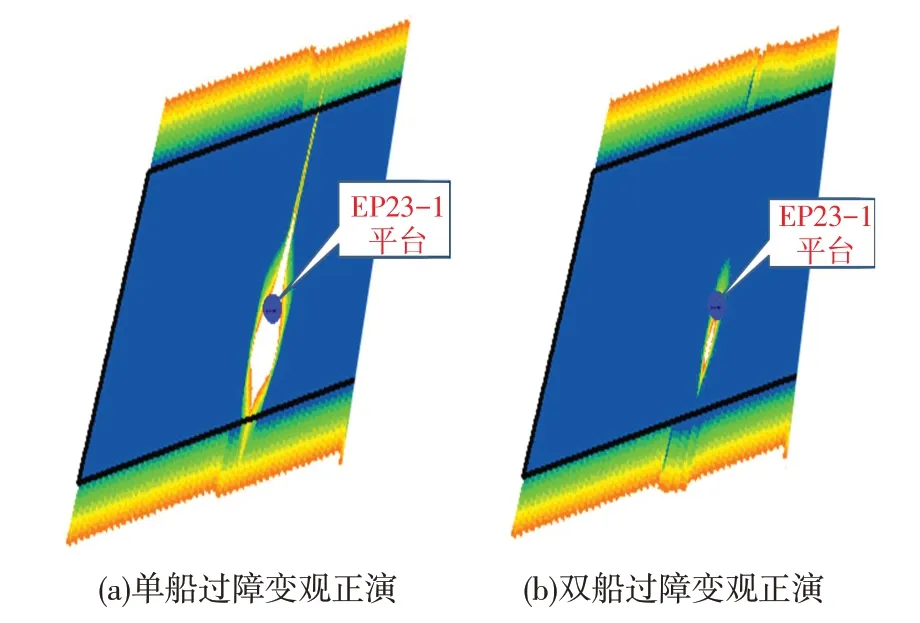
图6 EP23-1平台单、双船过障碍物变观正演面元显示
3 EP24工区变观方案应用效果
EP24 工区实际采集作业采用单船结合双船的变观方案,安全距离的设定结合现场实际海况,考虑羽角的影响(现场实际羽角在5°以内),综合实时导航监视系统[6],实时监视水下设备动态,灵活调整两船间距,采集兼顾现场实时海况,设计双船过平台相对关系。
通过增加变观测线采用“单船+双船”变观方式进行采集,较好地解决了整个工区障碍物附近面元缺失的问题。从图7 最终的面元覆盖情况看,包括EP23-1、EP24-2、EP18-1 以及FPSO 等障碍物附近面元均得到充分的填补,工区内整体面元覆盖更加均匀,工区资料完整性更好。
图7 EP24工区最终采集面元覆盖情况
4 结论
1)随着勘探的深入,传统观测系统已经无法满足高精度勘探的需求,需要引入多样化的采集方式,兼顾采集成本和施工效率,单船和双船变观采集成为首选。
2)EP24过障碍物作业,采用“单船+双船”变观模式,勘探成效显著。本次采集的成功表明:海上过障碍物作业需要具体工区具体分析,在变观设计时要兼顾现场实际海况以及障碍物的形态,做好现场探勘工作。
3)EP24 工区变观采集实践表明,“单船+双船”过障碍物作业能够很大程度弥补采集空白,填补面元覆盖缺失,从而保证障碍物附近资料品质,为后续目标评价以及开发油气藏动态监控等提供更多的基础资料,也为类似海上障碍物附近施工提供设计思路。
猜你喜欢
辽宁师范大学学报(自然科学版)(2022年4期)2022-12-27 12:27:28
世界海运(2021年9期)2021-10-08 06:49:30
减速顶与调速技术(2020年4期)2020-11-22 07:20:34
兵工学报(2019年7期)2019-08-28 01:34:34
船海工程(2018年5期)2018-11-01 09:15:16
录井工程(2017年3期)2018-01-22 08:40:07
隧道建设(中英文)(2017年10期)2017-11-07 07:20:58
中国公路(2017年9期)2017-07-25 13:26:38
装备学院学报(2016年5期)2016-11-14 06:26:42
化工管理(2014年14期)2014-08-15 00:51:32
